You might also like
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemNo ratings yet
- Cours - Guidage en Rotation - e PDFDocument4 pagesCours - Guidage en Rotation - e PDFTriki Bilel100% (2)
- TD 16 Corrigé - Liaisons - Schéma CinématiqueDocument5 pagesTD 16 Corrigé - Liaisons - Schéma Cinématiquelfadli67% (3)
- BE CoursDocument31 pagesBE CoursMoudi BouhlelNo ratings yet
- Chapitres 1 Les LiaisonsDocument15 pagesChapitres 1 Les LiaisonsmohchouNo ratings yet
- Exercices de Filetage - eDocument4 pagesExercices de Filetage - echrisNo ratings yet
- Construction MécaniqueDocument70 pagesConstruction MécaniqueMohamed EddriefNo ratings yet
- Devoir de Construction MécaniqueDocument1 pageDevoir de Construction MécaniqueIkram100% (1)
- Exo 5 Statique PerceuseDocument2 pagesExo 5 Statique PerceuseSamba Sall38% (8)
- TP 2 Les Liaisons Dans Les Mecanismes Partie 2 Exercice 1 Liaisons MecaniquesDocument13 pagesTP 2 Les Liaisons Dans Les Mecanismes Partie 2 Exercice 1 Liaisons MecaniquesezfNo ratings yet
- 04-Coupes Et Sections-RepDocument14 pages04-Coupes Et Sections-RepElmouden Mustapha100% (1)
- Cours Liaison HelicoidaleDocument12 pagesCours Liaison HelicoidaleMohamed Larbi100% (1)
- 8fap4-Bride HydrauliqueDocument2 pages8fap4-Bride HydrauliquemohsenNo ratings yet
- Recueil Travaux Dirigés Tech Const PDFDocument62 pagesRecueil Travaux Dirigés Tech Const PDFWafa Raboudi100% (6)
- Exercice Coupe Et Section Chappe Corrigé PDFDocument3 pagesExercice Coupe Et Section Chappe Corrigé PDFHoussam Haddani86% (7)
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Document6 pagesDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- Devoir de Controle N: Presse Manuelle À ŒilletsDocument4 pagesDevoir de Controle N: Presse Manuelle À ŒilletsAdel Kmimech100% (1)
- Cours Liaison EncastrementDocument7 pagesCours Liaison EncastrementBIOS_012100% (2)
- 4 - Roues de FrictionDocument8 pages4 - Roues de Frictionesloch100% (1)
- SciesauteusecorrectionDocument3 pagesSciesauteusecorrectionyumiNo ratings yet
- Le Dessin D'ensemble-EDocument4 pagesLe Dessin D'ensemble-EMido Si CherniNo ratings yet
- Fonction AssemblageDocument32 pagesFonction AssemblageyahyaouiNo ratings yet
- TD1 Schéma Ciné Casse ÉcrouDocument2 pagesTD1 Schéma Ciné Casse ÉcrouAlami El100% (3)
- Cours Guidage TranslationDocument12 pagesCours Guidage TranslationKali Abdennour0% (1)
- 32-Exercice Caractere LiaisonsDocument7 pages32-Exercice Caractere LiaisonsManal El Matmour M'hair100% (1)
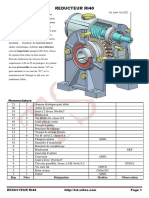
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDocument6 pagesREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- Chapitre 2 MODELISATION DES LIAISONSDocument15 pagesChapitre 2 MODELISATION DES LIAISONSChaker Chaoual100% (1)
- 13 9 TD - Transmission PDFDocument10 pages13 9 TD - Transmission PDFRanya ouherrouNo ratings yet
- Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MR BEN AMAR PDFDocument8 pagesDevoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MR BEN AMAR PDFArfaoui Aymen100% (2)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Caractères de LiaisonDocument5 pagesCaractères de LiaisonGuy Effa100% (1)
- Assemblages Par Elements FiletesDocument14 pagesAssemblages Par Elements Fileteselgheryb_choukri100% (1)
- 13 - Cours Cotation Fonctionnelle ET Exercices PDFDocument13 pages13 - Cours Cotation Fonctionnelle ET Exercices PDFmasteratsii100% (1)
- Exercice Cinmatique Trajectoires Essuie Glace CorrigDocument2 pagesExercice Cinmatique Trajectoires Essuie Glace Corrigspectrum66100% (1)
- Exercice - RDM - Cisaillement - Clavette Motorducteur - EnoncDocument4 pagesExercice - RDM - Cisaillement - Clavette Motorducteur - Enoncomar-benka-3821No ratings yet
- Cours Modelisation Des Liaisons eDocument8 pagesCours Modelisation Des Liaisons entayoub100% (1)
- Exercice Dessin Industriel PDFDocument2 pagesExercice Dessin Industriel PDFLance50% (2)
- 4-Le Vocabulaire Des Formes de PièceDocument5 pages4-Le Vocabulaire Des Formes de PièceSegaAlainCoulibalyNo ratings yet
- 9zx65-Devoir SN2 Avec CorrectionDocument11 pages9zx65-Devoir SN2 Avec CorrectionBouba RabebNo ratings yet
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaNo ratings yet
- Dessin A4Document63 pagesDessin A4Loic MfonzieNo ratings yet
- Ds1 1as 2022 Fin YoutubeDocument5 pagesDs1 1as 2022 Fin YoutubeAhmed Aloui100% (1)
- Liaison EncastrementDocument4 pagesLiaison EncastrementMeryemHmouri100% (1)
- CC1 - Octobre 2019-Touret - Meuler 2STE1Document4 pagesCC1 - Octobre 2019-Touret - Meuler 2STE1ESSOME ESSOME OLIVIER STEPHANE100% (1)
- Modelisation Des Liaisons: MécaniqueDocument15 pagesModelisation Des Liaisons: MécaniqueSimo StitNo ratings yet
- Détail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousDocument2 pagesDétail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousGhebouli SamirNo ratings yet
- Les AccouplementsDocument6 pagesLes Accouplementsjontipoul100% (2)
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.From EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.No ratings yet
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesFrom EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo ratings yet
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsFrom EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsNo ratings yet
- Chapitre 2 - Liaison Et Assemblage MécaniquesDocument11 pagesChapitre 2 - Liaison Et Assemblage MécaniquesFréjus abimbolaNo ratings yet
- TDM LiaisonsDocument22 pagesTDM LiaisonsKooraNow HDNo ratings yet
- Les Liaisons Mécaniques: Fiche Annexe UsuellesDocument1 pageLes Liaisons Mécaniques: Fiche Annexe UsuellesKarimNo ratings yet
- Liaisons Cours1 WWW - Tunisie-EtudesDocument15 pagesLiaisons Cours1 WWW - Tunisie-EtudesntayoubNo ratings yet
- Cours-Guidage Translation (1) PolycopiéDocument12 pagesCours-Guidage Translation (1) Polycopiéfatima zahra benmeriemeNo ratings yet
- Chapitre 1 PDFDocument7 pagesChapitre 1 PDFYasser NapoliNo ratings yet
- MODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Document10 pagesMODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Andreas NGASTE100% (1)
- 1 - TD13 Cinématique Schémas CinématiquesDocument6 pages1 - TD13 Cinématique Schémas CinématiquesCorentin ProdNo ratings yet
- Fiche Fonction DistributionDocument59 pagesFiche Fonction DistributionSmirnov ArtaéévNo ratings yet
- Anglais 1Document4 pagesAnglais 1Smirnov ArtaéévNo ratings yet
- Agence CihDocument2 pagesAgence CihSmirnov ArtaéévNo ratings yet
- 7 Protect & SignalisationDocument35 pages7 Protect & SignalisationSmirnov Artaéév100% (1)
- MaintenanceDocument7 pagesMaintenanceBechir ThlNo ratings yet
- 6 Interv Sur IncidentsDocument26 pages6 Interv Sur IncidentsSmirnov ArtaéévNo ratings yet
- Anglais 1Document4 pagesAnglais 1Smirnov ArtaéévNo ratings yet
- Transaction Divers TechnicommercialDocument32 pagesTransaction Divers TechnicommercialSmirnov ArtaéévNo ratings yet
- 26247Document205 pages26247Smirnov ArtaéévNo ratings yet
- C Partie5Document2 pagesC Partie5Smirnov ArtaéévNo ratings yet
- XK1472002FRC 001Document178 pagesXK1472002FRC 001Smirnov ArtaéévNo ratings yet
- 8 Guide D - InterventionDocument21 pages8 Guide D - InterventionSmirnov ArtaéévNo ratings yet
- Document Formation Poste HT - MTDocument48 pagesDocument Formation Poste HT - MTSmirnov Artaéév100% (2)
- C Partie3Document3 pagesC Partie3Smirnov ArtaéévNo ratings yet
- C Partie1Document4 pagesC Partie1Smirnov ArtaéévNo ratings yet
- 6-Repèrage AlphanumèriqueDocument12 pages6-Repèrage AlphanumèriqueSmirnov ArtaéévNo ratings yet
- Secteur SantéDocument104 pagesSecteur SantéSmirnov ArtaéévNo ratings yet
- Annonce Acces Crmef2015qualifiantDocument3 pagesAnnonce Acces Crmef2015qualifiantSmirnov ArtaéévNo ratings yet
- C Partie2Document2 pagesC Partie2Smirnov ArtaéévNo ratings yet
- Livre Blanc Evaluation PsychometriqueDocument40 pagesLivre Blanc Evaluation PsychometriqueSmirnov ArtaéévNo ratings yet
- Aide CANECO MulhouseDocument15 pagesAide CANECO MulhousemoezborchaniNo ratings yet
- 3 - Code ManoeuvresDocument49 pages3 - Code ManoeuvresSmirnov ArtaéévNo ratings yet
- 6 Interv Sur IncidentsDocument26 pages6 Interv Sur IncidentsSmirnov ArtaéévNo ratings yet
- FeuilletageDocument27 pagesFeuilletageSmirnov ArtaéévNo ratings yet
- 6 Interv Sur IncidentsDocument26 pages6 Interv Sur IncidentsSmirnov ArtaéévNo ratings yet
- Technologies MTDocument94 pagesTechnologies MTSmirnov Artaéév100% (1)
- 1 Technique de CoupureDocument63 pages1 Technique de CoupureSmirnov ArtaéévNo ratings yet
- Torsades de Reseau BTDocument2 pagesTorsades de Reseau BTSmirnov ArtaéévNo ratings yet
- Annexe IDocument1 pageAnnexe ISmirnov ArtaéévNo ratings yet
- Guide Explicatif CCE-2007 - Scetion 24 - Aires de SoinsDocument1 pageGuide Explicatif CCE-2007 - Scetion 24 - Aires de SoinsSmirnov Artaéév100% (1)
- Cours de La RDM - AbdelDocument60 pagesCours de La RDM - AbdelelkhayariNo ratings yet
- Conception D'une Machine de Po - Bouchra KHILOU - 4717Document42 pagesConception D'une Machine de Po - Bouchra KHILOU - 4717Adil EL AttarNo ratings yet
- SimDesigner - Notes de CoursDocument52 pagesSimDesigner - Notes de CoursNicolas NupsNo ratings yet
- CNC Si MP 2016 CGDocument14 pagesCNC Si MP 2016 CGMonsif monsifNo ratings yet
- 3cours de Fabrication Usinage Par Enlèvement de CopeauxDocument7 pages3cours de Fabrication Usinage Par Enlèvement de CopeauxEtienne BouronNo ratings yet
- TD 3 StatiqueDocument18 pagesTD 3 Statiquefoufoua100% (1)
- Représentation GraphiqueDocument7 pagesReprésentation GraphiquetaiebshowNo ratings yet
- (FS01) Intro Aux Liaisons Meca PDFDocument3 pages(FS01) Intro Aux Liaisons Meca PDFGuy YgalNo ratings yet
- Si Psi DR 2o2oDocument8 pagesSi Psi DR 2o2omalik saadounNo ratings yet
- Maroc Prog2013 Phys PcsiDocument24 pagesMaroc Prog2013 Phys PcsiUnes AmaskalNo ratings yet
- Sinus MaticDocument3 pagesSinus MaticAbdelali YacoubiNo ratings yet
- Synthese SUP MecaDocument21 pagesSynthese SUP MecaemyazNo ratings yet
- Chapitre 01Document16 pagesChapitre 01Dabou AbderaoufNo ratings yet
- Calcul Des Roulements 2Document11 pagesCalcul Des Roulements 2Amine MechNo ratings yet
- TD RoulementDocument6 pagesTD RoulementBouba RabebNo ratings yet
- Liaisons Et Assemblage de Pieces Mecaniques Guidage en TranslationDocument5 pagesLiaisons Et Assemblage de Pieces Mecaniques Guidage en TranslationBen Saber Rahiim100% (1)
- En 12385 3Document22 pagesEn 12385 3Mrr OulhamriNo ratings yet
- Chaine Dénergie Fonction Alimenter Fonction Distribuer Fonction Convertir Fonction Transmettre Et AgirDocument17 pagesChaine Dénergie Fonction Alimenter Fonction Distribuer Fonction Convertir Fonction Transmettre Et Agirba2007_2008100% (1)
- Curriculum 1 2an STMDocument49 pagesCurriculum 1 2an STMsinchicovich100% (1)
- La Borne RéglableDocument9 pagesLa Borne RéglableDjiendjieNo ratings yet
- Machines-Outils À Commande Numérique Structure, Modélisation Et RéglageDocument67 pagesMachines-Outils À Commande Numérique Structure, Modélisation Et RéglageMohamed El Hadi Redjaimia69% (16)
- Examen RDM 2019s2Document4 pagesExamen RDM 2019s2lamiabejaouiNo ratings yet
- TD Réducteur Inverseur de TreuilDocument2 pagesTD Réducteur Inverseur de Treuilevina nathanNo ratings yet
- Eliraoui KarimDocument33 pagesEliraoui KarimLahnine Ismail100% (1)
- Met T 13 TDDocument12 pagesMet T 13 TDAmani HamoudaNo ratings yet
- Adaptive Control of Scara RobotDocument82 pagesAdaptive Control of Scara Robotokacha0amraouy0% (1)
- Liaisons Mécaniques ModélisationDocument6 pagesLiaisons Mécaniques ModélisationRedelNo ratings yet
- Dictionnaire de La Reparation AutomobileDocument24 pagesDictionnaire de La Reparation AutomobileOlivier Houriez100% (1)
- Fasicule TP CAODocument125 pagesFasicule TP CAOLynda JerbiaNo ratings yet
- Ctions Mecaniques: Exercice 1: Solide Soumis A Deux GlisseursDocument20 pagesCtions Mecaniques: Exercice 1: Solide Soumis A Deux GlisseursM-zlle MalakNo ratings yet