You might also like
- Flight Dynamics (Fixed Wing Aircraft)Document17 pagesFlight Dynamics (Fixed Wing Aircraft)MOFEEZALAM100% (1)
- ECL Words ImprtantDocument8 pagesECL Words ImprtantОдей СаккальNo ratings yet
- ALC Vocabulary Review Unit 5 Teacher'S Copy: Transcript Answer Key Alcvr Practice TestDocument10 pagesALC Vocabulary Review Unit 5 Teacher'S Copy: Transcript Answer Key Alcvr Practice TestKRATOS JEDDAH100% (1)
- A. A Major B. A Colonel C. A Captain D. A LieutenantDocument52 pagesA. A Major B. A Colonel C. A Captain D. A LieutenantFurkan PolatNo ratings yet
- Ecl Grammar BookDocument74 pagesEcl Grammar Bookburhan CeNo ratings yet
- Literature ReviewDocument5 pagesLiterature ReviewKaptan SinghNo ratings yet
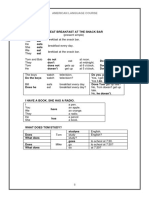
- Eat breakfast at the snack barDocument2 pagesEat breakfast at the snack barAsamir AlHaidarNo ratings yet
- Captain Miller's Car Stalled on a Hill - Grammar Quiz AnswersDocument4 pagesCaptain Miller's Car Stalled on a Hill - Grammar Quiz Answershayama suchalNo ratings yet
- Alcpt 34R (Script)Document18 pagesAlcpt 34R (Script)Matt Dahiam RinconNo ratings yet
- American Language Course Placement Test ReviewDocument18 pagesAmerican Language Course Placement Test ReviewMatt Dahiam RinconNo ratings yet
- AMERICAN LANGUAGE PLACEMENT TESTDocument9 pagesAMERICAN LANGUAGE PLACEMENT TESTMatt Dahiam RinconNo ratings yet
- Power Semi Conductor Drives Single Phase Half Controlled Bridge ConverterDocument24 pagesPower Semi Conductor Drives Single Phase Half Controlled Bridge Convertermanideep0% (1)
- Questões e GabaritoDocument11 pagesQuestões e GabaritoMuhammed OğuzhanNo ratings yet
- Ecl Test Version 1Document5 pagesEcl Test Version 1mayankNo ratings yet
- GRAMMAR/Advance/04Document8 pagesGRAMMAR/Advance/04Alexis ZelayaNo ratings yet
- Power Point ECL 59Document89 pagesPower Point ECL 59Ann CZNo ratings yet
- Vocab WilliamDocument5 pagesVocab WilliamMohamedSaidNo ratings yet
- ALCPT Practice Test QuestionsDocument5 pagesALCPT Practice Test QuestionsAbo TalebNo ratings yet
- At Once: Right AwayDocument4 pagesAt Once: Right Awayburak erdemirNo ratings yet
- Alcpt 66 Keli̇melerDocument1 pageAlcpt 66 Keli̇melerUmmet0% (1)
- American Language Course Placement Test Form 6r BDocument23 pagesAmerican Language Course Placement Test Form 6r BClaudio Maldonado100% (1)
- ALCPT Form 81Document8 pagesALCPT Form 81Tr IgarkaulNo ratings yet
- Alcpt 60 RDocument3 pagesAlcpt 60 RJorgeBlanco100% (1)
- ALCPT document analysisDocument3 pagesALCPT document analysisaasem alkhaldiNo ratings yet
- TCO Tutorial - PPSXDocument113 pagesTCO Tutorial - PPSXahmedharfoushNo ratings yet
- ALCPT DAYAN Ene22 PDFDocument12 pagesALCPT DAYAN Ene22 PDFrosalinda vazquez garciaNo ratings yet
- Alcpt 1Document17 pagesAlcpt 1Furkan PolatNo ratings yet
- Yesterday Past Tense Yesterday I WASDocument27 pagesYesterday Past Tense Yesterday I WASNirvQxNo ratings yet
- American Language Course Placement Test.Document11 pagesAmerican Language Course Placement Test.Florin RuţăNo ratings yet
- Alcpt 50 RDocument4 pagesAlcpt 50 RJorgeBlancoNo ratings yet
- Alcpt 27R (Script)Document21 pagesAlcpt 27R (Script)Matt Dahiam RinconNo ratings yet
- ALC No.01Document12 pagesALC No.01พีรภพ สุขจิตรNo ratings yet
- Alcpt 56Document16 pagesAlcpt 56Avramescu CatalinNo ratings yet
- C1, C2 Word ListDocument3 pagesC1, C2 Word ListvilteNo ratings yet
- Institute English: Defense CenterDocument12 pagesInstitute English: Defense CenterJuan C. Yujra LopezNo ratings yet
- Ecl Grammar BookDocument82 pagesEcl Grammar BookMESSITONo ratings yet
- Alcpt 42 RDocument4 pagesAlcpt 42 RmariaNo ratings yet
- Alcpt 31R (Script)Document18 pagesAlcpt 31R (Script)Matt Dahiam RinconNo ratings yet
- Form 74 Reading Comprehension Test Questions Answers KeyDocument17 pagesForm 74 Reading Comprehension Test Questions Answers Keyชัยณรงค์ เทียนบุตรNo ratings yet
- Book 5 Quiz CDocument1 pageBook 5 Quiz CJesus LeguizamonNo ratings yet
- Alcpt 32R (Script)Document18 pagesAlcpt 32R (Script)Matt Dahiam RinconNo ratings yet
- Defense Language Instiiule English Language Center: Lackland Air Force Base, TexasDocument37 pagesDefense Language Instiiule English Language Center: Lackland Air Force Base, TexasAngel WingsNo ratings yet
- 60R - Tapescripty PDFDocument2 pages60R - Tapescripty PDFrjmartins1982100% (1)
- American Language Course Placement Test Form 37 ReviewDocument10 pagesAmerican Language Course Placement Test Form 37 Reviewzeina talahNo ratings yet
- Test Sample For Alpt TestDocument25 pagesTest Sample For Alpt TestFernando Rodrigo Muñoz67% (3)
- Alc Form 67Document6 pagesAlc Form 67charles hutapeaNo ratings yet
- 2RDocument10 pages2RPokli PuskersinNo ratings yet
- Alcpt Form 138Document14 pagesAlcpt Form 138Mo'men Mohamad100% (2)
- DLI Dictionary With ArabicDocument290 pagesDLI Dictionary With ArabicKRATOS JEDDAHNo ratings yet
- Nouns: Alcpt - Book 14 VerbsDocument2 pagesNouns: Alcpt - Book 14 Verbsishawki201350% (2)
- 33RDocument9 pages33RFirson DanendraNo ratings yet
- ALC No.02Document12 pagesALC No.02พีรภพ สุขจิตรNo ratings yet
- Ohne Lösung & Fragen+ - ALCPT-70Document12 pagesOhne Lösung & Fragen+ - ALCPT-70Roland Hutterer100% (1)
- ECL VOCAB Book1 30 1Document230 pagesECL VOCAB Book1 30 1rached saidiNo ratings yet
- Telephone, letters, money - common secretarial tasksDocument7 pagesTelephone, letters, money - common secretarial tasksALCPT ArabicNo ratings yet
- SkyWay Otvety Na VoprosiDocument14 pagesSkyWay Otvety Na VoprosiVladNo ratings yet
- LecturenoteF14 PDFDocument159 pagesLecturenoteF14 PDFAnh NguyenNo ratings yet
- Aerodynamics Flight Vehicle TerminologyDocument16 pagesAerodynamics Flight Vehicle TerminologyJohn KevinNo ratings yet
- ATPL Inst 3.3 PDFDocument10 pagesATPL Inst 3.3 PDFKoustubh VadalkarNo ratings yet
- EmmpennageDocument14 pagesEmmpennageHarshita SobhaniNo ratings yet
- Thessaloniki EstablishmentDocument220 pagesThessaloniki Establishmentzedbolete6704No ratings yet
- How electricity is generated and transmittedDocument4 pagesHow electricity is generated and transmittedMark WoodNo ratings yet
- M-Series Electromagnetic Flow Meter Converter: Installation, Operation and Maintenance ManualDocument45 pagesM-Series Electromagnetic Flow Meter Converter: Installation, Operation and Maintenance ManualRodrigo CiezaNo ratings yet
- GarageBand For Mac: Add and Edit Effect Plug-InsDocument3 pagesGarageBand For Mac: Add and Edit Effect Plug-InsKanan TiwariNo ratings yet
- Pak Elektron Limited Technical Data Sheet of Transformer: SpecificationDocument1 pagePak Elektron Limited Technical Data Sheet of Transformer: SpecificationbilalNo ratings yet
- Triband Eight-Port Antenna: Opa65R-Ke4D Data SheetDocument13 pagesTriband Eight-Port Antenna: Opa65R-Ke4D Data SheetGuillermoNo ratings yet
- Prodelin 1251Document2 pagesProdelin 1251Marcos Della MeaNo ratings yet
- Catalogue Cap FLSDocument53 pagesCatalogue Cap FLSTrần Văn PhúcNo ratings yet
- Planning Optical Power Budget in DWDM SystemsDocument48 pagesPlanning Optical Power Budget in DWDM Systemsrafael antonio padilla mayorgaNo ratings yet
- Advantage GCS Modbus Protocol Support 6v8Document117 pagesAdvantage GCS Modbus Protocol Support 6v8Friends foreverNo ratings yet
- Pti 25 30 T4F - OmDocument24 pagesPti 25 30 T4F - OmYacine DaliNo ratings yet
- CIGRE-115 Switchgear Condition MonitoringDocument8 pagesCIGRE-115 Switchgear Condition Monitoringkamuik100% (1)
- Air Conditioning Temp Control: Erj 145 Customer TrainingDocument17 pagesAir Conditioning Temp Control: Erj 145 Customer TrainingPablo BeltranNo ratings yet
- 9A04306 Digital Logic DesignDocument4 pages9A04306 Digital Logic DesignMahaboob SubahanNo ratings yet
- DDCArv Ch1Document96 pagesDDCArv Ch1Islamic & Science AcademyNo ratings yet
- Electrical ConduitsDocument8 pagesElectrical ConduitsFrisco Gabriel100% (1)
- Buc 6w-KuDocument5 pagesBuc 6w-KukattiaNo ratings yet
- COOLER MASTER - RS-850-AFBA-G1 - 850W - ECOS 3494 - ReportDocument1 pageCOOLER MASTER - RS-850-AFBA-G1 - 850W - ECOS 3494 - ReportSat.Narkoba Polres EndeNo ratings yet
- KP-38027 Maintenance Instructions A EnglishDocument34 pagesKP-38027 Maintenance Instructions A EnglishRonaldo GeradoresNo ratings yet
- APC Symmetra PX-2Document8 pagesAPC Symmetra PX-2drastir_777No ratings yet
- Lse9901b1260-Lishin Elec SpecDocument9 pagesLse9901b1260-Lishin Elec SpecRobertContrerasNo ratings yet
- Chapter 3 Notes NBCAS511Document18 pagesChapter 3 Notes NBCAS511Zilly cocoNo ratings yet
- Solar Grass CutterDocument75 pagesSolar Grass CutterRajreddy100% (4)
- Chapter 5 - Gas Shielded Metal Arc Welding PDFDocument16 pagesChapter 5 - Gas Shielded Metal Arc Welding PDFVasco Jardim0% (1)
- KK2.1 & KK2.1.5 Instruction Manual V1.16S1 Pro Issue 1 Settings GuideDocument28 pagesKK2.1 & KK2.1.5 Instruction Manual V1.16S1 Pro Issue 1 Settings GuidePercy Pinto CornejoNo ratings yet
- Erthing TransformerDocument8 pagesErthing Transformerbpd21No ratings yet
- Electrical Machines-I Lab ManualDocument62 pagesElectrical Machines-I Lab ManualRaviNo ratings yet
- Versamate Cleanroom Receptacle PR19Document1 pageVersamate Cleanroom Receptacle PR19Anonymous llBSa7No ratings yet
- FL5 Series PLC CatalogueDocument25 pagesFL5 Series PLC CatalogueIngenieriaNo ratings yet
- JQX 15F (T90)Document1 pageJQX 15F (T90)Amang GayamNo ratings yet