You might also like
- CCTV Camera Hack With Google Dork ListDocument3 pagesCCTV Camera Hack With Google Dork ListsarahdianewhalenNo ratings yet
- Inspection and Maintenance of Drillpipe Ebook PDFDocument39 pagesInspection and Maintenance of Drillpipe Ebook PDFAntónio OliveiraNo ratings yet
- Write Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersDocument9 pagesWrite Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersLexi TronicsNo ratings yet
- Submitted By:saransh AgrawalDocument20 pagesSubmitted By:saransh AgrawalSaransh AgrawalNo ratings yet
- Process Thermodynamic Steam Trap PDFDocument9 pagesProcess Thermodynamic Steam Trap PDFhirenkumar patelNo ratings yet
- Types of GearsDocument6 pagesTypes of GearsSantosh GoudarNo ratings yet
- Proposal - SOLAR POWERED LED STREET LIGHTINGDocument8 pagesProposal - SOLAR POWERED LED STREET LIGHTINGshanmugaraja85No ratings yet
- Sample Street Light Report 2 PDFDocument58 pagesSample Street Light Report 2 PDFApoorva v Hejjaji100% (1)
- Design and Development of Single Axis Solar Tracking System Using C8051F120 (CYGNAL) MicrocontrollerDocument8 pagesDesign and Development of Single Axis Solar Tracking System Using C8051F120 (CYGNAL) MicrocontrollerarcherselevatorsNo ratings yet
- 12 Fa02Document4 pages12 Fa02corsovaNo ratings yet
- Ansys WB Fatigue AnalysisDocument81 pagesAnsys WB Fatigue Analysisprajash007100% (1)
- Intelligent Solar Tracker System Implemented On 8051 MicrocontrollerDocument5 pagesIntelligent Solar Tracker System Implemented On 8051 MicrocontrollerseventhsensegroupNo ratings yet
- Research and Design of A Smart Home System Based On Raindrop SensorDocument4 pagesResearch and Design of A Smart Home System Based On Raindrop Sensorjeriosc798No ratings yet
- Datasheet - MLX75308 FINAL Rev3Document76 pagesDatasheet - MLX75308 FINAL Rev3Omar Rosas SalasNo ratings yet
- Intelligent Street Lighting System Using GSMDocument9 pagesIntelligent Street Lighting System Using GSMSuweb RezaNo ratings yet
- Auto Intensity Control of Street Lights Lab ReportDocument26 pagesAuto Intensity Control of Street Lights Lab ReportUsama SagharNo ratings yet
- Audio Announcement For Library Based On Sound Level MeterDocument17 pagesAudio Announcement For Library Based On Sound Level Meterkunalgourav02No ratings yet
- BodyDocument18 pagesBodyAditya RajNo ratings yet
- Street Light Intensity Control by Detecting Vehicle Movement Aniket A. Sonkusare, Pravin K. Umate, Pooja K. Patki Prof. Mrs. Padmini G. KaushikDocument7 pagesStreet Light Intensity Control by Detecting Vehicle Movement Aniket A. Sonkusare, Pravin K. Umate, Pooja K. Patki Prof. Mrs. Padmini G. KaushikSuhana SharmaNo ratings yet
- Kamaraj Solarstreetlight ProposalDocument7 pagesKamaraj Solarstreetlight ProposalsaiarvinthNo ratings yet
- ProjectDocument52 pagesProjectpankajNo ratings yet
- Keywords:: Sensor Network Monitoring System Design Based On Solar Energy" Is Designed and Developed ToDocument5 pagesKeywords:: Sensor Network Monitoring System Design Based On Solar Energy" Is Designed and Developed ToagnisaranNo ratings yet
- Arduino Based Solar Tracking SystemDocument30 pagesArduino Based Solar Tracking SystemPandey NeetaNo ratings yet
- b20 Iot Based Energy Efficient Smart Strteet Lightning Technique With Air Quality MonitorngDocument31 pagesb20 Iot Based Energy Efficient Smart Strteet Lightning Technique With Air Quality Monitorngkalemula sahithiNo ratings yet
- Iot Based Intelligent Traffic Control System: International Journal of Engineering Technology Research & ManagementDocument5 pagesIot Based Intelligent Traffic Control System: International Journal of Engineering Technology Research & ManagementExam2 CSENo ratings yet
- Arduino Project: Smart Irrigation SystemDocument13 pagesArduino Project: Smart Irrigation SystemAleeza AnjumNo ratings yet
- Major ProjectDocument5 pagesMajor ProjectPatil SuryakantNo ratings yet
- Smart Street Light Control SystemDocument5 pagesSmart Street Light Control SystemSunny GaikwadNo ratings yet
- Microprocessor Electronics ProjectDocument52 pagesMicroprocessor Electronics ProjectugeshNo ratings yet
- Project Proposal On Street Light Management System Using IOTDocument7 pagesProject Proposal On Street Light Management System Using IOTsnehal kambleNo ratings yet
- Car Automation System (Adaptive Lighting System)Document41 pagesCar Automation System (Adaptive Lighting System)Harika AchantaNo ratings yet
- Chapter One 1.1 BackgroundDocument10 pagesChapter One 1.1 BackgroundantehenNo ratings yet
- An Embedded System Design in Automation of Street Lights Using Atmega 8535l MicrocontrollerDocument8 pagesAn Embedded System Design in Automation of Street Lights Using Atmega 8535l MicrocontrollerMani SekarNo ratings yet
- Mini Project ReportDocument9 pagesMini Project ReportShiekh LafeezNo ratings yet
- Automatic Street Light Operating SystemDocument4 pagesAutomatic Street Light Operating SystemAnonymous kw8Yrp0R5rNo ratings yet
- Project IGIDocument106 pagesProject IGIPawan Wagh PatilNo ratings yet
- M.Siva Prasadu Reddy: Submitted byDocument18 pagesM.Siva Prasadu Reddy: Submitted bySai AdithyaNo ratings yet
- Automatic Street Light Control System Using WSN Based On Vehicle Movement and Atmospheric ConditionDocument8 pagesAutomatic Street Light Control System Using WSN Based On Vehicle Movement and Atmospheric Conditionsurendar147No ratings yet
- Automatic Highway Lighting and Accident Detection SystemDocument12 pagesAutomatic Highway Lighting and Accident Detection SystemNouman KhalidNo ratings yet
- Smart Street Lighting Using Embedded SystemsDocument6 pagesSmart Street Lighting Using Embedded SystemsVedant PrustyNo ratings yet
- Street Light That Glows On Detecting Vehicle Movement Using SolarDocument4 pagesStreet Light That Glows On Detecting Vehicle Movement Using SolarManish KhaliaNo ratings yet
- Iot Solar Power Monitoring SystemDocument6 pagesIot Solar Power Monitoring SystemSSReddy100% (1)
- Garden AutomationDocument54 pagesGarden AutomationNagraj Tondchore100% (3)
- Density Based Street LightDocument27 pagesDensity Based Street LightSwetha Bomma0% (1)
- On Field Monitoring and Control of PolyhouseDocument4 pagesOn Field Monitoring and Control of PolyhouseEditor IJRITCCNo ratings yet
- Vehicle Movement Street Light with Light Sensing AtmegaDocument5 pagesVehicle Movement Street Light with Light Sensing AtmegaBhavana N SNo ratings yet
- Sep PPTDocument13 pagesSep PPTKrishna Sri Kumar Lanka (Kittu)No ratings yet
- Smart Dust Full ReportDocument26 pagesSmart Dust Full ReportRavinder KumarNo ratings yet
- Main Project AbstractDocument6 pagesMain Project AbstractKeerthi KeethuNo ratings yet
- Design of PLC Based Tracking System To Maximize Solar Energy ConversionDocument5 pagesDesign of PLC Based Tracking System To Maximize Solar Energy ConversionMario StrašniNo ratings yet
- I.T.S Engineering College: Seminar On Density Based Traffic Light ControlDocument23 pagesI.T.S Engineering College: Seminar On Density Based Traffic Light ControlJasneet Sethi100% (2)
- Paper Zigbee Based Intelligent Tunnel Lighting System-1!05!2015-FinalDocument6 pagesPaper Zigbee Based Intelligent Tunnel Lighting System-1!05!2015-FinalManoj KavediaNo ratings yet
- Content (6 Copies)Document45 pagesContent (6 Copies)Venkatesh NANo ratings yet
- (IJET-V1I2P11) Authors :abdul Latif Saleem, Raja Sagar R, Sachin Datta N S, Sachin H S, Usha M SDocument4 pages(IJET-V1I2P11) Authors :abdul Latif Saleem, Raja Sagar R, Sachin Datta N S, Sachin H S, Usha M SInternational Journal of Engineering and TechniquesNo ratings yet
- Street Light Monitor and Control System Synopsis-1Document8 pagesStreet Light Monitor and Control System Synopsis-1muskan sNo ratings yet
- Design and Implementation of Environment Sensing System Based On Gsm/Gprs Using Embedded Controlled Sensor NetworkDocument4 pagesDesign and Implementation of Environment Sensing System Based On Gsm/Gprs Using Embedded Controlled Sensor Networksamsath10No ratings yet
- Event ManagementDocument4 pagesEvent ManagementSwami KshatriyaNo ratings yet
- Street Light Glow On Detecting Vechile Movement Using SensorDocument3 pagesStreet Light Glow On Detecting Vechile Movement Using SensorNikhil BhatiNo ratings yet
- Rain SensorsDocument2 pagesRain SensorsmjdeshpandeNo ratings yet
- 7817-Article Text-14082-1-10-20210531Document6 pages7817-Article Text-14082-1-10-20210531thebuddhijivi01No ratings yet
- Fuzzy Controller Design Using FPGA For Sun Tracking in Solar Array SystemDocument7 pagesFuzzy Controller Design Using FPGA For Sun Tracking in Solar Array SystemDavidleonardo GalindoNo ratings yet
- Automated Greenhouse Monitoring and Control System PDFDocument9 pagesAutomated Greenhouse Monitoring and Control System PDFSaiKrishna100% (2)
- Ultra Low Power Wireless Weather StationDocument6 pagesUltra Low Power Wireless Weather Stationwahyuthp43No ratings yet
- STREETLIGHT CONTROL SYSTEM FOR ENERGY SAVINGSDocument8 pagesSTREETLIGHT CONTROL SYSTEM FOR ENERGY SAVINGSSyed Hamza Ibrar ShahNo ratings yet
- Embedded Based Industrial Security System With Auto DialerDocument49 pagesEmbedded Based Industrial Security System With Auto DialermdayyubNo ratings yet
- I ST IA FTDocument2 pagesI ST IA FTSantosh GoudarNo ratings yet
- 670205Document9 pages670205Santosh GoudarNo ratings yet
- Alva'S Institute of Engineering and Technology Department of Mechanical Enginrring I' Engineering (10EME24)Document1 pageAlva'S Institute of Engineering and Technology Department of Mechanical Enginrring I' Engineering (10EME24)Santosh GoudarNo ratings yet
- Manohar Pattar:: Sankappa::::: 1 Year Bachelor in Education (B.Ed) 110068 2011 100991119 72.00 PassedDocument2 pagesManohar Pattar:: Sankappa::::: 1 Year Bachelor in Education (B.Ed) 110068 2011 100991119 72.00 PassedSantosh GoudarNo ratings yet
- Microstructure and Mechanical Properties of Spray Deposited Hypoeutectic Al-Si AlloyDocument4 pagesMicrostructure and Mechanical Properties of Spray Deposited Hypoeutectic Al-Si AlloySantosh GoudarNo ratings yet
- ECE Lab Internal MarksDocument3 pagesECE Lab Internal MarksSantosh GoudarNo ratings yet
- Squeeze CastingDocument27 pagesSqueeze CastingSantosh GoudarNo ratings yet
- Mechanics of Materials VTU Exam Questions 2007-2014Document2 pagesMechanics of Materials VTU Exam Questions 2007-2014Santosh GoudarNo ratings yet
- 1sqezze Cast3Document8 pages1sqezze Cast3Santosh GoudarNo ratings yet
- Receipt 888903009283Document1 pageReceipt 888903009283Santosh GoudarNo ratings yet
- ClutchesDocument5 pagesClutchesSantosh GoudarNo ratings yet
- Alva'S Institute of Engineering and Technology Department of Mechanical EngineeringDocument1 pageAlva'S Institute of Engineering and Technology Department of Mechanical EngineeringSantosh GoudarNo ratings yet
- ECE Lab Internal MarksDocument3 pagesECE Lab Internal MarksSantosh GoudarNo ratings yet
- 10me53 - Energy EngineeringDocument3 pages10me53 - Energy EngineeringSantosh GoudarNo ratings yet
- CH 3sDocument67 pagesCH 3sSantosh GoudarNo ratings yet
- Block Diagram of 8085.PDF ImpDocument32 pagesBlock Diagram of 8085.PDF ImpKRISHNAVINODNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentSantosh GoudarNo ratings yet
- CRV 2Document1 pageCRV 2Santosh GoudarNo ratings yet
- 3rd To 7th Sem Master TimeTableDocument8 pages3rd To 7th Sem Master TimeTableSantosh GoudarNo ratings yet
- Thermal Energy 12202Document45 pagesThermal Energy 12202Santosh GoudarNo ratings yet
- Request For Original Marks Card1Document1 pageRequest For Original Marks Card1Santosh GoudarNo ratings yet
- 3 D ElasticityDocument40 pages3 D ElasticitySantosh GoudarNo ratings yet
- Final Manual Edited PramodDocument37 pagesFinal Manual Edited PramodSantosh GoudarNo ratings yet
- The IC EngineDocument14 pagesThe IC EngineShyamendra KushwahaNo ratings yet
- Gate 2013 SyllabusDocument2 pagesGate 2013 SyllabusSantosh GoudarNo ratings yet
- IEEE Paper FormatDocument4 pagesIEEE Paper Formattejas24No ratings yet
- 4al10cv041 Shahanas TDocument1 page4al10cv041 Shahanas TSantosh GoudarNo ratings yet
- DC Motor Direction Control ReportDocument6 pagesDC Motor Direction Control ReportEngr Farhanullah SarkiNo ratings yet
- SE01 SE04 SE03 SE02 E14 E13: As BuiltDocument1 pageSE01 SE04 SE03 SE02 E14 E13: As BuiltgenricNo ratings yet
- Oracle Database Question Bank 1Document5 pagesOracle Database Question Bank 1subbaraomca2010No ratings yet
- Industrial HygieneDocument31 pagesIndustrial HygieneGautam SharmaNo ratings yet
- Dsd-060 Earthquake Shutdown Unit: DescriptionDocument2 pagesDsd-060 Earthquake Shutdown Unit: Descriptionmuhammad arifNo ratings yet
- Industry 4.0 FinaleDocument25 pagesIndustry 4.0 FinaleFrame UkirkacaNo ratings yet
- Human Plus Machine A New Era of Automation in ManufacturingDocument8 pagesHuman Plus Machine A New Era of Automation in ManufacturingDuarte CRosaNo ratings yet
- An70983 001-70983Document24 pagesAn70983 001-70983अमरेश झाNo ratings yet
- Vantio CacheServe 7.2.0 Administrators Manual 20161208 PDFDocument577 pagesVantio CacheServe 7.2.0 Administrators Manual 20161208 PDFPaulette Servin100% (1)
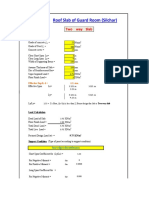
- Roof Slab of Guard RoomDocument3 pagesRoof Slab of Guard RoomAditya KumarNo ratings yet
- PERFAPPRAISAL Research proposal on performance appraisal practices at National Bank of Pakistan and United Bank LimitedDocument4 pagesPERFAPPRAISAL Research proposal on performance appraisal practices at National Bank of Pakistan and United Bank LimitedNadia KhanNo ratings yet
- Allcargo Corporate BrochureDocument12 pagesAllcargo Corporate BrochureallinonecargologisticsNo ratings yet
- Template Icme 13 PosterDocument1 pageTemplate Icme 13 PosterZulma Xiomara Rueda GarciaNo ratings yet
- Aesculap: F E S SDocument28 pagesAesculap: F E S SEcole AcharafNo ratings yet
- Pivot Part NumDocument2 pagesPivot Part Numrossini_danielNo ratings yet
- Week 2 PlanDocument3 pagesWeek 2 Planapi-427127204No ratings yet
- The hyperwall: A multiple display wall for visualizing high-dimensional dataDocument4 pagesThe hyperwall: A multiple display wall for visualizing high-dimensional dataMahendra PututNo ratings yet
- Documentation of Xabe - FFmpegDocument11 pagesDocumentation of Xabe - FFmpegTomasz ŻmudaNo ratings yet
- Safety Training Evaluation Form: Instructor RatingDocument1 pageSafety Training Evaluation Form: Instructor RatingNate JamesNo ratings yet
- G12gasa Group5 PR2Document7 pagesG12gasa Group5 PR2Lizley CordovaNo ratings yet
- OD Main Switch & OD OFF Indicator Light CircuitDocument4 pagesOD Main Switch & OD OFF Indicator Light Circuitcelestino tuliaoNo ratings yet
- OceanPixel Abundo Marine Renewable Energy An Emerging OptionDocument96 pagesOceanPixel Abundo Marine Renewable Energy An Emerging OptionjopaypagasNo ratings yet
- PJ1117CM-2 5VDocument6 pagesPJ1117CM-2 5VАлексей ГомоновNo ratings yet
- Manuel Solaris Ccds1425-St Ccds1425-Dn Ccds1425-Dnx Ccds1425-Dn36en deDocument42 pagesManuel Solaris Ccds1425-St Ccds1425-Dn Ccds1425-Dnx Ccds1425-Dn36en deAllegra AmiciNo ratings yet
- Oracle Baseline Security ChecklistDocument15 pagesOracle Baseline Security ChecklistChidi OkerekeNo ratings yet