You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 4.failure Theories and Stress ConcentrationsDocument21 pages4.failure Theories and Stress ConcentrationsAmr El SaeedNo ratings yet
- AIR Modeller 75 2017-12-20 - 01Document68 pagesAIR Modeller 75 2017-12-20 - 01JoãoGilbertoAraújoPontes100% (4)
- Concrete Pipe Installation Guide-CPMDocument17 pagesConcrete Pipe Installation Guide-CPMSankar CdmNo ratings yet
- SAS Certification Practice Exam - Base ProgrammingDocument18 pagesSAS Certification Practice Exam - Base ProgrammingArvind Shukla100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- GuidewireClaimCenter Performance TestPlanDocument18 pagesGuidewireClaimCenter Performance TestPlanshanthan117No ratings yet
- Astrology & Palmistry Vol 1Document42 pagesAstrology & Palmistry Vol 1cristina_agopian100% (3)
- Fire Drencher System - Base-Engineer PDFDocument2 pagesFire Drencher System - Base-Engineer PDFpequenita34100% (1)
- Why and Wherefores of Power System BlackoutsDocument6 pagesWhy and Wherefores of Power System BlackoutsmentongNo ratings yet
- CSSGB Insert 2013Document12 pagesCSSGB Insert 2013VinothKumarDhananjayanNo ratings yet
- Green Bro 1213Document2 pagesGreen Bro 1213Subba Rav SingamsettyNo ratings yet
- Whats NewDocument282 pagesWhats NewArvind ShuklaNo ratings yet
- Quiz Results For Certification Practice ExamDocument29 pagesQuiz Results For Certification Practice ExamArvind Shukla100% (1)
- Forecasting Models: Chapter Guide. in Decision Making, We Deal With Devising Future Plans. The Data deDocument10 pagesForecasting Models: Chapter Guide. in Decision Making, We Deal With Devising Future Plans. The Data deHKNo ratings yet
- Markovian Decision Process: Chapter Guide. This Chapter Applies Dynamic Programming To The Solution of A StochasDocument20 pagesMarkovian Decision Process: Chapter Guide. This Chapter Applies Dynamic Programming To The Solution of A StochasAnupam KumarNo ratings yet
- CH 22Document11 pagesCH 22Arvind ShuklaNo ratings yet
- App EDocument37 pagesApp EmanaskanukurthiNo ratings yet
- Review vectors matrices appendicesDocument16 pagesReview vectors matrices appendicesArvind ShuklaNo ratings yet
- 8201 Stochastic Dominance Rules For ProductDocument12 pages8201 Stochastic Dominance Rules For ProductArvind ShuklaNo ratings yet
- Excel Shortcuts 2014 PDFDocument7 pagesExcel Shortcuts 2014 PDFKaranam Attur VenkateshNo ratings yet
- Preliminary Pin-out for 12 Cylinder Engine Control UnitDocument6 pagesPreliminary Pin-out for 12 Cylinder Engine Control UnitSUELENNo ratings yet
- UDR MANUFACTURE ManufacturesDocument8 pagesUDR MANUFACTURE ManufacturesQuadri Consultancy ServicesNo ratings yet
- What Is AmplifierDocument18 pagesWhat Is AmplifierEbayLunaNo ratings yet
- (Mamoru Hosaka (Auth.) ) Modeling of Curves and SuDocument363 pages(Mamoru Hosaka (Auth.) ) Modeling of Curves and Suamalendu_biswas_1No ratings yet
- Theory of Metal Cutting-Module 1Document116 pagesTheory of Metal Cutting-Module 1rejeesh_rajendranNo ratings yet
- The NT Insider: Writing Filters Is Hard WorkDocument32 pagesThe NT Insider: Writing Filters Is Hard WorkOveja NegraNo ratings yet
- HW03 5ad S19 PDFDocument2 pagesHW03 5ad S19 PDFbobNo ratings yet
- c600 17lookinsideDocument6 pagesc600 17lookinsideИван МинчевNo ratings yet
- Chapter 15. Applications of Integration: Exercises 15.2Document2 pagesChapter 15. Applications of Integration: Exercises 15.2Donghyun AhnNo ratings yet
- Sectional Results: Sofistik 2020Document28 pagesSectional Results: Sofistik 2020ec05226No ratings yet
- Windmill ABB MachinesDocument6 pagesWindmill ABB MachinesRadu BabauNo ratings yet
- CRCM Manual 2 9 16Document33 pagesCRCM Manual 2 9 16Kamagara Roland AndrewNo ratings yet
- Dual Band Mobile Phone Service ManualDocument40 pagesDual Band Mobile Phone Service Manualأبو عبد الرحمان زهيرNo ratings yet
- P1125P1/P1250E1: Output RatingsDocument6 pagesP1125P1/P1250E1: Output Ratingsmohsen_cumminsNo ratings yet
- Canusa GTS - 3LPEDocument2 pagesCanusa GTS - 3LPEarifin rizalNo ratings yet
- EURAMET Cg-2 V 2.0 Calibration of Gauge Block ComparatorsDocument9 pagesEURAMET Cg-2 V 2.0 Calibration of Gauge Block ComparatorsRicarditoNo ratings yet
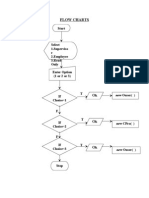
- Flow Charts Option: StartDocument13 pagesFlow Charts Option: StartbalabooksNo ratings yet
- 625-NR Consolidated NovemberDocument321 pages625-NR Consolidated NovemberArturoNo ratings yet
- PilotstarD AP02-S01 Mar09Document168 pagesPilotstarD AP02-S01 Mar09Dharan NarayananNo ratings yet
- MMMDocument1 pageMMMkhan22imranNo ratings yet
- 70005144e 1314001 PDFDocument501 pages70005144e 1314001 PDFLuis FernandoNo ratings yet
- Catalogo - CATUDocument132 pagesCatalogo - CATUxis-zeroNo ratings yet
- Electric Electronics BrochureDocument8 pagesElectric Electronics BrochurejolualNo ratings yet
- Avio 550 Max ICP-OES ASTM D5185 In-Service Oils Application NoteDocument4 pagesAvio 550 Max ICP-OES ASTM D5185 In-Service Oils Application Notec1nthiacruzNo ratings yet