You might also like
- EE602 Radar Notes-1Document41 pagesEE602 Radar Notes-1Yash Nimje100% (1)
- Chapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingDocument37 pagesChapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingrajeevNo ratings yet
- Radar MCQDocument6 pagesRadar MCQSatish100% (1)
- Radar MCQDocument12 pagesRadar MCQRaju Budigonda71% (14)
- MCQ Radar SystemsDocument9 pagesMCQ Radar SystemsVinith ChauhanNo ratings yet
- Radar Systems NotesDocument457 pagesRadar Systems NotesMridula Mittal Bansal100% (2)
- Fundamental Principles of Radar Solution ManualDocument58 pagesFundamental Principles of Radar Solution Manualamarendra.jadda100% (1)
- Radar Questipons For IsroDocument16 pagesRadar Questipons For IsroSaipraveen KumarNo ratings yet
- Radar and Satellite MCQsDocument32 pagesRadar and Satellite MCQsRashi SharmaNo ratings yet
- Radar Systems Objective Type QuestionsDocument13 pagesRadar Systems Objective Type QuestionsPendem naveen100% (1)
- Radar PrinciplesDocument49 pagesRadar PrinciplesShashank Narain0% (1)
- Radar BitsDocument2 pagesRadar BitsSai ChetanaNo ratings yet
- MCQ - SAtellite and CommunicationsDocument11 pagesMCQ - SAtellite and CommunicationsTanyaGarg100% (1)
- Navaids QuestionnaireDocument10 pagesNavaids QuestionnaireLorenz Ardiente100% (1)
- Radar Engineering and Fundamentals of Navigational Aids - G. S. N. RajuDocument124 pagesRadar Engineering and Fundamentals of Navigational Aids - G. S. N. RajuAbril de Vera0% (5)
- Radio Wave Propagation MCQsDocument89 pagesRadio Wave Propagation MCQsJohn Paul Cordova67% (9)
- MCQ AntennaDocument26 pagesMCQ AntennaRadha Nandhini100% (5)
- Exam 2016 RadarDocument13 pagesExam 2016 Radaradib50% (2)
- Navigational Aids & Radar (TC) Lab Manual 2010Document45 pagesNavigational Aids & Radar (TC) Lab Manual 2010Saurabh Patel100% (1)
- PSU MCQs On Satellite Communication and RadarDocument6 pagesPSU MCQs On Satellite Communication and RadarMohan Devaraj67% (3)
- D. Intermediate Frequency. 2. Magnetrons Commonly: (Mid RS)Document12 pagesD. Intermediate Frequency. 2. Magnetrons Commonly: (Mid RS)aziz100% (1)
- Objective Questions On Microwave Devices For BSNL and ISRO ExamsDocument29 pagesObjective Questions On Microwave Devices For BSNL and ISRO ExamsRaj Kumar50% (4)
- Everything You Need to Know About Satellite CommunicationsDocument25 pagesEverything You Need to Know About Satellite Communicationsburnnah leezahNo ratings yet
- MCQs in Satellite Communications Part I - PinoyBIX - Engineering ReviewDocument9 pagesMCQs in Satellite Communications Part I - PinoyBIX - Engineering ReviewKitacatesNo ratings yet
- Radar SystemsDocument12 pagesRadar SystemsSaikiran SrinivasaNo ratings yet
- Communication Navigation MCQsDocument9 pagesCommunication Navigation MCQsjbanawazNo ratings yet
- MCQ's Radiowave PropagationDocument33 pagesMCQ's Radiowave PropagationRomeo Ganelo100% (8)
- MTI and Pulse Doppler Radar TechniquesDocument81 pagesMTI and Pulse Doppler Radar TechniquesHaneesh SurviNo ratings yet
- Primary & Secondary Radar - Avionics Questions and Answers - Sanfoundry PDFDocument12 pagesPrimary & Secondary Radar - Avionics Questions and Answers - Sanfoundry PDFmurugeshNo ratings yet
- Introduction To Radar Systems - 2014Document38 pagesIntroduction To Radar Systems - 2014lfsa90No ratings yet
- EC6602-Antenna and Wave Propagation Important Questions 2Document15 pagesEC6602-Antenna and Wave Propagation Important Questions 2Sornagopal VijayaraghavanNo ratings yet
- MCQs ON BROADCASTING AND CABLE TV SYSTEMSDocument21 pagesMCQs ON BROADCASTING AND CABLE TV SYSTEMSLovielyn Poquiz De VeraNo ratings yet
- Wireless Communications TLSingal Chapter 03 Self Test Quiz With AnswersDocument7 pagesWireless Communications TLSingal Chapter 03 Self Test Quiz With AnswersDuy LeNo ratings yet
- Radar Systems Exam 2010Document23 pagesRadar Systems Exam 2010YanKezaNo ratings yet
- RADAR Probems (Eng)Document51 pagesRADAR Probems (Eng)abd syNo ratings yet
- Antennas and Radio Wave PropagationDocument7 pagesAntennas and Radio Wave PropagationMike PuaNo ratings yet
- Questionnaires Antennas CH 1 & 2Document5 pagesQuestionnaires Antennas CH 1 & 2Joshua CarrionNo ratings yet
- Antenna McqsDocument7 pagesAntenna McqsTalha KhalidNo ratings yet
- 11 - Satellites MCQ QuestionsDocument9 pages11 - Satellites MCQ QuestionsMohamed AlfarashNo ratings yet
- Link BudgetDocument61 pagesLink BudgetElshazly Abd Elrouf100% (1)
- Mobile Communication MCQsDocument15 pagesMobile Communication MCQsVijay Kumar TNo ratings yet
- Question BankDocument6 pagesQuestion BankpikluNo ratings yet
- SECTION 4 - RF System DesignDocument44 pagesSECTION 4 - RF System DesignBelachew AndualemNo ratings yet
- R7410404 Radar SystemsDocument4 pagesR7410404 Radar SystemssivabharathamurthyNo ratings yet
- 2018-22 R18 ECE Co-Po MappingDocument106 pages2018-22 R18 ECE Co-Po Mapping51-Naman JainNo ratings yet
- Evolution of Mobile Communication FundamentalsDocument50 pagesEvolution of Mobile Communication FundamentalsKshitij PalNo ratings yet
- Important MCQ - Microwave CommunicationDocument8 pagesImportant MCQ - Microwave CommunicationarijitlgspNo ratings yet
- Amw MCQDocument150 pagesAmw MCQSanthosh PaNo ratings yet
- Ece Vii Optical Fiber Communication (06ec72) NotesDocument253 pagesEce Vii Optical Fiber Communication (06ec72) NotesPrashant Hatti70% (10)
- Satellite Communication MCQDocument61 pagesSatellite Communication MCQdeptNo ratings yet
- Department of Electronics and Communication Engineering: 2 and 16 Mark Questions and AnswersDocument16 pagesDepartment of Electronics and Communication Engineering: 2 and 16 Mark Questions and Answersanjali9myneni100% (1)
- 14EC801 - Radar Engineering: Unit IDocument7 pages14EC801 - Radar Engineering: Unit IMadhavi GNo ratings yet
- EC6015 - Radar and Navigational Aids VII Semester ECEDocument10 pagesEC6015 - Radar and Navigational Aids VII Semester ECEJaydip MakwanaNo ratings yet
- Navigational Aids and RADAR Systems ExplainedDocument11 pagesNavigational Aids and RADAR Systems ExplainedYael LawlietNo ratings yet
- Ec6015 QB 12Document13 pagesEc6015 QB 12DivyaNo ratings yet
- Project ProposalDocument19 pagesProject ProposalSougat Dhungel100% (2)
- RCS measurement of standard targets using VNADocument43 pagesRCS measurement of standard targets using VNARajat RathiNo ratings yet
- Radar :radio Detection and Ranging Seminar ReportDocument18 pagesRadar :radio Detection and Ranging Seminar ReportRavindra Mathanker89% (9)
- Wa0002 PDFDocument21 pagesWa0002 PDFDevendra VarmaNo ratings yet
- Mti Radar: BY: A. Ajay KumarDocument31 pagesMti Radar: BY: A. Ajay KumarsnehaNo ratings yet
- Ge6075 Professional Ethics in EngineeringDocument47 pagesGe6075 Professional Ethics in Engineeringainugiri100% (1)
- Updates Resume Giri PrasadDocument4 pagesUpdates Resume Giri PrasadainugiriNo ratings yet
- Wireless Local Area NetworkDocument331 pagesWireless Local Area Networkainugiri100% (2)
- 07 11 04Document224 pages07 11 04xenocid3rNo ratings yet
- The Anatomy of The GridDocument2 pagesThe Anatomy of The GridainugiriNo ratings yet
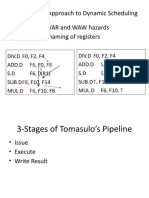
- Computer ArchitectureDocument100 pagesComputer ArchitectureainugiriNo ratings yet
- When A New Line Is Loaded Into The Cache, OneDocument2 pagesWhen A New Line Is Loaded Into The Cache, OneainugiriNo ratings yet
- Memory Hierarchy and Cache ManagementDocument100 pagesMemory Hierarchy and Cache ManagementainugiriNo ratings yet
- CS1623 Mobile Communication Dr. Hari's Question Bank Part ADocument6 pagesCS1623 Mobile Communication Dr. Hari's Question Bank Part AainugiriNo ratings yet
- CS1601 Computer ArchitectureDocument389 pagesCS1601 Computer Architectureainugiri100% (1)
- Random Access Memory and ProblemsDocument89 pagesRandom Access Memory and ProblemsainugiriNo ratings yet
- Transmission Lines and Wave Guides Ec 1305Document27 pagesTransmission Lines and Wave Guides Ec 1305ainugiri67% (3)
- RTP TutorialDocument85 pagesRTP Tutorialainugiri100% (3)
- Sockets NotesDocument15 pagesSockets Notesom18sahuNo ratings yet
- Theoretical Study of Cache Systems: Dmitry DolgikhDocument17 pagesTheoretical Study of Cache Systems: Dmitry DolgikhainugiriNo ratings yet
- Notification InstructionsDocument5 pagesNotification InstructionsainugiriNo ratings yet
- SortingDocument24 pagesSortingainugiri0% (1)
- Cache FundamentalsDocument4 pagesCache FundamentalsainugiriNo ratings yet
- Peterson's Algorithm in A Multi Agent Database SystemDocument14 pagesPeterson's Algorithm in A Multi Agent Database SystemainugiriNo ratings yet
- SDocument4 pagesSainugiriNo ratings yet
- RTP SlidesDocument42 pagesRTP Slidesainugiri0% (1)
- SdarticleDocument9 pagesSdarticleainugiriNo ratings yet
- Question Bank CS1601Document19 pagesQuestion Bank CS1601ainugiriNo ratings yet
- EC1402 Optical CommunicationDocument25 pagesEC1402 Optical CommunicationarunecethebossNo ratings yet
- Peterson's Algorithm in A Multi Agent Database SystemDocument14 pagesPeterson's Algorithm in A Multi Agent Database SystemainugiriNo ratings yet
- Microwave Engineering Ec 432Document25 pagesMicrowave Engineering Ec 432ainugiriNo ratings yet
- PHD Thesis Ef Cient Algorithms For Sorting andDocument115 pagesPHD Thesis Ef Cient Algorithms For Sorting andGabryel BogdanNo ratings yet
- MG 1351 - Principles of ManagementDocument15 pagesMG 1351 - Principles of ManagementainugiriNo ratings yet
- Nist SP 800-48Document119 pagesNist SP 800-48Shukur MohammedNo ratings yet
- Memtech 2005 Am 09Document15 pagesMemtech 2005 Am 09ainugiriNo ratings yet
- Airport ResearchDocument17 pagesAirport ResearchCharineNo ratings yet
- Easa Mod 11Document14 pagesEasa Mod 11Abdullah JwifallNo ratings yet
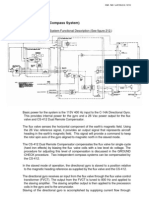
- C-14a Directional GyroDocument47 pagesC-14a Directional GyroJizzPontes100% (2)
- Sample paper 1 multiple choice questionsDocument8 pagesSample paper 1 multiple choice questionsKunal Thakran100% (1)
- Piper Warrior II User ManualDocument60 pagesPiper Warrior II User Manualottuser100% (1)
- Apft Cpl-Progresstest1-Rnav Page 1 of 8Document8 pagesApft Cpl-Progresstest1-Rnav Page 1 of 8vivekNo ratings yet
- Superseded: Subject No 56 Instruments and Navigation AidsDocument7 pagesSuperseded: Subject No 56 Instruments and Navigation AidsÖmer KeklikNo ratings yet
- B737 Standard Operating Procedure User GuideDocument24 pagesB737 Standard Operating Procedure User GuideYash Srivastava67% (3)
- WGS-84 Manual: Your Guide to the Global Coordinate SystemDocument124 pagesWGS-84 Manual: Your Guide to the Global Coordinate SystemДраган ДрагановNo ratings yet
- BOEING B757-The Cali Accident (Part 1)Document8 pagesBOEING B757-The Cali Accident (Part 1)Miran MirNo ratings yet
- Communications ElectDocument179 pagesCommunications ElectAshish Kumar100% (1)
- Aerodrome Location and Operational Details for Sir Seewoosagur Ramgoolam International AirportDocument22 pagesAerodrome Location and Operational Details for Sir Seewoosagur Ramgoolam International AirportNadeemNo ratings yet
- IAP SymbolsDocument10 pagesIAP Symbolshoushang5No ratings yet
- Model1118A 1119A LQ mm08440Document2 pagesModel1118A 1119A LQ mm08440Vikram Raj SinghNo ratings yet
- AFMAN11-217 v.3Document209 pagesAFMAN11-217 v.3Alzheimer RachNo ratings yet
- UH-1H Huey Radio and Navigation Equipment v. 1.0Document21 pagesUH-1H Huey Radio and Navigation Equipment v. 1.0Guillermo WNo ratings yet
- VOR Made Simple: Understanding VOR NavigationDocument21 pagesVOR Made Simple: Understanding VOR NavigationEmmanuel Lucas TrobbianiNo ratings yet
- Q CodesDocument14 pagesQ CodesWIN MIN100% (1)
- Airport FrequenciesDocument12 pagesAirport FrequenciesElego13thNo ratings yet
- VOR NDB Numerical Test 1Document13 pagesVOR NDB Numerical Test 1sneha jauhariNo ratings yet
- Rule: Export Administration Regulations: Entity List— Entities Acting Contrary To National Security and Foreign Policy Interests of U.S. Export and Reexport License RequirementsDocument4 pagesRule: Export Administration Regulations: Entity List— Entities Acting Contrary To National Security and Foreign Policy Interests of U.S. Export and Reexport License RequirementsJustia.comNo ratings yet
- Q.Bank Air NavDocument14 pagesQ.Bank Air Navsakshee gojreNo ratings yet
- 737NG 09 FMS NavDocument9 pages737NG 09 FMS NavAriawan D RachmantoNo ratings yet
- YPDNDocument39 pagesYPDNSeyi WilliamsNo ratings yet
- Da Fcs Pilots Manual spz7000Document55 pagesDa Fcs Pilots Manual spz7000Shawn McCarville100% (1)
- CFP HKG-MNLDocument31 pagesCFP HKG-MNLTony WongNo ratings yet
- 2008 Federal Radionavigation PlanDocument184 pages2008 Federal Radionavigation PlanCarsten KappenbergerNo ratings yet
- VHF Omni-Range (VOR) : Chapter - 2Document26 pagesVHF Omni-Range (VOR) : Chapter - 2Chiranjivi KuthumiNo ratings yet
- Vor AntennaDocument82 pagesVor Antennacmge_2005100% (2)
- Isat 100 Opd Soi - R02 010Document33 pagesIsat 100 Opd Soi - R02 010874895No ratings yet