Professional Documents
Culture Documents
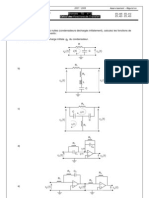
Cour Regulation Industrielle
Uploaded by
Youssef ElbarrahCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Cour Regulation Industrielle
Uploaded by
Youssef ElbarrahCopyright:
Available Formats
Cours Rgulation Industrielle
Par S. DOUBABI
1
Chapitre1 : Introduction la rgulation
industrielle
1- Quest-ce que la rgulation industrielle ?
Cest lensemble des techniques utilises visant contrler une grandeur
physique de telle sorte que celle-ci garde constamment sa valeur ou reste proche
de la valeur dsire, quelles que soient les perturbations qui peuvent subvenir.
Pour rguler un systme physique, il faut obligatoirement les trois oprations
fondamentales suivantes :
i- Mesure : mesurer la grandeur rgle avec un capteur/transmetteur.
ii- Dcision : en se basant sur la mesure, le rgulateur doit laborer le
signal de commande qui permet de maintenir la grandeur rgle la
valeur dsire.
iii- Action : suite la dcision du rgulateur, lactionneur agit sur la
grandeur rgle.
Exemple : Rgulation de niveau deau dans un rservoir
Figure 1.1 : Schma de principe dune rgulation de niveau
Rgulateur
Consigne
(niveau rfrence)
Niveau mesur
Commande
eau
Actionneur
Capteur de
niveau
Rservoir
Grandeur
rgule
(niveau deau)
Perte
Cours Rgulation Industrielle
Par S. DOUBABI
2
On peut reprsenter une rgulation sous forme de schma bloc de la manire
suivante :
Figure 1.2 : Schma bloc dune boucle de rgulation
2- Rgulation et asservissement
Dans une rgulation, on sattachera limiter les variations de la grandeur rgle
autour dune consigne constante lorsque le systme est soumis des
perturbations.
Pour dautre systmes, la perturbation la plus importante est la consigne elle
mme. En effet, la consigne peut varier en fonction du temps et par consquent
la grandeur rgle doit suivre les variations de la consigne. On parle, dans ce
cas, dun asservissement.
3- Transmission
Deux types de transmission analogique sont couramment utiliss pour la
communication entre les diffrents instruments des systmes de rgulation
industrielle.
Transmission pneumatique : utilise dans les industries ptrolires,
ptrochimiques, sidrurgiques
Le signal pneumatique est une pression analogique (air comprim).
Le transmetteur convertit la grandeur mesure (pression, dbit, niveau)
en un signal analogique pneumatique normalis, variable de 200 1000
millibars (mb) soit 3-15 psi.
La reprsentation courante de cette transmission dans le schma de
procd et dinstrumentation (Process and Instrument Diagram, P&ID)
est un trait continu barr comme indiqu sur la figure 1.4.
Figure 1.4 : Schma dune transmission pneumatique
transducteuur Rgulateur Actionneur Procd
Capteur /transmetteur
Consigne
Ecart
Commande
u
Grandeur
mesure
+
-
Grandeur
rgle
Perturbation
Cours Rgulation Industrielle
Par S. DOUBABI
3
Transmission lectrique : le signal lectrique utilis est une intensit ( ou
une tension) analogique normalise. Plusieurs chelles sont employes :
intensit : 4-20 mA ; 10-50 mA,
tension : 0-10V ; 1-11V ; 2.5-12.5V.
Le signal intensit, dchelle 4-20mA, est le plus souvent admis comme
normalise. La reprsentation courante de la transmission lectrique, dans
les P&ID, est une ligne en pointill comme il est reprsent sur la figure
suivante :
.
Figure 1.5 : Schma dune transmission lectrique
Transmission numrique : En numrique, les signaux sont cods en
binaire sur 8, 16, 32 ou 64 bits en liaison srie ou parallle. La
reprsentation courante de la transmission numrique, dans les P&ID,
est un trait discontinu.
---------------------
Figure 1.6 : Schma dune transmission numrique
Souvent, il est ncessaire de faire une transformation du signal intensit en un
signal pneumatique. A cet effet, on utilise un transducteur qui permet de
convertir le signal lectrique normalis en un signal pneumatique normalis.
4- Schma de procd et dinstrumentation
Dans le schma de procds et dinstrumentation (P&ID), les instruments
utiliss sont reprsents par des cercles entourant des lettres dfinissant la
grandeur physique rgle et leurs fonctions. La premire lettre dfinie la
grandeur physique rgle, les suivants la fonction des instruments. Un nombre
indiquant le numro de la boucle peut sajouter lintrieur du cercle.
Exemple :
Transmetteur de pression
PT
Pression
Transmetteur
Cours Rgulation Industrielle
Par S. DOUBABI
4
Transmetteur de niveau
Transmetteur de dbit
Indicateur de temprature
Rgulateur Indicateur de pression
Rgulateur Indicateur de niveau
Rgulateur Indicateur de dbit
Rgulateur Indicateur de temprature
Signification de quelques lettres :
1
re
lettre Lettres suivantes
A Analyse Alarme
C Conductivit Rgulation (Control)
E Tension Elment primaire
F Dbit (Flow rate) -
I Courant Indication
J Puissance -
L Niveau (Level) Lumire (Light or Low)
P Pression -
S Vitesse (Speed) Commutateur (Switch)
T Temprature Transmetteur
V Viscosit Vanne (Valve)
Pression
PIC
10
Rgulateur
Numro de la boucle
Indicateur
FT
TI
LT
LIC
FIC
TIC
Cours Rgulation Industrielle
Par S. DOUBABI
5
Exemple : Rgulation de niveau
Reprenons le schma de la figure 1.2. Ce schma devient en utilisant le schma
de procd et dinstrumentation (P&ID) :
Figure 1.7 : Schma de procd et dinstrumentation dune rgulation de niveau
deau dans un rservoir
Vanne de rgulation avec positionneur lectro-pneumatique.
Pompe centrifuge.
5- Rgulateurs
Un rgulateur est un organe qui reoit la valeur dune grandeur mesure partir
dun transmetteur sous forme de signal pneumatique ou lectronique standard, le
compare avec une consigne et gnre un signal derreur, puis calcule et transmet
un signal de commande fonction de lerreur un actionneur (vanne par exemple)
qui agit sur le procd dans le sens de la rduction du signal derreur. La
fonction derreur peut tre simple ou obir un algorithme mathmatique
complexe.
h
LIC
1
LT
1
Qe
Qs
hd
Cours Rgulation Industrielle
Par S. DOUBABI
6
5.1- Classification des rgulateurs
Les rgulateurs sont classs selon la nature de lnergie quils utilisent :
a- Pneumatique
Ils sont utiliss dans lindustrie chimique du gaz, ne prsentent pas de danger
dexplosion, de moins en mois utiliss car lents et encombrants, mais le poids du
pass est important car beaucoup dinstallations sont encore en pneumatique.
Sortie : 0,2 1 bar (3 15 psi).
b- Electronique
Ils utilisent des signaux analogiques base damplificateurs oprationnels.
Sortie : 4 20 mA.
c- Numrique
Actuellement, la plupart des rgulateurs sont implants dans les systmes de
conduite sous forme numrique, c'est--dire que la sortie du rgulateur est
calcule chaque cycle de traitement en fonction de la consigne et de la mesure.
La technologie numrique permet davoir une grande souplesse : opration
arithmtique, auto ajustement des coefficients, possibilit dmettre ou de
recevoir des donnes.
Le PID reste le rgulateur le plus utilis et le mieux connu, et bien quimplant
sous forme numrique et avec de nombreuses amliorations, il se prsente
lutilisateur sous une forme trs proche de la version initiale continue.
5.2 Aspects fonctionnels des rgulateurs PID
A- Action proportionnelle
Laction proportionnelle consiste gnrer une action qui varie de faon
proportionnelle au signal derreur :
u(t) = u
0
+ K
c
e(t) = u
0
+ K
c
(y
c
(t) y(t))
o : u(t) est la sortie du contrleur,
u0 est une valeur doffset,
Kc est le gain du contrleur,
yc(t) est la consigne,
y(t) est la mesure de la variable rguler.
La valeur de u0 peut tre ajuste. Puisque u=u0 lorsque e=0, elle correspond la
valeur nominale de laction autour du point de fonctionnement. Dans
limplantation pratique, u0 est mesure en % (de mme que u). Sa valeur par
dfaut est fixe gnralement 50%.
Le gain Kc est ajustable.
Cours Rgulation Industrielle
Par S. DOUBABI
7
La fonction de transfert dun rgulateur proportionnel est C(s) =
c
K
E(s)
U(s)
.
Un inconvnient inhrent au rgulateur P est son incapacit liminer les
erreurs en rgime permanent, aprs un changement de point de consigne ou une
variation de charge.
B- Action Intgrale et Proportionnelle Intgrale
Lintrt du rgulateur intgral est quil permet dliminer lerreur de rgulation
qui persistait avec un rgulateur proportionnel seul.
Le rgulateur intgral est rarement utilis seul, on lutilise avec un rgulateur
proportionnel.
La sortie dun rgulateur PI est de la forme :
u(t) = u
0
+ K
c
(e(t) + )d e(
T
1 t
0
i
)
La fonction de transfert du PI est :
C(s) = )
s
i
T
1
(1
c
K
E(s)
U(s)
.
Problme de saturation de lintgrale
Un des problmes du rgulateur PI est le phnomne appel saturation de
lintgrale (reset-windup en anglais). Celui-ci se produit lorsque la sortie du
rgulateur atteint une limite physique de lactionneur.
C- Action proportionnelle Drive
Lobjectif de laction drive est danticiper les variations venir du signal de
mesure en appliquant une correction proportionnelle sa vitesse de variation.
La sortie dun rgulateur PD idal est de la forme :
u(t) = u
0
+ K
p
(e(t) +
dt
de(t)
T
d
)
o la constante T
d
est appele temps de drive.
La fonction de transfert du PD est :
C(s) =
s) T (1
p
K
E(s)
U(s)
d
.
En pratique, il nest pas possible de raliser un rgulateur PD idal. On utilise en
fait un module de drive filtre :
Cours Rgulation Industrielle
Par S. DOUBABI
8
C(s) =
)
T
1
s T
(1
p
K
E(s)
U(s)
d
d
s
N
.
Le rglage de la constante de filtrage T
d
/N permet damortir et de limiter la
sortie du rgulateur. Le coefficient N (5<N<100) correspond au gain du module
drive filtre. En dautres termes, le bruit de mesure ou les changements de
consigne sont amplifis au plus par un coefficient N.
t
0
t
0
T
d
s
1
t t
t
0
t
0
1
t t
s
N
d
d
T
1
s T
N
Cours Rgulation Industrielle
Par S. DOUBABI
9
D- Action proportionnelle Intgrale Drive
Les rgulateurs rencontrs sur les installations industrielles combinent les effets
P, I et D. La sortie dun rgulateur PID mixte standard, avec filtrage de la
drive calcule sur lcart, est donc de la forme :
u(t) = u
0
+ K
p
(e(t) + )d e(
T
1
t
0
i
+T
d
D(t))
avec
dt
de(t)
D(t)
dt
dD(t)
N
T
d
.
La fonction de transfert du PID standard est :
C(s) =
)
T
1
s T 1
(1
p
K
E(s)
U(s)
d
d
s
N
s T
i
.
Leffet driv est destin acclrer la rponse du rgulateur. Cette
acclration nest en gnral pas souhaite lors des changements de consigne,
mais seulement pour corriger une erreur due une perturbation. Cest pour cette
raison quil est souvent possible dutiliser une drive sur la mesure seule plutt
que sur lerreur de rgulation. Leffet drive nexiste donc que lorsque la
mesure y(t) varie (perturbation) et non lorsque la consigne varie (changement de
point de consigne).
Cours Rgulation Industrielle
Par S.DOUBABI
1
Chapitre2 :
Critre de performance dune rgulation
1- Introduction
Lorsque l'automaticien doit raliser la rgulation d'un procd il
doit d'abord tudier le procd, et dterminer quelles sont ses
grandeurs caractristiques : entres, sorties, grandeurs d'tat si
possible. En suite, il ralise un modle du procd. Ce peut tre un
modle de comportement ou un modle de connaissance plus ou
moins dtaill (intgrant la connaissance physique que l'on a du
phnomne).
Cours Rgulation Industrielle
Par S.DOUBABI
2
Dans un premier temps, il utilise ce modle pour raliser une
simulation afin d'examiner la justesse au sein d'un systme de
commande afin de tester les rponses du procd simul face des
variations de consigne ou des perturbations. Pour cela, il mettra
au point une loi de commande qui peut tre trs simple lorsque
l'organe de commande est un P, PI ou PID ou complexe.
Ce systme de commande a pour but de permettre d'assurer la
stabilit de fonctionnement du procd, de minimiser l'influence
des perturbations et d'optimiser les performances globales.
Cours Rgulation Industrielle
Par S.DOUBABI
3
2- Schma fonctionnel d'un systme mono-variable rgul
On peut reprsenter une rgulation de la manire suivante :
P1 : perturbation mesurable
P2 : perturbation non mesurable.
Figure 2.1 : Schma fonctionnel gnral d'un systme rgul
Capteur
Transmetteur
R(s)
Y
m
Mesure
transmise
Y
Sortie
Transducteur
E(s)
Correcteur
C1(s)
Anticipateur
C2(s)
Compensateur
C3(s)
Ampli. de
puissance
Actionneur Processus
F
p
(s)
Y
c
Consigne
+
-
Ecart
c
+
+
+
+
+ +
Commande
U
F(s)
P
1
P
2
Cours Rgulation Industrielle
Par S.DOUBABI
4
L'objectif de la rgulation est de garder la sortie y aussi voisine
que possible de la consigne y
c
dsire, quelque soit les
perturbations.
La sortie est mesure l'aide d'un capteur/transmetteur indiquant
la valeur y
m
. Cette valeur est compare la consigne ("set-point")
y
c
d'o l'cart consigne mesure : c = y
c
- y
m
.
La valeur de l'cart est fournie au correcteur principal qui a pour
fonction de modifier la valeur de la variable commande u afin de
rduire l'cart c.
Le correcteur n'agit pas directement, mais travers un
amplificateur de puissance et un actionneur (vanne, moteur, )
auxquels il fournit une valeur u.
Cours Rgulation Industrielle
Par S.DOUBABI
5
3- Relations entres - sorties du systme rgul
L'tude complte d'un systme asservi exige de connatre les effets
de la commande non seulement sur la sortie du processus, mais
galement sur son entre de rglage. Dans le premier cas, on
considre les performances vis--vis de l'utilisation (temps de
rponse, prcision, ...) alors que dans le second cas, on s'intresse
plutt aux contraintes que supporte le processus; en effet, des
niveaux importants peuvent tre atteints durant les rgimes
transitoires et provoquer ainsi la saturation des organes de rglage.
Dans ces conditions, six fonctions de transfert dcrivent le
comportement de l'ensemble tel que nous l'envisageons.
Cours Rgulation Industrielle
Par S.DOUBABI
6
3.1 Fonctions de transfert sur la sortie rgle
Y(s) = P
2
(s) + F
p
(s) P
1
(s) + F(s) [C
3
(s) P
1
(s) + C
2
(s) Y
c
(s)
+C
1
(s) (E(s) Y
c
(s) - R(s) Y(s))]
Les grandeurs d'entre de ce systme linaire sont des variables
indpendantes de sorte que leurs effets peuvent tre isols
(thorme de superposition)
- Fonction de transfert en poursuite
H
pour
(s) =
0 , 0
2 1
)
) (
) (
= = P P
c
s Y
s Y
=
) ( ) ( ) ( 1
)] ( ) ( ) ( )[ (
1
1 2
s R s C s F
s C s E s C s F
+
+
,
Cours Rgulation Industrielle
Par S.DOUBABI
7
- Fonction de transfert en rgulation
- Partie mesurable : H
reg1
(s) =
0 ; 0
1
2
)
) (
) (
= = P y
c
s P
s Y
=
) ( ) ( ) ( 1
) ( ) ( ) (
1
3
s R s C s F
s C s F s F
p
+
+
,
- Partie inconnue : H
reg2
(s) =
0 ; 0
2
1
)
) (
) (
= = P y
c
s P
s Y
=
) ( ) ( ) ( 1
1
1
s R s C s F +
.
Constatations :
- La fonction H
reg2
(s) montre que le systme est insensible
toute perturbation si le produit F(s)C
1
(s)R(s) maintient un
module de valeur trs leve sur une plage frquentielle
tendue.
Cours Rgulation Industrielle
Par S.DOUBABI
8
- La partie mesurable (P
1
) des perturbations peuvent tre
limines s'il existe une fonction de transfert de compensation
C
3
(s) telle que : C
3
(s) = -
) (
) (
s F
s F
p
.
- La fonction de transfert H
pour
(s) montre d'abord que
l'anticipateur C
2
et le transducteur E permettent un ajustement
de la dynamique de poursuite indpendamment de celle des
rgulations. En suite, le module de valeur leve du produit
F(s)C
1
(s)R(s) ne peut provenir que du processus F ou du
correcteur C
1
ou des deux simultanment.
Cours Rgulation Industrielle
Par S.DOUBABI
9
3.2 Fonctions de transfert sur la commande :
U(s) = C
3
(s) P
1
(s) + C
2
(s) Y
c
(s) + C
1
(s) [E(s) Y
c
(s) - R(s) ( P
2
(s) +
F
p
(s)P
1
(s) + F(s) U(s))]
- Fonction de transfert en poursuite
L
pour
(s) =
0 ; 0
2 1
)
) (
) (
= = P P
c
s Y
s U
=
) ( ) ( ) ( 1
) ( ) ( ) (
1
1 2
s F s R s C
s E s C s C
+
+
Cours Rgulation Industrielle
Par S.DOUBABI
10
-Fonction de transfert en rgulation
- Partie mesurable : L
reg1
(s) =
0 ; 0
2
)
) ( 1
) (
= = P y
c
s P
s U
=
) ( ) ( ) ( 1
) ( ) ( ) ( ) (
1
1 3
s F s R s C
s F s R s C s C
p
+
- Partie inconnue : L
reg2
(s) =
0 ; 0
1
)
) ( 2
) (
= = P y
c
s P
s U
=
) ( ) ( ) ( 1
) ( ) (
1
1
s F s R s C
s R s C
+
En conclusion, on observe que les 6 fonctions ont un point
commun : leur dnominateur directement li aux caractristiques
du produit F(s)C
1
(s)R(s) que nous dsignons dsormais par :
T(s)=F(s)C
1
(s)R(s) la fonction de transfert de la boucle.
Cours Rgulation Industrielle
Par S.DOUBABI
11
4- Caractrisation des performances
L'analyse d'un systme rgul (asservi) dbouche toujours sur un
schma fonctionnel dont la structure gnrale est prsente sur la
figure suivante :
Figure 2.2 : Schma fonctionnel d'un systme rgul
Transducteur
E(s)
Correcteur
C(s)
Processus
F(s)
+
-
Ecart
c
Commande
U
Transmetteur
R(s)
+
+
Y
c
Consigne
P
Y
Sortie
Chane daction (directe)
G(s)
Chane de raction (retour)
Cours Rgulation Industrielle
Par S.DOUBABI
12
Dans la plupart des cas, le compensateur et l'anticipateur
n'apparaissent pas a priori, de sorte qu'une partie importante de la
synthse de la loi de commande du processus s'effectue partir du
schma relativement simplifi de la figure 3.2.
La fonction de transfert de boucle a pour expression :
T(s) = F(s) C(s) R(s) = K
u
s
1
) (
) (
s D
s N
avec deg N(s) = m < deg D(s) = n, o le nombre d'intgrateurs
(classe du systme), m le nombre de zro, n + o le nombre total de
ples, K le gain de boucle.
Cours Rgulation Industrielle
Par S.DOUBABI
13
Les fonctions de transfert en BF sont donnes par des expressions
(3) toutes factorises par 1/(1+T(s)). Il en rsulte, pour ces
expressions, un dnominateur commun dont on dmontre qu'il est
le polynme caractristique du systme.
Les racines du polynme caractristique sont les ples obtenus
lorsque le systme est boucl. Ils sont dterminants de la
dynamique du systme.
Pour un systme boucl, il suffit d'effectuer la somme du
numrateur et du dnominateur de la fonction de transfert T(s)
pour retrouver ce polynme caractristique :
P
C
(s)= KN(s) + s
o
D(s).
Cours Rgulation Industrielle
Par S.DOUBABI
14
Les ples en BF sont soit complexes conjugus, soit rels et
induisent respectivement des modes de comportement
oscillatoires ou apriodiques.
Quels sont les critres qui permettent de dfinir le cahier des
charges d'un systme asservi ?
4.1- Stabilit
a- Dfinition
Un systme est dclar stable lorsque, soumis une action
extrieure fugitive, il revient dans son tat initial.
Cours Rgulation Industrielle
Par S.DOUBABI
15
Le systme asservi doit tre stable, en d'autres termes les racines
du polynme caractristique (ples de sa fonction de transfert de la
boucle) doivent tre partie relle ngative, donc se situent dans la
partie gauche du plan complexe (Re, Im).
Figure 3.3 : Ples stables
Im
Re
Cours Rgulation Industrielle
Par S.DOUBABI
16
- Dtermination des conditions de stabilit :
- Les mthodes du lieu des ples sont gnrales sans restriction
d'application. De plus, elles renseignent directement sur la
nature du ou des modes instables, mais il est souhaitable de
disposer d'un outil logiciel pour la mise en uvre.
- Le critre de Routh
- Le critre de revers
- Le critre de Nyquist
En prsence d'un retard on utilise la formule de Pad pour
approcher efficacement l'effet d'un retard :
e
Ts
2 2
12
1
2 2
12
1
5 , 0 1
5 , 0 1
s T Ts
s T Ts
+ +
+
.
Cours Rgulation Industrielle
Par S.DOUBABI
17
Cette approximation est trs suffisante pour valuer les conditions
de stabilit.
b- Degr de stabilit
Un systme stable exhibe un comportement transitoire :
- lent sil possde un ple rel trop proche de lorigine,
- oscillatoire mal amorti sil possde une paire de ples
complexes conjugus proches de laxe des imaginaires.
Ainsi, la stabilit dun systme ne veut pas toujours dire un
comportement satisfaisant.
Un comportement convenable exige non seulement que les ples
du systme aient tous une partie relle ngative mais en plus quils
soient situs suffisamment loin de laxe des imaginaires purs.
Cours Rgulation Industrielle
Par S.DOUBABI
18
Ces considrations justifient l'ajout d'une zone d'exclusion, dfinie
par une droite verticale d'abscisse -3/T
M
signifiant que les ples
rels les plus lents assurent chacun un rgime transitoire d'une
dure maximale gale T
M
.
Figure 3.4 : Marge de stabilit
Re
Im
-3/T
M
Ples
dominants
Cours Rgulation Industrielle
Par S.DOUBABI
19
La marge de stabilit absolue, fixe
u
=3/T
M
, est respecte en
recherchant les conditions de stabilit aprs avoir effectu le
changement de variable suivant: s s-u.
T
M
: correspond la dure maximale du rgime transitoire des
ples rels les plus lents ou des ples complexes conjugus
suffisamment amortis .
La mthode des lieux des ples ou le critre de Routh sont alors
appliqus T
u
(s)=T(s-u).
Cours Rgulation Industrielle
Par S.DOUBABI
20
c- Amortissement
A une paire de ples complexes conjugus correspond au niveau
de la rponse indicielle du systme, un terme oscillatoire de la
forme : e
at
sin(bt+).
Le facteur sin(bt+) a une priode de 2t/b secondes.
La condition de bonne stabilit est que les ples complexes ne
soient pas situs dans la zone du plan comprise entre laxe
imaginaire et les deux demi-droites faisant avec lui un angle
donn.
Cours Rgulation Industrielle
Par S.DOUBABI
21
Figure 3.5 : Amortissement minimal
Re
Im
-3/T
M
Cours Rgulation Industrielle
Par S.DOUBABI
22
Prescrire une marge de stabilit pour le systme linaire, cest
choisir les rels 3/T
M
et et interdire pour ses ples la zone du
plan hachure sur la figure 3.5.
Pour un systme mode dominant du seconde ordre, l'angle
reprsente le facteur d'amortissement minimum puisque sin
d- Marge de gain et marge de phase
Les marges de gain et de phase sont une manire de qualifier le
degr de stabilit et d'amortissement d'un systme asservi
Marge de gain : Elle correspond au coefficient multiplicateur
du gain de boucle qui conduit le systme la limite de stabilit,
soit:
m
g
=
) (
1
c
j T e
avec Arg(T(jw
c
)) = - 180,
Cours Rgulation Industrielle
Par S.DOUBABI
23
Ou m
g,dB
= -20log/T(jw
c
)/.
Marge de phase : Elle correspond l'avance de phase , par
rapport la frontire de stabilit, que prsente la fonction de
transfert T(jw) lorsque son module est unitaire, soit :
m
p
= t + Arg ( T(jw
1
)) avec /T(jw
1
)/=1.
Figure 6 : Marge de gain et marge de phase
/T/
dB
Arg(T)
-180
m
g
m
p
e
c
e
1
Re
Im
e
c
e
1
-1
1/m
g
m
p
Cours Rgulation Industrielle
Par S.DOUBABI
24
L'imposition de valeurs minimales ces marges vise assurer un
degr de stabilit correct au systme. En pratique, il est d'usage de
respecter simultanment les conditions m
p
>45 et m
g
>5dB.
4.2- Rapidit
a- Influence des ples
Les ples ne doivent pas tre trop ngative car cela signifie quon
souhaite une rponse trs rapide en boucle ferme qui ne peut tre
obtenue quau prix dune sollicitation trs importante des
actionneurs. Dans le plan complexe, cette disposition restreint
encore le domaine des ples dominants qui doivent rester en de
d'une frontire de rapidit.
Cours Rgulation Industrielle
Par S.DOUBABI
25
Figure 3.7 : Limitation impose pour ne pas trop solliciter les
actionneurs
Re
Im
-3/T
M
Cours Rgulation Industrielle
Par S.DOUBABI
26
b- Influence des zros
La nature des zros dun systme, comme celle des ples, joue un
rle important dans sa dynamique. Lexistence de zros
correspond la prsence de termes lis aux drives de lentre et
va donc accrotre la "vitesse de raction" dun processus pouvant
mme, si un zro est dominant par rapport au(x) ple(s), provoquer
un risque de dpassement dans le cas dune variation brutale de
lentre du type chelon de position (figure 3.8).
Exemple :
) 1 )( 1 (
1
) (
2 1
s b s b
as
s F
+ +
+
=
Cours Rgulation Industrielle
Par S.DOUBABI
27
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
2
a = - 2 , b 1 = 1 , b 2 = 0 . 1
a = 0 . 5 , b 1 = 1 , b 2 = 0 . 1
a = 0 , b 1 = 1 , b 2 = 0 . 1
a = 2 , b 1 = 1 , b 2 = 0 . 1
Figure 3.8 : Influence des zros sur la dynamique dun systme
Cours Rgulation Industrielle
Par S.DOUBABI
28
La position des zros dans le plan complexe et la prsence ou non
dun retard, nous permettent de distinguer deux classes de
systmes linaires : celle des systmes dits phase minimale et
celle des autres.
Dfinition : Un systme linaire est phase minimale (on dit aussi
dphasage minimal) si :
1- sa fonction de transfert ne comporte pas de terme de retard
pur
s
e
t
,
2- ses zros sont stables,
3- ses ples sont stables.
Un systme qui nest pas phase minimale est dit phase non
minimale ou encore dphasage non minimal (on dit aussi non
minimum de phase).
Cours Rgulation Industrielle
Par S.DOUBABI
29
4.3- Prcision
Le systme rgul est prcis si tout instant la grandeur de sortie
y(t) doit tre au plus prs de sa consigne y
c
(t). Pour qualifier et
quantifier cette prcision, on analyse l'cart ou l'erreur entre ces
deux grandeurs, soit c(t) = y
c
(t)-y(t). Cet cart est tudi en rgime
permanent ou en rgime transitoire, selon que l'on s'intresse la
prcision statique ou la prcision dynamique.
a- Prcision statique des systmes asservis
En gnral, la prcision statique ou l'erreur en rgime permanent
est plus employe lors de la conception des systmes asservis.
Cours Rgulation Industrielle
Par S.DOUBABI
30
Une telle erreur est dfini comme tant la valeur prise par c(t)
lorsque le temps tend vers l'infini.
La fonction de transfert en boucle ouverte d'un systme asservi est
de la forme :
T(s) = u
s
K
... 1
... 1
1
1
+ +
+ +
s a
s b
, K gain statique, o classe du systme.
Lcart c(s) = y
c
(s)-y(s) scrit sous la forme c(s) =
) ( 1
1
s T +
y
c
(s).
Lcart statique
) ( lim ) (
0
s s
s
c c
=
et lorsque s tend vers zro T(s) K/s
o
alors
) ( lim ) (
0
s y
K s
s
s
c
s
+
=
u
u
c
.
Le tableau suivant rsume les rsultats obtenus pour les signaux
tests unitaires en chelon de position, de vitesse (rampe) et
d'acclration (parabole) et pour diffrentes classes de systme:
Cours Rgulation Industrielle
Par S.DOUBABI
31
Signal test
u
=0
u
=1
u
=2
Position 1/(K+1) 0 0
Vitesse
1/K 0
acclration
1/K
La prcision statique est d'autant meilleure que K possde une
valeur leve.
Classe
Cours Rgulation Industrielle
Par S.DOUBABI
32
b- Prcision dynamique des systmes asservis
Assurer une bonne prcision dynamique c'est garantir un bon
comportement de la partie transitoire de l'cart
c
(t). On entend
par ceci un amortissement suffisant et une convergence assez
rapide de la partie transitoire.
Assurer un amortissement suffisant revient prescrire une borne
suprieure pour le coefficient de rsonance Q (facteur
damortissement pour les systmes de 2
me
ordre). Le problme qui
consiste rduire le temps de convergence de la partie transitoire
est un problme de rapidit, trs li la bande passante du
systme.
Cours Rgulation Industrielle
Par S.DOUBABI
33
A prsent, montrons sur un exemple que la bande passante d'un
systme caractrise sa rapidit.
Cours Rgulation Industrielle
Par S.DOUBABI
34
Exemple : Considrons le systme de fonction de transfert de
boucle T(s) =
) 1 ( Ts s
K
+
, la fonction de transfert en boucle ferme est
donc H(s) = 2
1
1
) ( 1
) (
s
K
T
K
s
s T
s T
+ +
=
+
. En posant
KT 2
1
=
et
T
K
n
= e
,
Nous obtenons H(s) =
2
2
2
1
1
n n
s
s
e e
+ +
.
Etudions le rgime transitoire de
c
(t) qui rsulterait de
lapplication au systme asservi dune consigne en chelon
unitaire. Supposons dans un premier temps que le coefficient
Cours Rgulation Industrielle
Par S.DOUBABI
35
damortissement est suprieur 1. Dans ce cas, nous savons que la
rponse indicielle du systme asservi est donn par :
y(t) =
2 1
1 2
2 1
1
S S
e S e S
t S t S
+
,
avec
) 1 (
2
1
+ = e
n
S
et
) 1 (
2
2
= e
n
S
.
Dou lexpression suivante de lcart
1 2
) 1 ( ) 1 (
) (
2
2 2
2 1
+
=
c
t S t S
e e
t
Comme S
1
et S
2
sont ngatifs,
c
(t) converge vers zro. Des deux
exponentielles composant l'cart, la plus lente est e
t s
2
. Donc,
c
(t)
converge vers zro, d'autant plus rapidement que 2
S
est grand. Or,
pour un
fixe,
2
S
croit avec n
e
, donc avec la bande passante.
Cours Rgulation Industrielle
Par S.DOUBABI
36
D'aprs l'expression de n
e
, l'augmentation de n
e
peut tre ralise
par une lvation du gain statique K. Ceci demeure vrai dans le cas
gnral.
Si K continue crotre alors, compte tenue de l'expression de ,
dcrot et devient infrieur 1. La rponse indicielle et l'cart
c(t) correspondant deviennent oscillatoires en consquence donc
la diminution de la stabilit en boucle ferme.
Les considrations prcdentes sont gnrales : l'augmentation du
gain statique en boucle ouverte amliore la prcision dynamique
et rduit la stabilit.
Cours Rgulation Industrielle
Par S.DOUBABI
37
c- Critres de performances
Les critres de performances sont en gnral des "critres de
prcision". Ils ont pour but de caractriser la qualit d'un systme
asservi au moyen de la valeur prise par une certaine grandeur
dtermine partir de la rponse du systme une entre donne.
Les critres de performances permettent de dterminer les valeurs
qu'il convient de donner aux paramtres du systme; vu qu'il
existe un certain compromis entre la prcision dynamique et la
prcision statique d'un asservissement.
On va citer maintenant les critres les plus souvent utiliss :
Cours Rgulation Industrielle
Par S.DOUBABI
38
- Critre de l'intgrale du carr de l'cart (ISE Integral of the
Squared Error)
D'aprs ce critre, un systme asservi possde des performances
d'autant meilleures que la quantit I =
j dt t
2
0
) (
}
c
est faible.
Pour en montrer la signification, on va appliquer ce critre une
entre en chelon unitaire :
Cours Rgulation Industrielle
Par S.DOUBABI
39
a b
Figure 9 : a- Rponse indicielle dun systme b- : Evolution de lcart en temps
Cours Rgulation Industrielle
Par S.DOUBABI
40
c d
Figure 9 : c- Valeur absolue de lcart d- Evolution du carr de lcart
Cours Rgulation Industrielle
Par S.DOUBABI
41
Pour que I ne devienne pas infini, le systme asservi doit avoir un
cart statique nul. Les valeurs les plus leves de
, comprises
entre 0 et t
1
, jouent le rle le plus grand dans cette expression.
En fin une valeur rduite de I se traduit par une limitation de
l'amplitude des oscillations de la rponse et correspond donc un
certain amortissement du systme.
Cours Rgulation Industrielle
Par S.DOUBABI
42
- Critre de l'intgrale de la valeur absolue de l'cart (IAE
Integral of Absolute value of Error)
Avec le critre prcdent, on est souvent amen choisir un
amortissement trop faible, car
intervient au carr et les valeurs
peu leves de l'cart jouent parfois un rle insuffisant dans
l'expression de I. Aussi a-t-on propos de caractriser les
performances d'un systme asservi par
I =
}
0
) ( dt t c
Cours Rgulation Industrielle
Par S.DOUBABI
43
- Critre de l'intgrale de la valeur absolue de l'cart multiplie
par le temps (ITAE Integral of Time multiplied Absolute value
of Error)
Le critre consiste considrer le systme d'autant meilleur que
l'intgrale :
I=}
0
) ( dt t t c
est petite.
L'application de ce critre un asservissement garantit une
rduction des oscillations transitoires de longue dure pouvant
apparatre dans la rponse du systme, ainsi qu'un temps de
rponse peu lev.
Cours Rgulation Industrielle
Par S.DOUBABI
44
Exemple : Pour illustrer l'usage des critres de performances
pour l'analyse et la synthse des systmes asservis, considrons le
systme de fonction de transfert de boucle T(s)=
) 2 (
1
+ s s
et dont
la fonction de transfert en boucle ferme est : H(S) = 2
2 1
1
s s + +
.
Sa pulsation propose tant
s rad
n
/ 1 = e
, ses performances ne
dpendent que de son coefficient d'amortissement
.
On souhaite choisir
de manire minimiser un critre de
performance donn. La figure 10 montre, pour diffrents critres
de performances, la courbe reprsentant la valeur I, du critre en
fonction du coefficient d'amortissement.
Cours Rgulation Industrielle
Par S.DOUBABI
45
Figure 10 : la valeur du critre I en fonction du coefficient
d'amortissement
1
2
3
4
I
0.5 1
1.5
2
1 I =
j dt t
2
0
) (
}
c
2 I = }
0
) ( dt t c
3 I= }
0
) ( dt t t c
1
2
3
Cours Rgulation Industrielle
Par S.DOUBABI
46
L'examen de ces courbes montre que l'intgral du carr de l'erreur (1)
n'a pas une bonne slectivit, c'est dire qu'un changement de
au
voisinage du minimum (par exemple de 0,6 0,8) ne produit pas un
changement sensible de l'indice. Les autres courbes ont une meilleure
slectivit.
Les courbes de la figure 10 montrent galement, que pour le systme
du second ordre considr,
= 0,7 est la valeur optimale par rapport
l'ensemble des critre considrs.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
1
Chapitre 3
Mthodes de synthse
des correcteurs PID analogiques
1- Introduction
Un systme asservi doit tre suffisamment robuste pour
garantir trois niveaux de performance:
- Sa stabilit
- Une bonne prcision statique
- Une rapidit suffisante
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
2
Le gros problme est que ces trois critres sont
contradictoires: la prcision comme la rapidit sont lies au
gain, mais trop de gain peut avoir un effet dstabilisant.
Corriger un systme asservi, c'est assurer une
compatibilit entre ces critres contradictoires et le correcteur
sera l'lment " intelligent" qu'on ajoute au systme initial
pour assurer cette compatibilit.
Dans ce chapitre, nous tudions le rglage des paramtres
d'un correcteur dont la structure est pralablement fixe, c'est
le cas du correcteur standard PID, trs utilis dans le milieu
industriel.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
3
2- Synthse par labaque de Black-Nichols
Pour satisfaire au mieux les objectifs prcdents il
convient donc :
- d'loigner le lieu de Block de T(j
e
) du point -1 (0dB, -
180) de faon accrotre sa stabilit, un tel rsultat
conduit accrotre la marge de phase et la marge de gain,
souvent on prend m
p
>45 et m
g
> 10dB,
- d'augmenter le gain du systme en boucle ouverte, en
particulier du ct des basses frquences de faon
augmenter la prcision, l'annulation de l'erreur de statisme
peut tre obtenue si le systme en boucle ouverte admet
une intgration.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
4
- d'augmenter la bande passante en provoquant un tassement
des frquences du ct des gains levs pour le systme en
boucle ouverte, ce qui permet de limiter les distorsions
tout en diminuant le temps de rponse du processus.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
5
2.1- Rgulateur action proportionnelle
L'action proportionnelle correspond un gain constant positif
C(s) = k
p
.
En effet, il permet seulement une translation verticale du lieu
de Black du systme en BO reprsente dans l'abaque de
Black.
Un gain k <1 (attnuation) permet d'accrotre la stabilit en
abaissant la courbe mais cette action se fait au dtriment de la
prcision. Un gain >1 (amplification) permet d'accrotre la
prcision mais l'action se fait cette fois au dtriment de la
stabilit puisque 'on a m
et m
g
qui dcroissent.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
6
Le gain k =1 correspond une recopie de signal d'entre du
correcteur, mais avec une ventuelle amplification de
puissance.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
7
2.2- Rgulateur action proportionnelle et
intgrale ( PI)
Le correcteur de transmettante C(s) = k
p
( 1 +
s T
1
i
)
introduit un ple l'origine et il est caractris par les lieux de
Bode :
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
8
On constate que la correction PI n'affecte que les basses
frquences.
Elle ramne un gain infini pour e = 0, c'est dire en rgime
statique. Dans ces conditions l'cart de position est annul.
A partir de e =
i
T
2
, le correcteur PI n'a quasiment plus
d'influence.
La figure suivante rsume l'influence sur la fonction de
transfert de la boucle du correcteur PI :
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
9
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
10
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
11
Il est important d'avoir
i
T
1
<
R
e
, de faon viter un effet
dstabilisant ainsi qu'il apparat sur le schma de la figure o
le dphasage intervient trop en haute frquence. C'est
pourquoi on prfre souvent un rseau PI un simple rseau
intgrateur qui dphaserait de faon identique toute la gamme
de frquences
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
12
2.4- Rgulateur action proportionnelle et drive
( PD)
La correction drive pure n'est que thorique :
C(s) = k
p
( 1 +T
d
s).
Elle provoque un accroissement du gain et de phase vers les
frquences leves ainsi qu'il apparat sur les lieux de Bode. :
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
13
L'introduction de ce rseau correcteur (k
p
=1) produit les
modifications du lieu de Black suivantes :
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
14
On constate que pour tre efficace ce rseau correcteur doit
vrifier 1/T
d
<
R
e , c'est- - dire que l'effet doit se produire
suffisamment tt.
Dans ce cas, il y a augmentation de la marge de phase, de la
marge de gain, de la pulsation de rsonance et de la bande
passante. Globalement, il y a donc, en augmentant kp,
augmentation de la stabilit et de la prcision du systme en
statique et en dynamique.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
15
2.6- Rgulateur action proportionnelle, intgrale
et drive
Ce type de correcteur essentiellement thorique, combine les
avantages des correcteurs PI et PD
La fonction de transfert du rgulateur PID s'crit :
C(s) = k
p
( 1 +
s
i
T
1
+ T
d
s) = k
p
s T
s T T s T
i
d i i
2
1 + +
On cherche les racines du numrateur. Celles-ci sont relles si :
A
=
2
i
T
- 4T
i
T
d
=
2
i
T
( 1 -
i
d
T
T 4
)
>
0.
Condition ralise pour T
d
<
4
i
T
.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
16
C(s) = kp
s T
s s
i
) 1 )( 1 (
2 1
+ +
avec
2 1
= d
T
i
T
et
2 1
+
=
i
T
les deux racines s'crivent :
;
i
d i
1
T
T
4 1 (1
2
T
+ =
) =
2
i
T
(1+
o
)
;
i
d i
T
T T
4 1 1 (
2
2
=
) =
2
i
T
(1 -
o
)
Comme
o
<1, mais relativement proche de 0 si 4T
d
~ T
i
; la
relation d'ordre entre les racines du numrateur et la
constante de temps intgrale peut scrire :
;
1 2
<
<
i
T
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
17
Pour
e
= p
e
, la phase ramene par le correcteur est nulle
p
e
=
d i
T T
1
Pour cette valeur, on vrifie que
dB
) p j ( C e
= 20 log k
p
.
Ce point particulier du lieu de transfert est intressant : les
actions intgrale et drive n'y ont plus aucune influence. On
l'appelle point de pivot.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
18
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
19
- L'action intgrale modifie les basses frquences ( gain
infini en BO) et assure un gain statique gal 0dB. L'cart
de position est nul;
- Laction drive agit sur les hautes frquences en les
amplifiants et en leur amenant une avance de phase. Il y a
donc accroissement de la bande passante et de la stabilit
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
20
2.7 Conclusion
Le correcteur qu'on essaie de synthtiser doit dformer le lieu
de transfert en boucle ouverte de manire telle que le lieu de
transfert en boucle ferme soit proche de celui d'un second
ordre quivalent de gain statique si possible gal 1,
d'amortissement proche de 0,7 et de pulsation propre
n
e
leve.
Le nombre d'intgrations en BO fixe la capacit du systme
rgul suivre sans erreur une consigne variable. Si le
systme non corrig comporte un intgrateur, il n'est peut-tre
pas ncessaire d'en mettre un dans le correcteur.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
21
3- Mthodes simplifies de synthse
des correcteurs PID analogiques
3.1- Mthodes bases sur un modle de rponse
lchelon
3.1.1 Approximation de Ziegler et Nichols
C'est la mthode la plus ancienne (1942). Elle a pour objet la
dtermination du rglage d'un rgulateur PID partir de la
rponse un chelon du procd.
Lide consiste approximer la rponse du procd un
chelon unitaire, que lon suppose apriodique, par un
modle trs simple de type F(s) = K
S
e
Ts
+
1
.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
22
Le coefficient de pente R est dfini comme tant R=
K
.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
23
Ils ont ensuite cherch, pour ce modle, les paramtres du
correcteur minimisant le critre J =
}
0
) ( dt t
.
Pratique de la mthode :
S'il est possible d'ouvrir la boucle, on rgle Kp = 1, Ti l'
et
Td 0, sans dbrancher le correcteur. On envoie un chelon
d'amplitude E
0
en entre, on observe la sortie et on mesure T
et R. Les valeurs des paramtres du correcteur sont donnes
sur le tableau au dessous. Le PID propos est un PID mixte.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
24
Rgulateur Boucle ouverte
P
K
p
=
TR
1
PI
K
p
= 0,9
TR
1
T
i
= 3,3T
PID
K
p
= 1,27
TR
1
T
i
=2T
Td = 0,5T
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
25
Cette approche est aussi valable pour un processus
intgrateur. Le modle recherch est de la forme :
F(s) = R
S
e
Ts
.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
26
Cette approche est intressante et facile mettre en uvre :
une simple rponse indicielle suffit, le calcul des paramtres
est ais et ne ncessite pas de ttonnements.
On pourra remarquer que, pour le rglage du PID, T
d
=
4
i
T
En gnral, la rponse obtenue nest pas satisfaisante mais
constitue un point de dpart pour un ajustement fin des
paramtres du correcteur utilis.
Exemple :
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
27
3.1.2 Mthode de Chien Hrones - Reswick
Les essais seffectuent en BO, mais les auteurs distinguent le
cas o le systme travaille en rgulation ou en poursuite.
Le tableau suivant donne le rglage propos pour une rponse
en BF amortissement
7 , 0 =
(temps de rponse minimum)
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
28
Rgulateur rgulation Poursuite
P
K
p
= 0,3
TR
1
K
p
= 0,3
TR
1
PI
K
p
= 0,6
TR
1
;
Ti = 4T
K
p
= 0,35
TR
1
;
T
i
= 1,2
t
PID
K
p
= 0,95
TR
1
Ti = 2,4T ;
T
d
=0,4T
K
p
= 0,6
TR
1
T
i
=
t
;
T
d
= 0,5 T
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
29
3.1.3 Mthode de loptimisation des critres
Des tables ont t tablies pour calculer le rglage optimal
dun PID, pour un modle du type :
s 1
Ke
G(s)
Ts
+
=
.
Les coefficients du rgulateur PID peuvent tre calculs par
les relations suivantes partir des coefficients de la table ci-
dessous :
b
p
T
a
k
1
k
|
\
|
=
;
|
\
|
+
=
T
d c
K T
p i
pour le rglage en asservissement ;
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
30
d
p i
T
c
K T
|
\
|
=
pour le rglage en rgulation ;
f
p
d
T
e
k
T
|
\
|
=
.
Elles sont valables si
. 1
T
0.1 s s
Dans, les cas o le retard est trs faible par rapport la
constante de temps, le plus simple consiste choisir ce
rapport 0,1.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
31
Rglage Asservissement Rglage Rgulation
ISE IAE ITAE ISE IAE ITAE
a 1.26239 1.13031 0.98384 1.3466 1.31509 1.3176
b -0.83880 -0.81314 -0.49851 -0.9304 -0.8826 -0.7937
c 6.03560 5.7527 2.71348 1.6585 1.2587 1.12499
d -6.0191 -5.7241 -2.29778 -1.25738 -1.3756 -1.42603
e 0.47617 0.32175 0.21443 0.79715 0.5655 0.49547
f 0.24572 0.17707 0.16768 0.41941 0.4576 0.41932
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
32
Les coefficients du rgulateur PI peuvent tre calculs par les
mmes relations que pour le PID avec les coefficients de la
table ci-dessous, en prenant T
d
=0.
Rglage Asservissement Rglage Rgulation
ISE IAE TAE ISE IAE ITAE
a - 0.758 0.586 1.305 0.984 0.859
b - 0.861 -0.916 - 0.960 -0. 986 -0.977
c - 1.02 1.030 0.492 0.608 0.674
d - -0.323 -0.165 - 0.739 -0.707 -0.680
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
33
3.2 Rglage en ligne
Dans un certain nombre de cas, il est impossible de laisser le
procd voluer en BO. Pour ces systmes, il est impossible
de dterminer le modle en BO du systme. On est amen
rgler le rgulateur en BF.
3.2.1 Rglage par essai - erreur
Le rglage en ligne peut se faire de faon empirique en
utilisant une procdure quon peut rsumer ainsi
1- Mettre le rgulateur en mode manuel.
2- Enlever laction intgrale et drive (mettre T
i
au
maximum T
d
au minimum).
3- Mettre le gain une faible valeur.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
34
4- Mettre le contrleur en mode automatique.
5- Faire une petite variation de consigne et observer la
rponse de la variable contrle. Comme le gain est petit, la
rponse sera trs amortie.
6- Doubler le gain et refaire une variation de consigne.
Continuer ainsi de suite jusqu' ce que la rponse devienne
oscillante. Cette valeur du gain est note k
c
7- mettre le gain k
c
/2.
8- Faire la mme opration en rduisant T
i
par un facteur de 2,
jusqu' obtenir une rponse oscillante pour une petite
variation de consigne.
9- Mettre T
i
au double de cette valeur.
10- Procder de mme pour la constante de drive :
augmenter T
d
jusqu obtenir une rponse oscillante, puis
mettre T
d
1/3 de cette valeur.
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
35
3.1.1 Approximation de Ziegler et Nichols
Lorsqu'il n'est pas possible d'tudier le systme en boucle
ouverte, on ralise un essai de pompage. Pour cela, on fait
T
i
=
; T
d
= 0 et on augmente Kp jusqu' sa valeur critique
Kc. On mesure la priode des oscillations Tc.
Ziegler et Nichols proposent alors les valeurs de rglage du
tableau suivant :
Cours Rgulation Industrielle
Par S.DOUBABI FST Marrakech
36
Rgulateur Boucle ferm
P K
p
= 0,5 K
c
PI
K
p
= 0,45 K
c
T
i
= 0,83 T
c
PID
K
p
= 0,6 K
c
T
i
= 0,5 T
c
T
d
= 0,125 T
c
1
Chapitre 4
Correction des processus retards
1- Notion de rglabilit
Cette notion est principalement utilise pour les processus
ayant des retards purs importants. Si on examine la rponse
indicielle suivante d'un processus apriodique sans effet
intgrale :
2
On distingue trois phases successives :
- un temps de retard T
R
,
- un temps de dcollement T
d
,
- un temps de monte T
m
.
T
R
T
m
T
d
3
=T
R
+T
d
: correspond en fait au dlai ncessaire pour qu'une
commande ait une action rellement significative.
Il est en gnral plus facile dterminer que T
R
et T
d
.
L'essai tant effectu en boucle ouverte sur le processus sans
action intgrale, on appelle rglabilit le rapport T
m
/. En
pratique, le processus sera d'autant plus facile rgler que ce
rapport sera important.
Les systmes rglabilit leve ont une rglabilit T
m
/ >10.
Toute action sur l'entre provoque immdiatement une
action sur la sortie et les processus correspondants sont en
gnral faciles rguler et commander.
4
Les systmes faible rglabilit sont souvent ceux ayant un
T
m
/<4 (limite tire de l'exprience industrielle). Ces
systmes se trouvent facilement dans l'industrie en particulier
l o il y a transport de matire : Cimenterie, papeterie,
chimie etc...
5
Exemple de systme retard :
Le dbit de matire q
2
(t), en sortie du transporteur , est gal
celui en sortie de la trmie l'instant t-, tant la dure mise
par l'lment de matire considr lors de son dplacement
entre x
1
et x
2
.
x
1
x
2
Trmie
q
2
(t)
q
1
(t)
6
Si T
m
/ est faible, il faut attendre un temps lev,
comparativement la constante de temps du processus, pour
qu'une entre commence agir sur la sortie.
Si on cherche augmenter la prcision par les mthodes
usuelles comme l'accroissement du gain ou l'intervention
d'une action intgrale, on a de grands risques de dstabiliser
le processus. De tels processus ne peuvent pas en gnral tre
rguls par simples PID mais ncessitent des commandes plus
complexes du type PIR, prdicteur de Smith ou plus
gnralement une correction numrique.
7
2- Rgulateur PIR et prdicteur de Smith
Les PID ne peuvent pas compenser entirement ces retards,
et dans ces conditions, ils conduisent des rponses
fortement oscillatoires.
On utilise alors d'autres techniques dont certaines ont pour
but de masquer le retard rel afin de travailler ensuite sur la
stabilit et la prcision.
8
2.1- Correcteur PIR
L'utilisation d'un correcteur PIR, ou correcteur Proportionnel,
Intgral et Retard, est intressante dans le cas de systme
identifi selon le modle de Broda :
F(s) =
s
e
S 1
K
Le schma fonctionnel du correcteur PIR est la suivante :
9
On peut crire :
)
) e (1 A 1
A
)(
s T
1
Kp(1
(s)
U(s)
Ts
s T
1
i
i
,
(s)
U(s)
=
) e (1 s T
s) T A(1 k
Ts
i
i p
A
.
En pratique, ce correcteur est ralis sous forme numrise et
la fonction de transfert est transforme en algorithme
numrique.
10
La fonction de transfert de la boucle du systme s'crit :
T(s)=
s
s T
i
i p
e
s 1
K
) e A(1 s T
s) T A(1 K
Les choix K
p
K=1, T
i
= et T= conduisent :
T(s) =
) e A(1 s
Ae
s
s
,
et par suite un polynme caractristique ne comprenant plus
de termes de retard
P
c
(s) = 1 +
s
A
11
Les fonctions de transfert en poursuite et en rgulation ont
alors pour expressions :
Sur la sortie :
H
pour
(s) =
(s) y
y(s)
c
=
s
e
s
A
1
1
et H
reg
(s) =
p(s)
y(s)
=
s
A
e s
A
s
1
1
.
Le systme boucl se comporte comme un premier ordre
retard, de gain statique gal 1 (cart de position nul) de
constant de temps
A
ce qui revient diminuer le temps de
rponse (hors temps de retard bien entendu).
12
Sur la commande :
L
pour
(s) =
S 1
S 1
(s) y
u(s)
A
et L
reg
(s)=
s
s
A
1
1
Le coefficient A est alors fix selon la dynamique voulue ou
en fonction des conditions de prcision du rgime tabli.
Le point remarquable apport par la structure du correcteur
PIR est dans les fonctions de transfert vis -- vis du rglage
(u) qui apparaissent totalement indpendantes du retard, dans
la mesure o la compensation apporte par la boucle
interne du correcteur
) s ( W
) s ( U
est correctement ajuste.
13
2.2- Prdicteur de Smith :
Plus labor que le correcteur PIR, le prdicteur de Smith
s'utilise galement dans le cas de retard important. Il met en
jeu la fonction de transfert F(s) e
-s
du processus.
Sa fonction de transfert s'crit :
) e A(s)F(s)(1 1
A(s)
(s)
U(s)
C(s)
s
o A(s) est un correcteur classique.
14
on dduit la fonction de transfert de boucle
T(s) =
) 1 )( ( ) ( 1
) ( ) (
s
s
e s F s A
e s F s A
puis la fonction de transfert en BF:
H(s)=
A(s)F(s) 1
A(s)F(s)e
s
Le schma quivalent du systme boucl, corrig par un
prdicteur de Smith, est donc simple :
15
Le schma quivalent du systme boucl, corrig par un
prditeur de Smith, est donc simple:
On obtient un ensemble "correcteur + processus " classique
boucl, mais cette fois retard. Le correcteur tant classique
sa synthse peut s'effectuer par les mthodes classiques.
1
Chapitre 5
Mthodes analytiques de synthse
Des correcteurs analogiques
1- Mthode des polynmes de Graham et Lathrop
Dans cette mthode, on cherche atteindre un modle de fonction de transfert en
boucle ferme qui nous convient le mieux.
1.1- Approche par un seconde ordre
On essaie d'atteindre en BF le modle du deuxime ordre :
2 2
2 1
1
) ( 2 1
1
) (
r r
s H
n n
s s
+ +
=
+ +
=
o r =
n
S
est la pulsation complexe rduite.
Cette expression conduit une fonction de transfert en BO
T(s) = C(s) F(s) telle que T(s) =
) ( 1
) (
s H
s H
=
2
2
1
r r +
=
)
2
1 (
2
1
r
r +
.
T(s) prsente donc : - une intgration
- un gain statique K=
2
n
Les performances attendues sont donc les suivantes :
- cart de position nul
- cart de tranage
n
v
2
=
- dpassement fix par
2
Exemple : On prend 7 , 0 (temps de rponse minimum et faible dpassement)
e
n
est choisie de deux manires :
- Soit e
n
=
v
4 , 1
,
v
tant fix par le cahier des charges.
- Soit en fonction du temps de rponse demand ( ) 3 7 , 0 = =
n r
t
Mais attention, des exigences trop importantes sur le temps de rponse peuvent
conduire la saturation de la commande (la saturation des actionnaires entrane une
dgradation des performances attendues). On obtient alors le modle:
2
4 , 1 1
1
) (
r r
s H
+ +
= .
Si on dsire en plus un cart de tranage nul, on montre que H(s) doit avoir la forme
H(s) = .
. 1
. 1
2
r r a
r a
+ +
+
On vrifie en effet que la fonction de transfert en BO s'crit alors T(s) =
2
. 1
r
r a +
.
Le systme comporte une double intgration qui annule l'cart de tranage.
1.2- Gnralisation
Imposer le modle du deuxime ordre n'est pas toujours possible et il faut prendre
un modle plus lev quivalent au deuxime ordre.
Graham et Lathrop ont calcul les modles d'ordres suprieurs 2, quivalents au
deuxime ordre, qui minimisent le critre
}
0
, ) ( dt t t
Pour une entre en chelon unit dans le cas d'un processus en BF et ont dtermin
par simulation les valeurs des fonctions de transfert en BF de divers ordres
assurant la minimisation du critre.
Ils proposent deux modles :
- Le modle H
1
(s) correspondant 0 =
P
et
v
fini
- Le modle H
2
(s) correspondant =
P
v
= 0
3
Application
Soit un systme de F(s) =
s
K
+ 1
, que l'on veut corriger pour un correcteur C(s)
pour que le systme boucl ait les caractristiques suivantes : =
P
v
= 0 et . ~
r
t
On prend le modle H
2
(s) le plus simple : H
2
(s) =
2
2 , 3 1
2 , 3 1
r r
r
+ +
+
avec
n
S
r
= pour
, 7 , 0 on sait que .
3 3
= =
r
n
t
Dans ces conditions :
2 2
2
11 , 0 07 , 1 1
07 , 1 1
2 , 3 1
2 , 3 1
) (
2
2
s s
s
s H
n
n
n
S S
S
+ +
+
=
+ +
+
=
Comme C(s) =
)) ( 1 ( ) (
) (
s H s F
s H
alors C(s) =
2 2
11 , 0
) 1 )( 07 , 1 1 (
s K
s s
+ +
qui est
physiquement ralisable.
2- Mthode des polynmes de Naslin
Cette mthode a t propose par Naslin. Le choix de 7 , 0 impose un
dpassement maximum de 5%. On peut consentir un dpassement plus lev mais
infrieur une limite D
max
% fix l'avance, ce qui correspond un amortissement
min
.
L'origine de cette mthode est la suivante. Soit une fonction de transfert de 2
cd
ordre :
H(s) =
2
2 1 0
0
s a s a a
b
+ +
Si on pose
2
0 2
a
a
n
= ,
2
1
2
a
a
n
= et
0
0
a
b
K = , on peut ramener cette expression la
forme classique :
2 2
2
) (
s s
K
s H
n n
n
+ +
=
.
4
est donn par
n
a
a
2
1
2 = , soit . 4
2 0
2
1 2
a a
a
= Comme le rgime optimal d'un
second ordre est obtenu pour
2
2
7 , 0 = = , on en dduit que
2 0
2
1
a a
a
= 2 = o
1
.
Naslin a ensuite gnralis ce rsultat une fonction de transfert en BF de degr
quelconque.
2.1- Fonctions de transfert numrateur constant
Les fonctions de transfert proposes par Naslin sont de la forme :
n
n
s a s a a
b
s H
+ + +
=
...
) (
1 0
0
Dans laquelle il dfinit les rapports caractristiques :
,
2 0
2
1
1
a a
a
= ,
3 1
2
2
2
a a
a
= ... , ,
1 1
2
+
=
n n
n
n
a a
a
Il montre alors que le premier dpassement D
max
% l'instant t
pic
est garanti si :
. ...
0 2 1
> = = =
n
La constante
0
est de l'ordre de 2.
Naslin vrifie ensuite exprimentalement ce choix sur des fonctions de transfert
telles que b
0
=a
0
. Des fonctions de transfert de ce type donnent un cart de position
nul.
Il obtient des rsultats trs probants avec : j % log 8 , 4
2
1
0
D =
Pour cette valeur, t
pic
0
1
2 , 2
a
a
~ .
Rsum
Naslin a vrifi exprimentalement que le choix d'un rglage
0 i
constant de
l'ordre de 2 : 1,8 , 4 , 2
0
avec b
0
= a
0
, permet d'assurer la rponse indicielle
un premier dpassement D (en%) l'instant t
pic
vrifiant :
log
10
(D%) 4,8- 2
0
t
pic
0
1
a
a
2 , 2
De faon gnrale la condition
0 i
avec
0
de l'ordre de 2 assure un
amortissement correct des rgimes transitoires.
5
Le tableau suivant donne des indications pour le choix de la valeur de
0
en
fonction du dpassement admissible ainsi que la valeur du coefficient
d'amortissement associ.
D 40% 20% 6% 1%
o
0
1,6 1,7 2 2,4
0,3 0,45 0,7 0,9
2.2- Fonction de transfert numrateur non constant
On a maintenant H(s) =
n
n
s a s a a
s b b
+ + +
+
...
1 0
1 0
Il peut en rsulter un accroissement du dpassement et une rduction du temps de
rponse. C'est en particulier le cas pour des systmes munis de correcteurs PI ou
PID.
La mthode reste applicable mais exige quelques modifications : Il convient
d'adopter le rglage tel que : ) 5 , 1 ( 4 5 , 1
0
0
1
1
0
+ =
b
b
a
a
c
o
c
= o
0
corrige
Les conditions b
0
= a
0
et b
1
= a
1
imposeraient des erreurs en position et vitesse
nulles.
- Si la transmittante admet un numrateur du second ordre
H(s) =
n
n
s a s a a
s b s b b
+ +
+ +
1 0
2
2 1 0
Le rglage adopter correspond :
c
= 1,5 + 16
3
2
0
1
1
0
|
|
.
|
\
|
b
b
a
a
(
0
- 1,5) avec
4
2
=
2 0
2
1
b b
b
.
Les condition b
0
= a
0
, b
1
= a
1
et b
2
= a
2
imposeraient des erreurs en position, vitesse
et acclration nulles.
6
Application :
On veut rgler le processus de fonction de transfert en BO : F(s) =
) 5 1 )( 1 (
2 , 3
s s + +
avec les performances suivantes :
- cart de position
p
= 0
- dpassement D 10%
Le systme ne possde pas d'intgrateur, le correcteur doit tre de type PI. Sa
fonction de transfert s'crit C(s) = k
p
( 1 +
s T
i
1
) et on va chercher rgler k
p
et T
i
La fonction de transfert en BF s'crit : H(s) =
CF
CF
+ 1
=
) 5 1 )( 1 ( ) 1 ( 2 , 3
) 1 ( 2 , 3
s s s T s T k
s T k
i i p
i p
+ + + +
+
H(s) =
3 2
5 6 ) 1 2 , 3 ( 2 , 3
2 , 3 2 , 3
s T s T s k T k
s T k k
i i p i p
i p p
+ + + +
+
,
O nous identifions : b
0
= a
0
= 3,2k
p
, b
1
= 3,2kpT
i
, a
1
= T
i
(3,2k
p
+1) , a
2
= 6T
i
,
a
3
= 5T
i
Le critre Naslin impose
0
=
2
1
[ 4,8 - log
10
10 ] =
2
8 , 3
= 1,9
Mais cette valeur demandera tre corrige puisque le numrateur est du premier
ordre avec a
1
b
1
.
Dans ces conditions :
1
=
i p
p i
T k
k T
2 , 19
) 1 2 , 3 (
2 2
+
c
(1)
2
=
) 1 2 , 3 ( 5
36
2
2
+
p i
i
k T
T
c
(2)
donc
c
= 1,5 +4
) 1 2 , 3 ( 2 , 3
2 , 3 2 , 3
+
p i p
i p p
k T k
T k k
( 1,9 - 1,5) = 1,5 +
1 2 , 3
12 , 5
+
p
p
k
k
7
Remplaons cette valeur dans (2), il vient :
) 1 2 , 3 ( 5
36
+
p
k
1,5 +
1 2 , 3
12 , 5
+
p
p
k
k
Ce qui conduit k
p
0,57. Prenons K
p
= 0,57, on obtient tout de suite T
i
3,5s.
Une autre solution aurait t de choisir T
i
= 5s ce qui permet de compenser le ple
dominant de F(s) .
Cours Rgulation Industrielle
Par S. DOUBABI FST Marrakech
1
Chapitre 6
Numrisation dun rgulateur analogique
Pour fixer les paramtres dun rgulateur analogique, on utilise deux approches :
- La premire est une mode pratique, par exemple celle de Ziegler-Nichels toujours
apprcie dans la pratique.
- La deuxime est une synthse analytique fournissant la fonction de transfert du
rgulateur C(s).
Figure 1 : Schma fonctionnel intervenant dans le dimensionnement de rgulateur
analogique
1- Echantillonnage du rgulateur analogique
Une faon de traduire sous forme dalgorithme la fonction de transfert C(s)
dcoulant dune synthse analogique se fonde sur lapproximation que la mise en
srie de convertisseur analogique - numrique et numrique - analogique ne
dforme pratiquement pas un signal analogique, comme le schmatise la figure
suivante :
=
Figure 2 : Approximation commise lors dune numrisation par chantillonnage
Correcteur
C(s)
Processus
F(s)
+
-
Ecart
c
Commande
U
Y
c
Consigne
Y
Sortie
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CAN
e(t)
CAN CNA
e(t)
Cours Rgulation Industrielle
Par S. DOUBABI FST Marrakech
2
Il est clair que lapproximation est dautant meilleure que la priode
dchantillonnage est petite et que les signaux en jeu varient lentement au cours du
temps.
En commettant cette approximation, la fonction de transfert C(s) est maintenant
complte en amont et en aval par des convertisseurs. Le schma fonctionnel de la
figure 2 et donc remplace par celui de la figure 3.
Figure 3 : Transformation du schma fonctionnel de la figure 4.2
Thorme :
Supposons que le processus analogique est au report, linaire, causal et
stationnaire ; soit C(s) sa fonction de transfert. Alors la mise en srie du C.A.N, du
systme et du C.A.N est un processus discret dcrit par la fonction de transfert
discrte :
)
`
=
)
) (
( ) 1 ( ) (
1 1
s
s C
L Z z z C
Dmonstration :
Le C.N.A, le systme et le C.A.N sont tous des lments au report, linaire, causal
et stationnaire, leur mise en srie est un processus discret lui aussi au report,
linaire, causal et stationnaire. Il peut ainsi tre caractris par une fonction de
transfert discrte C(z).
On sait que C(z)=U(z)/c(z) ne dpend pas de lentre c(z) slectionne.
Figure 4 :
Soit par exemple, lchelon unit {c(kA)}={, 0,1,1, } dont la transforme en z
est c(z)=z/(z-1).
CAN CAN CAN CAN CAN CAN CAN CAN
c(z)
C(s) CAN CAN CAN CNA CAN CNA G(s)
c(s)
c(s) u(s)
u(z) u(s)
y(s)
yc(s)
C(z)
CAN CAN CAN CAN CAN CAN CAN CAN C(s) CAN CAN CAN CNA
c(s) u(s)
c(z)
u(z)
C(z)
1 z
z
s
1
s
s C) (
{ ]
) (
[
1
s
s C
L Z
Cours Rgulation Industrielle
Par S. DOUBABI FST Marrakech
3
Dans ce cas la sortie du C.N.A est e(s)=1/s, le systme fournie alors la rponse
C(s)/s, ou dans le domaine temporel u(t)=L
-1
(C(s)/s). Finalement, le C.A.N gnre
le signal discret {u(kA)}. Sa transfert en z est U(z)= Z{L
-1
[C(s)/s]}.
Remarque :
U(s)=C(s)/s => u(t)=L
-1
(C(s)/s).
En fait, par Z{ L
-1
(C(s)/s)}, il faut comprendre la transforme en z de la version
chantillonne u(kA) du signal analogique u(t).
Do le schma fonctionnel de la figure 5
Lvaluation des paramtres de C(z) est ainsi acheve; Il suffit ds lors de raliser
lalgorithme en codant lquation aux diffrences associe C(z).
Exemple :
Soit un rgulateur PID analogique de fonction de transfert
)
1
1
1 ( ) (
s
N
T
s T
s T
K s C
d
d
i
p
+
+ + =
La valeur N=10 est souvent adopte en pratique. Au niveau de la synthse de ce
rgulateur, la constante de temps T
d
/N peut normalement tre nglige.
On admet que les paramtres K
p
, T
i
et T
d
ont t ajusts. Alors
+
+ + =
)
1
1
1 ( ( ) 1 ( ) (
1 1
s
N
T
s T
s T s
K
L Z z z C
d
d
i
p
Quelques calculs conduisent :
)
) 1 (
1
1 ( ) (
d
T
N
i
p
e z
z N
z
T
K z C
A
A
+ =
c(z)
C(z) CAN CNA G(s)
c(s) u(z) u(s)
y(s) yc(s)
Cours Rgulation Industrielle
Par S. DOUBABI FST Marrakech
4
2- Approximations numriques
Partons du rgulateur C(s) issu dune synthse analogique :
n n
n
m m
m
a s a s
b s b s b
s E
s U
s C
+ + +
+ + +
= =
1
1 0
...
...
) (
) (
) ( m n > (4.1)
Ou, sous la forme dune quation diffrentielle :
) ( ) ( ... ) ( ) ( ) ( ... ) (
1
) (
0 1
) (
t b t b t b t u a t u a t u
m m
m
n n
n
+ + + = + + +
-
Cette relation est maintenant crite au temps t=kA :
) ( ) ( ... ) ( ) ( ) ( ... ) (
1
) (
0 1
) (
A + A + + A = A + A + + A
-
k b k b k b k u a k u a k u
m m
m
n n
n
(4.2)
Lide est de remplacer les grandeurs de diffrentielle, telles que drive, par des
approximations numriques.
On considre tout dabord la premire mthode dEuler. Soit
A
A A + A
= A
A
-
) ( ) (
) (
lim
0
k u k u
k u
Cette expression est change avec
A
A A + A
= A
-
) ( ) (
) (
k u k u
k u (4.3)
Soit maintenant
A
A A + A
= A
- -
A
- -
) ( ) (
) (
lim
0
k u k u
k u
Cette quantit est remplace par
A
A A + A
= A
- -
- -
) ( ) (
) (
k u k u
k u
Cours Rgulation Industrielle
Par S. DOUBABI FST Marrakech
5
En remplaant
-
u par son expression, on a :
2
) ( ) ( 2 ) 2 (
) (
A
A + A + A A + A
= A
- -
k u k u k u
k u (4.4)
En portant les quantits (4.3) et (4.4) et celles obtenues par u
(3)
(kA), , u
(n)
(kA),
c
(1)
(kA), ,c
(m)
(kA) dans (4.2), puis en prenant la transforme en z des deux
membres, on obtient :
) (
1
) (
1
2
1
) (
2
...
1
) (
0
) (
1
) (
1
2
1
) (
2
...
1
) ( z E
m
b
z
z E
m
b
z
z E
m
b
m
z
z E b z U
n
a
z
z U
n
a
z
z U
n
a
n
z
z U +
A
+
A
+ +
A
= +
A
+
A
+ +
A
Avec U(z)=Z (u(kA)) et E(z)=Z(c(kA)).
Il en rsulte la fonction de transfert discrte :
n
z
n
n
z
m
z
m
m
z
a a
b b b
z E
z U
z C
+ + +
+ + +
= =
A
1
1
1
1
1
1
0
...
...
) (
) (
) ( (4.5)
En comparant (4.1) et (4.5), nous constatons que, pour numriser la fonction de
transfert C(s), il suffit de remplacer s par (z-1)/A.
Avec cette approximation, comme z=sA+1, le demi plan complexe gauche (Re s<0)
est transform dans le demi plan Re z <1 : un rgulateur analogique C(s) BIBO
stable peut conduire un rgulateur numrique C(z) qui ne lest pas.
Exemple 1:
Soit nouveau le rgulateur PID analogique. En remplaant s par (z-1)/A, on
aboutit :
)
)) ( 1 (
) 1 (
1
1 ( ) (
d
i
p
T
N z
z N
z
T
K z C
A
+
A
+ =
Les ples de ce correcteur sont 1 et 1-NA/T
d
;
Cours Rgulation Industrielle
Par S. DOUBABI FST Marrakech
6
Le ple rel 1-NA/T
d
est strictement plus grand que -1 si et seulement si A<2T
d
/N
est respect.
- Seconde mthode dEuler
La drive est dfinie par :
A
A A A
= A
A
-
) ( ) (
) (
lim
0
k u k u
k u
Cette expression est change avec
A
A A A
= A
-
) ( ) (
) (
k u k u
k u
De mme, la drive deuxime est remplace par
A
A A A
= A
- -
- -
) ( ) (
) (
k u k u
k u
En remplaant
-
u par son expression, on a :
2
) 2 ( ) ( 2 ) (
) (
A
A A + A A A
= A
- -
k u k u k u
k u
Aprs substitution dans (4.2) et en prenant la transforme en z des deux membres
on obtient :
) (
1
1
1
2
1
0
1
1
1
2
1
1
) (
2
1
) ( ...
1
) ( ) (
1
) (
2
1
) ( ...
1
) ( z E b
z
z E b
z
z E b
m
z
z E b z U a
z
z U a
z
z U a
n
z
z U
m m m n n n
+
A
+
A
+ +
A
= +
A
+
A
+ +
A
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
Do, finalement, la fonction de transfert discrte :
n
z
n
n
z
m
z
m
m
z
a a
b b b
z E
z U
z C
+ |
.
|
\
|
+ + |
.
|
\
|
+ |
.
|
\
|
+ + |
.
|
\
|
= =
A
1 1
1 1
1
1
1
1
1
1
0
...
...
) (
) (
) ( (4.6)
Un examen de (4.1) et (4.6) montre que, pour numriser la fonction de transfert
C(s), il faut remplacer dans celle-ci s par :
Cours Rgulation Industrielle
Par S. DOUBABI FST Marrakech
7
z
z z
A
=
A
1 1
1
.
Dans cette approche, on a z=1/(1-sA) ; en posant s=o+je :
2 2 2
) 1 (
1
) ( 1
1
A + A
=
A +
=
j
z .
Il est vident que |z|<1 si o<0 : le demi-plan complexe Re s<0 est transform en un
domaine contenu dans le cercle unit |z|<1.
Par consquent, la seconde mthode dEuler bnficie de latout quun rgulateur
analogique C(s) (BIBO) stable donne un rgulateur numrique C(z) lui aussi BIBO
stable, raison pour laquelle elle est parfois prfre la premire mthode.
Exemple 2:
Soit nouveau le rgulateur PID analogique. En remplaant s par (1-z)/Az, on
aboutit :
)
1 )) ( 1 (
) 1 (
1
1 ( ) (
A
+
+
A
+ =
z
T
N
z N
z
z
T
K z C
d
i
p
La composante intgrale du rgulateur de lexemple 1 et celle obtenue maintenant
scrivent, respectivement :
1
A
z
T
i
1
A
z
z
T
i
Ou :
1
1
1
A
z
z
T
i
1
1
A
z
T
i
Ainsi, dans le second cas, vu quun facteur z
-1
engendre un retard dune priode
dchantillonnage a disparu, le signal dcart est exploit immdiatement, ce qui
peut tre bnfique lors de relativement grandes priodes dchantillonnage.
Chapitre 7
Rgulation des systmes chantillonns
Cette mthode, de synthse dun rgulateur numrique, se fond sur le
modle F(s), lequel est chantillonn. La fonction de transfert discrte F(z)
qui en rsulte rend possible une synthse tenant compte de tous les
phnomnes discrets en jeu. Il existe donc diverses techniques de synthse
discrte.
1- Correcteur ples dominants
Cette mthode est bien adapte aux processus simple c'est--dire modlisables par un systme
continu de degr maximum gal 2 avec ou sans retard. Elle fournit un correcteur
entirement numriquement, sans aucun rapport avec un PID numris. Son but est dobtenir
un systme en boucle ferme dont le comportement soit encore voisin de celui dun systme
de deuxime ordre. Le systme corrig sera caractris par :
- son rgime transitoire :
o amortissement ,,
o pulsation naturelle e
n
,
o dpassement D dsir,
o temps de rponse t
r
,
- son rgime permanant
o erreur statique de position nulle
o erreur statique de vitesse nulle
1.1 Calcul du correcteur
Pour rpondre au cahier des charges ci-dessus, le correcteur devra rpondre aux impratifs
suivants :
a) il doit composer les ples et les zros stables de la fonction de transfert en
boucle ferme, cest dire ceux situs lintrieur du cercle de rayon 1 ( lexclusion de z=0).
Ceci implique que C(z) comporte un terme C
1
(z) tel que :
) 1 )( 1 (
) 1 )( 1 (
) (
1
2
1
1
1
2
1
1
1
=
z z z z
z p z p
z C
O les pi et zi reprsentent les ples et les zros stables de la fonction de transfert en boucle
ouverte F(z).
b) Pour annuler lcart statique de position et lcart statique de tranage, il faut
que le systme soit de classe 2. Un intgrateur se caractrise par une fonction de transfert de
la forma 1/(1-z
-1
).
Donc le correcteur contiendra un terme :
q
z
z C
=
2 1
2
) 1 (
1
) (
O q est le nombre dintgrations de la fonction de transfert en boucle ouverte.
c) enfin C(z) comportera autant de paramtres que de spcifications demandes :
amortissement, temps de rponse, dpassement, Il contiendra donc un terme de la forme :
) 1 )( 1 (
) 1 )( 1 (
) (
1
4
1
2
1
3
1
1
3
=
z A z A
z A z A
z C
O les A
i
correspondent, chacun, une spcification.
Dans ces conditions, la fonction de transfert du correcteur scrit :
C(z)=KC
1
(z)C
2
(z)C
3
(z)
K est une constante.
1.2 Application
On considre le systme
) 1 (
1
) (
+
=
s s
s F muni de son bloqueur dordre zro. On dsire
asservir ce systme numriquement en utilisant un correcteur ples dominants permettant
dobtenir :
- c
p
=c
v
=0,
- ,=0.7,
- t
pic
= 4A.
Prenons A=0.5s. La fonction de transfert du processus muni de son bloqueur dordre zro est :
) 6 . 0 1 )( 1 (
1
1 . 0 ) (
1 1
1
1
+
=
z z
z
z z F
Calcul du correcteur
Il aura pour fonction de transfert
1
2
1
1
1
1
1
1
1
1 6 . 0 1
) (
=
z A
z A
z
z
K z C
Il faut calculer les trois paramtres K, A
1
et A
2
.
Ralisation du correcteur
2- prdicteur de Smith
On admet
Compensation
1 intgrateur 2 spcifications
You might also like
- Regulation CoursDocument106 pagesRegulation CoursRiadh Majd100% (4)
- Cours Régulation IndustrielleDocument58 pagesCours Régulation IndustrielleBakir Fatma95% (21)
- Technologie Et Réglage Des Régulateurs PDFDocument25 pagesTechnologie Et Réglage Des Régulateurs PDFKaziiLaggounNo ratings yet
- Régulation IndustrielleDocument63 pagesRégulation Industrielleismail100% (3)
- TP AutomatiqueDocument54 pagesTP Automatiquedjnabilos88% (8)
- Chapitre 2-Technologie Et Réglage Des RégulateurDocument9 pagesChapitre 2-Technologie Et Réglage Des RégulateurSimo LightNo ratings yet
- Régulation Et Instrumentation1Document11 pagesRégulation Et Instrumentation1Mohammed SalahNo ratings yet
- TP RegulationDocument9 pagesTP RegulationKadour HabitaNo ratings yet
- Cours RegulationDocument121 pagesCours RegulationKouakou Joseph N' Guessan75% (4)
- Exercices Regulation HEI42TCDocument60 pagesExercices Regulation HEI42TCMohamed Ben Fredj79% (14)
- Representation Symbolique de La RegulationDocument9 pagesRepresentation Symbolique de La RegulationNejmeddine Bannour67% (3)
- Régulation Industrielle-Chapitre 3-2017-1-BF (Mode de Compatibilité)Document25 pagesRégulation Industrielle-Chapitre 3-2017-1-BF (Mode de Compatibilité)amine milano100% (2)
- Exercices de Révision Régulation PDFDocument14 pagesExercices de Révision Régulation PDFnovocaine67100% (12)
- TP 1 Regulation de NiveauDocument8 pagesTP 1 Regulation de Niveauصلاح الدين100% (1)
- Cours APIs7&8Document108 pagesCours APIs7&8Fa Rachid100% (2)
- TP n03 060 Régulation de PositionDocument15 pagesTP n03 060 Régulation de Positiondebha salemNo ratings yet
- Bases Regulateur PIDDocument30 pagesBases Regulateur PIDOmar Ayadi100% (1)
- Automatique Linéaire: Asservissement & RegulationDocument55 pagesAutomatique Linéaire: Asservissement & RegulationAhmed Rhif100% (4)
- Vannes de RéglageDocument10 pagesVannes de Réglagekamari2abdou469100% (1)
- Introduction À La RégulationDocument8 pagesIntroduction À La RégulationChakib Ka100% (2)
- Régulation Industrielle-Chapitre 2-2017-BF (4 Avril 2017)Document22 pagesRégulation Industrielle-Chapitre 2-2017-BF (4 Avril 2017)amine milanoNo ratings yet
- TP Régulation de TempératureDocument10 pagesTP Régulation de TempératureHadia DjeltiNo ratings yet
- Cours - Organes D'asservissementDocument71 pagesCours - Organes D'asservissementDaniele NephtysNo ratings yet
- Travaux Dirigés de Régulation Industrielle AnalogiqueDocument38 pagesTravaux Dirigés de Régulation Industrielle AnalogiqueOthmane Jalal100% (4)
- Cours Commande 2009 2010Document150 pagesCours Commande 2009 2010Kiriku Eta Basapiztiak100% (3)
- Compte Rendu Du TP Régulation IndustrielleDocument9 pagesCompte Rendu Du TP Régulation IndustrielleJamilJaoua100% (3)
- Cours Régulation 2021Document107 pagesCours Régulation 2021Marwa CharaouiNo ratings yet
- Regulateur PIDDocument14 pagesRegulateur PIDsaidiabdelhamideNo ratings yet
- Simulation Des Correcteurs PIDDocument61 pagesSimulation Des Correcteurs PIDHachemi Bhe82% (22)
- L'Instrumentation Et La Régulation IndustrielleDocument85 pagesL'Instrumentation Et La Régulation IndustrielleRed1 share80% (5)
- TP1 Tapis Profibus VariateurDocument7 pagesTP1 Tapis Profibus Variateurjmroussel100% (2)
- Asservissement de NiveauDocument28 pagesAsservissement de NiveauMohamed Oulad100% (1)
- TD 2 (Ex & Sol)Document17 pagesTD 2 (Ex & Sol)eto 03100% (4)
- TD N°1 Introduction À La Régulation Industrielle PDFDocument3 pagesTD N°1 Introduction À La Régulation Industrielle PDFMãl ÎkNo ratings yet
- Régulation Industrielle ExerciceDocument13 pagesRégulation Industrielle ExerciceRidouan Hije100% (2)
- Régulation PIDDocument15 pagesRégulation PIDredwaneNo ratings yet
- Livre Asservissement LineaireDocument289 pagesLivre Asservissement LineaireSamir Sayah50% (6)
- Automates Programmables IndustrielsDocument32 pagesAutomates Programmables Industrielssumororo100% (1)
- Travaux Pratique RegulationDocument22 pagesTravaux Pratique RegulationAhmed LabidiNo ratings yet
- Régulation IndustrielleDocument2 pagesRégulation IndustrielleDiaa Eddine BoudiafNo ratings yet
- 04 Cours Sur Les API Siemens Ver 28 01 20 PDFDocument67 pages04 Cours Sur Les API Siemens Ver 28 01 20 PDFAmine Falaki0% (1)
- Technologie Et Reglage Des RegulateursDocument25 pagesTechnologie Et Reglage Des RegulateursMehdi Houari ZaidNo ratings yet
- 9 Regulation-Cours PDFDocument106 pages9 Regulation-Cours PDFbali100% (1)
- Chapitre1 Introduction À La RégulationDocument9 pagesChapitre1 Introduction À La RégulationAYOUB RIAD100% (1)
- ch2 Introduction A La Regulation IndustrielleDocument9 pagesch2 Introduction A La Regulation IndustrielleAhmed LabidiNo ratings yet
- Cours .ELM S2Document13 pagesCours .ELM S2Abdo MgnNo ratings yet
- Chapiter 1Document18 pagesChapiter 1Mãl ÎkNo ratings yet
- DS2019Document11 pagesDS2019Charles Thierry DIBAO ESSAKANo ratings yet
- Cours Technologie Régulateurs M1Document28 pagesCours Technologie Régulateurs M1Joseph Amond100% (1)
- Régulation AutomatiqueDocument25 pagesRégulation AutomatiquenabilNo ratings yet
- Le But de La Régulation D'un Système AutomatiséDocument18 pagesLe But de La Régulation D'un Système AutomatisékaimissNo ratings yet
- Cours L3-1Document61 pagesCours L3-1Telciano ElmanoNo ratings yet
- Iri2 PDFDocument9 pagesIri2 PDFpedrii gonzalèsNo ratings yet
- Cours - Regulation Industrielle - p1Document46 pagesCours - Regulation Industrielle - p1nouhanNo ratings yet
- 1 - La Mesure Et Les Capteurs Industriels...Document19 pages1 - La Mesure Et Les Capteurs Industriels...Lelouch Vi MaghribiaNo ratings yet
- Rapport Des Travaux PratiquesDocument33 pagesRapport Des Travaux PratiquesYassir EL AYYADINo ratings yet
- Cours - Instrumenation Industrielle - L3 - Gi - S2 - 2020Document30 pagesCours - Instrumenation Industrielle - L3 - Gi - S2 - 2020Thê ĒxęptïonNo ratings yet
- Régulation de Pression (RT 030)Document10 pagesRégulation de Pression (RT 030)Adoui HanaNo ratings yet
- Cours Régulation IndustrielleDocument47 pagesCours Régulation IndustrielleMarzakNo ratings yet
- PgiSDI 52000016 - IndF - STDCDocument24 pagesPgiSDI 52000016 - IndF - STDCsosatlantiqueNo ratings yet
- Cours D Installations Electriques Basse TensionDocument140 pagesCours D Installations Electriques Basse TensionMohamed Boulamane100% (3)
- Alarme IncendieDocument14 pagesAlarme IncendieYoussef Elbarrah100% (1)
- Etude Du Systeme de Detection - Chaymae EL MECHAL - 4055Document45 pagesEtude Du Systeme de Detection - Chaymae EL MECHAL - 4055Yassine Bouch50% (2)
- Analyzing a complex documentDocument5 pagesAnalyzing a complex documentMhéîdô Coloryo100% (1)
- Dimensionnement TransfoDocument1 pageDimensionnement TransfoYoussef Elbarrah100% (1)
- Diaporama Risque Habilitation ElectriqueDocument78 pagesDiaporama Risque Habilitation ElectriqueYoussef Elbarrah100% (1)
- Diaporama Risque Habilitation ElectriqueDocument78 pagesDiaporama Risque Habilitation ElectriqueYoussef Elbarrah100% (1)
- Alarme IncendieDocument18 pagesAlarme IncendieYury Lorenz100% (1)
- Electric It e Context Ere Gle Mentai ReDocument13 pagesElectric It e Context Ere Gle Mentai ReYoussef Elbarrah100% (1)
- Diaporama Risque Habilitation ElectriqueDocument51 pagesDiaporama Risque Habilitation ElectriqueYoussef Elbarrah100% (1)
- Cours Electricite V1 4Document42 pagesCours Electricite V1 4Youssef Elbarrah100% (1)
- Alarme IncendieDocument0 pagesAlarme IncendieYoussef Elbarrah100% (1)
- GE17Document6 pagesGE17Youssef ElbarrahNo ratings yet
- Guide Utilisation DIALUXDocument25 pagesGuide Utilisation DIALUXYoussef ElbarrahNo ratings yet
- DialDocument5 pagesDialYoussef ElbarrahNo ratings yet
- Dimensionnement Des Installations Courants Forts Et Courants FaiblesDocument70 pagesDimensionnement Des Installations Courants Forts Et Courants FaiblesSoufyan PowerNo ratings yet
- NFS 61-930Document6 pagesNFS 61-930Youssef Elbarrah67% (3)
- Changer Sa VieDocument31 pagesChanger Sa VieYoussef ElbarrahNo ratings yet
- DialDocument5 pagesDialYoussef ElbarrahNo ratings yet
- Securite in Cen Die 2002Document58 pagesSecurite in Cen Die 2002Yury LorenzNo ratings yet
- Systeme de Securite IncendieDocument33 pagesSysteme de Securite IncendieYoussef Elbarrah100% (1)
- 122.02 - Cours - Electricite DomestiqueDocument4 pages122.02 - Cours - Electricite DomestiqueYoussef Elbarrah100% (1)
- 5.2 Installations Électriques: Liste de MatérielDocument1 page5.2 Installations Électriques: Liste de MatérielMayssa RjaibiaNo ratings yet
- 24-Systeme Secu IncendieDocument1 page24-Systeme Secu IncendieYoussef ElbarrahNo ratings yet
- 95 Microsoft Word - Methode Analyse de TexteDocument4 pages95 Microsoft Word - Methode Analyse de TexteYoussef ElbarrahNo ratings yet
- 4 Energie ElectriqueDocument4 pages4 Energie ElectriqueYoussef Elbarrah100% (1)
- 1 1Document12 pages1 1Adel ShatlaNo ratings yet
- Installations 351lectriquesDocument6 pagesInstallations 351lectriquesYoussef Elbarrah100% (1)
- NormeDocument3 pagesNormeYoussef Elbarrah100% (1)
- CoursSeriesTemp Chap1Document58 pagesCoursSeriesTemp Chap1fouadNo ratings yet
- Projet Rectifie 2Document130 pagesProjet Rectifie 2Mönsîeur Abd NourNo ratings yet
- FD P 18-663 (Oct.2005) - Modalités D - Application Des Normes NF EN D - Essai Sur Les GranulatsDocument30 pagesFD P 18-663 (Oct.2005) - Modalités D - Application Des Normes NF EN D - Essai Sur Les GranulatsSoumaya AddouNo ratings yet
- DonnanDocument19 pagesDonnanYouness KhalfaouiNo ratings yet
- Joint Pont Gts 160-300Document16 pagesJoint Pont Gts 160-300fanion47No ratings yet
- Présentation Du Groupe Chimique Tunisien:: Société Arabe Des Engrais Phosphates Et AzotesDocument32 pagesPrésentation Du Groupe Chimique Tunisien:: Société Arabe Des Engrais Phosphates Et AzotesAbdessalem JerbiNo ratings yet
- Electrolytes Et Inogramme Sanguin PDFDocument16 pagesElectrolytes Et Inogramme Sanguin PDFYASMERO100% (1)
- JdF646 1 FDocument3 pagesJdF646 1 FLm BealhyNo ratings yet
- Cours1 MethnumDocument6 pagesCours1 MethnumNicollae MarinaNo ratings yet
- Prog-Cadre Concours Acces Cycle Agreg IM V24102014Document3 pagesProg-Cadre Concours Acces Cycle Agreg IM V24102014wersNo ratings yet
- Livret de Cotation ISODocument14 pagesLivret de Cotation ISOPaulRoNo ratings yet
- TP Modélisation de La Machine Asynchrone A CageDocument9 pagesTP Modélisation de La Machine Asynchrone A CageRafiq80% (5)
- Devoir de Cont N°1 1ere A.S 6 2019-2020Document3 pagesDevoir de Cont N°1 1ere A.S 6 2019-2020Mohamed HamdeneNo ratings yet
- Modeling Kinetic of Catalytic Sensor With COMSOL Multiphysics and MATLAB For Oil and Gas ApplicationDocument2 pagesModeling Kinetic of Catalytic Sensor With COMSOL Multiphysics and MATLAB For Oil and Gas ApplicationElbahi DjaalabNo ratings yet
- Final Cour MergedDocument5 pagesFinal Cour MergedTalhi AbdelazizNo ratings yet
- Statique 3D 477704 - 4167Document4 pagesStatique 3D 477704 - 4167xevniNo ratings yet
- TP3 Solutionnaire PDFDocument3 pagesTP3 Solutionnaire PDFFPNo ratings yet
- TD CapteursDocument9 pagesTD CapteursAbdelkarim RamNo ratings yet
- Séance 1Document35 pagesSéance 1Abdelilah ChoghalNo ratings yet
- Carbonatation Du BétonDocument2 pagesCarbonatation Du BétonchatxxnoirNo ratings yet
- Exemple PB de TransportDocument4 pagesExemple PB de Transportnemir chaimaNo ratings yet
- 2Document37 pages2AliXmetecNo ratings yet
- Suite de TribonacciDocument2 pagesSuite de Tribonaccimickydu70No ratings yet
- Microsoft Word - TD - Serie1Document2 pagesMicrosoft Word - TD - Serie1Driss Miral Achemlal0% (1)
- RapportDocument26 pagesRapportfati_elmoubarakiNo ratings yet
- PoutreDocument9 pagesPoutreAbdelhakim ZanatiNo ratings yet
- Pfe MulticerameDocument40 pagesPfe MulticerameAbdelhamidOughanemNo ratings yet
- Les Circulateurs PDFDocument11 pagesLes Circulateurs PDFAmine Mech0% (1)
- Exemple Controle TP CorrigeDocument2 pagesExemple Controle TP CorrigeMohamed OuaggaNo ratings yet