You might also like
- Magnetic Coordinate Systems: K.M. LaundalDocument33 pagesMagnetic Coordinate Systems: K.M. LaundalMaria RitaNo ratings yet
- Orbits Used For Satellite CommunicationsDocument17 pagesOrbits Used For Satellite CommunicationsshirjeelzafarNo ratings yet
- Magnetic Coordinate Systems: K.M. LaundalDocument34 pagesMagnetic Coordinate Systems: K.M. LaundalWara WaraNo ratings yet
- Signal Processing Method For Distributed SAR Imaging ImprovementDocument4 pagesSignal Processing Method For Distributed SAR Imaging ImprovementJuan Manuel MauroNo ratings yet
- Srep21050 s1Document71 pagesSrep21050 s1walideNo ratings yet
- Ilcev ICEEOT Pg4505-4513 2016Document9 pagesIlcev ICEEOT Pg4505-4513 2016Eslam SaeedNo ratings yet
- Comunicaciones Satelitales 2da Edicion Timothy Pratt, Charles W. Bostian, Jeremy E. AllnuttDocument143 pagesComunicaciones Satelitales 2da Edicion Timothy Pratt, Charles W. Bostian, Jeremy E. AllnutthackermasboNo ratings yet
- Comunicaciones Satelitales 2da Edicion Timothy Pratt, Charles W. Bostian, Jeremy E. AllnuttDocument143 pagesComunicaciones Satelitales 2da Edicion Timothy Pratt, Charles W. Bostian, Jeremy E. AllnuttAlfa Group0% (1)
- Ec6004 - Unit1 - Part2 Notes PDFDocument7 pagesEc6004 - Unit1 - Part2 Notes PDFHARIPRASATH ECENo ratings yet
- Satellite Orbit Doppler Shift CalculationsDocument143 pagesSatellite Orbit Doppler Shift CalculationsKelvin Delgado RiveraNo ratings yet
- tmpF183 TMPDocument7 pagestmpF183 TMPFrontiersNo ratings yet
- Need of Satellite Communication Overcomes Distance LimitationsDocument49 pagesNeed of Satellite Communication Overcomes Distance Limitationsmayuriprajapati100% (2)
- 1978 May 585-596#space Oblique ProjDocument12 pages1978 May 585-596#space Oblique Projhbl3688No ratings yet
- Captured Satellite Moves To Equatorial PlaneDocument3 pagesCaptured Satellite Moves To Equatorial PlaneJoseph StanovskyNo ratings yet
- NASA Satellite CrashDocument6 pagesNASA Satellite CrashMMhammed AlrowailyNo ratings yet
- Satellite Communications 2nd Ed by Timothy Pratt, Charles W (1) - Bostian Sample From CH 2Document5 pagesSatellite Communications 2nd Ed by Timothy Pratt, Charles W (1) - Bostian Sample From CH 2Darshan Vaswani40% (5)
- Using Linear Algebra to solve GPS problemDocument5 pagesUsing Linear Algebra to solve GPS problemalejoelingNo ratings yet
- Lecture 3Document18 pagesLecture 3TyDolla ChicoNo ratings yet
- 1.6 A Space Application For Strings: The TSS 47Document5 pages1.6 A Space Application For Strings: The TSS 47Silvio VarricchioNo ratings yet
- Walker-Delta Satellite Constellation For EarthObservationDocument39 pagesWalker-Delta Satellite Constellation For EarthObservationvalstavNo ratings yet
- HW 1 KkllohDocument41 pagesHW 1 KkllohKelvin Loh Kwong LamNo ratings yet
- Chapter 2Document68 pagesChapter 2arebuNo ratings yet
- ISI Theodolite Coordinate CalculationsDocument9 pagesISI Theodolite Coordinate CalculationsSunil NepalNo ratings yet
- TIGRISAT Orbital MotionSimulation and AnalysisDocument8 pagesTIGRISAT Orbital MotionSimulation and AnalysisMohammad Chessab MahdiNo ratings yet
- Azimuth Method For Ship Position in Celestial NavigationDocument8 pagesAzimuth Method For Ship Position in Celestial NavigationVen TvNo ratings yet
- Measurement of Gravitational Spin-Orbit Coupling in A Binary Pulsar SystemDocument5 pagesMeasurement of Gravitational Spin-Orbit Coupling in A Binary Pulsar SystemMhd CarrollNo ratings yet
- Unit 5 SCDocument91 pagesUnit 5 SCs gopala krishnaNo ratings yet
- Assignment - 1Document21 pagesAssignment - 1shoyeb ahmedNo ratings yet
- Orbital Parameters and Kepler's LawsDocument16 pagesOrbital Parameters and Kepler's LawsHarendra KumarNo ratings yet
- Orbital Effects of Lorentz-Violating Standard Model Extension Gravitomagnetism Around A Static Body: A Sensitivity AnalysisDocument9 pagesOrbital Effects of Lorentz-Violating Standard Model Extension Gravitomagnetism Around A Static Body: A Sensitivity AnalysisBayer MitrovicNo ratings yet
- Lowrie SolutionDocument19 pagesLowrie SolutionVijay Yadav100% (1)
- SAR Interferometry - Principles & Applications (RSChatterjee)Document33 pagesSAR Interferometry - Principles & Applications (RSChatterjee)sgrrsc100% (1)
- The Earth Geometry: Position and Velocity Initialization For Navigation in ECI/ECEFDocument17 pagesThe Earth Geometry: Position and Velocity Initialization For Navigation in ECI/ECEFhemakhannaNo ratings yet
- Lunar TrajectoriesDocument19 pagesLunar TrajectoriesAdrian ArasuNo ratings yet
- 2.orbital Aspects of Satellite CommunicationsDocument65 pages2.orbital Aspects of Satellite Communicationsمحمود عبدالرحمن ابراهيمNo ratings yet
- Solutions Manual Satellite Communications: Timothy Pratt, Charles Bostian, Jeremy AllnuttDocument201 pagesSolutions Manual Satellite Communications: Timothy Pratt, Charles Bostian, Jeremy AllnuttMichael100% (1)
- Coordinate SystemsDocument43 pagesCoordinate SystemsDragan LazicNo ratings yet
- Appendix A Coordinate TransformationDocument21 pagesAppendix A Coordinate TransformationWahyu Teo ParmadiNo ratings yet
- Iwscff 2013Document14 pagesIwscff 2013Sung Wook PaekNo ratings yet
- Lecture 2Document4 pagesLecture 2Abhay RawatNo ratings yet
- Near-Earth Asteroids Detection Rate With LISA: P TricaricoDocument8 pagesNear-Earth Asteroids Detection Rate With LISA: P TricaricosmswamyNo ratings yet
- Instantly Determine Position with 1 SatelliteDocument9 pagesInstantly Determine Position with 1 SatellitepathmakerpkNo ratings yet
- EE 418 Project IDocument10 pagesEE 418 Project IMMhammed AlrowailyNo ratings yet
- Walker-Delta Satellite Constellation For PDFDocument39 pagesWalker-Delta Satellite Constellation For PDFJoan Cebrian GalanNo ratings yet
- Eotvos EffectDocument5 pagesEotvos Effectjoff_grNo ratings yet
- Cylindrical Coordinate System: DefinitionDocument11 pagesCylindrical Coordinate System: DefinitionMujtaba KhanNo ratings yet
- Doppler and Zeeman Doppler Imaging of StarsDocument28 pagesDoppler and Zeeman Doppler Imaging of StarsPatrik SivakNo ratings yet
- ParallaxDocument11 pagesParallaxLuiz Gustavo MouraNo ratings yet
- Orbital Mechanics and LaunchersDocument53 pagesOrbital Mechanics and Launchersali70ymailNo ratings yet
- Geostationary OrbitsDocument6 pagesGeostationary Orbitsandrej rehakNo ratings yet
- Chapter9 Geodetic Aspects of Celestial NavigationDocument4 pagesChapter9 Geodetic Aspects of Celestial NavigationYasser MetaweaNo ratings yet
- Paper - Contribution of LLR To Fundamental Astronomy - Chapront - 2001Document6 pagesPaper - Contribution of LLR To Fundamental Astronomy - Chapront - 2001Singgih Satrio WibowoNo ratings yet
- Halo Catalog DescriptionDocument6 pagesHalo Catalog Descriptionabdelmoamen nosirNo ratings yet
- Orbital MechanicsDocument33 pagesOrbital MechanicsKatleho Siyabonga ButheleziNo ratings yet
- Oort ConstantsDocument10 pagesOort Constantsnevelle4667No ratings yet
- Satellite Communications Second Edition Chapter 2 SolutionsDocument21 pagesSatellite Communications Second Edition Chapter 2 Solutionsnicolasavru100% (1)
- A Simple Explicit Model: Short Term Planetary OrbitsDocument7 pagesA Simple Explicit Model: Short Term Planetary Orbitsbrown0No ratings yet
- LyricsDocument3 pagesLyricsDenfyproNo ratings yet
- Qui Tac Phat Am - Biglou - Tienganh - Com.vnDocument27 pagesQui Tac Phat Am - Biglou - Tienganh - Com.vnQuyen CongNo ratings yet
- Satellite CommunicationDocument27 pagesSatellite CommunicationDenfyproNo ratings yet
- Contadorde 3 FliflopDocument1 pageContadorde 3 FliflopRoberto Enrique PinedaNo ratings yet
- Contadorde 3 FliflopDocument1 pageContadorde 3 FliflopRoberto Enrique PinedaNo ratings yet
- Che201 Test-1Document4 pagesChe201 Test-1Fawziyyah AgboolaNo ratings yet
- Fracture Mechanics-Book PDFDocument402 pagesFracture Mechanics-Book PDFAXEL RIVERANo ratings yet
- Fluid Dynamics - 1Document69 pagesFluid Dynamics - 1eschoolindiaNo ratings yet
- KENDRIYA VIDYALAYA SANGATHAN SCIENCE SAMPLE PAPERDocument5 pagesKENDRIYA VIDYALAYA SANGATHAN SCIENCE SAMPLE PAPERrajman1990No ratings yet
- CHAPTER 2 Motion Along A Straight Line: 2.1 Position, Displacement, and Average VelocityDocument8 pagesCHAPTER 2 Motion Along A Straight Line: 2.1 Position, Displacement, and Average VelocitymikeNo ratings yet
- MOM I - Module 37Document6 pagesMOM I - Module 37Muhammad HabibNo ratings yet
- Seismic Upgrade of Existing Buildings With Fluid Viscous Dampers: Design Methodologies and Case StudyDocument12 pagesSeismic Upgrade of Existing Buildings With Fluid Viscous Dampers: Design Methodologies and Case StudyHimanshu WasterNo ratings yet
- Work and Energy Problem Sets Week 9Document10 pagesWork and Energy Problem Sets Week 9nics100% (1)
- Hydraulics and Irrigation Engineering Lab ManualDocument43 pagesHydraulics and Irrigation Engineering Lab ManualMuhammad Faisal AsifNo ratings yet
- Assignment 1 ME2820Document5 pagesAssignment 1 ME2820XNo ratings yet
- Ch-8 Motion: Difference Between Uniform and Non Uniform MotionDocument4 pagesCh-8 Motion: Difference Between Uniform and Non Uniform MotionBdbdhrhrjruhrhrNo ratings yet
- Control of Inverted PendulumDocument5 pagesControl of Inverted PendulumAhmed HwaidiNo ratings yet
- Bharathi Connection Design (22.5 X 56)Document22 pagesBharathi Connection Design (22.5 X 56)Chandrasekhar ReddyNo ratings yet
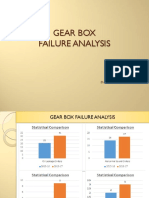
- Gear Box Failure AnalysisDocument39 pagesGear Box Failure AnalysisAli Hasnain100% (1)
- 정역학13판6~8장Document416 pages정역학13판6~8장김비돌No ratings yet
- Test Bank: Chapter 1, Problem 2Document12 pagesTest Bank: Chapter 1, Problem 2miladNo ratings yet
- Optimization Efficiency Dampers: of The of Aeolian VibrationDocument3 pagesOptimization Efficiency Dampers: of The of Aeolian VibrationServando LozanoNo ratings yet
- Circular Slab Design OptimizationDocument4 pagesCircular Slab Design OptimizationAbiyotNo ratings yet
- CIVE 192 - Summer - Course Notes Part 1Document21 pagesCIVE 192 - Summer - Course Notes Part 1DrewNo ratings yet
- 4 Worksheet (AS) : AS and A Level Physics Original Material © Cambridge University Press 2010Document3 pages4 Worksheet (AS) : AS and A Level Physics Original Material © Cambridge University Press 2010Almas TalibNo ratings yet
- PHD Thesis Pepijn de Jong - FinalDocument280 pagesPHD Thesis Pepijn de Jong - FinalsiswoutNo ratings yet
- FeCo-based BMG deformation and indentationDocument22 pagesFeCo-based BMG deformation and indentationFAIQNo ratings yet
- PUMP SIZING SPREADSHEET FOR KEROSENE TRANSFERDocument30 pagesPUMP SIZING SPREADSHEET FOR KEROSENE TRANSFEREbby Onyekwe100% (1)
- STMDocument33 pagesSTMHafidz OutsidersNo ratings yet
- Physics Ia FinalDocument11 pagesPhysics Ia FinalscarletNo ratings yet
- An Investigation of The Rubbing and Ploughing in Single Grain GrindingDocument7 pagesAn Investigation of The Rubbing and Ploughing in Single Grain GrindingpbhambareNo ratings yet
- Revised Profile Capacity-UpdateDocument2 pagesRevised Profile Capacity-UpdateRitwick BhattacharyaNo ratings yet
- P113A Homework 5 Griffith's Quantum Mechanics, Prof. DenninDocument15 pagesP113A Homework 5 Griffith's Quantum Mechanics, Prof. DenninpalisonNo ratings yet
- Book 17296 PDFDocument205 pagesBook 17296 PDFREVA ENo ratings yet
- Unit 1Document31 pagesUnit 1araz_1985No ratings yet
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusFrom EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusRating: 4.5 out of 5 stars4.5/5 (2)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Psychology Behind Mathematics - The Comprehensive GuideFrom EverandPsychology Behind Mathematics - The Comprehensive GuideNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Math Magic: How To Master Everyday Math ProblemsFrom EverandMath Magic: How To Master Everyday Math ProblemsRating: 3.5 out of 5 stars3.5/5 (15)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 4.5 out of 5 stars4.5/5 (20)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)