You might also like
- Solutions Manual Communication Systems An Introduction Signals Noise in Electrical Communication 5th Edition Carlson PDFDocument23 pagesSolutions Manual Communication Systems An Introduction Signals Noise in Electrical Communication 5th Edition Carlson PDFdede ogag0% (3)
- Communication Systems Carlson Solution Manual PDFDocument2 pagesCommunication Systems Carlson Solution Manual PDFRonny29% (7)
- Feedback Control Systems Lab ManualDocument141 pagesFeedback Control Systems Lab Manualanum_sadaf0% (1)
- Exp2 Amplitude Modulation and Demodulation W2015Document12 pagesExp2 Amplitude Modulation and Demodulation W2015Bulmi Hilme100% (1)
- Circuits in MatlabDocument38 pagesCircuits in MatlabRana UsmanNo ratings yet
- Advanced Communication Lab ManualDocument69 pagesAdvanced Communication Lab Manualbhavanimaddula50% (4)
- FM Mod 2Document5 pagesFM Mod 2Aruna GiriNo ratings yet
- Tutorial Chapter 3 - AnsDocument2 pagesTutorial Chapter 3 - AnsMohd Äwiw Vießar Avondrah0% (1)
- ColpittsDocument8 pagesColpittsRavi Teja100% (1)
- CH 4 B P LathiDocument99 pagesCH 4 B P LathiHarsh LuharNo ratings yet
- EC2307-New Digital Communication Lab Manual Odd 2011Document53 pagesEC2307-New Digital Communication Lab Manual Odd 2011chenthiltrNo ratings yet
- MicrowaveDocument119 pagesMicrowaveAsif AfridiNo ratings yet
- Analog Communication Exam Paper T2Document7 pagesAnalog Communication Exam Paper T2DharmendraDixit100% (3)
- CH 4 FFT PDFDocument57 pagesCH 4 FFT PDFArundhati ChaudhariNo ratings yet
- When To Use System Objects Instead of MATLAB Functions: RandiDocument14 pagesWhen To Use System Objects Instead of MATLAB Functions: RandiDeko Gallegos AlegriaNo ratings yet
- LabSheet Experiments - Giatutinhyeu14 - 2Document176 pagesLabSheet Experiments - Giatutinhyeu14 - 2Nhi OtNo ratings yet
- Sampling, A/D and D/A Conversion Lab ReportDocument12 pagesSampling, A/D and D/A Conversion Lab ReportJoy BautistaNo ratings yet
- Circuit Analysis using Laplace Transform ExplainedDocument33 pagesCircuit Analysis using Laplace Transform ExplainedhafidahnsNo ratings yet
- Simulation of Bask, BPSK, BFSK Modulators Using VerilogDocument12 pagesSimulation of Bask, BPSK, BFSK Modulators Using VerilogJames MorenoNo ratings yet
- DPSK Modulation and DemodulationDocument7 pagesDPSK Modulation and Demodulationtaherakhans100% (1)
- JKKNCET-Digital Communication Laboratory-MATLAB ProgramsDocument23 pagesJKKNCET-Digital Communication Laboratory-MATLAB ProgramsJULIAN SAVARI ANTONY S100% (1)
- Q) Explain Effect of Negative and Diagonal ClippingDocument4 pagesQ) Explain Effect of Negative and Diagonal ClippingDivyanjaliNo ratings yet
- Analog Modulation TechniquesDocument66 pagesAnalog Modulation Techniquespawan33% (3)
- Creating An Inverter Layout Using L-EditDocument9 pagesCreating An Inverter Layout Using L-EditVinod MannNo ratings yet
- Simulation Lab - Student ManualDocument62 pagesSimulation Lab - Student Manualsubbu100% (1)
- CHAPTER 4 Noise ModDocument46 pagesCHAPTER 4 Noise ModGajanan BirajdarNo ratings yet
- Chapter 1 Line Code EncoderDocument27 pagesChapter 1 Line Code EncoderLim Denis ShinDonggeun0% (1)
- ADC 11 Digital ModulationDocument38 pagesADC 11 Digital ModulationMehboob KhokharNo ratings yet
- Operational AmplifierDocument130 pagesOperational Amplifierrs lagrimasNo ratings yet
- Logic Objectives ExamDocument5 pagesLogic Objectives ExamPeejay OllabracNo ratings yet
- Modern Electronic Communication 7th Edition by Beasley Miller MCQDocument38 pagesModern Electronic Communication 7th Edition by Beasley Miller MCQFranch Maverick Arellano LorillaNo ratings yet
- 9 Way Clap Switch!!Document8 pages9 Way Clap Switch!!Trilok Sawant100% (1)
- Lab6 Phase Locked LoopsDocument20 pagesLab6 Phase Locked Loopsuitce2011No ratings yet
- Exp2 (Study of AM Demodulation)Document4 pagesExp2 (Study of AM Demodulation)TA TiusNo ratings yet
- RF Communication Circuits S-ParametersDocument55 pagesRF Communication Circuits S-ParametersAnonymous U8awvgZ3pDNo ratings yet
- Chapter 16 PSK DemodDocument18 pagesChapter 16 PSK DemodberkahNo ratings yet
- NMOS - Inverter - PDF Version 1Document50 pagesNMOS - Inverter - PDF Version 1Al AminNo ratings yet
- Pulse Amplitude ModulationDocument86 pagesPulse Amplitude ModulationPraful Jagtap100% (1)
- MIT 6.341 Lecture 20 - The Goertzel Algorithm and Chirp TransformDocument4 pagesMIT 6.341 Lecture 20 - The Goertzel Algorithm and Chirp Transformc_mc2No ratings yet
- Electronic Devices and CircuitsDocument377 pagesElectronic Devices and CircuitsJermaine Strachan50% (2)
- Implementation and Bit Error Rate Analysis of BPSK Modulation and Demodulation Technique Using MATLABDocument5 pagesImplementation and Bit Error Rate Analysis of BPSK Modulation and Demodulation Technique Using MATLABseventhsensegroupNo ratings yet
- Digital Signal Processing ManualDocument106 pagesDigital Signal Processing Manual64emily64100% (1)
- Lab 4 Directional CouplerDocument10 pagesLab 4 Directional Couplernurin runNo ratings yet
- RF Design FundamentalsDocument46 pagesRF Design FundamentalsLong Lê VănNo ratings yet
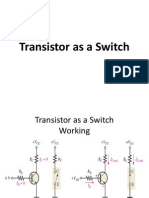
- Transistor As A SwitchDocument6 pagesTransistor As A SwitchMayank Agarwal100% (1)
- Analog To Digital ConverterDocument7 pagesAnalog To Digital ConverterRavi Patel100% (1)
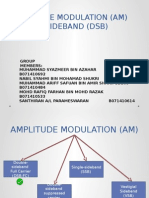
- Amplitude Modulation (Am)Document22 pagesAmplitude Modulation (Am)Nabil SyahmiNo ratings yet
- S ParametersDocument43 pagesS ParametersnagarjuncherukupalliNo ratings yet
- Signal GsDocument50 pagesSignal GsHowardNo ratings yet
- Chapter 2 - Part 1-Amplitude Modulation - v2Document50 pagesChapter 2 - Part 1-Amplitude Modulation - v2Vijay Papi Reddy AllamNo ratings yet
- Amplitude ModulationDocument117 pagesAmplitude ModulationRaghav ChaudharyNo ratings yet
- Practical MATLAB guide for Communication Systems lab sessionsDocument63 pagesPractical MATLAB guide for Communication Systems lab sessionsSreeraheem SkNo ratings yet
- Construction and verification of half/full adder using logic gatesDocument5 pagesConstruction and verification of half/full adder using logic gatesbcetonlineNo ratings yet
- SM ch02Document15 pagesSM ch02muzzammil17No ratings yet
- Certamen1 Solucion 2022Document5 pagesCertamen1 Solucion 2022Francisco AndrésNo ratings yet
- Fourier series solutionDocument4 pagesFourier series solutionHappy DeadNo ratings yet
- Fourier Transforms: Analog and Digital Communications Autumn 2005-2006Document16 pagesFourier Transforms: Analog and Digital Communications Autumn 2005-2006Rida AmjadNo ratings yet
- Ae2235 Exercises Lecture 2Document6 pagesAe2235 Exercises Lecture 2Sarieta SarrahNo ratings yet
- CH02 PDFDocument43 pagesCH02 PDFAwlia KhanNo ratings yet
- Hybrid Beamforming For DFRC System Based On SINR Performance MetricDocument6 pagesHybrid Beamforming For DFRC System Based On SINR Performance MetricRAVI SHANKAR JHANo ratings yet
- Temperature and Thermometers WorksheetDocument6 pagesTemperature and Thermometers WorksheetDen AloyaNo ratings yet
- Arksolv - 04-TR - SDS - ENDocument14 pagesArksolv - 04-TR - SDS - ENTimuçin ÇolakelNo ratings yet
- Determine The Magnitude of Statistical Variates at Some Future Point of TimeDocument1 pageDetermine The Magnitude of Statistical Variates at Some Future Point of TimeJulie Ann MalayNo ratings yet
- Geotechnic ReportDocument29 pagesGeotechnic ReportSolomon Mehari100% (1)
- GEC 7 Handout 1Document6 pagesGEC 7 Handout 1Nalo KunNo ratings yet
- Lesson 9 - Curvature and Refraction, Measuring Vertical DistancesDocument11 pagesLesson 9 - Curvature and Refraction, Measuring Vertical DistancesJohn Andrei PorrasNo ratings yet
- G16 - A21 - DAA 2723 WBPDocument16 pagesG16 - A21 - DAA 2723 WBPanazraf 23MzNo ratings yet
- Determine pressure and amount of air in gas tank problemsDocument3 pagesDetermine pressure and amount of air in gas tank problemsyeng botzNo ratings yet
- Department of Education: Republic of The PhilippinesDocument7 pagesDepartment of Education: Republic of The PhilippinesCristeta ToqueroNo ratings yet
- BerlitzDocument10 pagesBerlitzFrancis John Jaro BulaongNo ratings yet
- Building Thinking Skills® - Level 1Document10 pagesBuilding Thinking Skills® - Level 1NelaAlamos50% (8)
- Nathaniel Lichfield - Community Impact Evaluation - Principles and Practice-Routledge (1996)Document342 pagesNathaniel Lichfield - Community Impact Evaluation - Principles and Practice-Routledge (1996)Michael González VásquezNo ratings yet
- MGP Paranoia - Forms PackDocument61 pagesMGP Paranoia - Forms PackAurik FreyNo ratings yet
- 02070-GEN-PNG-SPE-004 - 04 Soportes PDFDocument234 pages02070-GEN-PNG-SPE-004 - 04 Soportes PDFJose C. MelendezNo ratings yet
- Self ReflectionDocument2 pagesSelf Reflectionapi-575370301No ratings yet
- Mt271 Lecture Notes 1Document13 pagesMt271 Lecture Notes 1Ahmed MasoudNo ratings yet
- SEO-optimized title for English exam documentDocument5 pagesSEO-optimized title for English exam documentAyu PermataNo ratings yet
- UntitledDocument3 pagesUntitledLynlyn ChuchuNo ratings yet
- There Is No A.I. - The New YorkerDocument8 pagesThere Is No A.I. - The New YorkerNoam NorkhatNo ratings yet
- Unit I - UV-vis Spectroscopy IDocument10 pagesUnit I - UV-vis Spectroscopy IKrishna Prasath S KNo ratings yet
- Transcription M3S2Document21 pagesTranscription M3S2GrowUP. AINo ratings yet
- CES 156-2015 ES-1996 Design of Masonry Structures - Part 1-1Document129 pagesCES 156-2015 ES-1996 Design of Masonry Structures - Part 1-1China AlemayehouNo ratings yet
- Study HabitsDocument2 pagesStudy HabitsJose CanciobelloNo ratings yet
- Indigo (The Search For True Understanding and Balance)Document197 pagesIndigo (The Search For True Understanding and Balance)Trunk Boolean100% (1)
- Challenges of Using Eclectic Approach for EFL BeginnersDocument12 pagesChallenges of Using Eclectic Approach for EFL BeginnersRahil MahNo ratings yet
- Checkpoint April 2016 Mathematics Paper 2Document16 pagesCheckpoint April 2016 Mathematics Paper 2Aditya Senthil100% (1)
- Questionnaire 1: Money From The Table While The Croupier Isn't Looking". Explain Einstein Quote inDocument3 pagesQuestionnaire 1: Money From The Table While The Croupier Isn't Looking". Explain Einstein Quote inTomislav PetrušijevićNo ratings yet
- A Building Sustainability Assessment System (BSAS) For Least DevDocument9 pagesA Building Sustainability Assessment System (BSAS) For Least DevGibidaws HapNo ratings yet
- Age and Gender With Mask ReportDocument15 pagesAge and Gender With Mask Reportsuryavamsi kakaraNo ratings yet