You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Theory Manual Volume 1Document430 pagesTheory Manual Volume 1Dario Manrique GamarraNo ratings yet
- Composite Bonded Joints AnalysisDocument64 pagesComposite Bonded Joints Analysisjunjie yi100% (1)
- 1992 Roadway Design Manual Complete - Both Volumes ComprestDocument1,649 pages1992 Roadway Design Manual Complete - Both Volumes ComprestSekely FeycohNo ratings yet
- A New Technological Tool For Patching Asphalt PavementDocument45 pagesA New Technological Tool For Patching Asphalt PavementSekely FeycohNo ratings yet
- MATH 2433 400 Syllabus&Course PlanDocument7 pagesMATH 2433 400 Syllabus&Course PlanSekely FeycohNo ratings yet
- Homework #1 Taylor Series and Numerical DerivativesDocument2 pagesHomework #1 Taylor Series and Numerical DerivativesSekely FeycohNo ratings yet
- Spanish Minor RequirementsDocument1 pageSpanish Minor RequirementsSekely FeycohNo ratings yet
- Aashto CatalogDocument32 pagesAashto CatalogBilly ZárateNo ratings yet
- BERN1Document5 pagesBERN1srboghe651665No ratings yet
- Syllabus For Math 1823Document4 pagesSyllabus For Math 1823Sekely FeycohNo ratings yet
- Lecture 8Document10 pagesLecture 8Sekely FeycohNo ratings yet
- Lecture 8Document10 pagesLecture 8Sekely FeycohNo ratings yet
- MITRES 18 001 Guide8Document18 pagesMITRES 18 001 Guide8Sekely FeycohNo ratings yet
- MITRES 18 001 Guide8Document18 pagesMITRES 18 001 Guide8Sekely FeycohNo ratings yet
- Moment of A Force (With Worked Examples)Document5 pagesMoment of A Force (With Worked Examples)A BarrettNo ratings yet
- Wind Tunnel Notes PDFDocument173 pagesWind Tunnel Notes PDFaeronautical rajasNo ratings yet
- Aircraft Center of Mass AnalysisDocument18 pagesAircraft Center of Mass AnalysisOscar Oreste Salvador CarlosNo ratings yet
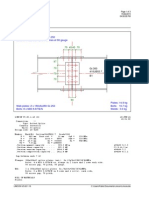
- Bolted splice design of 410UB53.7 beamDocument3 pagesBolted splice design of 410UB53.7 beamconorkellysligoNo ratings yet
- Unit Operation-1: Prepared By: Mukhtiar AliDocument12 pagesUnit Operation-1: Prepared By: Mukhtiar AliFarman AliNo ratings yet
- Djj3103: Strength of Materials Lab ReportDocument15 pagesDjj3103: Strength of Materials Lab ReportSyfull musicNo ratings yet
- PES TR17 Aeolian Vibration of Single Conductors Final 08 17 2015 PDFDocument38 pagesPES TR17 Aeolian Vibration of Single Conductors Final 08 17 2015 PDFFirstface LastbookNo ratings yet
- Sci8 Q1-M1 Laws of MotionDocument30 pagesSci8 Q1-M1 Laws of MotionPagudpud National HSNo ratings yet
- A350-40691 - Rev02 EN13000Document38 pagesA350-40691 - Rev02 EN13000Waleed LemsilkhiNo ratings yet
- Gear Drives Vs Belt DrivesDocument17 pagesGear Drives Vs Belt DrivesAaryan MahakalkarNo ratings yet
- Elastic Flexural Properties of Multistranded Stainless Steel Versus Conventional Nickel Titanium ArchwiresDocument8 pagesElastic Flexural Properties of Multistranded Stainless Steel Versus Conventional Nickel Titanium ArchwiresDiana Paola FontechaNo ratings yet
- Rotex SpecDocument30 pagesRotex SpecspringkimNo ratings yet
- Cam Mechanisms PackDocument28 pagesCam Mechanisms PackRongguang HanNo ratings yet
- 2 - FLDS 385 Chapter 2 Principles of HydraulicsDocument47 pages2 - FLDS 385 Chapter 2 Principles of HydraulicsAvneet MultaniNo ratings yet
- Steam TablesDocument16 pagesSteam TablesDanu MamlukatNo ratings yet
- Ensembles NotesDocument5 pagesEnsembles NotesParamita HaldarNo ratings yet
- Simple Harmonic Motion Multiple Choice 2013 07 11 PDFDocument4 pagesSimple Harmonic Motion Multiple Choice 2013 07 11 PDFYuusuf AhmedNo ratings yet
- CH 19Document21 pagesCH 19Sanjay Kumar100% (1)
- Time Domain Simulation of A Guitar Model and MethodDocument16 pagesTime Domain Simulation of A Guitar Model and MethodnemoNo ratings yet
- In A Sliding Pair Minimum Number of Degree of FreedomDocument15 pagesIn A Sliding Pair Minimum Number of Degree of FreedomanuanwarNo ratings yet
- Rigid Bodies Dinamic SolutionsDocument11 pagesRigid Bodies Dinamic SolutionsElle LawlietNo ratings yet
- Dynamics Model of A Four-Wheeled Mobile Robot For Control Applications - A Three-Case StudyDocument18 pagesDynamics Model of A Four-Wheeled Mobile Robot For Control Applications - A Three-Case StudyirhoNo ratings yet
- MEBS6008 Environmental Services II Fluid Network AnalysisDocument60 pagesMEBS6008 Environmental Services II Fluid Network Analysisahtin618No ratings yet
- Soda Can AnalysisDocument21 pagesSoda Can AnalysisYashwant RaoNo ratings yet
- Electric field of a uniformly charged diskDocument7 pagesElectric field of a uniformly charged diskJay ZillaNo ratings yet
- Friction and constrained motion problems from JEE Main objective questionsDocument24 pagesFriction and constrained motion problems from JEE Main objective questionsShuvanshu GuptaNo ratings yet
- Orbital Mechanics: Elliptical OrbitsDocument18 pagesOrbital Mechanics: Elliptical OrbitsDoaa KhaledNo ratings yet