You might also like
- Delco Radio Owner's Manual Model 633; Delcotron Generator InstallationFrom EverandDelco Radio Owner's Manual Model 633; Delcotron Generator InstallationNo ratings yet
- How To Manually Tune A Three-Mode PID ControllerDocument5 pagesHow To Manually Tune A Three-Mode PID ControllerlorenzoNo ratings yet
- A Voltage Regulator Is Designed To Automatically Maintain A Constant Voltage LevelDocument3 pagesA Voltage Regulator Is Designed To Automatically Maintain A Constant Voltage LevelAhmad FadhliNo ratings yet
- Ea341 Manual enDocument6 pagesEa341 Manual enVishnu VardhanNo ratings yet
- Generator Automatic Voltage Regulator Operation ManualDocument6 pagesGenerator Automatic Voltage Regulator Operation ManualSabyasachi KarNo ratings yet
- Tarjeta VelocidadDocument9 pagesTarjeta Velocidaddiego100% (1)
- Using HC900 Accutune IIIDocument3 pagesUsing HC900 Accutune IIIthanh_cdt01No ratings yet
- Especificaciones Tecnicas AVR Stamford SX440Document4 pagesEspecificaciones Tecnicas AVR Stamford SX440MH..2023No ratings yet
- PIDControlDocument2 pagesPIDControlchatty8567% (3)
- Introduction To Turbine Governing SystemsDocument33 pagesIntroduction To Turbine Governing SystemsSam100% (1)
- Ses-12 TDPSDocument31 pagesSes-12 TDPSbaljeetjatNo ratings yet
- Detector Service ManualDocument4 pagesDetector Service Manualkhanh khanhNo ratings yet
- ESD5100 Series Speed Control UnitDocument2 pagesESD5100 Series Speed Control UnitJaimeCoelloNo ratings yet
- Esd5500E Series Speed Control Tlnit: WarningDocument5 pagesEsd5500E Series Speed Control Tlnit: WarningKarla HolandaNo ratings yet
- Avr - sx460 InstructionDocument4 pagesAvr - sx460 InstructionJavier CastroNo ratings yet
- Avr sr7Document5 pagesAvr sr7Ysabel Aliaga100% (2)
- Imprimindo - PID Tune Control PanelDocument7 pagesImprimindo - PID Tune Control PanelmarceloenderleNo ratings yet
- What Is PID-Tutorial Overview: Proportional Band Integral DerivativeDocument5 pagesWhat Is PID-Tutorial Overview: Proportional Band Integral Derivativethenu.chandru1042No ratings yet
- Technical Information Sheet: TIS#: 295 Date: March 27, 2009 Issued By: Mark Demick SubjectDocument5 pagesTechnical Information Sheet: TIS#: 295 Date: March 27, 2009 Issued By: Mark Demick SubjectradgorNo ratings yet
- Calibration and Control of Servo TrainerDocument14 pagesCalibration and Control of Servo Trainersyedhamdan45No ratings yet
- Governingsystem 131127063004 Phpapp01 PDFDocument38 pagesGoverningsystem 131127063004 Phpapp01 PDFhari setiawan100% (1)
- (Carr D.M.) PID Control and Controller Tuning TechDocument11 pages(Carr D.M.) PID Control and Controller Tuning Techfherrera_80972No ratings yet
- (Ebook) Pid Control and Controller Tuning TechniquesDocument11 pages(Ebook) Pid Control and Controller Tuning TechniquesMohamed SakrNo ratings yet
- Sx460 Automatic Voltage Regulator (Avr)Document4 pagesSx460 Automatic Voltage Regulator (Avr)rajan_2002eee100% (1)
- AVR341 Generator Automatic Voltage Regulator Operation ManualDocument6 pagesAVR341 Generator Automatic Voltage Regulator Operation ManualEmanuel Arguiñarena100% (1)
- AVC63-7 Voltage Regulator - Instructions - 9302800991-B - March 2012 - BASLER ELECTRIC PDFDocument4 pagesAVC63-7 Voltage Regulator - Instructions - 9302800991-B - March 2012 - BASLER ELECTRIC PDFpevareNo ratings yet
- 500mw Guidelines For House Load Operation 500mw SetsDocument6 pages500mw Guidelines For House Load Operation 500mw Setsthangarajm1984100% (1)
- PID Tuning TutorialDocument1 pagePID Tuning TutorialDan SomervilleNo ratings yet
- Warning: ESD5200 Series Speed Control UnitDocument6 pagesWarning: ESD5200 Series Speed Control UnitAnas BasarahNo ratings yet
- Mod 4 Book 3 Servo MechanismsDocument66 pagesMod 4 Book 3 Servo Mechanismsranjit prasadNo ratings yet
- Warning: ESD5500E Series Speed Control UnitDocument6 pagesWarning: ESD5500E Series Speed Control UnitLuis Alberto LopezNo ratings yet
- University of Benghazi: Department of Electrical and Electronics EngineeringDocument12 pagesUniversity of Benghazi: Department of Electrical and Electronics EngineeringAhmed AlhadarNo ratings yet
- EG3000 ManualDocument7 pagesEG3000 ManualJose Armando Perez AcostaNo ratings yet
- Ehtc JharliDocument38 pagesEhtc JharliRakesh Bagri100% (2)
- Grid Voltage Response TestingDocument4 pagesGrid Voltage Response TestingNarvin Raj ChandraNo ratings yet
- V. Other-Excitation Idle-Loaded Pressure Build-Up Test in The GeneratorDocument51 pagesV. Other-Excitation Idle-Loaded Pressure Build-Up Test in The GeneratorClip nhungcaunoihayNo ratings yet
- Applying Sensorless Vector ControlDocument6 pagesApplying Sensorless Vector Controlluis palaciosNo ratings yet
- ISOC Control GenreatorsDocument4 pagesISOC Control GenreatorsStuart Robinson100% (1)
- EA230 Manual Voltage RegulatorDocument4 pagesEA230 Manual Voltage Regulatorhenryvargas238565No ratings yet
- Unit 1: General Background and Speed GovernorsDocument14 pagesUnit 1: General Background and Speed GovernorsHartoyoNo ratings yet
- Ac Position Control Trainer ManualDocument7 pagesAc Position Control Trainer ManualSHANKARNo ratings yet
- Newage Sx460 Automatic Voltage RegulatorDocument5 pagesNewage Sx460 Automatic Voltage RegulatorLuis Alberto Lopez100% (1)
- Woodward 505eDocument23 pagesWoodward 505emkoelrealNo ratings yet
- Avr PM300Document6 pagesAvr PM300menale libayeNo ratings yet
- ESD5100 Series Speed Control UnitDocument2 pagesESD5100 Series Speed Control Unitajcapetillog100% (2)
- 110 CFM Compressor - VFD SettingsDocument17 pages110 CFM Compressor - VFD Settingssantosh reddy dundigalNo ratings yet
- Sa465 Automatic Voltage Regulator (Avr)Document4 pagesSa465 Automatic Voltage Regulator (Avr)KenNaNo ratings yet
- Turbine Governing System Commissioning & Troubleshooting MhepDocument6 pagesTurbine Governing System Commissioning & Troubleshooting MhepDileep VarmaNo ratings yet
- AGN 003 - Transient Performance and LockedDocument7 pagesAGN 003 - Transient Performance and LockedariwibowoNo ratings yet
- Basic Control Systems LabDocument10 pagesBasic Control Systems LabNut PamornNo ratings yet
- Chap 3Document10 pagesChap 3amol76No ratings yet
- ESD-5550/5570 Series - Speed Control Unit: Technical InformationDocument12 pagesESD-5550/5570 Series - Speed Control Unit: Technical InformationCarlos Molina100% (1)
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDocument5 pagesChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiNo ratings yet
- SE350 Voltage Regulator Instruction Manual: A Regal BrandDocument4 pagesSE350 Voltage Regulator Instruction Manual: A Regal BrandGustavo GrisalesNo ratings yet
- Servo Stabilizer ControllerDocument39 pagesServo Stabilizer Controllershalu29No ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- AWG To mm2Document1 pageAWG To mm2adelfawzy1234100% (1)
- sd090013 - BARRIERTA L 55 2 (GB)Document4 pagessd090013 - BARRIERTA L 55 2 (GB)adelfawzy1234No ratings yet
- Binder 1Document7 pagesBinder 1adelfawzy1234No ratings yet
- Sds Barrierta L 55 1 GB enDocument9 pagesSds Barrierta L 55 1 GB enadelfawzy1234No ratings yet
- Zug ENDocument4 pagesZug ENadelfawzy1234No ratings yet
- Cable Ties: FeaturesDocument3 pagesCable Ties: Featuresadelfawzy1234No ratings yet
- Mobilgrease 28Document3 pagesMobilgrease 28adelfawzy1234No ratings yet
- From Gen#1: SheetDocument1 pageFrom Gen#1: Sheetadelfawzy1234No ratings yet
- Hazardous Areas Classification and Equipment: InformationsDocument3 pagesHazardous Areas Classification and Equipment: Informationsadelfawzy1234No ratings yet
- Schneider Frequently Asked QuesDocument2 pagesSchneider Frequently Asked Quesadelfawzy1234No ratings yet
- Power Supply: SheetDocument1 pagePower Supply: Sheetadelfawzy1234No ratings yet
- Emergency Stop: SheetDocument1 pageEmergency Stop: Sheetadelfawzy1234No ratings yet
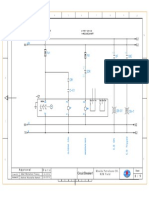
- Circuit Breaker1: SheetDocument1 pageCircuit Breaker1: Sheetadelfawzy1234No ratings yet
- WoodwardDocument32 pagesWoodwardadelfawzy1234No ratings yet
- From Generator: SynchronizingDocument1 pageFrom Generator: Synchronizingadelfawzy1234No ratings yet
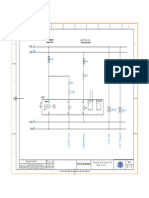
- Circuit Breaker2: SheetDocument1 pageCircuit Breaker2: Sheetadelfawzy1234No ratings yet