You might also like
- TOP 10 Univ AlgeriennesDocument28 pagesTOP 10 Univ Algeriennesjob67% (3)
- Top 10 Disciplines - MESRS - 1991-2011Document28 pagesTop 10 Disciplines - MESRS - 1991-2011jobNo ratings yet
- Chapter 1-3: Circuit EquivalantDocument11 pagesChapter 1-3: Circuit EquivalantjobNo ratings yet
- Chapter 4-1: Machine Synchrone (MS) Impimer 2016Document4 pagesChapter 4-1: Machine Synchrone (MS) Impimer 2016jobNo ratings yet
- Examen 2016 L3 Final ImprimerDocument1 pageExamen 2016 L3 Final ImprimerjobNo ratings yet
- 5Document8 pages5jobNo ratings yet
- Chapter 1-1: Electroaimants HistoriqueDocument7 pagesChapter 1-1: Electroaimants Historiquejob100% (1)
- Examen 2015 L3 FinalDocument2 pagesExamen 2015 L3 FinaljobNo ratings yet
- AutoDocument9 pagesAutojobNo ratings yet
- Chapter 1-2: Calcul Transfo AlimDocument8 pagesChapter 1-2: Calcul Transfo AlimjobNo ratings yet
- Chapitre 2-1 :MCCDocument4 pagesChapitre 2-1 :MCCjob100% (1)
- ELECTROMECANIQUEDocument9 pagesELECTROMECANIQUEjobNo ratings yet
- Exercices OnduleurDocument7 pagesExercices Onduleurhajaros100% (1)
- SIENR14Document2 pagesSIENR14jobNo ratings yet
- Contribution A La Conception de Moteurs Électriques Assistée Par 0rdinateurDocument9 pagesContribution A La Conception de Moteurs Électriques Assistée Par 0rdinateurjobNo ratings yet
- TP ObservationDocument7 pagesTP Observationjob100% (2)
- 1999 0010 12 PDFDocument6 pages1999 0010 12 PDFjobNo ratings yet
- Epreuve Automatique Mai 2013Document6 pagesEpreuve Automatique Mai 2013jobNo ratings yet
- TP Retour D'étatDocument4 pagesTP Retour D'étatKatherine DukeNo ratings yet
- Mémoire de SLAMA FatehDocument103 pagesMémoire de SLAMA Fatehjob67% (3)
- Initiation Au Calcul Des Moteurs Electriques PDFDocument7 pagesInitiation Au Calcul Des Moteurs Electriques PDFjobNo ratings yet
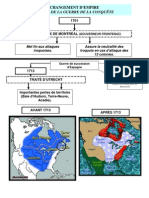
- IDENTITE 13 ColoniesDocument2 pagesIDENTITE 13 ColoniesjobNo ratings yet
- Memoire de Magister Yahiou AbdelghanixDocument85 pagesMemoire de Magister Yahiou AbdelghanixjobNo ratings yet
- Revision Dossier 3Document11 pagesRevision Dossier 3jobNo ratings yet
- Cours & TP & TD Et Site Génie EléctriqueDocument15 pagesCours & TP & TD Et Site Génie Eléctriquejob100% (4)
- Mellah Hacene Mémoire D'ingénioratDocument11 pagesMellah Hacene Mémoire D'ingénioratjobNo ratings yet
- SoutenanceDocument56 pagesSoutenancejobNo ratings yet
- Bib MSDocument9 pagesBib MSTarik ZtnNo ratings yet
- Euronorme Tevi Sudate, TraseDocument1 pageEuronorme Tevi Sudate, TraseAnghelache RazvanNo ratings yet
- Elek TonikDocument7 pagesElek Tonikchabane_148549No ratings yet
- Guide Du Projeteur OADocument312 pagesGuide Du Projeteur OAPOPOL13100% (3)
- 4 - Mâchoire Mobile - Rapport TechniqueDocument2 pages4 - Mâchoire Mobile - Rapport Techniquez9zs5vchyvNo ratings yet
- Logistique TRDocument9 pagesLogistique TRMly Al AminiNo ratings yet
- Poster AccessoiresDocument1 pagePoster AccessoiresamjadkreitNo ratings yet
- MTQ PeintureDocument7 pagesMTQ PeintureCasey RybackNo ratings yet
- Weibull Version2012 PDFDocument26 pagesWeibull Version2012 PDFMaher HammamiNo ratings yet
- 06ad2 3 01Document8 pages06ad2 3 01Nirina ArimananaNo ratings yet
- Cours L3 Genie Civil Fondation ImplantationDocument55 pagesCours L3 Genie Civil Fondation Implantationyaweldi100% (1)
- Manual Recambios H25TPX (2420311060-E09.03) PDFDocument319 pagesManual Recambios H25TPX (2420311060-E09.03) PDFValoys Miranda100% (1)
- CV OuadieDocument1 pageCV Ouadieouadie belamaniNo ratings yet
- GDM en Oeuvre PrismaDocument101 pagesGDM en Oeuvre PrismaJulia DragonNo ratings yet
- Grille D - Audit Systeme Qualite - 17025Document38 pagesGrille D - Audit Systeme Qualite - 17025aminaNo ratings yet
- TD Goupille Clavette CanneluresDocument2 pagesTD Goupille Clavette CanneluresIkram KhalfalliNo ratings yet
- Plate-Forme Duree Vie Produits ConstructionDocument4 pagesPlate-Forme Duree Vie Produits Constructiontaoufiq37100% (1)
- 5277 9 Les Stages en Milieu ProfessionnelDocument12 pages5277 9 Les Stages en Milieu ProfessionnelmarckaitaNo ratings yet
- Date Et Jury Des PFE MR MounirDocument1 pageDate Et Jury Des PFE MR MounirfefeNo ratings yet
- AYACHI - Abdesslem - e Estimateur de DégâtDocument3 pagesAYACHI - Abdesslem - e Estimateur de DégâtAbdessalem AyachiNo ratings yet
- Bordereau Des Prix Unitaires ITPRDocument63 pagesBordereau Des Prix Unitaires ITPRDaniel K KalomboNo ratings yet
- Depliant Emim Septembre 2012Document6 pagesDepliant Emim Septembre 2012Anass MerbouhNo ratings yet
- Etau de Serrage 1 PDFDocument14 pagesEtau de Serrage 1 PDFAziz ZereiNo ratings yet
- Catalogue SLAT 2019-2020 FRDocument128 pagesCatalogue SLAT 2019-2020 FRZoheir Redouane ZahzahNo ratings yet
- Terminologie Et Typologie Des Systèmes de ProductionDocument25 pagesTerminologie Et Typologie Des Systèmes de Productionlolitaaaa100% (1)
- PFE Rapport de Projet de Fin D'étude 13Document96 pagesPFE Rapport de Projet de Fin D'étude 13Salim EchbarbiNo ratings yet
- Untitled 2Document1 pageUntitled 2Mohamed FaridNo ratings yet
- Sika Monotop 610AC Nt603Document2 pagesSika Monotop 610AC Nt603reefreef67% (3)
- Rapport D'Expertise Technique Sur La Fonctionnalite Des Locaux de L'Institut Africain Des Industries Culturelles I.A.I.CDocument7 pagesRapport D'Expertise Technique Sur La Fonctionnalite Des Locaux de L'Institut Africain Des Industries Culturelles I.A.I.CIsma ZerboNo ratings yet
- Electrical EngineeringDocument338 pagesElectrical Engineeringvictor1939No ratings yet
- P4-50 Le Management de La PerformanceDocument17 pagesP4-50 Le Management de La PerformanceLavin Chris JonesNo ratings yet