You might also like
- Advanced Engine Performance Specialist: Basic Powertrain DiagnosisDocument50 pagesAdvanced Engine Performance Specialist: Basic Powertrain DiagnosisOctavio Maciel100% (5)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Chapter 2 DC Circuit TheoryDocument37 pagesChapter 2 DC Circuit TheoryTynoh MusukuNo ratings yet
- 6-Electrical System 710655Document104 pages6-Electrical System 710655Edwin Ruiz Vargas83% (36)
- Lecture6 Transformer PDFDocument50 pagesLecture6 Transformer PDFAhmad Akram100% (1)
- Multimeter VIMPDocument61 pagesMultimeter VIMPSysu KumarNo ratings yet
- 2 Wattmeter MethodDocument8 pages2 Wattmeter Methodahg#0% (1)
- Electrical Machines Lab-II ManualDocument41 pagesElectrical Machines Lab-II Manualsuresh270No ratings yet
- Laboratory Manual: Hirasugar Institute of Technology, NidasoshiDocument67 pagesLaboratory Manual: Hirasugar Institute of Technology, NidasoshipriyaNo ratings yet
- Electrical Machines-II Lab ManualDocument52 pagesElectrical Machines-II Lab Manualsai100% (1)
- Determination of Transformer Parameters from Open Circuit TestDocument7 pagesDetermination of Transformer Parameters from Open Circuit TestSur ShriNo ratings yet
- Understanding Basic Electronics and Resistor FundamentalsDocument76 pagesUnderstanding Basic Electronics and Resistor FundamentalsRaine LopezNo ratings yet
- 1.O.C. & S.C. Tests On Single Phase TransformerDocument6 pages1.O.C. & S.C. Tests On Single Phase Transformerchandrakanth100% (3)
- Variation of Current Through An LDRDocument16 pagesVariation of Current Through An LDRSubiksha Ravi100% (4)
- Studying No-Load Operation of Transmission LineDocument44 pagesStudying No-Load Operation of Transmission Lineeaf1No ratings yet
- Physics Project On Convertion of Gslvanometer To AmmeterDocument19 pagesPhysics Project On Convertion of Gslvanometer To AmmeterSHIWANI MOHAN88% (8)
- Swinburne'S Test ON D.C. Shunt Machine. (Predetermination of Efficiency of Given D.C.Shunt Machine Working As Motor and Generator)Document24 pagesSwinburne'S Test ON D.C. Shunt Machine. (Predetermination of Efficiency of Given D.C.Shunt Machine Working As Motor and Generator)pragatinareshNo ratings yet
- Basic Electrical Laboratory Manual: Department of Electrical EngineeringDocument42 pagesBasic Electrical Laboratory Manual: Department of Electrical EngineeringSourav SahooNo ratings yet
- O.C & S.C Test On Single Phase Transformer.: Siddhartha Institute of Engineering & TechnologyDocument6 pagesO.C & S.C Test On Single Phase Transformer.: Siddhartha Institute of Engineering & Technologyal imranNo ratings yet
- 2.back To Back Test On Two Similar TransformersDocument5 pages2.back To Back Test On Two Similar Transformersmandadi_sailesh50% (2)
- Beee Lab ManualDocument36 pagesBeee Lab ManualChanduVarmaKalidindiNo ratings yet
- Electrical Machine-1 Manual PDFDocument40 pagesElectrical Machine-1 Manual PDFsoumencha80% (5)
- Power System Analysis Lab ManualDocument44 pagesPower System Analysis Lab ManualAlluri Appa RaoNo ratings yet
- Electric Machines LaboratoryDocument44 pagesElectric Machines Laboratory11mustafa.mNo ratings yet
- Exp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.Document7 pagesExp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.AbhishEk SinghNo ratings yet
- AC Machines Lab Manual PDFDocument91 pagesAC Machines Lab Manual PDFറിജിൽ വി ആർ100% (2)
- DEEE Parallel OperationDocument31 pagesDEEE Parallel OperationBhanoth MohanNo ratings yet
- Determine regulation and efficiency of transformer using OC and SC testsDocument45 pagesDetermine regulation and efficiency of transformer using OC and SC testsrkadiraj701150% (4)
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Advance Electrical Machine Manual 1-12Document48 pagesAdvance Electrical Machine Manual 1-12saqlainNo ratings yet
- Parallel Operation of Two Single Phase Transformers: Experiment No: 05Document18 pagesParallel Operation of Two Single Phase Transformers: Experiment No: 05Bhanoth MohanNo ratings yet
- Machine Lab Non ElectricalDocument16 pagesMachine Lab Non ElectricalAbhishek MishraNo ratings yet
- VOLTAGE TRANSFORMERS LAB EXPERIMENTDocument10 pagesVOLTAGE TRANSFORMERS LAB EXPERIMENTMohammed Abu Al HaijaNo ratings yet
- Experiment-4: V S Akshit 19BEE0435 L39+L40 1 September 2020Document10 pagesExperiment-4: V S Akshit 19BEE0435 L39+L40 1 September 2020Akshit VSNo ratings yet
- Lab 1Document32 pagesLab 1Adhithyan KzhlmNo ratings yet
- Machine LabDocument7 pagesMachine LabNurjahan-Ara StudentNo ratings yet
- EE536 ManualDocument67 pagesEE536 Manualciraj123456No ratings yet
- Yog Patil - Expt. No. 3Document8 pagesYog Patil - Expt. No. 3Yog PatilNo ratings yet
- BEE LAB MANUALDocument10 pagesBEE LAB MANUALMothxNinjaNo ratings yet
- Sumpner's TestDocument5 pagesSumpner's TestDina GaranNo ratings yet
- EET1016 Lab SheetDocument14 pagesEET1016 Lab SheetNatasha92No ratings yet
- 10eel58 Transformers and Induction Machines LaboratoryDocument32 pages10eel58 Transformers and Induction Machines Laboratorysvinod s100% (2)
- Electrical Machines Lab ManualDocument82 pagesElectrical Machines Lab Manualshehryar khanNo ratings yet
- EML Manual (2019 2023)Document43 pagesEML Manual (2019 2023)Areeba NasirNo ratings yet
- Sr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorDocument40 pagesSr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorSagar G ReddyNo ratings yet
- Electrical Machines Lab Manual (DC Machines and Transformer)Document34 pagesElectrical Machines Lab Manual (DC Machines and Transformer)AmulyaNo ratings yet
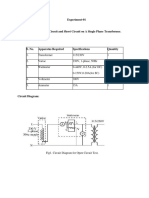
- Aim of The Experiment:: Sl. No. Name of Apparatus Specification QuantityDocument4 pagesAim of The Experiment:: Sl. No. Name of Apparatus Specification QuantityDevansh MankarNo ratings yet
- ENGR2200 Lab Manual Lab2Document12 pagesENGR2200 Lab Manual Lab2Sure TipsNo ratings yet
- Open Circuit and Short Circuit Test On Single Phase TransformerDocument5 pagesOpen Circuit and Short Circuit Test On Single Phase TransformerPratap SinghNo ratings yet
- Expt 6 EeeDocument9 pagesExpt 6 Eeezohair ahmedNo ratings yet
- Engineering Practice Lab ElectricalDocument23 pagesEngineering Practice Lab ElectricalKrishna Moorthy50% (2)
- 17eel37 Eml Lab ManualDocument64 pages17eel37 Eml Lab ManualpriyaNo ratings yet
- Analog Electronic WattmetrDocument2 pagesAnalog Electronic WattmetrKaran AnejaNo ratings yet
- Experiments in CircuitsDocument34 pagesExperiments in CircuitsAmulyaNo ratings yet
- EE Lab ManualDocument23 pagesEE Lab ManualMoordhan SongadeNo ratings yet
- Exp 1: OC and SC Test Along With Direct Load Test On A Single Phase TransformerDocument7 pagesExp 1: OC and SC Test Along With Direct Load Test On A Single Phase TransformerSumit KatreNo ratings yet
- O.C & S.C of Single Phase TransformerDocument8 pagesO.C & S.C of Single Phase Transformerkudupudinagesh50% (2)
- Electrial Machines Third ReportDocument8 pagesElectrial Machines Third ReportMohamed YahiaNo ratings yet
- ETlab Manual 2Document16 pagesETlab Manual 2jyoti maheshNo ratings yet
- BeeeDocument66 pagesBeeejaydeep gudetiNo ratings yet
- Electroagnetics 2 Lab ReportDocument8 pagesElectroagnetics 2 Lab ReportJoshuaNo ratings yet
- NAAC Presentation SummaryDocument75 pagesNAAC Presentation SummarypragatinareshNo ratings yet
- Internal Quality Assurance Cell: Welcomes NAAC Peer TeamDocument29 pagesInternal Quality Assurance Cell: Welcomes NAAC Peer TeampragatinareshNo ratings yet
- Pragati Engineering College: 1-378, Adb Road, Surampalem, Near Peddapuram, E.G.Dt, A.PDocument2 pagesPragati Engineering College: 1-378, Adb Road, Surampalem, Near Peddapuram, E.G.Dt, A.PpragatinareshNo ratings yet
- Understanding insulation and conductor properties from transmission line questionsDocument3 pagesUnderstanding insulation and conductor properties from transmission line questionspragatinareshNo ratings yet
- 01-Architecture & PlanningDocument29 pages01-Architecture & PlanningpragatinareshNo ratings yet
- Ps 4Document1 pagePs 4pragatinareshNo ratings yet
- 22 Pharmaceutical SciencesDocument12 pages22 Pharmaceutical SciencespragatinareshNo ratings yet
- 2-11 Course FileDocument74 pages2-11 Course FilepragatinareshNo ratings yet
- The Switched Reluctance MotorDocument9 pagesThe Switched Reluctance MotorVamsi KattamuriNo ratings yet
- UK-India Education & Research InitiativeDocument3 pagesUK-India Education & Research InitiativepragatinareshNo ratings yet
- SOUL Installation: Universities/Institutions and Colleges - State-Wise Sr. NoDocument2 pagesSOUL Installation: Universities/Institutions and Colleges - State-Wise Sr. NopragatinareshNo ratings yet
- New Age International (P) LTD., Publishers: Subject and Semester Book Required EnrolmentDocument1 pageNew Age International (P) LTD., Publishers: Subject and Semester Book Required EnrolmentpragatinareshNo ratings yet
- Ps 1Document2 pagesPs 1pragatinareshNo ratings yet
- Electrical Engineering MCQ QuestionsDocument3 pagesElectrical Engineering MCQ QuestionspragatinareshNo ratings yet
- Mid-I BitsDocument12 pagesMid-I BitspragatinareshNo ratings yet
- Ps 10Document5 pagesPs 10pragatinareshNo ratings yet
- Jntu Online Examinations (Mid 2 - Em3)Document19 pagesJntu Online Examinations (Mid 2 - Em3)pragatinareshNo ratings yet
- Insulation and Transmission Line QuestionsDocument3 pagesInsulation and Transmission Line QuestionspragatinareshNo ratings yet
- IETE ChapterDocument1 pageIETE ChapterpragatinareshNo ratings yet
- NEws LetterDocument9 pagesNEws LetterpragatinareshNo ratings yet
- Paper4 PDFDocument19 pagesPaper4 PDFpragatinareshNo ratings yet
- InterfaceDocument10 pagesInterfacepragatinareshNo ratings yet
- OPTIMAL PLACEMENT OF TCSC-2-libre PDFDocument16 pagesOPTIMAL PLACEMENT OF TCSC-2-libre PDFpragatinareshNo ratings yet
- Application - Report - Part - 1 - 2013-2014 (24-01-2012) PDFDocument46 pagesApplication - Report - Part - 1 - 2013-2014 (24-01-2012) PDFpragatinareshNo ratings yet
- Paper5 PDFDocument40 pagesPaper5 PDFpragatinareshNo ratings yet
- Final Ece-Sar (30.05.2013)Document200 pagesFinal Ece-Sar (30.05.2013)pragatinareshNo ratings yet
- 9th PRC Commission - Go - Ms.no52 Dt.25!02!2010Document1,012 pages9th PRC Commission - Go - Ms.no52 Dt.25!02!2010emmreddyNo ratings yet
- Understanding synchronous machine modelsDocument34 pagesUnderstanding synchronous machine modelspragatinareshNo ratings yet
- TCSC For Protection PDFDocument9 pagesTCSC For Protection PDFpragatinareshNo ratings yet
- Fuzzy ControlDocument97 pagesFuzzy ControlpragatinareshNo ratings yet
- EEE 104 LS 01 MDS March2020Document50 pagesEEE 104 LS 01 MDS March2020Sharmin Rini100% (1)
- The Negative Temperature Coefficient (NTC) Thermistor and Light-Dependent Resistor GuideDocument3 pagesThe Negative Temperature Coefficient (NTC) Thermistor and Light-Dependent Resistor GuideAyman Mohamed Hashim100% (1)
- HALO Ammeters LiteratureDocument4 pagesHALO Ammeters LiteratureYohan Anthony SudarsoNo ratings yet
- Experiment of ElectricityDocument9 pagesExperiment of ElectricityAzie HarunNo ratings yet
- Physics Kcet 2023Document12 pagesPhysics Kcet 2023Prajwal MNo ratings yet
- JNTU Hyderabad EC743PE I Mid Exam Questions and AnswersDocument3 pagesJNTU Hyderabad EC743PE I Mid Exam Questions and Answersvenkiscribd444No ratings yet
- Test System Combitest: FeaturesDocument12 pagesTest System Combitest: FeaturesleonardoNo ratings yet
- Form 3: 232/3 Physics Paper 3 (Practical) Time: 2 HoursDocument6 pagesForm 3: 232/3 Physics Paper 3 (Practical) Time: 2 HoursBenjamin mwanikiNo ratings yet
- Lab Manual: Electric Circuit Analysis I EEE-121Document9 pagesLab Manual: Electric Circuit Analysis I EEE-121earn moneyNo ratings yet
- Lca Lab 7Document4 pagesLca Lab 7Usama MughalNo ratings yet
- WPC 22005 CM IF Manual 101020 2Document127 pagesWPC 22005 CM IF Manual 101020 2Kauntey PatilNo ratings yet
- Optimize Charging System Guide for Nissan AltimaDocument21 pagesOptimize Charging System Guide for Nissan AltimaNuwan NishanthaNo ratings yet
- 2015 InstrmentationDocument16 pages2015 InstrmentationpavaniNo ratings yet
- Measuring Current Underground CADocument3 pagesMeasuring Current Underground CAVenkat DegaNo ratings yet
- MODULE FOR MEASURING - 10065 ING - Vers 2012Document8 pagesMODULE FOR MEASURING - 10065 ING - Vers 2012pezhman bayatNo ratings yet
- Trouble Shooting of PumpsDocument14 pagesTrouble Shooting of PumpsHukam ChandNo ratings yet
- Sverker 750: Relay Testing UnitDocument74 pagesSverker 750: Relay Testing UnitpiticelNo ratings yet
- University of Science & Technology, Bannu: Department of Electrical EngineeringDocument4 pagesUniversity of Science & Technology, Bannu: Department of Electrical Engineeringwahab487No ratings yet
- Measuring Capacitance Using Schering BridgeDocument10 pagesMeasuring Capacitance Using Schering Bridgeమారుతీ రామ్. ధరణీప్రగడ.వెం.సుNo ratings yet
- Naspo Valuepoint Contract 06913 (Phase One) Daniels Electronics Products/PricelistDocument39 pagesNaspo Valuepoint Contract 06913 (Phase One) Daniels Electronics Products/PricelistEka Budi HendrawanNo ratings yet
- MetriksalesenDocument28 pagesMetriksalesencosmin2581100% (1)
- Class 12 Physics Revision Notes Moving Charges and Magnetism (1) LEARN WITH GIGACHADSDocument13 pagesClass 12 Physics Revision Notes Moving Charges and Magnetism (1) LEARN WITH GIGACHADSShwetabh Aman SinhaNo ratings yet
- Catalogo ProgrammaDocument132 pagesCatalogo Programmakammun007100% (1)