Professional Documents
Culture Documents
Ficha 3
Uploaded by
Cordova BerlynCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Ficha 3
Uploaded by
Cordova BerlynCopyright:
Available Formats
2006
FICHA 3 |
APUNTES DE ANLISIS MATRICIAL DE ESTRUCTURAS
Estabilidad de las Construcciones 2 | Facultad de Arquitectura | UdelaR
APUNTES DE ANLISIS MATRICIAL DE ESTRUCTURAS
CASES DICTADAS POR EL INGENIERO ATILIO MORQUIO
EDITADOS CON LA COLABORACIN DE LAS ARQUITECTAS MARIANA JAURI, LAURA BOZZO, CRISTINA DUFRECHOU Y MNICA UMPIERRE Y DE LA BR. CLAUDIA CHOCCA.
Estas notas de clase son una versin corregida de las clases dictadas en el primer y segundo semestre del ao 1998.
RELACION ENTRE p, V y M PARA UNA VIGA RECTA
Aplicando las ecuaciones de equilibrio, buscamos hallar una relacin diferencial entre la carga distribuida p, el cortante V y el momento flector M. Para hallar esta relacin se elige un sistema de Y ejes (X e Y) y se considera el equilibrio de un elemento infinitesimal de viga RR de longitud dx. Este elemento considerado como cuerpo libre est p sometido al cortante y momento flector que actan en las dos secciones de corte y a la carga elemental transversal p.dx . (Eventualmente se podra R R X considerar una fuerza axil N como caso ms dx x general). x+dx El elemento diferencial debe cumplir con las ecuaciones de equilibrio.
p.dx
1) Proyectando segn la direccin vertical se tiene: M(x)
V(x)
V(x+dx) M(x+dx)
V(x) + pdx - V(x +dx)=0 pdx = V(x+dx) - V(x)
P N(x) N(x+dx)
R dx x
Resultando que:
R x+dx
p( x) =
dV = V ( x) dx
(I)
2)Proyectando segn la direccin horizontal resulta: N(x+dx) - N(x) = 0 o sea:
N(x+dx) = N(x) O sea que en ausencia de fuerzas horizontales aplicadas, como en nuestro caso, deber ser la fuerza axial constante. 3) Momentos en relacin al punto P. Los momentos tomados en sentido horario nos proporcionan otra ecuacin.
M ( x) + V ( x )dx +
O sea resulta tambin:
pdx 2 M ( x + dx ) = 0 2
M ( x + dx) M ( x) pdx = V ( x) + dx 2
Cuando dx tiende a cero el trmino de la derecha se convierte en la derivada del momento y p.dx tambin tiende a cero, con lo cual es posible eliminarlo resultando
V ( x) =
dM = M ( x) dx
(II)
Finalmente combinando las relaciones (I) y (II), se concluye que
dV d 2M p( x) = = V ( x ) = = M " ( x) dx dx 2
(III)
Esta ecuacin diferencial relaciona la carga distribuida, el cortante y el momento flector para una viga recta. Observese que las tres magnitudes relacionadas son en general funciones de x, o sea de la coordenada del punto.
RELACIN ENTRE EL MOMENTO FLECTOR Y EL RADIO DE CURVATURA.
Para relacionar las solicitaciones en una viga con su deformada, se acepta (dado que normalmente el efecto producido por el cortante es muy pequeo comparado con el producido por el momento flector) que puede considerarse solamente la influencia del momento flector. O sea, dicho de otra manera, para la obtencin de la deformada (conocida tambin como elstica) de una viga, puede normalmente ser despreciado el esfuerzo cortante. Tambin normalmente se considera vlida la hiptesis de Bernoulli, o sea que las secciones planas y perpendiculares al eje, luego de deformada la viga, se mantienen planas y perpendiculares al eje.
C CD = r
A3
B3
dx 2 A2 A2 A4 A3=A3 A4 LN A1
dx 2 B2 B2 B4 B4 B3=B3
El radio de curvatura (r) de la deformada de una viga puede ser obtenido a partir del momento flector existente. Segn se indica en la figura tomaremos la coordenada x en la direccin de la viga y analizaremos el problema imaginando un trozo de la viga de longitud dx. Si consideramos que para ese valor de x existe un momento flector M (que en general ser funcin de x ), tenemos que la viga que originalmente era recta (con un radio de curvatura infinito) se va a deformar alcanzando la forma de un segmento de circunferencia de radio de curvatura r (en la medida que M sea funcin de x, el radio de curvatura tambin lo ser). Elegiremos un punto genrico A4 definido por la coordenada . Notaremos el punto antes de que la viga se deforme como A 4 y luego de deformada como A4. Para los dems puntos se emplear la misma notacin. Por tener todos los lados paralelos los tringulos A3, A4, A4 y C, D, A3 son semejantes de donde resulta que: A4 B4
A1
B1
B1
o lo que es lo mismo:
2 = A4 A4 r
dx
2 A4 A4 = r A4 B4
Pero por otro lado resulta que la deformacin de la fibra A4 B4 (definida por la coordenada ) viene dada por:
( ) =
A4 A4 + B4 B4 2 A4 A4 = A4 B4 A4 B4
Juntando las dos ltimas igualdades resulta: ( ) =
r r
y como el material es elstico, la tensin en esa fibra ser: ( ) = E
Finalmente el momento flector producido por estas tensiones en la seccin se obtendr integrando las tensiones multiplicadas por el brazo correspondiente en toda la seccin, resultando:
M = ( )dA =
Seccin
EI E E 2 dA = 2 dA = r r r
Seccin Seccin
Es claro que el mdulo de elasticidad y el radio de curvatura son constantes en toda la seccin y por eso pueden ser sacados afuera de la integral. La ltima igualdad es evidente pues la integral que queda no es otra cosa que la definicin de la inercia de la seccin. La igualdad obtenida anteriormente puede ser tambin expresada en la forma:
1 M = r EI
Esta expresin fue hallada para un determinado punto de coordenada x. Es claro que en general el momento vara con x y en consecuencia el radio de curvatura tambin variar. La inercia de la seccin puede ser constante o variable segn x. Los dos trminos de la igualdad sern entonces funciones de x, pero la igualdad deber cumplirse para todo x. ECUACION DE LA ELASTICA. La deformada de una viga puede ser expresada como una funcin y (x) segn se indica en la figura. Si se acepta (como hemos aceptado) la hiptesis de pequeos desplazamientos, con consideraciones de geometra analtica (que omitiremos) se puede establecer que:
1 d2y = r dx 2
Y Por otro lado para pequeos ngulos de giro se tiene que la tangente del ngulo puede ser asimilada con el ngulo, cuando este es medido en radianes. Resultando que:
tg
(x)
dy = tg dx
y(x) x
Juntando las anteriores conclusiones tendremos X que:
d 2 y d 1 M = = = dx r EI dx 2
En la anterior igualdad, como ya haba sido analizado, cada trmino ser funcin de la coordenada x. En general el momento flector es funcin de x, la inercia de la seccin tambin puede serlo (si la viga no tiene una seccin constante). El mdulo de elasticidad podra variar solamente si el material no fuera homogneo. En nuestro curso descartaremos esta ltima posibilidad.
ANALOGIA DE MOHR Resumiendo los resultados obtenidos anteriormente tenemos dos expresiones bsicas, una que relaciona los esfuerzos en la viga y otra que relaciona el momento con la deformada y el giro, que son:
p=
dV d 2 M = dx dx 2
M d d 2 y = = EI dx dx 2
Obsrvese que ambas ecuaciones (son llamadas ecuaciones diferenciales, pues en ellas intervienen las derivadas de distintas funciones) tienen una clara coincidencia, en cuanto a su forma. Esto llev a Mohr a imaginar una analoga entre una y otra ecuacin. Para ello pens que si sustituimos en la primera la carga distribuda p por el diagrama de M / EI el diagrama de cortante que obtendremos ser en realidad el diagrama correspondiente al angulo y el diagrama de momentos que obtenemos no ser otra cosa que la deformada de la viga. Esta afirmacin en el caso de la viga simplemente apoyada es totalmente vlida. En el caso de una viga con otros vnculos debe hacerse alguna consideracin adicional, en la cual no entraremos. En nuestro curso nos limitaremos a usar el caso de la viga simplemente apoyada. Resumiendo las conclusiones de la analoga de Mohr podemos decir que para una viga simplemente apoyada los diagramas de los ngulos y de la deformada de la viga, pueden obtenerse considerando que la viga est sometida a una carga distribuda de valor M/ EI. Con esa carga ficticia los diagramas de cortante y momento que se obtienen sern en realidad los diagramas del giro y de la elstica respectivamente. Con la carga real ser: p(x) Con la carga ficticia ser: p M = EI
V=
M=y
El cortante ficticio (giro en la realidad) en el extremo de la viga (o sea en el apoyo) ser igual a las reacciones verticales ficticias en dichos apoyos (giros en los extremos en la realidad). Podra hacerse un anlisis ms preciso teniendo en cuenta el signo de cada uno de los trminos, pero esto no parece necesario pues conocido el sentido de las cargas p es bastante evidente cual es el sentido de los giros que se producen en los apoyos.
Normalmente en las vigas las cargas p estn dirigidas hacia abajo y entonces la deformada y los ngulos de giro tendrn los signos que se indican en la figura (en A el giro se produce en sentido horario y en B en sentido antihorario). Si fuera otro el sentido de la carga distribuda p de todas maneras se obtendra fcilmente el sentido de los ngulos de giro. La analoga de Mohr ser usada a continuacin para establecer las expresiones del giro que se produce en los extremos de una viga simplemente apoyada. En particular se trabajar con tres situaciones tipo. Un estado de carga ms complejo que los tres elegidos como tipos, ser resuelto como una combinacin lineal de ellos, en virtud de la validez del principio de superposicin.
Deformada A B
GIROS EN LOS EXTREMOS DE UNA VIGA SIMPLEMENTE APOYADA. Viga con dos apoyos Ao= rea G p M = EI R VA=A VB=B Si cargamos la viga con el diagrama de momentos, y ms an, con M por la analoga establecida, las EI reacciones que se obtienen son A y B.
A = B =
R.b a+b Ra a+b
A = B =
A0 b L A0 a L
a
L
De esa manera llegamos a un procedimiento para determinar los giros en los extremos de la viga. A y B quedan expresados en radianes. Como la viga es simplemente apoyada los desplazamientos yA e yB sern cero. Para facilitar el estudio de aqu en adelante, el trmino que es usado como la carga distribuda ficticia puede ser reagrupado de la siguiente manera:
I M 1 = M min EI EI min I
Donde Imin ser el valor de la inercia mnima de la viga. La carga ficticia puede de esa manera, ser dividida en tres trminos. El primero de ellos no depende
de x (es constante para toda la viga) pues ni el mdulo de elasticidad ni la inercia mnima dependen de la coordenada x. El segundo factor es el diagrama de momentos y el tercer factor es el cociente entre la inercia mnima y la inercia en cada punto. Este tercer factor en el caso que la viga tenga inercia constante ser igual a 1 y puede ser eliminado. En el caso que la inercia de la seccin sea variable el tercer factor ser una funcin de x que solo depende de la geometra de la viga. El primer factor por su parte al ser constante puede ser usado para dividir a la carga ficticia que se coloca en la viga o ms sencillo todava, hacer esa reduccin al final luego de obtenidos los valores de las reacciones producidas por la carga ficticia. Esta ltima posibilidad ser la que emplearemos en lo sucesivo. O sea resumiendo: tomaremos como carga ficticia el producto del diagrama de momentos por el tercer factor (en el caso que la viga sea de seccin constante alcanzar con tomar solamente el diagrama de momentos). Luego de obtenidas las reacciones ficticias tendremos que multiplicarlas por el primer factor para obtener los giros de los extremos. Con estas consideraciones pasamos a definir las tres aplicaciones tipos que nos servirn en lo sucesivo: APLICACIONES a) Carga ubicada en el tramo En este caso usaremos el subndice 1 para identificar este tipo de carga. Para resolverlo colocaremos como carga distribuida ficticia el diagrama MImin , I(x) (usaremos directamente el diagrama de momentos M en el caso de inercia constante). Para este diagrama de carga distribuda las reacciones pueden ser calculadas planteando equilibrio de fuerzas. A las reacciones as obtenidas tendremos que dividirlas entre EImin (EI en el caso de inercia constante) para obtener los giros en los apoyos. En definitiva obtenemos:
A1 G
R(A1)
x1 L
x1
A1 =
Si definimos
A1 x1 EI min L
BI =
A1 x1 EI min L
EI min L
(para el mtodo de Cross
ser llamado rigidez de la viga).
A1
A x = 1 21 L A1 x1 L2
Si la inercia es constante, A 1 es el rea correspondiente al diagrama de momentos.
B1 =
b) Momento de valor unitario, ubicado en el extremo izquierdo del tramo. Para este caso usaremos el subndice 2. En este caso ser:
M2(x) A B
A2 =
A2 x2 L2 A2 x 2 L2
B2 =
M=1
A2 G
MImn I
Y si la inercia es constante:
A2 =
L 2
x2 =
2 L 3 1 3
x2 =
1 L 3 1 6
x2 L
x2
A2 =
B2 =
c) Momento de valor unitario, ubicado en el extremo derecho del tramo. Para este caso usaremos el subndice 3. En este caso ser:
M3(x) A B M=1
A3 =
A3 x3 L2
B3 = A3
G
A3 x3 L2
A3 = L 2
Y si la inercia es constante:
x3 =
x3 L x3
1 L 3 1 6
x3 =
2 L 3 1 3
A3 =
B3 =
RELACIONES FUERZAS-DESPLAZAMIENTOS EN UNA VIGA EMPOTRADA EN LOS DOS EXTREMOS. A) Caso General: Con los elementos que hemos visto hasta ahora podemos encarar este problema, que es bsico para luego ver los diferentes mtodos de resolucin de estructuras. Se trata de determinar las relaciones entre las fuerzas aplicadas en los extremos de una viga y los deplazamientos de estos puntos. Ms precisamente, (en nuestro caso, que estudiaremos mtodos de los desplazamientos ) interesar colocar las fuerzas en los extremos de la viga en funcin de los desplazamientos de esos extremos. Supondremos por ahora que no hay fuerzas aplicadas en los puntos intermedios de la viga. En funcin de lo anterior tendremos que cualquiera sean los desplazamientos y giros que se produzcan en los extremos y cualquiera sean las fuerzas y momentos que estn aplicados en los smos estos pueden resumirse en las siguientes figuras. vA uA
A B
vB uB XA
YA
YB XB
A A vA uA
B B vB uB
MA
MB
Para simplificar nuestro lenguaje, cuando digamos desplazamientos estaremos hablando indistintamente de desplazamientos o giros. De esa manera tendremos 6 desplazamientos posibles. Lo mismo haremos cuando digamos fuerzas, estaremos hablando indistintamente de fuerzas o momentos aplicados. En total tendremos 6 fuerzas aplicadas posibles. Los sentidos que estn dibujados corresponden a los signos que consideraremos positivos para cada una de las magnitudes. En lo sucesivo debemos prestar particular atencin a estos signos. Nuestro problema quedar resuelto cuando logremos colocar las 6 fuerzas en funcin de los 6 desplazamientos. Como es vlida la hiptesis de superposicin podemos estudiar cada movimiento por separado. Luego la suma de dos o ms movimientos estar producida por la suma de las fuerzas aplicadas correspondientes a cada uno de los desplazamientos. En general sabemos que para una viga simplemente apoyada, los giros en sus extremos pueden ser obtenidos superponiendo los tres estados tipos vistos anteriormente. En este estudio en la medida que no hay cargas aplicadas al interior del tramo, se puede prescindir del caso tipo 1 y alcanza con superponer los casos tipos 2 y 3. Prestando atencin a los sentidos de los giros que hemos elegido como positivos, se puede concluir que en una viga simplemente apoyada, sometida a momentos MA y MB en sus extremos, los giros A y B en sus extremos son los siguientes:
A = M A A2 M B A3 B = M A B 2 + M B B 3
10
Mientras que para que haya equilibrio esttico las reacciones verticales debern ser:
YA =
MA + MB L (M A + M B ) YB = L
B)Caso particular con giro en A solamente. Comenzaremos estudiando cuando A 0 y todo los dems desplazamientos son nulos. En este caso se debe cumplir que:
A= M A A2 M B A3 0 = B = M A B 2 + M B B 3
Debemos recordar que A2, A3, B2 y B3, son propiedades de la geometra de la viga, o sea que para una viga dada son datos conocidos. Tambin A es un dato, pues es un giro que imponemos. De lo anterior resulta que tenemos un sistema de dos ecuaciones con dos incgnitas que son MA y MB. Estas dos incgnitas pueden ser despejadas obtenindose las siguientes expresiones:
M A = 4 A A M B = AB M A
A A MA MA L MB B En las que A y AB vienen dadas por las siguientes expresiones:
A = MA+MB L
L2 x3 4 A2 x2 x 2 x 3 A2 x 2 x3 = A3 x3 x3
MA+MB L
AB =
C) Caso particular con giro en A solamente y seccin constante (I=cte.) Cuando la seccin es constante las expresiones de las constantes se simplifican y se obtienen los siguientes valores: 1
I = I min = cte.
A =1
AB =
2 4 EI A L 2 EI MB = A L 6 EI YA = 2 A L 6 EI YB = A L2 MA =
Con esos valores los momentos y fuerzas aplicadas sobre los extremos de la viga sern:
Teniendo en consideracin que no hay ningn estiramiento ni acortamiento de la viga, resulta finalmente que:
XA =0 XB =0
11
D) Caso particular con giro en B solamente. Estudiaremos ahora cuando B = 0 y todo los dems desplazamientos son nulos. Este caso es similar al anterior, reemplazando en las ecuaciones y despejando los momentos en los extremos se obtiene:
M B = 4 B B
MB A B MA L MA+MB L MA+MB L B
M A = AB M B
Donde las constantes B y BA vienen dadas por las siguientes expresiones:
B =
L2 x3 x 2 4 A3 x3 x 2 A3 x3 x = 2 A2 x2 x2
BA =
E) Caso particular con giro en B solamente y seccin constante (I=cte.) Nuevamente se cumple que:
I = I min = cte.
Y las fuerzas aplicadas en los extremos resultan:
B =1
BA =
1 2
2 EI B L 4 EI MB = B L 6 EI YA = 2 B L 6 EI YB = B L2 XA = 0 XB = 0 MA =
F) Caso particular con desplazamiento vertical en A, solamente Estudiaremos ahora cuando v A 0 y todos los dems desplazamientos son nulos. Este caso es aparentemente ms complejo pero puede ser reducido a una situacin similar a las anteriores. Para hacer esta simplificacin el movimiento de la viga puede ser descompuesto en dos movimientos. Un primer movimiento que es meramente un giro de la viga que se mantiene recta o sea sin ninguna carga aplicada. Un segundo movimiento que ser el indicado en la figura o sea que estamos en el caso de una viga simplemente apoyada con dos ngulos de giro en sus extremos que son:
A =B =
L
vA L vA L
Y con las ecuaciones que quedan:
M A A2 M B A3 =
M A B 2 + M B B 3 =
12
Resultando: vA
= A
M A = 4 A (1 + AB ) M B = 4 B (1 + BA )
vA L vA L
vA
+
vA
v A
Donde y son los mismos coeficientes ya indicados anteriormente.
G) Caso particular con desplazamiento vertical en A, solamente y con I=cte. En este caso resulta:
I = I mn = cte. MA =
= A = B = 1
= AB = BA = 1 / 2
Y en consecuencia:
6 EI vA L2 6 EI M B = 2 vA L 12 EI YA = 3 v A L 12 EI YB = 3 v A L XA = 0 XB = 0
H) Caso particular con desplazamiento vertical en B. En este caso ser B 0 y todos los dems desplazamientos = 0 Producir un cierto desplazamiento en el punto B, implica aplicar las mismas fuerzas que para producir el desplazamiento contrario en el punto A. En consecuencia el problema puede ser estudiado como si fuera el caso F pero tomando A=B.
I) Caso particular con desplazamiento vertical en B y con I = cte. De sustituir resultan y igual que en el caso G, y
6 EI vB L2 6 EI MB = vB L2 12 EI YA = 3 vB L 12 EI YB = 3 v B L XA = 0 XB = 0 MA =
13
J) uA 0 y todos los dems desplazamientos nulos. Estas def ormaciones generalmente son pequeas comparadas con las otras. El mtodo matricial las considera de todas maneras. El mtodo de Cross en cambio las desprecia. En este caso si aceptamos que el rea A de la seccin es constante, se tendr que la deformacin:
XA uA
X B = X A
uA L
, la tensin
Eu A EAu A , la fuerza axil X = L L
MA =0 MB = 0 YA = 0 YB = 0 EA XA = uA L EA XB = uA L
y en consecuencia x A = x B =
EA u A o sea: L
K) uB 0 y todos los dems desplazamientos = 0, aceptamos tambin que A = cte. Es lo mismo que hacer: Resultando que:
u A = u B MA =0 MB = 0 YA = 0 YB = 0 EA uB L EA XB = uB L XA =
14
EXPRESION GENERAL Para el caso de seccin constante si se superponen los seis estados analizados previamente se obtienen las siguientes expresiones:
XA =
YA = MA =
EA uA L 12 EI 6 EI vA + 2 A 3 L L 6 EI 4 EI vA + A 2 L L EA uA L 12 EI 6 EI vA 2 A 3 L L
EA uB L 12 EI 6 EI vB + 2 B 3 L L 6 EI 2 EI vB + B 2 L L
XB =
YB = MB =
EA uB L + 12 EI 6 EI vB 2 B 3 L L 6 EI 4 EI vB + B 2 L L
6 EI 2 EI vA + A 2 L L
Estas relaciones permiten expresar las fuerzas y momentos aplicados sobre los extremos de la viga, en funcin de los seis desplazamientos posibles de los extremos. Este haba sido nuestro objetivo inicial. Obsrvese que las lneas trazadas dividen los trminos en cuatro zonas. La primera zona corresponde a la influencia de los desplazamientos en A sobre las fuerzas en A. En general cada una de las zonas expresa la influencia de los desplazamientos de un punto sobre las fuerzas en ese mismo o en el otro punto. Si la viga no fuera de seccin constante los coeficientes seran diferentes (ms complicada la expresin, pero con el mismo andamiento). Para expresar las ecuaciones hemos colocado los desplazamientos en columnas dejando los espacios libres cuando no hay trminos. Los coeficientes que multiplican a los desplazamientos dependen exclusivamente de las caractersticas de la viga (A, E, I, L) y en el caso de seccin variable tendrn una expresin ms compleja, pero en ltima instancia dependen tambin de las propiedades geomtricas y del mdulo de elasticidad de la viga. Estos coeficientes pueden ser colocados formando una matriz (forma matemtica constituida por un conjunto de n*m nmeros colocados en filas y columnas). De la utilizacin de esta forma matemtica proviene el nombre del mtodo de anlisis estructural conocido como anlisis matricial de estructuras. La matriz (conjunto de coeficientes) es denominada matriz de rigidez de la viga. En nuestro curso no vamos a emplear esta herramienta matemtica, pues no ha sido dada en los cursos previos. Eludiremos su uso buscando dar una explicacin con un lenguaje accesible para el estudiante.
15
RELACION FUERZAS-DESPLAZAMIENTOS EN UNA PIEZA EMPOTRADA-ARTICULADA A) Caso general Complementaremos el caso de la viga empotrada en los dos extremos ya estudiada, con el caso de la viga que tiene un extremo empotrado y otro articulado. Supondremos que el extremo B est articulado, debiendo ser en consecuencia MB =0.
vA uA
vB uB
YA XA
YB XB
MA
MB = 0
En este caso se pueden despejar todas las fuerzas y momentos incgnitas que sern en este caso cinco (pues MB es nulo y en consecuencia conocido) con todos los desplazamientos menos B. O sea en definitiva se puede establecer una relacin de 5 fuerzas con 5 desplazamientos. B puede ser obtenido como consecuencia de los dems desplazamientos y ser en general diferente de cero. Solo veremos dos casos, que son los que interesan para nuestro estudio. B) Giro en A y los otros cuatro desplazamientos nulos. Como MB es nulo las ecuaciones que nos daban los ngulos de giro en A y B se simplifican y solo dependen de MA. La primera de ellas queda:
A = M A A2
A MA MA L MA L
El resultado que se obtiene, de sustituir el giro A2 ser:
M A = 4 A A
Donde
MB =0
A =
L2 4 A2 x2
C) Giro en A y los otros cuatro desplazamientos nulos, con I=cte. En este caso resulta:
A =
L2 = 0.75 L 2L 4 2 3 3EI A L
MB = 0
Y en consecuencia ser:
M A = 3 A =
16
D) Desplazamiento vertical en A y todos los otros cuatro desplazamientos cero. En este caso se puede descomponer el desplazamiento en dos como en el caso empotrada empotrada y queda equivalente a un giro de valor vA / L. Las expresiones quedan:
M A = 4 A
vA L
MB = 0
Donde A ser la expresin ya definida en el caso B. E) Desplazamiento vertical en A y todos los otros cuatro desplazamientos cero, con I=cte. En este caso resulta nuevamente:
A = 0.75
Y los momentos
M A = 3
v A 3EI = 2 vA L L
MB = 0
ALGUNAS CONSIDERACIONES SOBRE EL MTODO DE CROSS En Cross definimos rigidez como el valor:
E I m n L
El coeficiente acta corrigiendo la rigidez en base a la variacin de la seccin y tambin de los vnculos en los extremos. El valor determina el momento que se trasmite para el otro extremo. Es llamado coeficiente de transmisin. Para inercia constante, estos valores son conocidos y ya han sido vistos. Cuando la inercia es variable, hay que recurrir a tablas. Las expresiones en cada uno de los casos estn resumidas en el cuadro que est a continuacin. El mtodo de Cross ser retomado ms adelante.
18
FUERZAS Y MOMENTOS DE EMPOTRAMIENTO PERFECTO A) Barra doblemente empotrada Llamaremos fuerzas y momentos de empotramiento perfecto (tambin llamados momentos freno) a las reacciones que se producen en los apoyos de la viga cuando son aplicadas las cargas. Cuando la viga es considerada doblemente empotrada el estado de carga puede ser estudiado como la superposicin de tres estados. Estos tres estados de carga los consideraremos para una viga simplemente apoyada y sern los tres estados elementales ya estudiados, que hemos denominado con los subndices 1,2 y 3. Los momentos en los extremos son incgnitas de modo que los estados 2 y 3 que correspondan a un momento unidad debern ser multiplicados por el valor de los momentos incgnitas. Como la viga se encuentra empotrada en los dos extremos tendremos que imponer dos condiciones, pues sabemos que los ngulos sern nulos en los dos extremos.
B MB
A
A MA
Recordando que:
A1 =
A1 x1 L2 A1 x1 L2
A2 =
A2 x2 L2 A2 x 2 L2
A3 =
A3 x3 L2 A3 x3 L2
B1 =
B2 =
B3 =
Esta condicin queda establecida por las ecuaciones siguientes:
A = A1 + M A A2 + M B A3 = 0 B = B1 + M A B 2 + M B B 3 = 0
Este puede ser considerado un sistema de dos ecuaciones lineales con dos incgnitas MA y MB. Para resolver este sistema de ecuaciones, podemos multiplicar la primera ecuacin por B3 y luego restarle la de abajo multiplicada por A3. De esa manera se elimina MB y queda como nica incgnita MA. Anlogamente puede ser multiplicada la segunda ecuacin por A2 y restarle la primera multiplicada por B2. De esa manera se elimina MA y queda como nica incognita MB. Obteniendo las siguientes ecuaciones:
M A ( A2 B 3 B 2 A3 ) = A1 B 3 B1 A3 M B ( A2 B 3 B 2 A3 ) = A2 B1 A1 B 2
Luego si sustituimos los ngulos por sus respectivos valores tendremos que:
MA =
A1 x1 x 3 x1 x3 A2 x3 x2 x3 x 2
MB =
A1 x1 x2 x1 x 2 A3 x3 x2 x3 x 2
19
Aplicaciones
a) Si I=cte. y p=cte. Se tiene que:
1
L
A1 = x1 = x1 = L 2
pL3 12
x 2 = x3 = L 3
pL2 8
x3 = x 2 = 2L 3
Y que:
A2 = A3 =
L 2
Sustituyendo obtengo:
pL3 L 2 L L L 1 2 12 2 3 2 3 pL 6 pL2 MA = = = L 2L 2 L L L 12 6 1 3 2 3 3 3 3 MB = MA = pL2 12
Y para la otra expresin si se realiza la sustitucin se obtiene que:
b) Si se tiene una carga distribuida de la forma que se indica sustituyendo se obtiene:
p
A a
MA
B b pa 2 12 a a2 4 3 L L2
MB
MA =
pa 2 12
a a2 6 8 + 3 L L2
MB =
c) Si se tiene una carga concentrada de la forma que se indica sustituyendo se obtiene:
A MA a Pab 2 MA = 2 L
b
B MB
Pa 2 b MB = 2 L
20
B) Barra con el extremo izquierdo empotrado. En este caso el extremo derecho est articulado pudiendo girar libremenete. El momento reaccin en ese extremo ser nulo. Luego la nica incgnita ser MA y la nica condicin conocida ser que el extremo A no gira.
p
A B
MA
La condicin en el extremo A, quedar expresada por la ecuacin:
A = A1 + M A A2 = 0
Despejando el momento MA y sustituyendo los ngulos A1 y A2 por sus valores se obtiene que:
MA =
A1 x1 A2 x2
Aplicaciones a) Si se tiene I=cte. y p=cte. entonces:
pL3 L M A = 12 2 L 2L 2 3
MA =
pL2 8
b) Si se tiene una carga distribuida como la indicada en la figura ser:
A MA a
b
pa 2 a MA = 2 8 L
21
c) Si se tiene una carga concentrada como la que se indica resulta:
A MA a Pab (L + b ) ) 2 L2 b
MA =
Anlogamente podran ser obtenidos los momentos cuando el extremo derecho es el que se encuentra empotrado. Para el clculo de los momentos de empotramiento perfecto (momentos freno) normalmente utilizaremos tablas. Estas contemplan las situaciones ms usuales de cargas y vnculos (publicacin de tablas y bacos)
22
DESARROLLO DEL METODO Desarrollaremos los pasos principales del mtodo, empleando un ejemplo simple. En este ejemplo algunos pasos no sern necesarios. Para estos pasos que por ahora no usaremos dejaremos nmeros libres.Luego veremos, para un caso ms general, en que consisten estos espacios que hemos dejado en blanco. Supongamos la siguiente estructura plana:
y P 1 1 2 2 3 3 x L
PASO 1- Definicin de los nodos Dividiremos la estructura (en este caso, una viga) en tres tramos, segn se indica en la figura. Llamaremos nodos a los puntos extremos de los tramos, con los cuales pueden stos ser definidos. En este caso tendremos 4 nodos. El nodo 2 fue colocado en el punto de aplicacin de la carga P para evitar tener cargas al interior de los tramos, ya que las frmulas vistas hasta ahora solo hacen referencia a fuerzas en los nodos. Ms adelante ser visto como se resuelve el problema con cargas al interior de los tramos. Tomaremos las longitudes de los tramos iguales entre si (L), para simplificar las expresiones. Para definir un nodo alcanza con indicar sus coordenadas. Los 4 nodos quedan definidos en un sistema de ejes x e y, como se indica: COORDENADAS X Y 0 0 L 0 2L 0 3L 0
NODO 1 2 3 4
PASO 2- Definicin de los elementos A los tramos les llamaremos elementos. Los elementos quedan definidos por sus dos extremos, o sea por dos nodos que llamaremos nodo inicial del elemento y nodo final del elemento. De acuerdo a las consideraciones anteriores, en nuestro ejemplo tendremos 3 elementos que podemos definir de la siguiente forma: ELEMENTO
1 2 3
NODO INICIAL 1 2 3
NODO FINAL 2 3 4
Al par de nmeros correspondientes a los nodos que definen un elemento le llamaremos conectividad. El sentido de este nombre proviene de considerar que el elemento conecta los dos nodos.
23
PASO 3 Definicin de las propiedades de los elementos Otro dato necesario para definir la estructura son las propiedades de los elementos. Las propiedades necesarias para encarar el problema, sern para cada elemento, el mdulo de elasticidad del material, el rea de la seccin y su inercia. En nuestro ejemplo para simplificar las expresiones consideraremos que todos los elementos tienen las mismas propiedades que notaremos E, A e I respectivamente. PASO 4 Definicin de los desplazamientos de los nodos y de las fuerzas aplicadas en los nodos. Con los datos que ya disponemos quedan definidos los desplazamientos y las fuerzas correspondientes a cada elemento. Cada uno de estos tiene 6 desplazamientos de los nodos, 6 fuerzas aplicadas en ellos y 6 ecuaciones que ya fueron vistas, que nos dan las fuerzas aplicadas en los nodos en funcin de los desplazamientos de los nodos:
vA uA
vB uB XA
YA
YB
XB
MA
MB
Para cada elemento tendremos 6 ecuaciones. En total tendramos 6 x 3 = 18 desplazamientos y 18 fuerzas. Pero los desplazamientos de los nodos resultan los mismos para ambas barras (esto sucede en los nodos 2 y 3). De modo que podemos reducir los desplazamientos de los nodos a 4 x 3 = 12 desplazamientos (en general se verificar que los desplazamientos de los nodos =N de nodos x 3). Los desplazamientos de los nodos se encuentran indicados en la figura:
v1 u1 1
1
v2
u2
v3
2
u3
v4
3
u4
En los nodos 2 y 3 tenemos fuerzas aplicadas sobre una y otra barra, pero en realidad lo que nos interesa es la fuerza total que esta aplicada sobre el nodo, de manera que debemos sumar estas fuerzas y tomar la resultante en cada nodo. De esa manera las resultantes o sea las fuerzas aplicadas en los nodos resultan tambin igual cantidad que los desplazamientos, o sea 12 en este caso.
Y1 X1
M1
1
Y2
2 X2
2
Y3
3 X3
3
Y4
4
X4
M2
M3
M4
De lo anterior resulta que tanto los desplazamientos de los nodos, como las fuerzas aplicadas en los nodos sern 12. De forma general sern el nmero de nodos multiplicado por tres. Es interesante sealar tambin que existe una correspondencia bien clara, una a una, entre fuerzas y desplazamientos.
24
PASO 5- Clculo de las ecuaciones de cada uno de los elementos. En general debern determinarse las ecuaciones correspondientes a cada elemento. Para ello debemos conocer las propiedades de cada elemento, o sea E, A e I y su longitud L que estar definida por la distancia existente entre el nodo inicial y el nodo final del elemento. En nuestro caso particular como hemos considerado A, E, I y L iguales para todos los elementos, las seis ecuaciones de un elemento sern las mismas que las de otro elemento, con la nica diferencia que A y B deben ser sustituidos por los nodos respectivos o sea: NODO ELEM ENTO 1 2 3 A 1 2 3 B 2 3 4
PASO 6- No es necesario para esta estructura, ser visto ms adelante. PASO 7- Clculo de las ecuaciones globales de toda la estructura Con las ecuaciones de cada barra y sumando las fuerzas correspondientes a diferentes elementos, en cada nodo, se obtienen las expresiones de 12 fuerzas aplicadas en los nodos en funcin de los 12 desplazamientos de los nodos. De esa manera se tiene un sistema de 12 ecuaciones. Estas ecuaciones ya no son ecuaciones de cada elemento sino que son ecuaciones generales de la estructura. En el nodo 1 de la estructura, las fuerzas aplicadas dependern exclusivamente de los desplazamientos del elemento 1 (o sea de los desplazamientos de los nodos 1 y 2), en el nodo 2 de los elementos 1 y 2 (o sea de los desplazamientos de los nodos 1, 2 y 3), en el nodo 3 de los elementos 2 y 3 (o sea de los desplazamientos de los nodos 2, 3 y 4) y en el nodo 4 del elemento 3 exclusivamente (o sea de los desplazamientos de los nodos 3 y 4). Veamos como se obtienen los trminos de las fuerzas en los nodos donde se da la superposicin (nodos 2 y 3 , fuerzas X2, Y2,M2 y X3, Y3, M3). Para ello tenemos que sumar los trminos de cada uno de los elementos que confluyen a cada uno de esos nodos.
Elemento 1
Elemento 2
X2=
EA EA EA EA EA EA EA u1 + u2 + u2 u3 = u1 + 2 u2 u3 L L L L L L L
Elemento 1
Elemento 2
Y2= 12
EI EI EI EI EI EI EI EI EI EI EI EI EI v1 6 2 1 + 12 3 v2 6 2 2 + 12 3 v2 + 6 2 2 12 3 v3 + 6 2 3 = 12 3 v1 6 2 1 + 2 12 3 v2 12 3 v3 + 6 2 3 L L L L L L L L L L L3 L L
Elemento 1
Elemento 2
M2= 6
EI EI EI EI EI EI EI EI EI EI EI EI EI v1 + 2 1 6 2 v2 + 4 2 + 6 2 v2 + 4 2 6 2 v3 + 2 3 = 6 2 v1 + 2 1 + 2 4 2 6 2 v3 + 2 3 L2 L L L L L L L L L L L L
25
Elemento 1
Elemento 2
X3=
EA EA EA EA EA EA EA u2 + u3 + u3 u4 = u2 + 2 u3 u4 L L L L L L L
Elemento 1 Elemento 2
Y3= 12
EI EI EI EI EI EI EI EI EI EI EI EI EI v2 6 2 2 + 12 3 v3 6 2 3 + 12 3 v3 + 6 2 3 12 3 v4 + 6 2 4 = 12 3 v2 6 2 2 + 2 12 3 v3 12 3 v4 + 6 2 4 L3 L L L L L L L L L L L L
Elemento 1 Elemento 2
M3= 6
EI EI EI EI EI EI EI EI EI EI EI EI EI v2 + 2 2 6 2 v3 + 4 3 + 6 2 v3 + 4 3 6 2 v4 + 2 4 = 6 2 v2 + 2 2 + 2 4 3 6 2 v4 + 2 4 L2 L L L L L L L L L L L L
Las 12 ecuaciones resultantes pueden ser colocadas formando una cuadrcula, de la siguiente forma:
1 12 6 EA u1 L 12 6 EI EI v1 6 2 1 L3 L +2 EI 1 L EA u2 L 12 6 EI EI v2 6 2 2 L3 L +2 EI 2 L EA u3 L 12 6 EI v3 L3 6 +2 EI 3 L2 EI 3 L EI v1 L3 +6 +4 EI 1 L2 EI 1 L +2 EA u2 L + 24 EI v2 L3 +8 EI 2 L +2 EA u3 L
+ 24 EI v L3 3
u1
X1 =
v1
u2 EA u2 L
v2
u3
v3
u4
v4
EA u1 L
Y1 = M1 = X2 = Y2 = M2 = X3 = Y3 = M3 = X4 = Y4 = M4 =
12 6
EI EI v2 + 6 2 2 L3 L +2 EI 2 L EA u3 L 12 6 EI v3 L3 +6 +2 EI 3 L2 EI 3 L EA u4 L 12 +8 EI 3 L + EA u4 L + 12 6 EI EI v4 6 2 4 L3 L +4 EI 4 L 6 EI EI v4 + 6 2 4 L3 L +2 EI 4 L
EI v1 L2
EI v2 L2
EI v1 L2
EI v3 L2
EI v2 L2
EI v4 L2
EI v3 L2
EI v4 L2
26
En definitiva se suman los trminos correspondientes a uno y otro elemento. Este procedimiento es conocido como el montaje de las ecuaciones. Si uno observa los trminos que aporta cada elemento ver que los mismos afectan una zona de la cuadrcula, o sea la zona donde se cruzan las fuerzas y los desplazamientos correspondientes (filas y columnas respectivamente) a los nodos inicial y final del elemento. Si los nodos del elemento son consecutivos (como sucede en nuestro ejemplo) la zona ser de 6 x 6 trminos, mientras que si los nodos no son consecutivos sern cuatro zonas de 3 x 3, como se indica en la figura siguiente.
P
1
P 2
3
2 3 3 3
1 2
Obsrvese que este procedimiento repite para cada elemento las mismas operaciones sin necesidad de realizar ninguna consideracin particular, lo que lo hace especialmente conveniente para ser utilizado por computadoras. Con este procedimiento podramos plantear las ecuaciones para cualquier prtico. PASO 8- Definicin de las restricciones de los nodos. La estructura siempre debe tener algunos vnculos a tierra, o dicho de otra manera existen nodos que tienen restringida la posibilidad de moverse. En nuestro ejemplo dados los empotramientos en los nodos 1 y 4 y el apoyo deslizante en el nodo 3, aparecern restricciones a los desplazamientos, que podemos expresar como: u1=v1=1=v3=u4=v4=4=0 Estas condiciones permiten eliminar de las ecuaciones todos los trminos que involucraban a estos desplazamientos, por cada condicin estaremos eliminando una columna de la cuadrcula. PASO 9- Definicin de las cargas aplicadas en los nodos. Los valores de las cargas aplicadas en los nodos, deben ser otro dato del problema. En nuestro ejemplo las fuerzas (fuerzas o momentos) son las siguientes: a) en el nodo 2 hay una fuerza vertical descendente por lo tanto Y2 =-P, en tanto que no hay fuerzas aplicadas horizontal o momento, o sea X2=M2=0 b) en el nodo 3 habr una reaccin vertical que desconocemos, pero sabemos que no hay fuerzas aplicadas horizontal ni momento, o sea X3=M3=0. Tenemos conocidas en total 5 fuerzas y 7 restricciones a los desplazamientos. Las fuerzas correspondientes a las restricciones son desconocidas y constituyen las reacciones producidas por los vnculos. (Cada vez que impongo una restriccin a los desplazamientos aparece la fuerza como incgnita y viceversa).
27
El sistema de ecuaciones queda ahora con 12 ecuaciones, 7 fuerzas incgnitas que son las reacciones o sea X1, Y1, M1, Y3, X4, Y4 y M4 y 5 desplazamientos incgnitas o sea u2, v2, 2, u3 y 3. Las ecuaciones quedan: X 1=
EA u2 L
Y1= 12
EI EI v + 6 2 2 3 2 L L EI EI v + 2 2 2 2 L L
(A)
M1 = 6
0 = X2 = 2
EA EA u2 u3 L L EI EI v + 6 2 3 3 2 L L
- P = Y2 = 24
(B)
0 = M2 = 8
EI EI 2 + 2 3 L L EA EA u2 + 2 u3 L L EI EI v 6 2 2 3 2 L L
(C)
0 = X3 =
(D)
Y3 = 12
0 = M3 = 6
EI EI EI v + 2 2 + 8 3 2 2 L L L
X4 =
(E)
EA u3 L EI 3 L2
Y4 = 6
M4 = 2
EI 3 L
PASO 10- No se necesita en nuestro ejemplo, se ver ms adelante. PASO 11- Resolucin de las ecuaciones. Clculo de los desplazamientos. El sistema anterior es un sistema de 12 ecuaciones con 7 fuerzas incgnitas y con 5 desplazamientos incgnitas. O sea en definitiva un sistema de 12 ecuaciones con 12 incgnitas. La igualdad entre incgnitas y ecuaciones permitir resolverlo. Dentro de este sistema se puede formar un subsistema de 5 ecuaciones (A), (B), (C), (D) y (E) con 5 incgnitas (desplazamientos u2, u3, v2, 2, 3) que podemos resolver, pues los trminos de la izquierda son conocidos en las 5 ecuaciones.
28
Obtenidos esos desplazamientos, las 7 ecuaciones restantes me permiten hallar las fuerzas no conocidas (o sea las reacciones: X1, Y1, M1, Y3, X4, Y4, M4). Si se tratara de otra estructura cualquiera la cantidad de desplazamientos incgnitas variara pero tendramos tambin el mismo nmero de fuerzas conocidas y podramos resolver el subsistema. Ello es debido a que donde hay un desplazamiento incgnita es porque no hay un vnculo que impida su desplazamiento y en consecuencia la fuerza aplicada correspondiente deber ser un dato del problema. La resolucin del subsistema, que es un sistema de ecuaciones lineales, es un problema que tiene diversas formas de ser resuelto por mtodos computacionales, con procedimientos sistematizados que pueden ser aplicados para cualquier caso. Para continuar con nuestro ejemplo podemos resolver manualmente el sistema de ecuaciones resultante. Para ello es conveniente observar que el subsistema de 5 x 5 puede a su vez ser subdividido pues las ecuaciones (A) y (D) nos vinculan los u sin que aparezcan los v ni los y las ecuaciones (B), (C) y (E) vinculan los v y los , sin que aparezcan las u, por lo que podemos resolver primero las ecuaciones (A) y (D) y luego en forma separada las ecuaciones (B), (C) y (E). Veamos las dos ecuaciones en u: queda: EA Sustituyo en (D) u3, nos queda: Luego se concluye que; Si multiplico (A) por
L
2u2 = u3
EA EA EA u +4 u2 = 0 3 u = 0 u2 = 0 2 L L L 2
u2=u3=0
Veamos ahora las otras tres ecuaciones:
Si multiplico (C) por
L 2 EI
resulta:
3 = 4 2
6 EI EI EI v2 + 2 2 32 2 = 0 2 L L L
Sustituyendo en (E) obtengo:
Si ahora multiplico por
L , queda: EI
v2 30 2 = 0 v 2 = 5 2 L L EI EI 5 2 24 2 2 2 L L
y entonces
Sustituyendo en (B) tendremos que: P = 24 Y luego sustituyendo resulta:
PL2 = 96 2 EI
PL2 3 = 4 2 = 24 EI v 2 = 5 2 L = 5 PL3 PL2 2 = 96 EI 96 EI
Resumiendo, podemos decir que la solucin buscada del sistema de ecuaciones lineales es la siguiente:
u 2 = u3 = 0
2 =
PL2 96 EI
3 =
PL2 24 EI
v2 =
5 PL2 96 EI
29
PASO12- Resolucin de las ecuaciones. Clculo de las reacciones. Conocidos los 5 desplazamientos incgnitas para calcular las reacciones alcanza con utilizar las 7 ecuaciones restantes. Sustituyendo los desplazamientos por los valores calculados en el paso anterior resulta:
X1 = X 4 = 0 Y1 = 9 P 16 7 PL 24
Y3 =
11 P 16 P 4 PL 12
Y4 = M4 =
M1 =
PASO 13- No se necesita en nuestro ejemplo, se ver ms adelante. PASO 14- Clculo de las fuerzas aplicadas en los extremos de cada elemento. Conociendo los desplazamientos de los extremos de cada elemento y empleando las ecuaciones de cada elemento se pueden calcular las fuerzas aplicadas sobre cada elemento en sus extremos. Para el elemento 1 ser:
YA XA
YB XB
MA XA = 0
YA =
MB
5PL3 6 EI PL2 12EI 3 + 2 L 96 EI L 96 EI 5 PL3 2 EI PL2 6 EI 2 + L 96 EI L 96 EI
9 = 16 P 7 = 24 PL
MA =
De igual modo se puede continuar con las restantes fuerzas aplicadas en el elemento 1 en el punto B, as como en los restantes elementos. PASO 15- No se necesita en nuestro ejemplo, se ver ms adelante. PASO 16- Impresin de Resultados Los programas normalmente imprimen los desplazamientos de los nodos, las reacciones en los apoyos y las fuerzas aplicadas en los extremos de cada elemento, calculadas en los pasos anteriores.
30
PASO 17- Diagramas de solicitaciones de los elementos y deformada de la estructura. Con los resultados obtenidos podemos plantear los diagramas de solicitaciones y la deformada de la estructura. En muchos casos estos diagramas son realizados por el propio programa, en nuestro caso los realizaremos manualmente. Los diagramas de solicitaciones obtenidos son los siguientes.
9P 16
P 4
1 2 3 4
7P 16
7 PL 24
1 2
PL 6
3
PL 12
4
13PL 48
En esta etapa haremos las verificaciones que corresponden. Sea cual sea el mtodo de clculo:Fx=0 (suma de cargas y reacciones horizontales), Fy=0 (suma de cargas y reacciones verticales), M=0 (suma de momentos con relacin a un punto cualquiera, producidos tanto por fuerzas como por momentos, de todas las cargas y reacciones) y relacionaremos la concavidad de la elstica en funcin del diagrama de momentos. La deformada tiene la siguiente forma:
3 0
1 2 3 p.i. 4
Elstica
p.i. p.i.
2 0
p.i. = punto de inflexin
31
ETAPAS DEL MTODO * * * PASO 1- Ubicamos los nodos. (Determino cantidad y coordenadas). PASO 2- Definimos los elementos. (Cantidad y conectividades). PASO 3- Definimos las propiedades de los elementos (rea, inercia y mdulo de elasticidad). PASO 4- Quedan as definidos los desplazamientos y las fuerzas (no sus valores, pero si su disposicin). En nuestro ejemplo sern 12 desplazamientos y 12 fuerzas: N de nodos por 3 (4x3). PASO 5- Se calculan los trminos de la rigidez (relaciones entre fuerzas y desplazamientos para cada barra: 6 x 6). PASO 6- (Transformacin de coordenadas, se ver ms adelante). PASO 7- Se construye la rigidez global (ecuaciones generales de toda la estructura). En nuestro ejemplo, llegamos a un sistema de 12 ecuaciones con 12 desplazamientos y 12 fuerzas: 12 x12. PASO 8- Definimos las restricciones producidas por los vnculos a tierra (7 desplazamientos en nuestro ejemplo) y eliminamos los trminos correspondientes en las ecuaciones. PASO 9- Ubicamos las cargas en los nodos. PASO 10- (Se relaciona con cargas que no estn en los nodos, se ver ms adelante). PASO 11- Resolvemos el sistema: Hallamos los desplazamientos desconocidos: 5 en nuestro ejemplo, sistema de 5 ecuaciones. PASO12- Con los desplazamientos hallados utilizamos las 7 ecuaciones restantes. Obtenemos las fuerzas desconocidas o sea las reacciones. PASO 13- (Transformacin de coordenadas globales a locales: se ver ms adelante). PASO 14- Con los desplazamientos conocidos vamos a las ecuaciones de cada barra obtenidas en el PASO 5 y hallamos las fuerzas en los extremos de cada una. PASO 15- (Se ver ms adelante). PASO 16- Resultados: Imprimimos desplazamientos en los nodos, reacciones y las fuerzas en los extremos de cada elemento. PASO 17- En el caso de este programa dibujamos manualmente diagramas y verificamos reacciones.
* + +
* +
Instancias en que introducimos datos al programa. Instancias en que obtenemos datos del programa
32
CASOS EN QUE LOS ELEMENTOS NO SON PARALELOS Para poder generalizar lo visto anteriormente debemos resolver las dos limitaciones que tiene el ejemplo anterior. Ellas son que no haba cargas al interior de los elementos (caso que ser visto ms adelante) y que los elementos eran paralelos. Debido a que los elementos eran paralelos los desplazamientos en un extremo de un elemento coincidan con los desplazamientos en los extremos del elemento contiguo. De esa manera, tenamos 3 elementos, pero no tenamos 3x6=18 desplazamientos pues en los nodos 2 y 3 coinciden los desplazamientos de un elemento con los del otro. Solo tenamos 12 desplazamientos (3 x N de nodos, con N de nodos=4). Para las fuerzas en los nodos se haca la misma simplificacin, pues las fuerzas sobre cada barra se podan sumar obteniendo las fuerzas totales aplicadas en lo nodos. De modo que resultaban tambin 12 fuerzas en los nodos. Cuando los elementos no son paralelos, como es el caso de la figura, esta simplificacin ya no es posible, pues los desplazamientos de un extremo no sern los mismos que los del otro extremo. Para resolver esta dificultad es conveniente establecer dos sistemas de coordenadas: uno Local y otro Global. El sistema de coordenadas Locales se establece con el eje x coincidente con el eje del elemento y el eje y perpendicular al anterior. El sistema de coordenadas Globales ser el utilizado para definir los nodos, normalmente elegido con el eje XG horizontal y el eje YG vertical como se indica en la figura.
YG
Y
B
XG
Usaremos la notacin siguiente: Para el nodo A: uA, vA, A en coordenadas locales. uAG, vAG, AG en coordenadas globales. Para el nodo B: uB, vB, B en coordenadas locales. uBG, vBG, BG en coordenadas globales. Tenemos entonces los desplazamientos y fuerzas en coordenadas locales que son:
vB
uB
B
XB YB
vA
uA
M
A
YA X
A
33
Los desplazamientos y fuerzas en coordenadas globales sern:
v BG u BG BG v AG u AG M BG AG Y AG X AG M AG YBG X BG
La resolucin del problema pasa por referir las relaciones fuerzas-desplazamientos (que ya conocemos en coordenadas locales) a coordenadas globales. O sea relacionando XAG, YAG, MAG, XBG, YBG y MBG, con uAG, vAG, AG, uBG, vBG y BG. Las relaciones en coordenadas locales para las fuerzas en A son:
XA =
EA EA uA uB L L EI EI EI EI v A + 6 2 A 12 3 v B + 6 2 B 3 L L L L EI EI EI EI v A + 4 A 6 2 vB + 2 B 2 L L L L
Expresiones (1)
Y A = 12 MA =6
Del mismo modo se pueden expresar las fuerzas en B:
XB =
EA EA uA + uB L L EI EI EI EI v A 6 2 A + 12 3 v B 6 2 B 3 L L L L
YB = 12 MB = 6
EI EI EI EI v A + 2 A 6 2 vB + 4 B 2 L L L L
Veremos como pasamos de las expresiones en coordenadas locales a coordenadas globales. Supondremos primero que tenemos un desplazamiento uAG y luego que tenemos uno vAG.
34
Veremos en coordenadas locales como resultan estos desplazamientos. Para ello descompondremos vAG, y uAG segn los ejes locales:
v AG . cos u AG . cos u AG u AG .sen u AG v AG .sen
u A = u AG . cos v A = u AG .sen
A=AG Si superponemos ahora los dos desplazamientos tendremos que: uA=uAG cos + vAG sen vA=-uAG sen + vAG cos A = AG Anlogamente para el nodo B resulta: uB=uBG cos + vBG sen vB=-uBG sen + vBG cos B = BG
u A = v AG .sen v A = v AG . cos
Un giro del extremo del elemento AG representar en coordenadas locales el mismo giro, esto es:
Expresiones (2)
Si invierto el problema y quiero poner las coordenadas globales en funcin de las coordenadas locales, tengo que pasar de una a otra coordenada, ahora con un ngulo -. Sabiendo que: Tendr las siguientes expresiones: uAG = uA cos - vA sen vAG = uA sen + vA cos AG = A uBG = uB cos - vB sen vBG = uB sen + vB cos BG = B cos - = cos sen - = sen
Este razonamiento se realiz con los desplazamientos, pero si hubiramos razonado con las fuerzas aplicadas hubiera sido una situacin totalmente anloga. Luego la relacin de las fuerzas referidas en coordenadas globales y locales ser: XAG=XA cos - YA sen YAG = XA sen + YA cos M AG =M A Y en el nodo B: XBG=XB cos - YB sen YBG = XB sen + YB cos M BG =M B Expresiones (3)
35
Ahora podemos sustituir en las expresiones (1), los valores de uA, vA, A, uB, vB y B de las expresiones (2). Me quedan XA, YA y MA (fuerzas en coordenadas locales) en funcin de los desplazamientos en coordenadas globales. Con las expresiones de XB, YB y MB puedo hacer lo mismo. Finalmente puedo sustituir los XA, YA, MA, XB, YB y MB (obtenidos de las ltimas sustituciones) en las expresiones (3) y quedarn relacionadas las fuerzas en coordenadas globales con los desplazamientos en coordenadas globales como queramos. La expresin que se obtiene es la que emplea el programa para realizar el cambio de las ecuaciones de coordenadas locales a coordenadas globales. Para diferentes elementos variarn las propiedades del elemento (E, A, I), su longitud (L) y el ngulo y con ello los coeficientes de las expresiones que relacionan fuerzas y desplazamientos globales y entonces puedo reducir los desplazamientos incgnitas, como en el caso visto anteriormente a 3 x N de nodos. Anlogamente las fuerzas en coordenadas globales tendrn las mismas direcciones y pueden ser sumadas en cada nodo, igual que en el caso visto anteriormente. Este pasaje de las ecuaciones de un sistema de coordenadas a otro debe ser realizado antes de montar las ecuaciones globales de la estructura y es uno de los pasos que habamos dejado en blanco. Podemos resumirlo en: PASO 6- Pasaje de las ecuaciones que relacionan desplazamientos y fuerzas sobre los extremos de las barras de coordenadas locales a coordenadas globales. Cabe sealar finalmente que cuando tenga la solucin de los desplazamientos en coordenadas globales (paso 11), antes de calcular las fuerzas en los extremos de cada barra (paso 14) con las ecuaciones de cada barra (que estn en coordenadas locales), debo pasar los desplazamientos del elemento de coordenadas globales a coordenadas locales. Esto puede resumirse: PASO 13- Conversin de los desplazamientos de los nodos hallados en coordenadas globales para las coordenadas locales de cada barra. CARGAS QUE NO ESTN EN LOS NODOS.
Veamos ahora el otro caso que nos quedaba pendiente. La idea de este procedimiento se aplica en clculo matricial y tambin se aplica en el mtodo de Cross. Para resolverlo descompondremos el estado de cargas en dos estados (a y b) de manera que cada uno de ellos pueda ser resuelto sencillamente. La suma de los dos estados ser el verdadero estado de cargas aplicado sobre la estructura.
a)
b)
+ - Fep
Fep
36
En el estado a) consideraremos aplicadas todas las cargas que actan sobre la estructura y consideraremos que todos los nodos se encuentran fijos, o sea impedidos de desplazarse y de girar. En los nodos fijados se producirn reacciones, que evitarn los desplazamientos de los nodos de la estructura. Las fuerzas aplicadas en los nodos sobre las barras son las fuerzas de empotramiento perfecto (Fep), que ya hemos estudiado. Estas fuerzas de empotramiento perfecto pueden ser calculadas barra por barra. O sea resumiendo, tendremos en este estado que los deplazamientos son todos nulos y que las solicitaciones en los nodos de las barrras son las fuerzas de empotramiento perfecto. Finalmente en cada nodo pueden ser calculadas las reacciones producidas sumando las fuerzas de empotramiento perfecto de todas las barras que confluyen al nodo. El estado b) deber tener en cada nodo una carga igual y contraria a la suma de las fuerzas de empotramiento perfecto obtenidas en la parte a). O dicho de otra manera, tendr aplicada en cada nodo la suma de las descargas (supuestas las barras con empotramiento perfecto) de cada una de las barras que llegan al nodo. De esa manera al superponer los dos estados, las fuerzas de empotramiento perfecto se contrarrestan con las descargas y solo quedan las cargas verdaderamente aplicadas sobre la estructura. Esto es necesario pues nosotros imaginamos en la parte a) que existan reacciones en todos los nodos, pero en la realidad esto no es as. Se trata de una suposicin para facilitar el clculo. El estado de cargas a) puede ser calculado barra por barra empleando frmulas analticas o a travs de tablas. El estado de cargas b) solo tiene cargas en los nodos por lo que puede ser calculado sin problemas. El diagrama de momentos y los deplazamientos que tenga la estructura ser la suma de a) y b). Resumiendo puede decirse que descompongo el estado de cargas en dos estados que luego superpongo. El primer estado no significa ningn desplazamiento de los nodos y produce fuerzas de empotramiento perfecto en los nodos. Estas fuerzas calculadas por elementos, convertidas a coordenadas globales, sumadas y cambiadas de signo (descargas) se incorporan a las carga en los nodos (Paso 10). De esa manera el programa calcula el estado b). Finalmente debemos realizar la suma de los dos estados. Esto se realiza en el paso 15 luego de calculados los desplazamientos en coordenadas globales (Paso 11), de haberlos llevado a coordenadas locales (Paso 13) y de haber calculado los esfuerzos en los extremos de los elementos (Paso 14) producidos por los desplazameintos (estado de cargas b). En el paso siguiente debo agregar los esfuerzos producidos por el estado de cargas a) (que ya fueron calculados en 10) para obtener los esfuerzos totales. A los desplazamientos calculados en b) no hay que agregarle nada pues en el estado a) los nodos no tienen desplazamientos. Resumiendo lo anterior, los pasos que faltaban quedan definidos por: PASO 10- Calculo los momentos y fuerzas de empotramiento perfecto en cada barra y los guardo para introducirlos en el paso 15. Adems los cambio de signo para obtener las descargas y los paso a coordenadas globales y los agrego como cargas en los nudos. PASO 15- Al estado obtenido por las cargas aplicadas en los nodos (estado b) debo sumarle el estado a) ya calculado en el paso 10. Sumando los dos estados obtengo las solicitaciones totales en los nodos.
37
CONSIDERACIONES SOBRE EL PROGRAMA A) ENTRADA Y SALIDA DE DATOS El programa admite la entrada de los datos por archivo o teclado, la salida de los resultados puede ser por pantalla, archivo o impresora. Se recomienda usar la salida por archivo, pues no se pierde la informacin, incluso el archivo puede ser impreso posteriormente, usando cualquier editor, si uno lo desea. En la salida por pantalla no caben todos los resultados en la pantalla, solamente se ve el final de ellos. Solo es til cuando se estn haciendo pruebas y se quiere ver si corre el programa. La salida por impresora puede no funcionar (depende de la impresora que se dispone). En cuanto a la entrada se recomienda tambin usar la entrada por archivo. El archivo de entrada debe ser editado y deben colocarse los datos en la forma correcta, ello debe hacerse antes de correr el programa. Si cuando se corre el programa se encuentra que existe algn error del archivo de entrada, este puede ser editado nuevamente y se corrigen solamente los errores. En cambio si la entrada de datos se hace por teclado y se comete algn error, para correr otra vez el programa los datos debern ser digitados todos nuevamente. En resumen se sugiere entrar y salir por archivo. Usaremos archivos con terminacin .DAT para los archivos de datos y terminacin .SOL para los archivos de salida de datos o solucin del problema. B) VERIFICACION CON LA SALIDA DE DATOS El programa aunque no ruede completo (se interrumpa su ejecucin) siempre va a producir algn archivo de salida de datos. Esta salida debe ser editada luego de correr el programa, en ella puede verificarse hasta donde los datos ledos son correctos. De esa manera se determina fcilmente el lugar del archivo de datos donde se encuentra el error y en el que debemos realizar la modificacin correspondiente. Este proceso contina hasta que la salida de datos est completa. C) ERROR EN LA ESTRUCTURA El programa puede leer todos los datos e imprimirlos todos, de forma aparentemente correcta y no correr totalmente, esto es interrrumpirse sin dar todos los resultados. Generalmente, cuando esto ocurre, en algn lugar est dividiendo entre 0 y esto indica que el sistema de ecuaciones no tiene solucin. En este caso el formato de los datos est siendo correcto pero no sus valores. Y si los datos estuvieran bien y contina dando error, entonces la que est mal es la estructura diseada. Seguramente le falta algn vnculo o algn elemento. No es una estructura estable y por eso no puede ser resuelta. D) UNIDADES Las unidades son solicitadas por el programa pero este solo las guarda y las devuelve en la salida. La coherencia de las unidades empleadas es responsabilidad nuestra. Debemos elegir una unidad para las longitudes y otra para las fuerzas (por ejemplo centmetros y decanewton). Las dems magnitudes debern ser expresadas en funcin de estas unidades (reas en centmetros cuadrados, inercias en centmetros a la cuarta, momentos en decanewton centmetro, mdulo de elasticidad en decanewton por centmetro cuadrado). Los ngulos son adimensionados y se expresan en radianes. E) VERIFICACION DE LOS DATOS Es conveniente verificar los datos, para ello uno deja a un lado el esquema de la estructura y empleando solamente el archivo de salida vuelve a construir la estructura, coloca sus apoyos y coloca sus cargas. Luego se coteja con el esquema inicial para verificar si est todo correcto.
38
F) VERIFICACION DE LAS REACCIONES Es conveniente verificar si las reacciones neutralizan efectivamente las cargas externas, para ello se proyectan las reacciones y las cargas sobre el eje x, sobre el eje y, y finalmente se toma su momento en relacin a algn punto. G) DIAGRAMAS DE SOLICITACIONES Los diagramas de fuerzas axiles, cortante y momentos deben ser dibujados a mano, con los datos que proporciona el programa para los extremos de las barras y teniendo en cuenta las cargas aplicadas en la barra. H) DEFORMADA DE LA ESTRUCTURA El programa proporciona los desplazamientos y giros de los nodos, con estos resultados y los diagramas de los momentos (que nos dan una idea de la concavidad de la deformada de los elementos) se puede dibujar la deformada de la estructura. Esta es una verificacin muy conveniente. I) CARGAS El programa admite tres tipos de cargas. En primer lugar se introducen los datos de ls carga en los nodos (fuerzas y momentos). Estas cargas estan referidas en coordenadas globales, sern positivas segn el eje x global, segn el eje y global y en sentido antihorario para los momentos. En segundo lugar admite cargas distribudas (constantes) en las barras, stas deben ser perpendiculares a las barras y estarn referidas en coordenadas locales de la barra, segn las convenciones que veremos ms adelante. En tercer lugar admite cargas concentradas en las barras, stas deben ser perpendiculares a las barras y estarn referidas en coordenadas locales de la barra, segn las convencionees que veremos ms adelante. J) CONVENCIONES PARA CARGAS EN LAS BARRAS Las cargas en las barras estarn referidas siempre en coordenadas locales. Convendremos que para analizar las cargas y luego los esfuerzos en una viga uno debe colocarse de frente a la viga y viendo el primer nodo de la misma a nuestra izquierda. Por ejemplo para la viga 1,2 ser:
F
2 p 1
b c dor rva e s Ob
Las cargas, tanto distribuidas como concentradas, que apuntan hacia el observador, tendrn por convencin signo negativo (como es el caso de las indicadas en la figura). Las distancias sern medidas siempre desde el primer nodo. Para cargas distribudas (constantes) se deber conocer el nmero de la barra, la carga distribuda con signo, la distancia desde el punto donde se inicia la carga al primer nodo y la distancia desde el punto donde terminan las cargas al primer nodo (de acuerdo a la figura sern a y b respectivamente). Para carga concentrada se deber conocer el nmero de la barra, la carga concentrada con signo y la distancia desde el punto de aplicacin al primer nodo (de acuerdo a la figura ser c).
39
K) CARGAS NO PERPENDICULARES Si hay cargas en los elementos, no perpendiculares al elemento, la carga puede ser descompuesta en una componente normal a la barra y otra de tipo axial, como se indica en la figura siguiente:
q
=
qN
+
qL qL q qN
El programa que estamos empleando admite las cargas perpendiculares, pero no admite las cargas axiales. (Esta es una limitacin de este programa, otros programas admiten este tipo de cargas). Veremos como se resuelve el problema en el caso de las cargas axiales: Para ello podemos superponer dos estados de carga. Un estado a) en el que no hay ningn desplazamiento de los nodos y aparecen solamente fuerzas axiles de empotramiento perfecto. Otro estado b) en el que aparecen las cargas de empotramiento perfecto con signo cambiado (descargas) en los nodos. a) b)
F2 -F2
L q
F1
-F1
En el caso q=cte. Ser F1 F2 qL = = Para el caso a) el diagrama de fuerza axil ser el siguiente:
qL
qL
Los dems esfuerzos en la barra y en todas las dems barras son todos iguales a cero. a) Puede ser resuelto manualmente, b) Puede ser resuelto por el programa si colocamos las descargas que corresponden en los nodos.
40
La resolucin de a) depende de las cargas aplicadas. Para carga distribuda constante a lo largo de toda la barra las fuerzas de empotramiento perfecto y los diagramas de fuerzas axiles son los indicados en la figura. Luego de tener los resultados obtenidos con el programa de la parte b) o sea de las descargas consideradas en los nodos, junto lgicamente con todas las dems cargas que actan sobre la estructura, se puede al final superponer manualmente los diagramas de fuerza directa de la carga a) y luego obtener los diagramas de solicitaciones totales. L) CONVENCIONES DE SIGNOS PARA LOS DIAGRAMAS DE ESFUERZOS EN LAS BARRAS Normalmente se ha usado para los diagramas de cortante y momento la convencin que se expresa en la figura:
+ _ _
Esta convencin, no debe confundirse con la convencin empleada para descargar las cargas sobre los nodos, segn la cual los momentos son del mismo sentido cuando siguen el sentido horario o antihorario. (En este caso hemos convenido que para el mtodo matricial el sentido antihorario sera el positivo y que para el mtodo de Cross sera positivo el sentido horario). En el caso de los diagramas de momento, la convencin sobre el sentido de los momentos que se ha empleado viene dada por la forma que se flexan los elementos, de manera que los diagramas se dibujan hacia el lado que se encuentran las fibras traccionadas. Nosotros ahora vamos a hacer un acuerdo sobre los signos de los diagramas de cortante y momento. Los cortantes dibujados hacia arriba, sern de signo positivo y cuando sean hacia abajo sern negativos. En relacin con los momentos acordaremos que son positivos cuando estn dibujados hacia abajo y son negativos cuando estn hacia arriba. Estas son las convenciones ms normalmente usadas. Cuando la viga no es horizontal usaremos las mismas convenciones, ubicndonos en la posicin del observador ya expuesta anteriormente (de frente a la barra y con el nodo inicial a la izquierda). Para los esfuerzos axiles consideraremos que son positivos cuando son de traccin y negativos cuando son de compresin. En funcin de lo anterior para un pequeo tramo de una barra los sentidos positivos sern los indicados en la figura: M
f
N V
i = nodo inicial f = nodo final
s ob i
r do va r e
V M N
41
F) MEDIO ANCHO DE BANDA Vamos a comparar para la misma estructura dos numeraciones de nodos diferentes, lo haremos con la estructura del ejemplo ya analizado anteriormente. Para la estructura I tenamos, segn ya fue I P visto que cuando colocbamos las doce fuerzas en funcin de los doce 1 2 3 4 desplazamientos, la relacin poda ser agrupada en 16 cuadrados de 3x3, mostrando la influencia de los desplazamientos de un nodo sobre las fuerzas que se producen en otro nodo. De esa manera poda subdividirse II P esa relacin de 12 por 12 en 16 partes en las 1 4 2 3 que cada una expresa la accin de tres desplazamientos sobre tres fuerzas. En la estructura I aparecan 6 cuadrados que tienen todo cero, segn se indica en la figura. Para la estructura II cambian la ubicacin de dichos cuadrados pero tambin aparecen los 6 cuadrados igual a cero, como indicamos en la figura.
X MAB X X X 0 MAB 0 X X X X 0 0 X 0 0 X
MAB=6
MAB =12
0=cero X=diferente de cero
En el caso I puede observarse una banda en el centro rodeada de ceros. Podemos definir el medio ancho de banda segn se indica en la figura. En el caso II la banda vendra a ser todo el cuadrado y el medio ancho de banda ser el doble que en el caso anterior. Para la resolucin del sistema de ecuaciones el nmero de operaciones necesarias es menor cuando el medio ancho de banda es menor, un nmero menor de operaciones implica menos tiempo de clculo y adems implica cometer menos errores de redondeo, o sea resultados mas rpidos y ms precisos. El menor ancho de banda permite tambin disminuir el espacio de memoria que se utiliza, o sea con la misma memoria empleada se puede resolver una estructura mayor. De manera que debemos buscar que nuestro medio ancho de banda sea lo mas pequeo posible. Esto lo lograremos si buscamos que la diferencia entre dos nodos que estn contiguos no sea muy grande. En la estructura I la mxima diferencia entre nodos contiguos es de 1, en cambio en la estructura II es de 3. Cuando se realiza la numeracin de los nodos debe buscarse que no queden contiguos dos nodos con diferencia de numeracin muy grande. El programa da el medio ancho de banda de la estructura, para que sea tenido en cuenta.
42
En el caso que se muestra a continuacin es claro que es mejor la solucin II.
I 5 4 3 2 1 6 7 8 9 10
II 9 7 5 3 1 10 8 6 4 2
Mxima diferencia=9-2=7
Mxima diferencia=2
N) VINCULOS Los vnculos se expresan indicando el nodo, luego la restriccin segn x, segn y y finalmente la restriccin al giro. El nmero 0 indica que no hay restriccin mientras que el nmero 1 indica que existe restriccin, o sea el nudo esta impedido de moverse en esa direccin. Por ejemplo 2,0,1,0 indica que el nodo 2 no tiene restricciones segn x, que segn y esta impedido de moverse y que puede girar libremente. Sera un vnculo de este tipo:
2
Si en cambio estuviera empotrado entonces las restricciones del nodo debieran ser expresadas asi: 2,1,1,1 2
O) RESPONSABILIDAD Los resultados obtenidos siempre deben ser verificados y analizados. La computadora realiza un clculo segn nuestras indicaciones y no tendr ni ella ni el programa, ninguna responsabilidad sobre el proyecto estructural realizado. Del mismo modo que el uso de las calculadoras de mano tampoco garantiza la correccin del proyecto. La computadora es una herramienta ms poderosa para el clculo y esta puede ser su ventaja. Pero debe quedar claro que es solo una herramienta. Pero el diseo estructural ser por un largo tiempo responsabilidad exclusiva del tcnico. Este debe conocer si las hiptesis son adecuadas, saber sus limitaciones, ver si las cargas son correctas, debe verificar crticamente resultados, etc. En el diseo de una estructura no hay solo clculos mecnicos, hay un conjunto de conceptos y hay tambin aspectos de creacin que solo puede realizar un tcnico. Esto vale para cualquier mtodo de clculo. Visto de un ngulo diferente puede decirse que frente al colapso de una estructura por problemas de clculo habr una responsabilidad moral y tica del tcnico, pero tambin esta responsabilidad puede llegar al terreno legal y hasta penal. Volviendo a verlo del ngulo positivo puede decirse que durante muchos aos seguir siendo necesario el tcnico para el diseo estructural, difcilmente llegue a ser posible que un buen operador PC pueda sustituirnos. Por lo menos por algunas dcadas esto parece casi imposible.
43
EN RELACION CON LA ENTRADA DE DATOS
* * *
Nombre del problema. Cantidad de nodos. Cantidad de elementos.
COORDENADAS DE LOS NODOS * Nmero del nodo, coordenada x, coordenada y. (Poner en orden los nodos desde el nmero 1 hasta el ltimo, un rengln para cada uno) CONECTIVIDADES * Nmero del elemento, nmero del nodo inicial, nmero del nodo final. (Poner en orden los elementos desde el nmero 1 hasta el ltimo, un rengln para cada uno). RESTRICCIONES * Cantidad de nodos con restricciones. * Nmero del nodo, restriccin segn x, restriccin segn y, restriccin al giro. (0 significa sin restriccin, 1 con restriccin, colocar un rengln por cada nodo restringido). PROPIEDADES DE LAS BARRAS * Cantidad de tipos diferentes de barras (en relacin a sus propiedades geomtricas, rea e inercia y a su mdulo de elasticidad). Se deben utilizar las mismas unidades en que se especificaron las cotas. * Area, inercia, mdulo de elasticidad. (Propiedades del primer tipo de barras). * Cantidad de barras con estas propiedades. * Indicar uno a uno los nmeros de las barras que tienen estas propiedades. (Si hay ms de un tipo de barra, se repiten los tres ltimos renglones tantas veces como sea necesario, hasta terminar) CARGAS EN LOS NODOS (se indican en coordenadas globales). * Cantidad de nodos cargados. (si no hay ninguno, ingresar 0). * Nodo, fuerza segn x, fuerza segn y, momento. (Un rengln para cada nodo cargado). CARGAS DISTRIBUIDAS EN LOS ELEMENTOS (Se indican en coordenadas locales) * Cantidad de cargas distribudas (si no hay ninguna ingresar 0) * Nmero del elemento, valor de la carga distribuida, distancia desde el nodo inicial al principio de la carga, distancia desde el nodo inicial al final de la carga. (un rengln para cada carga). CARGAS CONCENTRADAS EN LOS ELEMENTOS (Se indican en coordenadas locales). * Cantidad de cargas concentradas en los elementos (si no hay ninguna ingresar 0) * Nmero del elemento, valor de la fuerza, distancia desde el nodo inicial a la fuerza (un rengln para cada carga a ingresar). EN RELACIN CON LA SALIDA DE DATOS
* * * * *
Repite todos los datos ingresados de la estructura. Medio ancho de banda de la matriz. Desplazamientos nodales (segn orientacin de los ejes de coordenadas globales). Reacciones (segn orientacin de los ejes de coordenadas globales). Fuerzas y momentos en los extremos de los elementos (para dibujar diagramas, segn convencin indicada en el punto L de consideraciones sobre el programa).
44
EJEMPLO DE ARCHIVO DE DATOS
prtico con ppropio (archivo de datos) 4 3 1,0,0 2,450,600 3,1350,0 4,1350,600 1,1,2 2,3,4 3,2,4 2 1,1,1,1 3,1,1,1 3 600,45000,200000 1 1 800,106667,200000 1 2 700,71458,200000 1 3 4 1,-270,-360,0 2,-270,-360,0 3,0,-600,0 4,0,-600,0 2 1,-0.9,0,750 3,-5.35,0,900 1 1,-135,450
unidades utilizadas para el ingreso de datos: cm daN
45
III
0,20x0,35
2
7,5 0
1
4,50 9,00
II
0,2 0x 0.3 0
ESQUEMA DE CARGAS
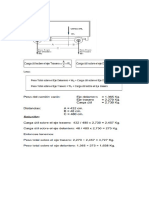
descomposicin del peso propio 90daN/m 150 daN/m 120daN/m
535 daN/m = (360+175) daN/m 150 daN/m
III
II
135daN
4,5 0
90 daN/m 120daN/m
200daN/m
6,00
0,20x0,40
46
CONSIDERACION DE LA COMPONENTE AXIL DEL PESO PROPIO. APLICACIN DEL ARTIFICIO EXPUESTO, PARA LOS ELEMENTOS I Y II.
pl 120 7,50 = = 450daN 2 2 pl = 450daN 2
l=
7,5 0
pdaN / m
120daN / m
pdaN / m
120daN / m
pl 120 7,50 = = 450daN 2 2
Situacin a Se resuelve manualmente
pl = 450daN 2
Situacin b Se ingresa al programa
ESQUEMA DE CARGAS TAL COMO SE INGRESAN AL PROGRAMA
450daN =
(120 7,50 )
2
360daN
270daN
360daN
270daN
5,35 daN / cm
600daN =
(200 6)
2
2
135daN
0,90daN / cm
III
360daN
270daN
II 3
600daN =
(200 6)
2
47
FACULTAD DE ARQUITECTURA Curso de Estabilidad II 1999 Ejercicios de Prticos
prtico con ppropio Las unidades de longitud son: cm Las unidades de fuerza son: daN Nmero de nodos 4 Nmero de elementos 3 Nodo 1 2 3 4 Elemento 1 2 3 Coordenada x .00 450.00 1350.00 1350.00 Nodo inicial 1 3 2 Nodo final 2 4 4 Coordenada y .00 600.0 .00 600.00
Clave para los tipos de apoyo de los nodos: 1 = apoyo, 0 = libre Nodo 1 3 Elemento 1 2 3 Apoyo en x 1. 1. Area .60000E+03 .80000E+03 .70000E+03 Apoyo en y 1. 1. Inercia .45000E+05 .10667E+06 .71458E+05 Apoyo en r 1. 1. Mdulo .20000E+06 .20000E+06 .20000E+06
Fuerzas aplicadas en los nodos Nodo 1. 2. 3. 4. Carga x -270.000 -270.000 .000 .000 Carga y -360.000 -360.000 -600.000 -600.000 Momento .000 .000 .000 .000
48
Fuerzas en los elementos:Carga distribuda Elemento 1. 3. Carga dist. -.900 -5.350 Principio de la carga .000 .000 Fin de la carga 750.000 900.000
Fuerzas en los elementos: Carga concentrada Elemento 1. Carga concentrada -135.000 Distancia desde el principio 450.000
MEDIO ANCHO DE BANDA = 9
DESPLAZAMIENTOS, REACCIONES Y FUERZAS EN LOS ELEMENTOS Desplazamientos nodales: Nodo 1 2 3 4 Desp. x .000000 1.370369 .000000 1.358965 Desp. y .000000 -1.051209 .000000 -.013346 Rotacin z .000000 -.003362 .000000 .000460
Reacciones: Nodo 1 3 Fuerza x 1666.058 -1774.062 Fuerza y 3062.124 4158.870 Momento z 137023.600 515875.300
Fuerzas y momentos en los extremos de los elementos: Elemento 1 1 2 2 3 3 Nodo 1 2 3 4 2 4 F. Axial (x) -2999.3410 -2999.3410 -3558.8700 -3558.8700 -1774.0470 -1774.0470 F. Cort. (y) 504.4256 -305.5743 1774.0620 1774.0620 1856.1310 -2958.8690 Momento(z) -137023.6000 -52329.3500 -515875.3000 548561.7000 -52329.3800 -548561.8000
*****FIN DEL PROGRAMA*****
49
V daN
DIAGRAMAS DE SOLICITACIONES
M daNm
N daN
99 29 25 49
52 3
30
13
135 daN 0.90 daN/cm
Ob ser v.
99
45
36
+
29 99
=
34 4 9
I
1
50
70
M0 =
(504 + 99) 4.50 1370 = 13 2
45 0
Situacin a
13
Situacin b
50
II Observ.
V daN
1774
1774
5159
M daNm
5486
Situacin a Situacin b
600 3559
C T 600 3559 C
+ =
N daN
4159
2959 C
51
5.35 daN/cm
2 4
Observ.
1856
V daN
x0 = 3,47m x0 = 3.47 m
2959
5486
M daNm
523
2697 1774 C
M0 =
1856 3 .47 523 = 2697 2
N daN
1774
52
REACCIONES
135 cos 53
135 sen53
= 53
535 daN/m
2 4
135 daN 200 daN/m 150 daN/m
1666 daN
1774 daN
1370 daNm 3062 daN
5159 daNm 5159 daN
VERIFICACION DE LOS RESULTADOS APLICACIN DE LAS ECUACIONES DEL EQUILIBRIO PARA ESTRUCTURAS ESQUEMATIZABLES EN EL PLANO. 1. FVERT.=0 -535x9-150x7,5-200x6-135.cos53+3062,124+4159,87=0,006=0 2. FHORIZ=0 135.sen53+1666,058-1774,062=0,004=0 3. M1=0 (Toma de momento con respecto al nodo 1) -150x7,50x2,25-535x9,00x9,00-200x6x13,50-135x4,50+4158,87x13,50+5158,753+1370,236 =0,016=0
53
DEFORMADA
x2
2
y2
4
2
x4
y4
p.i.
p.i.
4
p.i.
p.i. = punto inflexin
You might also like
- Estudio de Tráfico TorataDocument9 pagesEstudio de Tráfico TorataCordova BerlynNo ratings yet
- MODELACIONINELASTICADINAMICASIMPLIFICADADocument10 pagesMODELACIONINELASTICADINAMICASIMPLIFICADAjoseNo ratings yet
- Formato Conteo VehicularDocument34 pagesFormato Conteo VehicularCordova BerlynNo ratings yet
- Anexo - para Memoria de Calculo Conteo Vehicular Sabaya 2021Document23 pagesAnexo - para Memoria de Calculo Conteo Vehicular Sabaya 2021Cordova BerlynNo ratings yet
- Hoja de MetradosDocument6 pagesHoja de MetradosmaryNo ratings yet
- Capturar Locking CodeDocument3 pagesCapturar Locking CodeClaudiaNo ratings yet
- Analisis de Precio UnitarioDocument117 pagesAnalisis de Precio UnitarioCordova BerlynNo ratings yet
- Costos y Presupuestos-Manual Sesión 2Document43 pagesCostos y Presupuestos-Manual Sesión 2LUISHUNGARO74No ratings yet
- Memoria - Estudio de Tráfico Torata Sabaya 2021Document10 pagesMemoria - Estudio de Tráfico Torata Sabaya 2021Cordova BerlynNo ratings yet
- Plantilla Excel CcipDocument25 pagesPlantilla Excel CcipCordova BerlynNo ratings yet
- Plano de IntervencionDocument1 pagePlano de IntervencionCordova BerlynNo ratings yet
- Guía Del Estudiante S10 Costos y Presupuesto Parte 1Document29 pagesGuía Del Estudiante S10 Costos y Presupuesto Parte 1JorgeNo ratings yet
- Curso albañilería sismorresistente ETABS NTE E.030Document58 pagesCurso albañilería sismorresistente ETABS NTE E.030Luis ChirccaNo ratings yet
- Ejemplo Muy Bueno-MUROS A FLEXOCOMPRESIONDocument202 pagesEjemplo Muy Bueno-MUROS A FLEXOCOMPRESIONeduardoNo ratings yet
- Tesis Edificio de 20 Pisos PDFDocument194 pagesTesis Edificio de 20 Pisos PDFAlvaro Pazmiño Roman100% (1)
- Tuberia SCH 40Document16 pagesTuberia SCH 40Albert RuizNo ratings yet
- Definición de Un Análisis de Precios UnitariosDocument7 pagesDefinición de Un Análisis de Precios UnitariosAlex Soncco BendezuNo ratings yet
- Comentarios A La Norma Técnica de Edificación E.070 (Perú)Document168 pagesComentarios A La Norma Técnica de Edificación E.070 (Perú)Fernando Enrique Dueñas67% (3)
- Plantilla Excel CcipDocument25 pagesPlantilla Excel CcipCordova BerlynNo ratings yet
- Manual Maestro ConstrucorDocument122 pagesManual Maestro ConstrucorAlberto Garro PeraltaNo ratings yet
- 3 - Analisis Estructural.Document18 pages3 - Analisis Estructural.Cordova BerlynNo ratings yet
- 1 - Tipos de EstructurasDocument7 pages1 - Tipos de EstructurasIan Alberto Meza100% (1)
- Cronograma de Videoconferencias Semana 1 PDFDocument1 pageCronograma de Videoconferencias Semana 1 PDFCordova BerlynNo ratings yet
- Estudio de TraficoDocument3 pagesEstudio de TraficoCordova BerlynNo ratings yet
- Informe de Estudio de TraficoDocument12 pagesInforme de Estudio de TraficoCordova BerlynNo ratings yet
- Modelo Cuaderno de ObraDocument2 pagesModelo Cuaderno de ObraCordova Berlyn100% (2)
- CotIZACION - 0056 - 19 Alquiler de Baños Quimicos CONSORCIO LIMADocument2 pagesCotIZACION - 0056 - 19 Alquiler de Baños Quimicos CONSORCIO LIMACordova BerlynNo ratings yet
- Formato Conteo de VehiculosDocument7 pagesFormato Conteo de VehiculosCordova BerlynNo ratings yet
- Costo Mano de Obra 2019 Peru Corregido EverlinDocument8 pagesCosto Mano de Obra 2019 Peru Corregido EverlinCordova BerlynNo ratings yet
- Costo Mano de Obra 2019 Peru Corregido EverlinDocument8 pagesCosto Mano de Obra 2019 Peru Corregido EverlinCordova BerlynNo ratings yet
- Laboratorio de Física II. Esfuerzos.Document18 pagesLaboratorio de Física II. Esfuerzos.Michael Huicho Auccatoma100% (1)
- Diseño de caja reductora de velocidad: Análisis de sus componentesDocument34 pagesDiseño de caja reductora de velocidad: Análisis de sus componentesMateo CastagnaNo ratings yet
- Construccion de CamionesDocument23 pagesConstruccion de CamionesHeberChanCanulNo ratings yet
- Ejes de Sección VariableDocument8 pagesEjes de Sección VariableWenceslao Avalos ArgoteNo ratings yet
- Cálculo de la anchura mínima requerida de una viga de maderaDocument7 pagesCálculo de la anchura mínima requerida de una viga de maderacarlo100% (1)
- Silabo Estática 2019Document8 pagesSilabo Estática 2019Ginner Santiago50% (2)
- Puente Fermín MálagaDocument21 pagesPuente Fermín MálagaNorelNeiraCauchaNo ratings yet
- Memoria de Calculo TijeralDocument22 pagesMemoria de Calculo TijeralJERSON CLENERNo ratings yet
- Terminología de edificaciones venezolanasDocument129 pagesTerminología de edificaciones venezolanasAbdy Maria Parra GonzalezNo ratings yet
- Lab EstáticaDocument2 pagesLab EstáticaGHESY AMASIFUEN SANGAMANo ratings yet
- Cangilones Trabajo GrupalDocument32 pagesCangilones Trabajo GrupalandreNo ratings yet
- Diseño de ColumnasDocument19 pagesDiseño de ColumnasJerson Vargas ValeraNo ratings yet
- T1 EstaticaDocument2 pagesT1 Estaticaemily milena acosta fasabiNo ratings yet
- Calculo Mecanico de Postes - Correccion de Distancias de Fuga PDFDocument11 pagesCalculo Mecanico de Postes - Correccion de Distancias de Fuga PDFAnonymous cOYX3GRdRBNo ratings yet
- Modelo 2D de pórtico 3DDocument17 pagesModelo 2D de pórtico 3DYelsin CamposNo ratings yet
- Cálculo de Fuerzas Internas y Diagramas (Grupo N°04)Document19 pagesCálculo de Fuerzas Internas y Diagramas (Grupo N°04)Luis Alberto Leon RojasNo ratings yet
- INFORME MOMENTO FLECTOR Y FUERZA CORTANTE (Reparado)Document20 pagesINFORME MOMENTO FLECTOR Y FUERZA CORTANTE (Reparado)CLC VERSION LIMITADA100% (7)
- Actividad Virtual N°1 - Revisión de IntentosDocument10 pagesActividad Virtual N°1 - Revisión de IntentosDante Daniel Quispe cuentasNo ratings yet
- Diagramas de Interaccion en ColumnasDocument3 pagesDiagramas de Interaccion en ColumnasJeffersson Quiñones RomaniNo ratings yet
- Diagramas de Fuerza Cortante y Momento Flecto1 y Calculo de VigaDocument5 pagesDiagramas de Fuerza Cortante y Momento Flecto1 y Calculo de VigaKatelin TurmeroNo ratings yet
- Prontuario - en - Excel - HA - Manual de Uso (Castellano) PDFDocument71 pagesProntuario - en - Excel - HA - Manual de Uso (Castellano) PDFClaudia GaravitoNo ratings yet
- Decreto 1400 de 1984Document328 pagesDecreto 1400 de 1984b9311727No ratings yet
- ESTRUCTURAS I UNIVERSIDAD NACIONAL FEDERICO VILLARREALDocument5 pagesESTRUCTURAS I UNIVERSIDAD NACIONAL FEDERICO VILLARREALGott Segne SieNo ratings yet
- Losa MacizaDocument106 pagesLosa Macizakinkimono1No ratings yet
- Texto 2da Version Superestructura de Puentes de Ho Ao PDFDocument246 pagesTexto 2da Version Superestructura de Puentes de Ho Ao PDFMiguel Rivera BejaranoNo ratings yet
- Practica 5 (Prueba de Flexion en Barras Metalicas)Document14 pagesPractica 5 (Prueba de Flexion en Barras Metalicas)BlasNo ratings yet
- Actividad 10 Analisis EstructuralDocument18 pagesActividad 10 Analisis EstructuralShelly StefhanyNo ratings yet
- Análisis de mecanismo de falla de estructurasDocument12 pagesAnálisis de mecanismo de falla de estructurasDeisy M SNo ratings yet
- Esfuerzo Normal y Cortante en Vigas-1Document11 pagesEsfuerzo Normal y Cortante en Vigas-1Annthoon GaLaNo ratings yet