You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Christo Lube MCG 134 Tech DataDocument1 pageChristo Lube MCG 134 Tech Datarobertoalfaro492023No ratings yet
- en Lock NutsDocument68 pagesen Lock NutsAlvaro Munoz100% (1)
- RC Chapter01 2016Document7 pagesRC Chapter01 2016Luna Latisya0% (1)
- Panelboard and Switchboard PDFDocument32 pagesPanelboard and Switchboard PDFGerardo M. James BravoNo ratings yet
- A Inspection ChecklistDocument90 pagesA Inspection Checklistsunny8704459100% (1)
- E52 Ca1dy 247682 PDFDocument34 pagesE52 Ca1dy 247682 PDFvũ văn đăngNo ratings yet
- SMITH SERVICE - Data Handbook PDFDocument608 pagesSMITH SERVICE - Data Handbook PDFvitcon87No ratings yet
- ECSCADA Presentation NRB 120816Document36 pagesECSCADA Presentation NRB 120816Mohit Sharma100% (1)
- Mazda 8 MPV LY3P - Workshop ManualDocument1,923 pagesMazda 8 MPV LY3P - Workshop ManualRoman88% (8)
- Skills Framework For Aerospace Skill Standard For Licensed Aircraft Maintenance Engineer - B1 (Mechanical)Document129 pagesSkills Framework For Aerospace Skill Standard For Licensed Aircraft Maintenance Engineer - B1 (Mechanical)Thupten Gedun Kelvin OngNo ratings yet
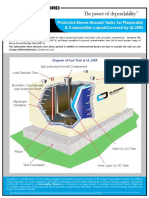
- UL2085Fuel TanksDocument2 pagesUL2085Fuel TanksShazmaniaNo ratings yet
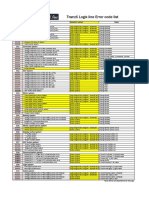
- Error Codes E-FLY M25Document1 pageError Codes E-FLY M25pavlik1No ratings yet
- Nammcesa 000014 PDFDocument3,732 pagesNammcesa 000014 PDFBasel Osama RaafatNo ratings yet
- Mechanics of Materials Chapter 1 SolutionsDocument7 pagesMechanics of Materials Chapter 1 SolutionsEvan YoungbergNo ratings yet
- 25 95sqmm 11 12kV HV Cable Connector Straight Connector 250 Amps ABB CSS A12250 02Document2 pages25 95sqmm 11 12kV HV Cable Connector Straight Connector 250 Amps ABB CSS A12250 02Hoang0% (1)
- House With SteelDocument8 pagesHouse With SteelMike LojoNo ratings yet
- Principle of PDTDocument9 pagesPrinciple of PDTJoseph OrjiNo ratings yet
- List of PlatesDocument13 pagesList of PlatesPSGNo ratings yet
- AICTE Approved Institutes Dec 19 2012Document789 pagesAICTE Approved Institutes Dec 19 2012dipakdks420No ratings yet
- A Project Report On: " Manufacturing of Concrete Pipes "Document8 pagesA Project Report On: " Manufacturing of Concrete Pipes "Adnan SyedNo ratings yet
- White Paper Gasoline BlendingDocument12 pagesWhite Paper Gasoline BlendingHeniNo ratings yet
- PK 24 - Bustos Transport Code Excerpts)Document56 pagesPK 24 - Bustos Transport Code Excerpts)fernan tadeoNo ratings yet
- Factors Affecting Selection of FoundationDocument4 pagesFactors Affecting Selection of FoundationRoy JariNo ratings yet
- Combustion Energy Flame Relay Ionization Flame Detector 600 Ifd 140 Srs Sil 2 Flame Relay Datasheet 02Document2 pagesCombustion Energy Flame Relay Ionization Flame Detector 600 Ifd 140 Srs Sil 2 Flame Relay Datasheet 02qaedmahmoodNo ratings yet
- SAMPLE Forklift Safety ProgramDocument5 pagesSAMPLE Forklift Safety ProgramSudiatmoko SupangkatNo ratings yet
- NR24A-SR Datasheet En-Gb PDFDocument3 pagesNR24A-SR Datasheet En-Gb PDFWagesusilo23121986_No ratings yet
- Mercer Valve 1400 Series BrochureDocument8 pagesMercer Valve 1400 Series BrochureAnonymous 7GuboLxjQNo ratings yet
- Mazda Protege 5 Control SystemDocument14 pagesMazda Protege 5 Control SystemJGAR2009No ratings yet
- Quality Metrics For Aerospace: Tim Robertson PQA Nasa/JplDocument20 pagesQuality Metrics For Aerospace: Tim Robertson PQA Nasa/Jplnikhil jNo ratings yet
- Technical Note 016 - Ground Bearing PRDocument3 pagesTechnical Note 016 - Ground Bearing PRAnonymous UebIaD8A8CNo ratings yet