You might also like
- Computers and Chemical Engineering: Optimal Design of Cryogenic Air Separation Columns Under UncertaintyDocument8 pagesComputers and Chemical Engineering: Optimal Design of Cryogenic Air Separation Columns Under UncertaintyMuhammad UsmanNo ratings yet
- Multi-Objective Optimization of An Industrial Crude Distillation Unit Using The Elitist Nondominated PDFDocument13 pagesMulti-Objective Optimization of An Industrial Crude Distillation Unit Using The Elitist Nondominated PDFBahar MeschiNo ratings yet
- Integrating CDU, FCC and Product Blending Models Into Refinery Planning PDFDocument19 pagesIntegrating CDU, FCC and Product Blending Models Into Refinery Planning PDFahmed1581973No ratings yet
- Earl Paper 5 - HollandDocument10 pagesEarl Paper 5 - HollandrvramanNo ratings yet
- Production-System Optimization of Gas Fields Using Hybrid Fuzzy/Genetic ApproachDocument9 pagesProduction-System Optimization of Gas Fields Using Hybrid Fuzzy/Genetic ApproachLimberg Tola MaytaNo ratings yet
- Simultaneous Synthesis of Heat Exchanger Networks With Operability Considerations: Flexibility and ControllabilityDocument52 pagesSimultaneous Synthesis of Heat Exchanger Networks With Operability Considerations: Flexibility and ControllabilityfransiscaNo ratings yet
- Building and Environment: Liang Zhou, Fariborz HaghighatDocument6 pagesBuilding and Environment: Liang Zhou, Fariborz HaghighatOmar ArdilaNo ratings yet
- An Index For Operational Flexibility in Chemical Process DesignDocument10 pagesAn Index For Operational Flexibility in Chemical Process Designmauricio colomboNo ratings yet
- Strategy Gas TransmDocument15 pagesStrategy Gas TransmPGPNo ratings yet
- A Strategic Planning... IRAN e USA - Kabirian e Hemmati PDFDocument15 pagesA Strategic Planning... IRAN e USA - Kabirian e Hemmati PDFmarcianunesmcgnsNo ratings yet
- New Lot-Sizing Formulations For Less Nervous Production SchedulesDocument21 pagesNew Lot-Sizing Formulations For Less Nervous Production Schedulespkj009No ratings yet
- (IJETA-V8I2P4) :MR J NarenDocument7 pages(IJETA-V8I2P4) :MR J NarenIJETA - EighthSenseGroupNo ratings yet
- OfficeBuildingswithOCC Final CleanDocument38 pagesOfficeBuildingswithOCC Final CleanZakiah Darajat NurfajrinNo ratings yet
- Optimization of A Petroleum Fractional Distillation Column Using Distop Calibration and Statistical MethodsDocument17 pagesOptimization of A Petroleum Fractional Distillation Column Using Distop Calibration and Statistical MethodsNguyễn Bá Hoàng NhânNo ratings yet
- Journal of Cleaner ProductionDocument14 pagesJournal of Cleaner ProductionAdeola AshiruNo ratings yet
- Design and Implementation of An Intelligent Fuzzy Logic Controller (FLC) For Air Handling Unit (AHU) For Smart HouseDocument12 pagesDesign and Implementation of An Intelligent Fuzzy Logic Controller (FLC) For Air Handling Unit (AHU) For Smart HouseMilosav Pusonjic MikiNo ratings yet
- Applied Sciences: A Review On Applications of Fuzzy Logic Control For Refrigeration SystemsDocument20 pagesApplied Sciences: A Review On Applications of Fuzzy Logic Control For Refrigeration SystemsHazemNo ratings yet
- Computers & Industrial Engineering: Seon Jin Kim, Gino J. Lim, Jaeyoung ChoDocument12 pagesComputers & Industrial Engineering: Seon Jin Kim, Gino J. Lim, Jaeyoung ChojuanNo ratings yet
- 1 s2.0 S2095268614001700 MainDocument6 pages1 s2.0 S2095268614001700 MainBhaswati MondalNo ratings yet
- Optimal Design and Operation of Batch ReactorsDocument16 pagesOptimal Design and Operation of Batch ReactorsMohamed Tarek KamarNo ratings yet
- Energies: A Holistic Review On Biomass Gasification Modified Equilibrium ModelsDocument31 pagesEnergies: A Holistic Review On Biomass Gasification Modified Equilibrium Modelsalaa haithamNo ratings yet
- Lillie 2015Document11 pagesLillie 2015syllalily1No ratings yet
- Modelos de Caja NegraDocument10 pagesModelos de Caja NegraGabriela Castañeda MirandaNo ratings yet
- Systemic Literature ReviewDocument19 pagesSystemic Literature Reviewkayshafloren4No ratings yet
- Franschescini e Macchieto 2007Document13 pagesFranschescini e Macchieto 2007André Luís AlbertonNo ratings yet
- Review of Markov Models For Maintenance Optimization in The Context of Offshore WindDocument11 pagesReview of Markov Models For Maintenance Optimization in The Context of Offshore WindWesam WesamNo ratings yet
- 1540-Manuscript With Authors Details-18219-1-10-20210606Document11 pages1540-Manuscript With Authors Details-18219-1-10-20210606Gerard Antonini DumaNo ratings yet
- Tezis EngDocument12 pagesTezis EngiazcuzcNo ratings yet
- Gero Giorgi S 2006Document6 pagesGero Giorgi S 2006RihamNo ratings yet
- DWC Column SimulationDocument14 pagesDWC Column SimulationFatih FıratNo ratings yet
- Artificial Intelligence For Solid Oxide Fuel CellsDocument13 pagesArtificial Intelligence For Solid Oxide Fuel Cellsmuhammet zahit bakışNo ratings yet
- Membrane System Design For Multicomponent Gas Mixtures Via MINLP (Qi and Henson) - 00Document19 pagesMembrane System Design For Multicomponent Gas Mixtures Via MINLP (Qi and Henson) - 00Bima SetyaputraNo ratings yet
- Varios Controladores 2Document20 pagesVarios Controladores 2gustavoarins1612No ratings yet
- OTC-26754-MS Role of Flow AssuranceDocument16 pagesOTC-26754-MS Role of Flow AssuranceMahfoud AMMOURNo ratings yet
- Genetic Algorithms Applied To Nuclear Reactor Design OptimizationDocument2 pagesGenetic Algorithms Applied To Nuclear Reactor Design Optimizationmppatilmayur1679No ratings yet
- ASHRAE Symposium AC-02!9!1 Electric Chiller Model-HydemanDocument9 pagesASHRAE Symposium AC-02!9!1 Electric Chiller Model-HydemanrickliberaliNo ratings yet
- An Optimal Control Strategy For Complex Building Central Chilled Water Systems For Practical and Real-Time ApplicationsDocument11 pagesAn Optimal Control Strategy For Complex Building Central Chilled Water Systems For Practical and Real-Time ApplicationssaruthanNo ratings yet
- Energy analysis of a UK textile mill using real-time energy dataDocument9 pagesEnergy analysis of a UK textile mill using real-time energy dataMilind KshirsagarNo ratings yet
- Analysis of Injection Moulding Machine ProcessDocument4 pagesAnalysis of Injection Moulding Machine ProcessJagdish KhaireNo ratings yet
- DA in Air Separation UnitDocument13 pagesDA in Air Separation UnitRADHESHYAMNo ratings yet
- Compressed Air Systems: Factors Affecting The Adoption of Measures For Improved EfficiencyDocument10 pagesCompressed Air Systems: Factors Affecting The Adoption of Measures For Improved EfficiencyHenry BarriosNo ratings yet
- Centrifugal Pellet DryerDocument12 pagesCentrifugal Pellet DryerMadiha ZaimuriNo ratings yet
- Energy Production Systems PDFDocument4 pagesEnergy Production Systems PDFAlexandru BacoșcăNo ratings yet
- Proceedings of the World Congress on Engineering and Computer Science 2019Document6 pagesProceedings of the World Congress on Engineering and Computer Science 2019Purushottam SethyNo ratings yet
- An Approach For Condition-Based MaintenanceDocument8 pagesAn Approach For Condition-Based MaintenanceMArceloNo ratings yet
- Aerospace: Application of An Efficient Gradient-Based Optimization Strategy For Aircraft Wing StructuresDocument27 pagesAerospace: Application of An Efficient Gradient-Based Optimization Strategy For Aircraft Wing StructuresMohsen ManounNo ratings yet
- Energies: Model Predictive Control Optimization Via Genetic Algorithm Using A Detailed Building Energy ModelDocument18 pagesEnergies: Model Predictive Control Optimization Via Genetic Algorithm Using A Detailed Building Energy ModelNors NoorNo ratings yet
- Chen 2014Document11 pagesChen 2014hosseinNo ratings yet
- Heating and Air Conditioning Design Approaches for BuildingsDocument7 pagesHeating and Air Conditioning Design Approaches for BuildingsemmanuelNo ratings yet
- Model predictive control optimizes cement kiln temperaturesDocument9 pagesModel predictive control optimizes cement kiln temperaturesJohn GiannakopoulosNo ratings yet
- 1 s2.0 S2211467X22000955 MainDocument13 pages1 s2.0 S2211467X22000955 Mainjun luNo ratings yet
- Review of Related LiteratureDocument3 pagesReview of Related LiteratureSpencer DariusNo ratings yet
- Energy Management & Audit 2Document40 pagesEnergy Management & Audit 2Avinaba BanerjeeNo ratings yet
- A Two-Stageschedulingmethodforhotrollinganditsapplication PDFDocument13 pagesA Two-Stageschedulingmethodforhotrollinganditsapplication PDFMohammedNo ratings yet
- Simulation Algorithm For The Integration of Solar and Farming Systems On Tropical FaçadesDocument10 pagesSimulation Algorithm For The Integration of Solar and Farming Systems On Tropical FaçadesThong Diep TruongNo ratings yet
- Isdb ProposalDocument74 pagesIsdb Proposaloleolo ibrahimNo ratings yet
- An Integrated Hierarchical Production and Maintenance-Planning ModelDocument16 pagesAn Integrated Hierarchical Production and Maintenance-Planning ModelAgatNo ratings yet
- Study On The Technical and Economic Viability in The Use of VRF Systems in - Conditioning EnvironmentsDocument12 pagesStudy On The Technical and Economic Viability in The Use of VRF Systems in - Conditioning EnvironmentsandreNo ratings yet
- Integrated Building Performance Simulation: J A Clarke ESRU, University of Strathclyde Joe@esru - Strath.ac - UkDocument10 pagesIntegrated Building Performance Simulation: J A Clarke ESRU, University of Strathclyde Joe@esru - Strath.ac - UkLTE002No ratings yet
- Energy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyFrom EverandEnergy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyChristine JuniorNo ratings yet
- Pic24fj256ga705 Family Data Sheet Ds30010118eDocument424 pagesPic24fj256ga705 Family Data Sheet Ds30010118eD GzHzNo ratings yet
- 21734Document67 pages21734Jeef100% (4)
- Naval Noise Psycho-Acoustic Backpropagation NNDocument12 pagesNaval Noise Psycho-Acoustic Backpropagation NNSilvia FlorentinaNo ratings yet
- Introduction: Use Chapter 2 Section 2 in Your Flexbook To Define The FollowingDocument5 pagesIntroduction: Use Chapter 2 Section 2 in Your Flexbook To Define The FollowingNathalieNo ratings yet
- Rom BlonDocument8 pagesRom BlonCharlesJustin AyunonNo ratings yet
- 066 LW Tensile Tester v2.0 PDFDocument4 pages066 LW Tensile Tester v2.0 PDFMarkusNo ratings yet
- Sri Lanka's Mineral Resources Can Enrich Country's CoffersDocument139 pagesSri Lanka's Mineral Resources Can Enrich Country's CoffersPrashan Francis100% (3)
- D-Glucitol (420i) Dextrose MonohydrateDocument3 pagesD-Glucitol (420i) Dextrose MonohydrateSilvia Melendez HNo ratings yet
- Diversification in Flavoured Milk: A ReviewDocument6 pagesDiversification in Flavoured Milk: A ReviewInternational Journal of Clinical and Biomedical Research (IJCBR)No ratings yet
- Reviewer On Nervous System Grade VIDocument4 pagesReviewer On Nervous System Grade VIKent Francis LayaguinNo ratings yet
- 74HCT259D 8-Bit Addressable Latch DATA SHEETDocument11 pages74HCT259D 8-Bit Addressable Latch DATA SHEETMarc BengtssonNo ratings yet
- June 2023 BillingDocument10 pagesJune 2023 BillingEsther AkpanNo ratings yet
- The War Archives - Machinery of Conflict. British Military Trucks of WWIIDocument84 pagesThe War Archives - Machinery of Conflict. British Military Trucks of WWIISebastijan Kerše100% (10)
- CHM4943 Wastewater TreatmentDocument7 pagesCHM4943 Wastewater TreatmentUsman GhaniNo ratings yet
- PWC Verbal Past Question and Answer 1Document130 pagesPWC Verbal Past Question and Answer 1Anton PermanaNo ratings yet
- Comparing characteristics and properties of various crude oilsDocument2 pagesComparing characteristics and properties of various crude oilsnishant bhushanNo ratings yet
- Op-Amp Comparator: Astable (Or Free-Running) Multivibrators Monostable MultivibratorsDocument5 pagesOp-Amp Comparator: Astable (Or Free-Running) Multivibrators Monostable MultivibratorsYuvaraj ShanNo ratings yet
- Overview of US Investment in NanotechnologyDocument19 pagesOverview of US Investment in NanotechnologyMaterials Research InstituteNo ratings yet
- Sea Cucumber PDFDocument171 pagesSea Cucumber PDFRebeccaSulivanNo ratings yet
- Wattgate 381 Audio Grade Duplex Socket - y CableDocument20 pagesWattgate 381 Audio Grade Duplex Socket - y Cableapi-11530725100% (1)
- GRT9165 Product GuideDocument23 pagesGRT9165 Product GuideEslamAldenAbdoNo ratings yet
- Tajima Usb Linker User's GuideDocument35 pagesTajima Usb Linker User's GuideFermin MuñozNo ratings yet
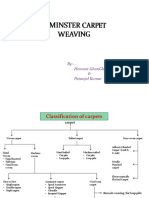
- Axminster CarpetDocument19 pagesAxminster Carpetrohit sinhaNo ratings yet
- Tests On Cement: IS: 4031 Part 4 1988 (Indian Standards)Document1 pageTests On Cement: IS: 4031 Part 4 1988 (Indian Standards)Lorna BacligNo ratings yet
- Connorized Classical CatalogDocument37 pagesConnorized Classical CatalogPablo Olea RodríguezNo ratings yet
- Chapter 6 Exercises (Bonds & Interest)Document2 pagesChapter 6 Exercises (Bonds & Interest)Shaheera SuhaimiNo ratings yet
- SoalDocument2 pagesSoalmaria_diyah4312No ratings yet
- Satellite Communication Uplink Transmitter Downlink Receiver and TransponderDocument2 pagesSatellite Communication Uplink Transmitter Downlink Receiver and TransponderTHONTARADYA CHANNELNo ratings yet
- Eko 75 Spare Part ListDocument23 pagesEko 75 Spare Part ListРустам Хайретдинов100% (1)
- EM 385-1-1 Chapters 20-26Document179 pagesEM 385-1-1 Chapters 20-26MusabNo ratings yet