You might also like
- Wing-Winglet Design Methodology For Low Speed ApplicationsDocument10 pagesWing-Winglet Design Methodology For Low Speed ApplicationsThiago Lins CostaNo ratings yet
- Lateral and Longitudinal Stability Analysis of UAV Using Xflr5-1163 PDFDocument5 pagesLateral and Longitudinal Stability Analysis of UAV Using Xflr5-1163 PDFAlexandraAndreeaNo ratings yet
- Aerodynamics of Tailless PlaneDocument2 pagesAerodynamics of Tailless Planemubeen imranNo ratings yet
- Airfoil DesignDocument18 pagesAirfoil Designapi-269373691No ratings yet
- Multhopp Method PDFDocument18 pagesMulthopp Method PDFsizzleNo ratings yet
- Holighaus - Thermalling EfficiencyDocument5 pagesHolighaus - Thermalling EfficiencymichetraviNo ratings yet
- Aerodynamic Opitmization of A Coaxial Proprotor MTR - Ahs06Document23 pagesAerodynamic Opitmization of A Coaxial Proprotor MTR - Ahs06Renato GomesNo ratings yet
- Simple Car DynamicsDocument16 pagesSimple Car DynamicsVincentius NikimNo ratings yet
- Control Techniques of Tilt Rotor Unmanned Aerial Vehicle Systems A ReviewDocument18 pagesControl Techniques of Tilt Rotor Unmanned Aerial Vehicle Systems A Reviewchen4567No ratings yet
- Constraint DiagramsDocument18 pagesConstraint Diagramsomga747No ratings yet
- Design Skysailor PDFDocument18 pagesDesign Skysailor PDFAbubakar Al-GhwellNo ratings yet
- Design of High Lift Low Reynolds Number Airfoil For Micro Aerial VehicleDocument7 pagesDesign of High Lift Low Reynolds Number Airfoil For Micro Aerial VehicleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Pitch StabilityDocument6 pagesPitch StabilityAirPlaneTrainMobileNo ratings yet
- Reducing Wave DragDocument43 pagesReducing Wave DragJaredSagagaNo ratings yet
- Aircraft Design Project 2Document120 pagesAircraft Design Project 2Sandeep NrynNo ratings yet
- Schrenk Dan Gaya DalamDocument7 pagesSchrenk Dan Gaya DalamandriaerospaceNo ratings yet
- A2100 SatelliteDocument2 pagesA2100 Satellitediscovery159753No ratings yet
- Design ND Optimization Using CFDDocument29 pagesDesign ND Optimization Using CFDKrishna TejaNo ratings yet
- Estimation of Wing Loading and Thrust LoadingDocument23 pagesEstimation of Wing Loading and Thrust LoadingAnonymous OFTUeE6No ratings yet
- MAE 3241 Aerodynamics Homework on Aircraft TestingDocument2 pagesMAE 3241 Aerodynamics Homework on Aircraft TestingLeandre GoddardNo ratings yet
- Nixus TehachapiDocument52 pagesNixus TehachapiPauloIscoldNo ratings yet
- Aircraft DesignDocument25 pagesAircraft DesignVamsi ChowdaryNo ratings yet
- Aerodynamic Performance Analysis of A Non Planar C-Wing Using Experimental and Numerical ToolsDocument28 pagesAerodynamic Performance Analysis of A Non Planar C-Wing Using Experimental and Numerical ToolsGiang Nguyễn TrườngNo ratings yet
- Design and Performance of A Light Sport Glider: Standard Specification ForDocument18 pagesDesign and Performance of A Light Sport Glider: Standard Specification ForAhmad Zubair RasulyNo ratings yet
- Advanced Aircraft Engines - Open Rotor EnginesDocument6 pagesAdvanced Aircraft Engines - Open Rotor Enginesvishnu cNo ratings yet
- Report GliderDocument29 pagesReport GliderAmirul Haqim Mohd JoraNo ratings yet
- CH 2 Problems SheetDocument3 pagesCH 2 Problems SheetqzakryaNo ratings yet
- Conception Aero FighterDocument34 pagesConception Aero Fighterdhruv pramanik100% (1)
- Static StabilityDocument48 pagesStatic StabilityAshok RadhakrishnanNo ratings yet
- AE4011 Final Report (LHT-4)Document127 pagesAE4011 Final Report (LHT-4)Tan ZhenyangNo ratings yet
- Aerodynamic Forces and Lift Coefficients ExplainedDocument54 pagesAerodynamic Forces and Lift Coefficients Explainedrajisunilnair2438No ratings yet
- $MP 015 25Document12 pages$MP 015 25Mohammad Sli100% (1)
- Reciprocating Engines Section ADocument72 pagesReciprocating Engines Section ADhenil MangubatNo ratings yet
- AIAA 59830 918 AMOSmith High Lift AerodynamicsDocument30 pagesAIAA 59830 918 AMOSmith High Lift Aerodynamicsteflon_mac100% (1)
- Conceptual Design of A Business Jet Airc PDFDocument6 pagesConceptual Design of A Business Jet Airc PDFHamza TurhanNo ratings yet
- CFD Potential Flow and System-Based SimuDocument54 pagesCFD Potential Flow and System-Based SimuSarath Babu SNo ratings yet
- Design and Fabrication of Reactive MufflerDocument8 pagesDesign and Fabrication of Reactive MufflermacsacNo ratings yet
- MA 4701 AY 15 S1 Aircraft Design - Course Activities and PlanningDocument26 pagesMA 4701 AY 15 S1 Aircraft Design - Course Activities and PlanningKhim YangNo ratings yet
- Propeller TheoryDocument15 pagesPropeller TheoryDexterydNo ratings yet
- Low-Reynolds-Number Airfoil DesignDocument9 pagesLow-Reynolds-Number Airfoil Designamir_karimiNo ratings yet
- Aerodynamic stability derivatives for aircraft roll and yawDocument3 pagesAerodynamic stability derivatives for aircraft roll and yawGurunath AeroNo ratings yet
- Uav CFD AnalysisDocument15 pagesUav CFD AnalysisRanjeet SinghNo ratings yet
- NACA 4 Digit Airfoil Generator (NACA 5412 AIRFOIL)Document2 pagesNACA 4 Digit Airfoil Generator (NACA 5412 AIRFOIL)eng1n1nj4No ratings yet
- The Role of Drag Prediction in Combat Aircraft Design and DevelopmentDocument6 pagesThe Role of Drag Prediction in Combat Aircraft Design and DevelopmentLeiser HartbeckNo ratings yet
- Model Cessna 182Document472 pagesModel Cessna 182hr290952No ratings yet
- ADP 1 LAB ManualDocument54 pagesADP 1 LAB ManualdhanajayanNo ratings yet
- Scramjet: From Wikipedia, The Free EncyclopediaDocument39 pagesScramjet: From Wikipedia, The Free Encyclopediaaeropraveen22No ratings yet
- CFD of Drone PropellerDocument36 pagesCFD of Drone Propellerapi-451702331No ratings yet
- NACA 0012 Airfoil Analysis PDFDocument11 pagesNACA 0012 Airfoil Analysis PDFMiliani AhmedNo ratings yet
- External Loads Chapter 3 - Airframe Stress Analysis and Sizing (Niu) & Chapter 3 - Airframe Structural Design (Niu)Document19 pagesExternal Loads Chapter 3 - Airframe Stress Analysis and Sizing (Niu) & Chapter 3 - Airframe Structural Design (Niu)sqaiba_gNo ratings yet
- Design of An AutogyroDocument2 pagesDesign of An AutogyroAlexandre Pereira100% (1)
- Fillet White PaperDocument10 pagesFillet White PaperRod ManserNo ratings yet
- Winglet Airfoil Maughmer Et AlDocument8 pagesWinglet Airfoil Maughmer Et Alzaid100% (1)
- How To Be a Rocket Scientist: 10 Powerful Tips to Enter the Aerospace Field and Launch the Career of Your DreamsFrom EverandHow To Be a Rocket Scientist: 10 Powerful Tips to Enter the Aerospace Field and Launch the Career of Your DreamsRating: 5 out of 5 stars5/5 (1)
- Unmanned Aircraft SystemsFrom EverandUnmanned Aircraft SystemsElla AtkinsNo ratings yet
- Aerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsFrom EverandAerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsNo ratings yet
- Fluidic Flight Controls: Future Aviation Where Rolling and Pitching without Any Control SurfacesFrom EverandFluidic Flight Controls: Future Aviation Where Rolling and Pitching without Any Control SurfacesNo ratings yet
- Adaptive Compliant Wing: No More Flaps, the Aircraft Wing Shape Is Now MorphingFrom EverandAdaptive Compliant Wing: No More Flaps, the Aircraft Wing Shape Is Now MorphingNo ratings yet
- Narrative Report - Food Safety and SanitationDocument4 pagesNarrative Report - Food Safety and SanitationMarjorie Dela CruzNo ratings yet
- Work Based Career Episodes 3Document3 pagesWork Based Career Episodes 3Ajith JohnsonNo ratings yet
- Business Strategy and CSR 1Document19 pagesBusiness Strategy and CSR 1Vania WimayoNo ratings yet
- ATA55 CatalogueDocument5 pagesATA55 CatalogueHikmat KtkNo ratings yet
- Behringer Europower-P0569 Hca2400 Sps1000 DPX Pmp-1280s 5000 SCHDocument15 pagesBehringer Europower-P0569 Hca2400 Sps1000 DPX Pmp-1280s 5000 SCHNorel Andrei100% (2)
- Cummins 6cta8.3 Engine Spare Parts CatalogDocument11 pagesCummins 6cta8.3 Engine Spare Parts CatalogChen CarolineNo ratings yet
- 2018 Bar Examinations Practical Exercises: Legal and Judicial Ethics andDocument9 pages2018 Bar Examinations Practical Exercises: Legal and Judicial Ethics andrfylananNo ratings yet
- TECHNOLOGICAL INSTITUTE OF THE PHILIPPINES PRE BOARD EXAM DAY 3Document12 pagesTECHNOLOGICAL INSTITUTE OF THE PHILIPPINES PRE BOARD EXAM DAY 3ZZROTNo ratings yet
- How to Clear a TableDocument20 pagesHow to Clear a TableRochell CapellanNo ratings yet
- Assessing The Effectiveness of South Korea's Development Assistance in VietnamDocument16 pagesAssessing The Effectiveness of South Korea's Development Assistance in VietnamPhạm Phương AnhNo ratings yet
- JHA ConcretingDocument3 pagesJHA Concretingfatimah beluhi75% (4)
- How To Use Automotive Diagnostic Scanners (2015) PDFDocument203 pagesHow To Use Automotive Diagnostic Scanners (2015) PDFAntonio M Palma89% (9)
- Five Core Competencies of The Lean EnterpriseDocument3 pagesFive Core Competencies of The Lean EnterpriseSai Sunil ChandraaNo ratings yet
- Buddha LeaderDocument1 pageBuddha LeadersandeepbelovedNo ratings yet
- Definition of Terms (Fire Code of The Philippines)Document9 pagesDefinition of Terms (Fire Code of The Philippines)broomer27No ratings yet
- Uniform Statutory Rule Against Perpetuities (1986)Document79 pagesUniform Statutory Rule Against Perpetuities (1986)Brandon MarkNo ratings yet
- HG50 MCCB EngDocument1 pageHG50 MCCB EngMiroslaw LabudaNo ratings yet
- Schema Instrument Air-01Document1 pageSchema Instrument Air-01OudadLeO-marNo ratings yet
- Module 1 in ACC 80Document12 pagesModule 1 in ACC 80debate ddNo ratings yet
- Class Notes LUCT-updatedDocument56 pagesClass Notes LUCT-updatedYousef AzhariNo ratings yet
- Edu Uc Ddo 05 06 Onwards 7-21Document20 pagesEdu Uc Ddo 05 06 Onwards 7-21biplabsahoo10No ratings yet
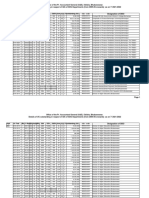
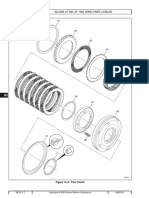
- Allison at 500, at 1500 Series Parts CatalogDocument3 pagesAllison at 500, at 1500 Series Parts Catalogamin chaabenNo ratings yet
- The Main Factors Which Influence Marketing Research in Different Countries AreDocument42 pagesThe Main Factors Which Influence Marketing Research in Different Countries AreHarsh RajNo ratings yet
- ISO 26262 for Functional Safety Critical ProjectsDocument24 pagesISO 26262 for Functional Safety Critical ProjectsZidane Benmansour100% (1)
- Citizen PTR Receipt (2023-2024)Document1 pageCitizen PTR Receipt (2023-2024)AnmolBansalNo ratings yet
- Question and Answer - 50Document31 pagesQuestion and Answer - 50acc-expertNo ratings yet
- C2022 04Document72 pagesC2022 04Leo2pbNo ratings yet
- Tumkur University Pre PHD Course Work Syllabus ManagementDocument6 pagesTumkur University Pre PHD Course Work Syllabus Managementafjwftijfbwmen100% (1)
- CMBS World - Reremic PhenomenonDocument14 pagesCMBS World - Reremic PhenomenonykkwonNo ratings yet