You might also like
- Single Line Diagram Definition and MeaningDocument7 pagesSingle Line Diagram Definition and MeaningMohammad HamamdNo ratings yet
- Electrical Cable Anatomy & MeasurementsDocument5 pagesElectrical Cable Anatomy & MeasurementsHermain Fayyaz KarimNo ratings yet
- Unsymmetrical Fault AnalysisDocument49 pagesUnsymmetrical Fault AnalysisabdulbabulNo ratings yet
- Chapter 1 - Introduction To Machinery PrinciplesDocument51 pagesChapter 1 - Introduction To Machinery PrinciplesGopinath SubramaniNo ratings yet
- Electro-Hydraulics: Prepared by Approved byDocument51 pagesElectro-Hydraulics: Prepared by Approved byPrakash KumarNo ratings yet
- 47-Wavelet Based Power Quality Disturbances Analysis of BLDC Motor Drive PDFDocument10 pages47-Wavelet Based Power Quality Disturbances Analysis of BLDC Motor Drive PDFveerannaNo ratings yet
- Oscillator PDFDocument4 pagesOscillator PDFJoshua DuffyNo ratings yet
- Emf Equation of AlternatorDocument2 pagesEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreNo ratings yet
- Polar & Nyquist Plots MCQDocument18 pagesPolar & Nyquist Plots MCQRajeev Singh BishtNo ratings yet
- Basic PLC Scada MCQDocument2 pagesBasic PLC Scada MCQjoshikaustubhp070No ratings yet
- Shreyash Bhimanwar 111907050 Entc Experiment No. 1 Characterization of RTDDocument49 pagesShreyash Bhimanwar 111907050 Entc Experiment No. 1 Characterization of RTDshreyash100% (1)
- Design and Implementation of Conveyor Belt Speed Control Using PID For Industrial ApplicationsDocument6 pagesDesign and Implementation of Conveyor Belt Speed Control Using PID For Industrial ApplicationsEditor IJTSRDNo ratings yet
- Evaluation of The Transient Response of A DC MotorDocument6 pagesEvaluation of The Transient Response of A DC MotorNesuh MalangNo ratings yet
- Applied Electronics Lab 1Document9 pagesApplied Electronics Lab 1Rickel RoweNo ratings yet
- Lecture Time Domain Analysis of Control SystemsDocument15 pagesLecture Time Domain Analysis of Control SystemsFahadKhNo ratings yet
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiNo ratings yet
- Nba C6Document23 pagesNba C6Satya NarayanaNo ratings yet
- M.tech ThesisDocument59 pagesM.tech ThesisRama Krishna100% (1)
- Lecture 14 Memory InterfaceDocument19 pagesLecture 14 Memory Interfacenjpar0% (2)
- Me2401 Mechatronics - 2 Marks With Answer PDFDocument15 pagesMe2401 Mechatronics - 2 Marks With Answer PDFSiva RamanNo ratings yet
- Speed Control of Universal Motor Using 1 Phase SemiconverterDocument2 pagesSpeed Control of Universal Motor Using 1 Phase SemiconverterscribsunilNo ratings yet
- ProtectionDocument43 pagesProtectiongeofrey fungoNo ratings yet
- CHAPTER 3 - Transducer and Sensors PDFDocument49 pagesCHAPTER 3 - Transducer and Sensors PDFROYALNEWSS100% (1)
- MCQs Question Bank Basic Electrical Engineering AKTUDocument13 pagesMCQs Question Bank Basic Electrical Engineering AKTURaj ChauhanNo ratings yet
- Control Systems and Instrumentation Lab GuideDocument3 pagesControl Systems and Instrumentation Lab GuideskrtamilNo ratings yet
- Design of Traffic Light Controller Using Timer CircuitDocument3 pagesDesign of Traffic Light Controller Using Timer CircuitVinooja cNo ratings yet
- Multiple Choice Questions DCM A SecDocument1 pageMultiple Choice Questions DCM A Seckanda71No ratings yet
- Lab # 01 To Study The Transient Response of RL Series Circuit MaterialsDocument4 pagesLab # 01 To Study The Transient Response of RL Series Circuit MaterialsYasir100% (1)
- K-Map Method for Logic MinimizationDocument57 pagesK-Map Method for Logic MinimizationHugh100% (1)
- Phase-Controlled AC-DC Converters TutorialDocument3 pagesPhase-Controlled AC-DC Converters TutorialChangyuFuNo ratings yet
- EXP2 Half Wave RectifierDocument3 pagesEXP2 Half Wave RectifierMohammed Dyhia Ali50% (2)
- Torque - Slip Characteristic of A Three - Phase Induction MachineDocument28 pagesTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirNo ratings yet
- Synchronous Machine Power and Torque CalculationDocument18 pagesSynchronous Machine Power and Torque CalculationUsama RaoNo ratings yet
- Power Electronics Important QuestionsDocument4 pagesPower Electronics Important QuestionsShuvamSarkar0% (1)
- Unit 1 INTRODUCTION TO MECHATRONICS SYSTEM DESIGNDocument8 pagesUnit 1 INTRODUCTION TO MECHATRONICS SYSTEM DESIGN9740177035100% (1)
- Jntua B.tech 4-1 Eee r15 SyllabusDocument26 pagesJntua B.tech 4-1 Eee r15 Syllabusaravind0% (1)
- Rectifier Circuit BasicsDocument26 pagesRectifier Circuit BasicsShiny SinghalNo ratings yet
- MTDC System PDFDocument17 pagesMTDC System PDFAshok Kumar67% (3)
- Interview Questions on State Variable AnalysisDocument33 pagesInterview Questions on State Variable AnalysisMainul BaikkaNo ratings yet
- Railway Track Crack Detection and Automated Gate ControlDocument53 pagesRailway Track Crack Detection and Automated Gate Controlkota naikNo ratings yet
- Scheme - I Sample Question PaperDocument4 pagesScheme - I Sample Question PaperYogesh ChaudhariNo ratings yet
- Embedded QuizDocument5 pagesEmbedded QuizJagan VNo ratings yet
- Control System Question BankDocument3 pagesControl System Question Bankmanish_iitrNo ratings yet
- SSSC PPT (Autosaved)Document14 pagesSSSC PPT (Autosaved)shubham bansalNo ratings yet
- Derivation of Gauge FactorDocument3 pagesDerivation of Gauge FactorSumit RathodNo ratings yet
- Digital Signal Processing AssignmentDocument5 pagesDigital Signal Processing AssignmentM Faizan FarooqNo ratings yet
- Laplace Transform ExamplesDocument19 pagesLaplace Transform Exampleshamza abdo mohamoudNo ratings yet
- Bode PlotDocument7 pagesBode Plotnabilo20No ratings yet
- Direct Energy Conversion Lecture I PDFDocument11 pagesDirect Energy Conversion Lecture I PDFAftab Ali Afridi33% (3)
- Digitally Controlled Buck Converter: Design and ImplementationDocument12 pagesDigitally Controlled Buck Converter: Design and ImplementationaaqibNo ratings yet
- Chapter 7 - Data Transmission and TelemetryDocument16 pagesChapter 7 - Data Transmission and Telemetryjst86No ratings yet
- Power Quality Lesson PlanDocument2 pagesPower Quality Lesson PlanAnonymous HyOfbJ6No ratings yet
- Unit-1:: Introduction To Basics of Industrial AutomationDocument23 pagesUnit-1:: Introduction To Basics of Industrial Automationanuj jain100% (1)
- Tutorial 1Document8 pagesTutorial 1Pradeep Kumar SahooNo ratings yet
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- Control System LabDocument37 pagesControl System LabSagarManjrekarNo ratings yet
- CS Lab ManualDocument28 pagesCS Lab Manualkcop111No ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Major Project Report On Home Automation SystemDocument6 pagesMajor Project Report On Home Automation Systemamit kumar0% (3)
- Senior Curriculum Vol 1 2012 FinalDocument361 pagesSenior Curriculum Vol 1 2012 Finald-fbuser-27550451No ratings yet
- RGTU Ex V Sem Question Papers by AMIT KUMARDocument54 pagesRGTU Ex V Sem Question Papers by AMIT KUMARamit kumarNo ratings yet
- NHDC Visit Report by Amit KumarDocument49 pagesNHDC Visit Report by Amit Kumaramit kumar67% (3)
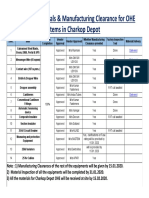
- Ae-02r1 Ohe2-1 PDFDocument1 pageAe-02r1 Ohe2-1 PDFAbhishek GuptaNo ratings yet
- Reactive Power Managment RPM BookletDocument72 pagesReactive Power Managment RPM BookletPramod B.WankhadeNo ratings yet
- IMA Batteries & ChargersDocument3 pagesIMA Batteries & Chargersdiegobc5No ratings yet
- 2019.2.25 UniGear ZS3. 2 Manual EN PDFDocument48 pages2019.2.25 UniGear ZS3. 2 Manual EN PDFDrago AndrijevicNo ratings yet
- UM Faculty of Science and Technology Lab Report: Measuring Efficiency and Waveforms of an Electric MachineDocument6 pagesUM Faculty of Science and Technology Lab Report: Measuring Efficiency and Waveforms of an Electric MachineJIayu ZhangNo ratings yet
- 128 Coudoint Sliding Rheostats DocumentationDocument20 pages128 Coudoint Sliding Rheostats DocumentationcrestindNo ratings yet
- BU-1-BU-2 CompleteDocument14 pagesBU-1-BU-2 CompleteKhiara May Fabula0% (1)
- DXX-1710-2690/1710-2690-65/65-18i/18i-M/M: Electrical PropertiesDocument2 pagesDXX-1710-2690/1710-2690-65/65-18i/18i-M/M: Electrical PropertiesBeto CostaNo ratings yet
- Optical Fiber Communication: Technical Seminar ONDocument13 pagesOptical Fiber Communication: Technical Seminar ONMadhu GaneshNo ratings yet
- Wuolah Free Exercises8Document7 pagesWuolah Free Exercises8Don José Antonio García-Trevijano ForteNo ratings yet
- Diodes Applications GuideDocument39 pagesDiodes Applications GuideKartika Munir100% (1)
- Motor StartingDocument24 pagesMotor Startingeng_mahmoud3000100% (1)
- ElectricalDocument10 pagesElectricalsivaeinfoNo ratings yet
- 1 Fuse-LinksDocument102 pages1 Fuse-LinksYoughorta TirNo ratings yet
- Vehical Control by Alcohol Detector: BY: DHRUV AGARWAL (12-EEU-014) HEEVAN SHER (12-EEU-020)Document24 pagesVehical Control by Alcohol Detector: BY: DHRUV AGARWAL (12-EEU-014) HEEVAN SHER (12-EEU-020)Anonymous ytZsBOVNo ratings yet
- Detection of Transformer Winding Displacement by FRSLDocument6 pagesDetection of Transformer Winding Displacement by FRSLKhushbu Thakur100% (2)
- 12 PhysicsDocument13 pages12 PhysicsSaaraNo ratings yet
- Manual Instalare INIM SmartLine PDFDocument72 pagesManual Instalare INIM SmartLine PDFcristytrs787878No ratings yet
- Saudi Aramco Test ReportDocument10 pagesSaudi Aramco Test Reportkarthi51289100% (1)
- Arc Flash and Electrical Safety HazardsDocument24 pagesArc Flash and Electrical Safety HazardsJulios Charl Panuncialman TagupaNo ratings yet
- Power HEMT Fabrication ProcessDocument24 pagesPower HEMT Fabrication ProcessVivek SuranaNo ratings yet
- Ass 2022Document4 pagesAss 2022gogajauharNo ratings yet
- Balawala Pump House: Bisalpur Jaipur Water Supply Project Daily Report - Pumping OperationDocument21 pagesBalawala Pump House: Bisalpur Jaipur Water Supply Project Daily Report - Pumping Operationlibin88No ratings yet
- Megger-MIT400 Manual PDFDocument39 pagesMegger-MIT400 Manual PDFRoad BlasterNo ratings yet
- Design and Fabrication of T Shirt Folding MachineDocument41 pagesDesign and Fabrication of T Shirt Folding MachineSubu ManiNo ratings yet
- Loco Breaker Test SystemDocument11 pagesLoco Breaker Test SystemtvjithinNo ratings yet
- Project InverterDocument67 pagesProject InverterKeshavGargNo ratings yet
- N2006 PidDocument8 pagesN2006 PidSarah KempNo ratings yet
- Electrical Thumb Rules for Motors, Transformers & MoreDocument4 pagesElectrical Thumb Rules for Motors, Transformers & MoreElectrical Radical100% (1)
- LOTO Manual For BeginnersDocument39 pagesLOTO Manual For Beginnersmarian_pruna8699100% (6)