You might also like
- Industrial Control Syllabus PDFDocument2 pagesIndustrial Control Syllabus PDF287 JatinNo ratings yet
- Kaizen PrinciplesDocument42 pagesKaizen PrinciplesRaj100% (2)
- 2A016 Install Rev1972 1965Document40 pages2A016 Install Rev1972 1965Rich McDonaldNo ratings yet
- Introduction to MechatronicsDocument5 pagesIntroduction to MechatronicsNATID tubeNo ratings yet
- Mechatronic Systems Design: Mohammed AhmedDocument54 pagesMechatronic Systems Design: Mohammed AhmedShivam Kumar ShrivastavaNo ratings yet
- Mechatronics ME5007Document5 pagesMechatronics ME5007Kalum ChandraNo ratings yet
- 1 - Proceso de Diseño MecatrónicoDocument54 pages1 - Proceso de Diseño MecatrónicoJosueNo ratings yet
- Introduction To Mechatronics SystemDocument8 pagesIntroduction To Mechatronics SystemSomalia WadankeygaNo ratings yet
- Mechatronics: by Ajay Kumar VermaDocument17 pagesMechatronics: by Ajay Kumar VermaAjay VermaNo ratings yet
- FACULTY OF LAW PAST QUESTIONS 2019 2020 Till Date. (Compiled by Ola of Canada)Document12 pagesFACULTY OF LAW PAST QUESTIONS 2019 2020 Till Date. (Compiled by Ola of Canada)Ibidun TobiNo ratings yet
- Introduction To MechatronicsDocument19 pagesIntroduction To Mechatronicsanshjaiswal679No ratings yet
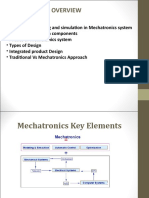
- Key Elements of MechatronicsDocument14 pagesKey Elements of Mechatronicsmatininamdar50% (2)
- Course Outline PDFDocument5 pagesCourse Outline PDFbukhariNo ratings yet
- Notes MechaDocument41 pagesNotes MechaashNo ratings yet
- LEC 02 - 03 Mechatronics Systems and ApplicationsDocument24 pagesLEC 02 - 03 Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- Mechatronic System Design Course OverviewDocument21 pagesMechatronic System Design Course OverviewSaravanakumardevarajNo ratings yet
- Unit 1 INTRODUCTION TO MECHATRONICS SYSTEM DESIGNDocument8 pagesUnit 1 INTRODUCTION TO MECHATRONICS SYSTEM DESIGN9740177035100% (1)
- Mechatronics Design ProcessDocument7 pagesMechatronics Design Processapve3248No ratings yet
- 259 - Lecturer NotvfvvervrevDocument81 pages259 - Lecturer NotvfvvervrevBijay KumarNo ratings yet
- Mechatronic Design ApproachDocument49 pagesMechatronic Design ApproachRaghulNo ratings yet
- Course - Introduction For MechatronicsdDocument15 pagesCourse - Introduction For MechatronicsdMatthew SimeonNo ratings yet
- Modelling Physical Systems for Designing Mechatronic SystemsDocument56 pagesModelling Physical Systems for Designing Mechatronic SystemsKhristilera RodriguezNo ratings yet
- MEM 355 Performance Enhancement of Dynamical Systems: Introduction To Control System DesignDocument26 pagesMEM 355 Performance Enhancement of Dynamical Systems: Introduction To Control System DesignmarbonfNo ratings yet
- Introduction to Mechatronics at ASTUDocument52 pagesIntroduction to Mechatronics at ASTUabdulkerim seid100% (1)
- C2000 MCU Real-Time Industrial Control TrainingDocument4 pagesC2000 MCU Real-Time Industrial Control TrainingPhạm Văn TưởngNo ratings yet
- Fmem - Unit VDocument57 pagesFmem - Unit VBodhi SealNo ratings yet
- LEC 06 - 07 Mechatronics Systems and ApplicationsDocument26 pagesLEC 06 - 07 Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- Contact Details: Name: Dr. Srinivasa Rao P Office: 17-03-02 Phone: 05-368 7207 Email: Srinivasa - Pedapati@utp - Edu.myDocument45 pagesContact Details: Name: Dr. Srinivasa Rao P Office: 17-03-02 Phone: 05-368 7207 Email: Srinivasa - Pedapati@utp - Edu.myRetneshwaaran GanesanNo ratings yet
- ME 475 Mechatronics: Semester: July 2015Document22 pagesME 475 Mechatronics: Semester: July 2015ফারহান আহমেদ আবীরNo ratings yet
- Design of Mechatronics System ModelingDocument14 pagesDesign of Mechatronics System ModelingChandni DayakarNo ratings yet
- System Modeling: PRESSENTED BY:-Er. Saurabh MalpotraDocument36 pagesSystem Modeling: PRESSENTED BY:-Er. Saurabh MalpotraCr ZyNo ratings yet
- Unit-5 MechatronicsDocument34 pagesUnit-5 Mechatronicsrudrav3210No ratings yet
- LEC 08-10 - Mechatronics Systems and ApplicationsDocument29 pagesLEC 08-10 - Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- Eee 481 2015Document2 pagesEee 481 2015Bhavna MuthyalaNo ratings yet
- Unit 5Document5 pagesUnit 5CAD With RaoNo ratings yet
- Multidisciplinary Undergraduate Mechatronic ExperimentsDocument4 pagesMultidisciplinary Undergraduate Mechatronic Experimentstamann2004No ratings yet
- 6565 Ijmme Ijens PDFDocument17 pages6565 Ijmme Ijens PDFعلي كامل الاسديNo ratings yet
- BMMI Unit 1 - Session 1Document18 pagesBMMI Unit 1 - Session 1Yashi SinghNo ratings yet
- MECHATRONICSDocument46 pagesMECHATRONICSGaura SaniNo ratings yet
- Unit 1Document184 pagesUnit 1KANISHKAR Hem SankarNo ratings yet
- Mechatronics Notes PDFDocument188 pagesMechatronics Notes PDFharish100% (1)
- 1.unit 1 MechatronicsDocument63 pages1.unit 1 MechatronicsSolcastic SoulNo ratings yet
- Active SuspensionDocument6 pagesActive SuspensionSandor CleganeNo ratings yet
- Chapter 1 - Introduction To Mechatronics Devices PDFDocument17 pagesChapter 1 - Introduction To Mechatronics Devices PDFsans gasterNo ratings yet
- Introduction Design of MechatronicsDocument45 pagesIntroduction Design of MechatronicsMuthu Sankar Dhoni100% (1)
- References: 1. Mechatronics System Design-Devdas Shetty and Richard Kolk 2. Mechatronics - W. Bolton 3. The Mechatronics Handbook - Robert H. BishopDocument30 pagesReferences: 1. Mechatronics System Design-Devdas Shetty and Richard Kolk 2. Mechatronics - W. Bolton 3. The Mechatronics Handbook - Robert H. BishopJay MenonNo ratings yet
- Mechatronics Lab Manual Module 1: Introduction to Mechatronics and CNC MachinesDocument105 pagesMechatronics Lab Manual Module 1: Introduction to Mechatronics and CNC Machineskbmn2No ratings yet
- Inverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyDocument6 pagesInverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyWan Nizam Wan SulaimanNo ratings yet
- ES2C6-15 Electromechanical System DesignDocument6 pagesES2C6-15 Electromechanical System DesignMesafint kassieNo ratings yet
- Mechatronics EngineeeringDocument20 pagesMechatronics EngineeeringN.SNo ratings yet
- Module 1 Part 1 Engine DynamicsDocument57 pagesModule 1 Part 1 Engine DynamicsTara GerdingNo ratings yet
- Mekatron01-Introduction To MechatronicsDocument55 pagesMekatron01-Introduction To MechatronicsBrian ArofianNo ratings yet
- Msme BE Mechanical Engineering 2019 Course Structure An 220719 101123-1Document5 pagesMsme BE Mechanical Engineering 2019 Course Structure An 220719 101123-1sonawanepmsNo ratings yet
- SYSC 3610 Biomedical Systems ModelingDocument4 pagesSYSC 3610 Biomedical Systems ModelingAshraf maghNo ratings yet
- MechatronicsDocument264 pagesMechatronicschandra shekharNo ratings yet
- 4E3 16 OutlineDocument5 pages4E3 16 OutlinevivianNo ratings yet
- Digital Control Sys SyllabusDocument3 pagesDigital Control Sys SyllabusAndre Silva0% (1)
- Mechatronics 1Document67 pagesMechatronics 1Syeda HusnaNo ratings yet
- MECHATRONICS Notes PDFDocument69 pagesMECHATRONICS Notes PDFsivakrishna nadakuduru100% (1)
- L1: Introduction To MechatronicsDocument38 pagesL1: Introduction To MechatronicsMaheshNo ratings yet
- Practical Control of Electric Machines: Model-Based Design and SimulationFrom EverandPractical Control of Electric Machines: Model-Based Design and SimulationNo ratings yet
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsFrom EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsNo ratings yet
- 10 en Sum PDFDocument11 pages10 en Sum PDFnikhilrane91_7522800No ratings yet
- 11/5/2012 Anju RanaDocument20 pages11/5/2012 Anju Ranan2oh1No ratings yet
- Optimizing Production Layout and Capacity Via FlexDocument9 pagesOptimizing Production Layout and Capacity Via Flexnikhilrane91_7522800No ratings yet
- Level Diagram Copy - May16Document4 pagesLevel Diagram Copy - May16nikhilrane91_7522800No ratings yet
- BocaDocument8 pagesBocanikhilrane91_7522800No ratings yet
- LayoutDocument8 pagesLayoutEng Mohamed EssamNo ratings yet
- Mata Uang Dunia PDFDocument36 pagesMata Uang Dunia PDFRekyan ShintaNo ratings yet
- 1 s2.0 S0305054802000746 MainDocument13 pages1 s2.0 S0305054802000746 Mainnikhilrane91_7522800No ratings yet
- KaizenDocument6 pagesKaizennikhilrane91_7522800No ratings yet
- KanbanDocument2 pagesKanbanvaib5No ratings yet
- Assembly Line Balancing - A Tool For Improving ProductivityDocument6 pagesAssembly Line Balancing - A Tool For Improving Productivityjgkonnully100% (1)
- Kanban Vs ScrumDocument41 pagesKanban Vs ScrumJayab JunkNo ratings yet
- Kaizen TQM Case Study ImportantDocument53 pagesKaizen TQM Case Study ImportantJustin ChanNo ratings yet
- Just-In-Time ManufacturingDocument63 pagesJust-In-Time ManufacturingNovi Wahyu WulandariNo ratings yet
- Getting Started with Kanban: Map Workflow & Visualize WIPDocument19 pagesGetting Started with Kanban: Map Workflow & Visualize WIPCristian Alecu100% (1)
- Supplier Evaluation - The First Steps For Effective SourcingDocument10 pagesSupplier Evaluation - The First Steps For Effective Sourcingimroz_ali90No ratings yet
- Facility Layout OptimizationDocument28 pagesFacility Layout Optimizationnikhilrane91_7522800No ratings yet
- Small Scale BiodieselDocument21 pagesSmall Scale BiodieselAdil KhanNo ratings yet
- Cooperative Feasibility Study GuideDocument31 pagesCooperative Feasibility Study GuideRegie AtienzaNo ratings yet
- Venkataramanan - Criteria Weightage MatricesDocument6 pagesVenkataramanan - Criteria Weightage Matricesnikhilrane91_7522800No ratings yet
- Assembly Line BalancingDocument11 pagesAssembly Line BalancingAnonymous zQMzqJKNo ratings yet
- Ultramarine Blue PigmentDocument9 pagesUltramarine Blue Pigmentnikhilrane91_7522800No ratings yet
- Sensor Network-OverviewDocument24 pagesSensor Network-OverviewSumit Nandi100% (1)
- Reinvent Ex3 1238263608Document3 pagesReinvent Ex3 1238263608nikhilrane91_7522800No ratings yet
- RFQ Terms ConditionsDocument22 pagesRFQ Terms Conditionsrohit_nayyar@hotmail.comNo ratings yet
- Procedure Ext - Proj19sept2011Document1 pageProcedure Ext - Proj19sept2011Venkitaraj Koneril PurushothamanNo ratings yet
- Indian Institute of Technology Guwahati: International Internship/Academic Ex Change Under Mou at Iit Guwaha Ti !!!Document1 pageIndian Institute of Technology Guwahati: International Internship/Academic Ex Change Under Mou at Iit Guwaha Ti !!!nikhilrane91_7522800No ratings yet
- LVDT BasicDocument4 pagesLVDT Basicวิรัตน์ พ่อไทเกอร์No ratings yet
- Indian Institute of Technology Guwahati: Internship/Academic Exchange Under M Ou at IIT Guwahati !!!Document1 pageIndian Institute of Technology Guwahati: Internship/Academic Exchange Under M Ou at IIT Guwahati !!!nikhilrane91_7522800No ratings yet
- Titrimetry (anEm'pnmQwQy)Document102 pagesTitrimetry (anEm'pnmQwQy)AchindA FernandoNo ratings yet
- ACI - Measurement of Properties of Fiber Reinforced ConcreteDocument12 pagesACI - Measurement of Properties of Fiber Reinforced ConcreteTran Tuan Kiet100% (1)
- ABB Digital Substation - Presentation - Apr 2017 - ANIMP PDFDocument29 pagesABB Digital Substation - Presentation - Apr 2017 - ANIMP PDFMohsin ElgondiNo ratings yet
- Optical Splitter Whitepaper - 02Document16 pagesOptical Splitter Whitepaper - 02s_waqarNo ratings yet
- CE 481 Solid Waste & Environmental PollutionDocument140 pagesCE 481 Solid Waste & Environmental PollutionDamini ThakurNo ratings yet
- MAT421Document5 pagesMAT421Amirul IqbaNo ratings yet
- Engineering Statistics and Probability Chapter 3 PDFDocument25 pagesEngineering Statistics and Probability Chapter 3 PDFcarl domingoNo ratings yet
- Micro Diaphragm Gas Sampling Pumps: Operating and Installation InstructionsDocument12 pagesMicro Diaphragm Gas Sampling Pumps: Operating and Installation Instructionssunilsheelavant100% (1)
- Extraction in Chemical Technology PrincipleDocument24 pagesExtraction in Chemical Technology PrincipleFatima ZaharaNo ratings yet
- Chapter 3 - Vectors and Coordinate Systems - SolutionsDocument7 pagesChapter 3 - Vectors and Coordinate Systems - SolutionsJeff BEzosNo ratings yet
- Liebherr Hs DimensionsDocument12 pagesLiebherr Hs DimensionsLiebherrNo ratings yet
- Coal Carbonization: Current and Future ApplicationsDocument9 pagesCoal Carbonization: Current and Future ApplicationsVenkata Krishnan RamanujamNo ratings yet
- Test 1Document12 pagesTest 1Harminder SanghaNo ratings yet
- Soundness TestDocument4 pagesSoundness TestC-one Goncalves100% (2)
- HW1 - Conditions - Olevsky - Mech - Beh - Mater PDFDocument2 pagesHW1 - Conditions - Olevsky - Mech - Beh - Mater PDFwangbutt123No ratings yet
- Matrices and Linear Systems: Matrix AlgebraDocument11 pagesMatrices and Linear Systems: Matrix AlgebraPavirlene Escaño NorteNo ratings yet
- Nioec SP 00 89 (R0) (Ed1)Document8 pagesNioec SP 00 89 (R0) (Ed1)aminNo ratings yet
- ShieldDocument5 pagesShieldMaan Valencia - RevillaNo ratings yet
- 2-Mark Questions Anna University Signals and SystemsDocument11 pages2-Mark Questions Anna University Signals and SystemsSonu100% (2)
- Prepared By: Ms. Ethel D. Nabor, LPTDocument29 pagesPrepared By: Ms. Ethel D. Nabor, LPTJohn Ralf T. TorrejosNo ratings yet
- b3 g1 Gummy Bear Launcher Written UpDocument6 pagesb3 g1 Gummy Bear Launcher Written Upapi-462982749No ratings yet
- Fracture Mechanics Study Compact Tension SpecimenDocument7 pagesFracture Mechanics Study Compact Tension SpecimencsmanienNo ratings yet
- Chemistry Project XIIDocument13 pagesChemistry Project XIIKanav MalhotraNo ratings yet
- Orientation of Students to Science TopicsDocument115 pagesOrientation of Students to Science TopicsShaynie Mhe Amar AntonioNo ratings yet
- Neuber Plasticity Correction R&O Material CurveUR2202Document1 pageNeuber Plasticity Correction R&O Material CurveUR2202Eduardo Javier Granados SanchezNo ratings yet
- The Philosophy of David Hume According to HumeDocument7 pagesThe Philosophy of David Hume According to HumePaul Kallan100% (1)
- Balancing Procedure Method - SKF ArticleDocument6 pagesBalancing Procedure Method - SKF ArticlebackvlackoNo ratings yet
- Weather CardDocument2 pagesWeather Cardmekstone100% (1)
- General MT Procedure - Rekind OffshoreDocument5 pagesGeneral MT Procedure - Rekind OffshoreNicko Arya Dharma100% (1)