You might also like
- Réducteur À Arbre CreuxDocument10 pagesRéducteur À Arbre CreuxBouker Mohamed100% (1)
- Chap02 - Modèle Géométrique Direct PDFDocument19 pagesChap02 - Modèle Géométrique Direct PDFBadr Kaakoua100% (2)
- Sujet 7 PDFDocument15 pagesSujet 7 PDFDODOHICHAMNo ratings yet
- Recueil D' Épreuves DUT-BTS Mécanique - 2003Document19 pagesRecueil D' Épreuves DUT-BTS Mécanique - 2003Bradley CaseNo ratings yet
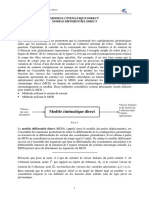
- Modèle Cinématique DirectDocument7 pagesModèle Cinématique DirectsiamNo ratings yet
- AE GM Liaison - Pivot-Roul LightDocument32 pagesAE GM Liaison - Pivot-Roul LightSimoMonkadNo ratings yet
- Klubprepa Extrait 6962Document7 pagesKlubprepa Extrait 6962bhsbhs190% (1)
- DS5 SujetDocument7 pagesDS5 SujetPierre BeckNo ratings yet
- Revisions MecaniquesDocument6 pagesRevisions MecaniquesAbdelali YacoubiNo ratings yet
- DS1 1Document11 pagesDS1 1Wissal GuilloulNo ratings yet
- Rapport Dynamique de StructuresDocument16 pagesRapport Dynamique de Structuresaharchaou houdaNo ratings yet
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaNo ratings yet
- DS6 SujetDocument8 pagesDS6 SujetPierre BeckNo ratings yet
- 12 1Document9 pages12 1Nadia SahliNo ratings yet
- ch1 ModelisationDocument9 pagesch1 ModelisationYoussef ElalaouiNo ratings yet
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddineNo ratings yet
- 2011 2012 MP TD Theorie Des MecanismesDocument4 pages2011 2012 MP TD Theorie Des MecanismesJaouad El50% (4)
- Elements Cinetiques SolidesDocument5 pagesElements Cinetiques SolideshourialaaNo ratings yet
- Kbiswas,+reef 13 737-750Document14 pagesKbiswas,+reef 13 737-750fatma.mabroukiNo ratings yet
- Theorie Des Mecanismes MisDocument42 pagesTheorie Des Mecanismes MisSemlali Zakaria100% (2)
- Chap2 Liaisons Solides VAS2 Potel Gatignol PDFDocument11 pagesChap2 Liaisons Solides VAS2 Potel Gatignol PDFDamien MirandaNo ratings yet
- TD N°3 PFS Analytique - 3Document6 pagesTD N°3 PFS Analytique - 3Yassine BouchattaNo ratings yet
- Polycopie de TD 2013Document70 pagesPolycopie de TD 2013hichamkabel100% (1)
- Projet MSI S3 1Document15 pagesProjet MSI S3 1Omar BenadirNo ratings yet
- TD 08 - Calcul VectorielDocument4 pagesTD 08 - Calcul VectorielYassire Dede BenallaNo ratings yet
- Meca Mobilite Dev PDFDocument8 pagesMeca Mobilite Dev PDFzizo100% (1)
- PT 97 SI1 PDFDocument19 pagesPT 97 SI1 PDFntabNo ratings yet
- Analyse Spectrale Du Courant Statorique Pour Détecter Les Cassures deDocument6 pagesAnalyse Spectrale Du Courant Statorique Pour Détecter Les Cassures desoumaminoNo ratings yet
- Elements Cinetiques SolidesDocument5 pagesElements Cinetiques SolidesMohamed Whb100% (1)
- Exercices Partie1Document8 pagesExercices Partie1Paola CinnellaNo ratings yet
- MecaniqueDocument18 pagesMecaniqueStephane Durel MbidaNo ratings yet
- Ennoncé Pb2 TD4 - Examen MS 18-19Document2 pagesEnnoncé Pb2 TD4 - Examen MS 18-19mohaNo ratings yet
- ds2 23 24Document7 pagesds2 23 24Zineb AjemNo ratings yet
- TP MSD Mo (2Document21 pagesTP MSD Mo (2basmaNo ratings yet
- MAS86&MAI86 Robotique Chapitre3Document39 pagesMAS86&MAI86 Robotique Chapitre3Abd el moumen HemiciNo ratings yet
- RDM 1-2-3-4Document70 pagesRDM 1-2-3-4Thony LikengNo ratings yet
- TDDocument5 pagesTDYassir Ez-znafry100% (1)
- Presentation Mecanique GeneraleDocument137 pagesPresentation Mecanique GeneralezinadsNo ratings yet
- DS 04 MpsiDocument6 pagesDS 04 MpsistophNo ratings yet
- Sec CCP 2004 Sic PSIDocument9 pagesSec CCP 2004 Sic PSIsabaksousou111No ratings yet
- Modélisation GéométriqueDocument16 pagesModélisation GéométriqueAissa HadjoudjaNo ratings yet
- Bac2016 Polynesie Robot Tout Terrain Correction 2Document15 pagesBac2016 Polynesie Robot Tout Terrain Correction 2Ilyas MhammediNo ratings yet
- 138 Ds Mpsi Et Pcsi CinematiqueDocument10 pages138 Ds Mpsi Et Pcsi CinematiqueFaical BharNo ratings yet
- TSI3 ModelisationDocument12 pagesTSI3 Modelisationlouna yunaNo ratings yet
- Sec Minesponts 2004 Sic PSIDocument12 pagesSec Minesponts 2004 Sic PSIAlexandre BourrieauNo ratings yet
- Mecanique Du SolideDocument129 pagesMecanique Du SolideSîdïMôhâmèdBën100% (1)
- TD 17 - Lois Entrée-Sortie en Position Et en VitesseDocument7 pagesTD 17 - Lois Entrée-Sortie en Position Et en Vitessebhs channelNo ratings yet
- TD Cinématique CHARIOT FILOGUIDEDocument4 pagesTD Cinématique CHARIOT FILOGUIDELamia Achour Ep Zanned100% (3)
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- Dimensionnement Des Disques de Turbine de Moteur D ... - mms2Document7 pagesDimensionnement Des Disques de Turbine de Moteur D ... - mms2KarimNo ratings yet
- TPDocument51 pagesTPAbdelilah El GmairiNo ratings yet
- 9005 Modelisation Modelica Sous ScilabDocument16 pages9005 Modelisation Modelica Sous ScilabkamalNo ratings yet
- Résumé MMC - SupAeroDocument6 pagesRésumé MMC - SupAeroMahmoud AyadNo ratings yet
- Cours de RDM 1 - Rapport RDMDocument39 pagesCours de RDM 1 - Rapport RDMThony LikengNo ratings yet
- Examen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Document5 pagesExamen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Ahmed SoltaniNo ratings yet
- Examen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Document5 pagesExamen Mcanique Gnrale 1GM Iset Nabeul Janvier 2011Ahmed SoltaniNo ratings yet
- Train AtterrissageDocument16 pagesTrain AtterrissageJohn JohnNo ratings yet
- Train AtterrissageDocument16 pagesTrain AtterrissageJohn JohnNo ratings yet
- Connaissance Avion Tome 1Document62 pagesConnaissance Avion Tome 1John JohnNo ratings yet
- Voxan Roue LibreDocument9 pagesVoxan Roue LibreJohn JohnNo ratings yet
- 1110 Ad-2Document9 pages1110 Ad-2John JohnNo ratings yet
- Bible Du Moteur 2 TDocument94 pagesBible Du Moteur 2 TlafontenelleNo ratings yet
- Guide Aviation 2011-2013Document68 pagesGuide Aviation 2011-2013John JohnNo ratings yet
- Jet Pack Etude FrenchDocument41 pagesJet Pack Etude FrenchJohn JohnNo ratings yet
- Riblets OneraDocument14 pagesRiblets OneraJohn JohnNo ratings yet
- Memo Securite 2011 - Ed3Document36 pagesMemo Securite 2011 - Ed3John JohnNo ratings yet
- Aerodynamique Physique LivreDocument142 pagesAerodynamique Physique LivreJohn JohnNo ratings yet
- Cours Transfert ThermiqueDocument149 pagesCours Transfert ThermiqueJohn John88% (8)
- Arrete CNRADocument12 pagesArrete CNRAJohn JohnNo ratings yet
- Sujet 9Document8 pagesSujet 9Virgi RebolloNo ratings yet
- Planning Séquentiel Premiere ItalienDocument5 pagesPlanning Séquentiel Premiere ItalienTedondoNo ratings yet
- Fiche de Memorisation Gpme Bilan FonctionnelDocument4 pagesFiche de Memorisation Gpme Bilan Fonctionnelnandhinee974No ratings yet
- Procédés Membranaires Pour Le Traitement de L'eauDocument44 pagesProcédés Membranaires Pour Le Traitement de L'eauSara Qrm100% (1)
- Exercice Uml Corrige PDFDocument2 pagesExercice Uml Corrige PDFJermaleNo ratings yet
- AVIS DE RECRUTEMENT - 13 OPERATEURS Ou OPERATRICES DE PRODUCTIONDocument2 pagesAVIS DE RECRUTEMENT - 13 OPERATEURS Ou OPERATRICES DE PRODUCTIONsamuel tanoNo ratings yet
- Modèles de Parcours ClientDocument10 pagesModèles de Parcours Clientmylie jacksonNo ratings yet
- Cas Léol ABCDocument4 pagesCas Léol ABCChady ZhangNo ratings yet
- Iro 2Document54 pagesIro 2HamzaKadNo ratings yet
- Chapitre 2 VFinale - 2020Document6 pagesChapitre 2 VFinale - 2020BILAL OUAZENENo ratings yet
- Partage HSE 011 À 019Document9 pagesPartage HSE 011 À 019Manong ShegueyNo ratings yet
- Evaluation de L'endommagement Des Pipes Ds LR CDT D'exploitationDocument113 pagesEvaluation de L'endommagement Des Pipes Ds LR CDT D'exploitationsalamNo ratings yet
- Adjectifs Possessifs 3Document3 pagesAdjectifs Possessifs 3JupiraNo ratings yet
- Cours TransfoDocument58 pagesCours TransfoAmadouMalickMouamfonMoumbagnaNo ratings yet
- Seba KMT PDFDocument87 pagesSeba KMT PDFNoureddine DibesseNo ratings yet
- HA0812 CorrigeDocument7 pagesHA0812 CorrigeBrandon NgniaouoNo ratings yet
- Devoir de Synthèse N°3 - Technologie - 2ème Sciences (2012-2013) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°3 - Technologie - 2ème Sciences (2012-2013) MR Abdallah RaouafiFadi WeslatiNo ratings yet
- 2 - Hypertension Intracrânienne IdiopathiqueDocument10 pages2 - Hypertension Intracrânienne Idiopathiqueyaala100% (1)
- Approche Hydrogeochimique A L'etude de La Fluoration Des Eaux de La Nappe Du Complexe Terminal de La Basse Vallee de L'oued M'ya (Ouargla)Document6 pagesApproche Hydrogeochimique A L'etude de La Fluoration Des Eaux de La Nappe Du Complexe Terminal de La Basse Vallee de L'oued M'ya (Ouargla)Mohamed Ali GargouraNo ratings yet
- Le Chevalier Double, Fiche de Langue, Le Schéma NarratifDocument3 pagesLe Chevalier Double, Fiche de Langue, Le Schéma NarratifYoussef ShebNo ratings yet
- Fiche n2 LangueDocument2 pagesFiche n2 LangueAyman Benkhdim0% (1)
- Devoir de Synthèse N°2 2007 2008 (Moknine Monastir)Document3 pagesDevoir de Synthèse N°2 2007 2008 (Moknine Monastir)Omar MakhNo ratings yet
- Gestionstock23 BakDocument16 pagesGestionstock23 BakEtudiant du FasoNo ratings yet
- TP Modele GeometriqueDocument8 pagesTP Modele GeometriqueAmine EL FERHANINo ratings yet
- Les Liaisons Dangeureuses PDF ResumeDocument31 pagesLes Liaisons Dangeureuses PDF Resumeda silvaNo ratings yet
- Corrigé DCG 2020 UE1 Dossier 4 - Protection Du PatrimoineDocument5 pagesCorrigé DCG 2020 UE1 Dossier 4 - Protection Du PatrimoinemouradNo ratings yet
- Tome11 SondagesminiersDocument43 pagesTome11 SondagesminiersOumaima ChatouaneNo ratings yet
- CorrectionDocument4 pagesCorrectionAri NomNo ratings yet
- 970 Presentation Gendarmerie BDDocument12 pages970 Presentation Gendarmerie BDquichecejeuNo ratings yet
- Annales BTSgroupement CDocument50 pagesAnnales BTSgroupement CElyess Hammami (Wime)No ratings yet