You might also like
- Stability Analysis and Controller TuningDocument19 pagesStability Analysis and Controller TuningJenny AzzahraNo ratings yet
- RT1N141C (N1)Document3 pagesRT1N141C (N1)Homer Sadych Henao MarinNo ratings yet
- Figure Tp1sal - CopieDocument4 pagesFigure Tp1sal - CopieAudrey YagueNo ratings yet
- Homework 5Document6 pagesHomework 5euler96No ratings yet
- Understanding Discrete Fourier Transform (DFT) and Fast Fourier Transform (FFT) PDFDocument16 pagesUnderstanding Discrete Fourier Transform (DFT) and Fast Fourier Transform (FFT) PDFÁc QủyNo ratings yet
- Rt1N237X Series: 〈Transistor〉Document3 pagesRt1N237X Series: 〈Transistor〉Rodolfo AndradeNo ratings yet
- Latching and UnlatchingDocument12 pagesLatching and UnlatchingOJ ACNo ratings yet
- Timers On DelayDocument5 pagesTimers On DelayOJ ACNo ratings yet
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Document13 pagesPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNo ratings yet
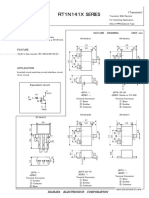
- SERIESDocument3 pagesSERIESJose Angel TorrealbaNo ratings yet
- Serie 072 RTC CouplingsDocument3 pagesSerie 072 RTC CouplingsHIDRAFLUID0% (1)
- Concept of Device Modeling (Version 1.0) : Bee Technologies IncDocument13 pagesConcept of Device Modeling (Version 1.0) : Bee Technologies IncEngr RatulNo ratings yet
- Is 8422-2 - 1977 - 2Document1 pageIs 8422-2 - 1977 - 2Svapnesh ParikhNo ratings yet
- Ab 140g R-Frame Breaker Trip CurveDocument1 pageAb 140g R-Frame Breaker Trip CurveRobbie ThompsonNo ratings yet
- Report Blanks InsulinDocument7 pagesReport Blanks InsulinHelena Muñoz GalanNo ratings yet
- Interaction Diagram For Columns NewDocument2 pagesInteraction Diagram For Columns NewBunkun1550% (2)
- Experimental Report 5 Determination of Moment of Inertia Based On Torsional VibrationDocument4 pagesExperimental Report 5 Determination of Moment of Inertia Based On Torsional VibrationCuber HCNo ratings yet
- TCL 55S405 CNET Review Calibration ResultsDocument3 pagesTCL 55S405 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- Problem 1: ME 565: Battery Systems and Control, University of Michigan, Winter 2018Document4 pagesProblem 1: ME 565: Battery Systems and Control, University of Michigan, Winter 2018hzgl25No ratings yet
- SOD123Document5 pagesSOD123stefano soriceNo ratings yet
- Figure 5. Load Regulation Figure 6. Current LimitDocument1 pageFigure 5. Load Regulation Figure 6. Current LimitGabriel EisenachNo ratings yet
- Serie 115 RTC CouplingsDocument4 pagesSerie 115 RTC CouplingsHIDRAFLUIDNo ratings yet
- Digsilent Powerfactory: Technical Reference DocumentationDocument11 pagesDigsilent Powerfactory: Technical Reference Documentationbeimar heredia saiguaNo ratings yet
- Voltage Mode Multiplying DAC Reference DesignDocument16 pagesVoltage Mode Multiplying DAC Reference DesignMouloud IbelaidenNo ratings yet
- Perno 2Document2 pagesPerno 2franklin.barrosNo ratings yet
- LECTRO 63t03 AXWQaDocument2 pagesLECTRO 63t03 AXWQaMarck SolterNo ratings yet
- Timer ParametersDocument4 pagesTimer ParametersOJ ACNo ratings yet
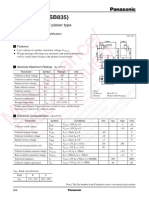
- En An Ce / Co Nti Nu Ed: Silicon PNP Epitaxial Planar TypeDocument4 pagesEn An Ce / Co Nti Nu Ed: Silicon PNP Epitaxial Planar TypeGeovanny SanJuanNo ratings yet
- An Axiomatic Approach To Turbulence by Amador MurielDocument18 pagesAn Axiomatic Approach To Turbulence by Amador MurielNicoelNo ratings yet
- CSL0406WBCW Series: Data SheetDocument10 pagesCSL0406WBCW Series: Data SheetpabloNo ratings yet
- GP Series - Valve Coupling DimensionsDocument1 pageGP Series - Valve Coupling Dimensionskumar.arunk6784No ratings yet
- Maintenance/ Discontinued: Silicon PNP Epitaxial Planer TypeDocument3 pagesMaintenance/ Discontinued: Silicon PNP Epitaxial Planer TypeDaniela Estrella Elvira CastilloNo ratings yet
- Maintenance/ Discontinued: Silicon PNP Epitaxial Planer TypeDocument3 pagesMaintenance/ Discontinued: Silicon PNP Epitaxial Planer TypeDaniela Estrella Elvira CastilloNo ratings yet
- LMTD Correction Factor ChartsDocument3 pagesLMTD Correction Factor ChartsMochammad ReshaNo ratings yet
- Interactions Between Lubricants and CoatingsDocument23 pagesInteractions Between Lubricants and CoatingsBojan PodgornikNo ratings yet
- Origin: Ni Made Armita Dewi 1508105009Document2 pagesOrigin: Ni Made Armita Dewi 1508105009Armita DewiNo ratings yet
- End Term Simulation Project1Document13 pagesEnd Term Simulation Project1chinmay garanayakNo ratings yet
- s71200 - Basic - Counters - CTUDocument4 pagess71200 - Basic - Counters - CTUboyievmuhriddin5No ratings yet
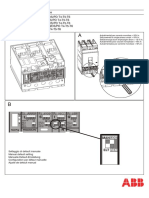
- Manual INTERRUPTOR ABBDocument5 pagesManual INTERRUPTOR ABBEsteban JaramilloNo ratings yet
- Please Click Here To Visit Our Online Spice Models DatabaseDocument3 pagesPlease Click Here To Visit Our Online Spice Models DatabaseAlan ContrerasNo ratings yet
- Epson HC4000 CNET Review Calibration ResultsDocument3 pagesEpson HC4000 CNET Review Calibration ResultsDavid Katzmaier0% (1)
- Kateryna Kyzyma - Daria Troian - Adriano Aucello - Abedelazez SafiDocument41 pagesKateryna Kyzyma - Daria Troian - Adriano Aucello - Abedelazez SafiAzez SafiNo ratings yet
- Vent To Atmosphere: Plasma Reactor CHDocument7 pagesVent To Atmosphere: Plasma Reactor CHapi-3728640No ratings yet
- Temperature at The Midplane of An Infi Nite Slab of Thickness 2 DDocument3 pagesTemperature at The Midplane of An Infi Nite Slab of Thickness 2 Dski097No ratings yet
- RG04R12503 - Wedge Nut Premachined - RSGV - DN 250 - PN 16 Rev 00Document1 pageRG04R12503 - Wedge Nut Premachined - RSGV - DN 250 - PN 16 Rev 00Aakash KumarNo ratings yet
- AzimaDLI Severity Chart 2013 PDFDocument1 pageAzimaDLI Severity Chart 2013 PDFEswin Paico de la CruzNo ratings yet
- AzimaDLI Severity Chart 2013 PDFDocument1 pageAzimaDLI Severity Chart 2013 PDFPraveen SreedharanNo ratings yet
- AzimaDLI Severity Chart 2013 PDFDocument1 pageAzimaDLI Severity Chart 2013 PDFFernando BaconNo ratings yet
- AzimaDLI Severity Chart 2013 PDFDocument1 pageAzimaDLI Severity Chart 2013 PDFEswin Paico de la Cruz100% (1)
- Com MóveisDocument158 pagesCom MóveisDaniel MestradoUNBNo ratings yet
- Beta Regression Modeling: Recent Advances in Theory and ApplicationsDocument51 pagesBeta Regression Modeling: Recent Advances in Theory and ApplicationsmuralidharanNo ratings yet
- 25 Input Voltage: 50 Igbt ResultDocument3 pages25 Input Voltage: 50 Igbt ResultEdwin KevynNo ratings yet
- En An Ce / Co Nti Nu Ed: Silicon PNP Epitaxial Planer TypeDocument4 pagesEn An Ce / Co Nti Nu Ed: Silicon PNP Epitaxial Planer TypeDaniela Estrella Elvira CastilloNo ratings yet
- Fig 9. Maximum Safe Operating Area Fig10. Effective Transient Thermal ImpedanceDocument2 pagesFig 9. Maximum Safe Operating Area Fig10. Effective Transient Thermal ImpedanceMarck SolterNo ratings yet
- IRG4PC40U: Fig. 5 - Collector-to-Emitter Voltage vs. Fig. 4 - Maximum Collector Current vs. CaseDocument1 pageIRG4PC40U: Fig. 5 - Collector-to-Emitter Voltage vs. Fig. 4 - Maximum Collector Current vs. CasePaolo RossiNo ratings yet
- TCL 65Q825 CNET Calibration ResultsDocument3 pagesTCL 65Q825 CNET Calibration ResultsDavid Katzmaier100% (1)
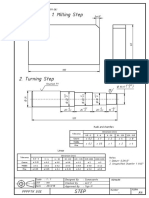
- Milling Step: PPPPTK Boe A4Document3 pagesMilling Step: PPPPTK Boe A4YounkPDNo ratings yet
- Klem C PDFDocument3 pagesKlem C PDFYounkPDNo ratings yet
- Klem C PDFDocument3 pagesKlem C PDFYounkPDNo ratings yet
- CapacitorsDocument25 pagesCapacitorsAlbert Rosete0% (1)
- Moving Charges & Magnetism Lecture 7 @physicswallahlakshyavideos PhysicswallahlakshyavideosDocument23 pagesMoving Charges & Magnetism Lecture 7 @physicswallahlakshyavideos PhysicswallahlakshyavideostanishsarmahNo ratings yet
- Electrical MCQ'sDocument4 pagesElectrical MCQ'sSalman Asgher100% (1)
- 4 Space Time SymmetriesDocument46 pages4 Space Time Symmetriesmcb0431703No ratings yet
- Assign Chap 8Document3 pagesAssign Chap 8nishedhNo ratings yet
- Polymer ProcessingDocument28 pagesPolymer ProcessingMousom SomNo ratings yet
- Grade 7 Chapter 4 WorkbookDocument19 pagesGrade 7 Chapter 4 WorkbookBrennan ColdwellNo ratings yet
- BeerVM11e PPT Ch11Document92 pagesBeerVM11e PPT Ch11brayanNo ratings yet
- Investigation of Optical and Structural PropertiesDocument14 pagesInvestigation of Optical and Structural PropertiesmarcosdavidNo ratings yet
- Refraction of Light (01!11!2023)Document5 pagesRefraction of Light (01!11!2023)navrosepreetsingh8a4hhps14No ratings yet
- Task: Apply The Principles of Circuit Theory To A Circuit With Constant Sources To Explain The Operation of That Circuits As Mentioned in The Below Task. 1. (A)Document18 pagesTask: Apply The Principles of Circuit Theory To A Circuit With Constant Sources To Explain The Operation of That Circuits As Mentioned in The Below Task. 1. (A)Rohan KhareNo ratings yet
- DYS 2 - Discover Ultimate Genius (DYS2021 Ver1.0)Document32 pagesDYS 2 - Discover Ultimate Genius (DYS2021 Ver1.0)Vaishali TiwariNo ratings yet
- Group1 ThermodynamicsDocument4 pagesGroup1 ThermodynamicsMICHAEL ANGELO BRUFALNo ratings yet
- 4 Bar Mechanism PDFDocument3 pages4 Bar Mechanism PDFSagar Dutt MathurNo ratings yet
- Design of Elastomeric Bearing System and AnalysisDocument11 pagesDesign of Elastomeric Bearing System and Analysisabdelrahman emadNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument33 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasSri DNo ratings yet
- Optimization of Freeze DryingDocument29 pagesOptimization of Freeze DryingAjeet SinghNo ratings yet
- 06 Chapter 7 - Lateral Earth Pressure-M PDFDocument62 pages06 Chapter 7 - Lateral Earth Pressure-M PDFogeboy sangcopanNo ratings yet
- 02whole PDFDocument256 pages02whole PDFkhyatichavdaNo ratings yet
- PhysicsDocument4 pagesPhysicsramanagopalNo ratings yet
- Final Exam Questions #7 - EMWDocument3 pagesFinal Exam Questions #7 - EMWanonslu2012No ratings yet
- Impacts of HVDC Lines On The Economics of HVDC ProjectsDocument149 pagesImpacts of HVDC Lines On The Economics of HVDC ProjectsArturo Isidro Conde Pérez0% (1)
- Modernisation of Cooling Towers in TPP Bitola-FinalDocument61 pagesModernisation of Cooling Towers in TPP Bitola-FinalОливер АндовскиNo ratings yet
- 1 02 PDFDocument16 pages1 02 PDFircivilcivilNo ratings yet
- Grade 11 Physics Module4Document81 pagesGrade 11 Physics Module4JohnRenzoMolinarNo ratings yet
- Exe Melting and BoilingDocument3 pagesExe Melting and BoilingKuan LoongNo ratings yet
- MATLAB: Rocket Launcher SimulationDocument4 pagesMATLAB: Rocket Launcher SimulationAhsan NaeemNo ratings yet
- FSI Residential Eng Ind - Bifacial Update Approved-NewDocument83 pagesFSI Residential Eng Ind - Bifacial Update Approved-NewDedy KcpNo ratings yet
- Chapter 7 Passive DevicesDocument72 pagesChapter 7 Passive DevicessvijiNo ratings yet
- Comparative Review On Conventional and Recently Developed Perforated Fins For Heat Transfer EnhancementDocument16 pagesComparative Review On Conventional and Recently Developed Perforated Fins For Heat Transfer EnhancementEdy geardoNo ratings yet