You might also like
- TurbltDocument5 pagesTurbltnishith316No ratings yet
- CA March 2013 Question AnswersDocument22 pagesCA March 2013 Question AnswersManu ChakkingalNo ratings yet
- Lecture 11 - Boundary LayersDocument39 pagesLecture 11 - Boundary Layerssaeed_azshNo ratings yet
- Tutorial LES 2010 MeneveauDocument43 pagesTutorial LES 2010 MeneveauManu ChakkingalNo ratings yet
- PTEC-ICEM CFD 14.5 Tutorial Files PDFDocument326 pagesPTEC-ICEM CFD 14.5 Tutorial Files PDFDragos PastravNo ratings yet
- RedBus TicketDocument2 pagesRedBus TicketManu ChakkingalNo ratings yet
- ClickCharts Diagram Flowchart Software PrintingDocument1 pageClickCharts Diagram Flowchart Software PrintingManu ChakkingalNo ratings yet
- MIT2 29F11 Lect 13Document21 pagesMIT2 29F11 Lect 13Manu ChakkingalNo ratings yet
- Escorting Skills PDFDocument3 pagesEscorting Skills PDFManu ChakkingalNo ratings yet
- Tkaixrha4xgxsfuwkihx2w Iitd Crseoff PDFDocument73 pagesTkaixrha4xgxsfuwkihx2w Iitd Crseoff PDFManu ChakkingalNo ratings yet
- DNS of Taylor-Green Vortex at Re=1600Document5 pagesDNS of Taylor-Green Vortex at Re=1600Manu ChakkingalNo ratings yet
- Regulation of Hate Speech and Pornography After RAV PDFDocument31 pagesRegulation of Hate Speech and Pornography After RAV PDFManu ChakkingalNo ratings yet
- Steady Transport Problems: Stabilization Techniques: Problems Modeled by Convection-Diffusion-Reaction EquationsDocument13 pagesSteady Transport Problems: Stabilization Techniques: Problems Modeled by Convection-Diffusion-Reaction EquationsManu ChakkingalNo ratings yet
- Derivative From PolyDocument27 pagesDerivative From PolyManu ChakkingalNo ratings yet
- Cricket Practical Exam Support Booklet PDFDocument30 pagesCricket Practical Exam Support Booklet PDFapi-313639383No ratings yet
- 914 3689 1 PB PDFDocument16 pages914 3689 1 PB PDFnidhul07No ratings yet
- Propagate Errors in CalculationsDocument8 pagesPropagate Errors in Calculationscombatfear4No ratings yet
- NC Error PropagationDocument12 pagesNC Error PropagationSalman KhanNo ratings yet
- Wall Model Tem PDFDocument151 pagesWall Model Tem PDFManu ChakkingalNo ratings yet
- Aspirants Times Magazine UpscDocument69 pagesAspirants Times Magazine Upscadityaraman849No ratings yet
- PDFDocument10 pagesPDFManu ChakkingalNo ratings yet
- SC Electronics 2010 PDFDocument7 pagesSC Electronics 2010 PDFManu ChakkingalNo ratings yet
- Mechanical Engineering ExamDocument16 pagesMechanical Engineering ExamantonoxfordNo ratings yet
- c5 PDFDocument28 pagesc5 PDFManu ChakkingalNo ratings yet
- Public Administration PDFDocument2 pagesPublic Administration PDFManu ChakkingalNo ratings yet
- 10 1 1 95 1185 PDFDocument11 pages10 1 1 95 1185 PDFManu ChakkingalNo ratings yet
- Chapter 4 - Curve Fittin... Methods in Engineering PDFDocument9 pagesChapter 4 - Curve Fittin... Methods in Engineering PDFManu ChakkingalNo ratings yet
- Err PropDocument5 pagesErr Propscribd007aNo ratings yet
- Poison Cfds PDFDocument13 pagesPoison Cfds PDFManu ChakkingalNo ratings yet
- NC Error PropagationDocument12 pagesNC Error PropagationSalman KhanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Learners Demonstrate An Understanding Of: The Learners Should Be Able To: The Learners Should Be Able ToDocument21 pagesThe Learners Demonstrate An Understanding Of: The Learners Should Be Able To: The Learners Should Be Able ToBik Bok50% (2)
- 2019 May Chronicle AICFDocument27 pages2019 May Chronicle AICFRam KrishnaNo ratings yet
- Product CycleDocument2 pagesProduct CycleoldinaNo ratings yet
- Ana White - PLANS - A Murphy Bed YOU Can Build, and Afford To Build - 2011-03-03Document20 pagesAna White - PLANS - A Murphy Bed YOU Can Build, and Afford To Build - 2011-03-03Ahmad KamilNo ratings yet
- Extensive Reading Involves Learners Reading Texts For Enjoyment and To Develop General Reading SkillsDocument18 pagesExtensive Reading Involves Learners Reading Texts For Enjoyment and To Develop General Reading SkillsG Andrilyn AlcantaraNo ratings yet
- Weir Stability Analysis Report PDFDocument47 pagesWeir Stability Analysis Report PDFSubodh PoudelNo ratings yet
- Empowerment Technology Reviewer: First SemesterDocument5 pagesEmpowerment Technology Reviewer: First SemesterNinayD.MatubisNo ratings yet
- IntroductionDocument34 pagesIntroductionmarranNo ratings yet
- AAU5243 DescriptionDocument30 pagesAAU5243 DescriptionWisut MorthaiNo ratings yet
- MMW FinalsDocument4 pagesMMW FinalsAsh LiwanagNo ratings yet
- Programming Language Foundations PDFDocument338 pagesProgramming Language Foundations PDFTOURE100% (2)
- IP68 Rating ExplainedDocument12 pagesIP68 Rating ExplainedAdhi ErlanggaNo ratings yet
- Active and Passive Voice of Future Continuous Tense - Passive Voice Tips-1Document5 pagesActive and Passive Voice of Future Continuous Tense - Passive Voice Tips-1Kamal deep singh SinghNo ratings yet
- 2.4 Avogadro's Hypothesis+ Equivalent MassesDocument12 pages2.4 Avogadro's Hypothesis+ Equivalent MassesSantosh MandalNo ratings yet
- Obligations and Contracts Bar Questions and Answers PhilippinesDocument3 pagesObligations and Contracts Bar Questions and Answers PhilippinesPearl Aude33% (3)
- Amana PLE8317W2 Service ManualDocument113 pagesAmana PLE8317W2 Service ManualSchneksNo ratings yet
- Furnace ITV Color Camera: Series FK-CF-3712Document2 pagesFurnace ITV Color Camera: Series FK-CF-3712Italo Rodrigues100% (1)
- Reinvestment Allowance (RA) : SCH 7ADocument39 pagesReinvestment Allowance (RA) : SCH 7AchukanchukanchukanNo ratings yet
- AtmDocument6 pagesAtmAnkit JandialNo ratings yet
- NPV Irr ArrDocument16 pagesNPV Irr ArrAnjaliNo ratings yet
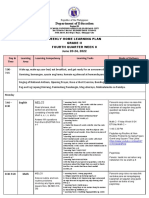
- Department of Education: Weekly Home Learning Plan Grade Ii Fourth Quarter Week 8Document8 pagesDepartment of Education: Weekly Home Learning Plan Grade Ii Fourth Quarter Week 8Evelyn DEL ROSARIONo ratings yet
- Overview of Quality Gurus Deming, Juran, Crosby, Imai, Feigenbaum & Their ContributionsDocument11 pagesOverview of Quality Gurus Deming, Juran, Crosby, Imai, Feigenbaum & Their ContributionsVenkatesh RadhakrishnanNo ratings yet
- Hawk Technology Systems v. NCLDocument6 pagesHawk Technology Systems v. NCLPriorSmartNo ratings yet
- Huawei WCDMA Primary Scrambling Code PlanningDocument22 pagesHuawei WCDMA Primary Scrambling Code PlanningZeljko Vrankovic90% (31)
- Sieve Shaker: Instruction ManualDocument4 pagesSieve Shaker: Instruction ManualinstrutechNo ratings yet
- IMM Indian Oil Case Group 3Document13 pagesIMM Indian Oil Case Group 3Soniya AgnihotriNo ratings yet
- Diemberger CV 2015Document6 pagesDiemberger CV 2015TimNo ratings yet
- Put The Items From Exercise 1 in The Correct ColumnDocument8 pagesPut The Items From Exercise 1 in The Correct ColumnDylan Alejandro Guzman Gomez100% (1)
- IELTS Vocabulary ExpectationDocument3 pagesIELTS Vocabulary ExpectationPham Ba DatNo ratings yet
- Guidelines Tax Related DeclarationsDocument16 pagesGuidelines Tax Related DeclarationsRaghul MuthuNo ratings yet