Professional Documents
Culture Documents
These2007 Gauthier
Uploaded by
Sofiane HalimiCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
These2007 Gauthier
Uploaded by
Sofiane HalimiCopyright:
Available Formats
COMMANDE MULTIVARIABLE
DE LA PRESSION DINJECTION
DANS UN MOTEUR DIESEL
COMMON RAIL
Christophe GAUTHIER
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
INSTITUT NATIONAL POLYTECHNIQUE DE GRENOBLE
N attribu par la bibliothque
|__|__|__|__|__|__|__|__|__|__|
T H E S E
pour obtenir le grade de
DOCTEUR DE LINP Grenoble
Spcialit : Automatique et Productique
prpare au Laboratoire dAutomatique de Grenoble
dans le cadre de lEcole Doctorale
Electronique, Electrotechnique, Automatique et Traitement du Signal
prsente et soutenue publiquement
par
Christophe GAUTHIER
le 22 mai 2007
COMMANDE MULTIVARIABLE DE LA PRESSION DINJECTION
DANS UN MOTEUR DIESEL COMMON RAIL
Directeur de thse : M. SENAME Olivier
Co-encadrants : M. DUGARD Luc
M. MEISSONNIER Guillaume
JURY
M. ROUCHON Pierre, Professeur Ecole des Mines Paris Prsident
M. GUERRA Thierry-Marie, Professeur universit de Valenciennes Rapporteur
M. FERRERES Gilles, Chercheur ONERA Toulouse Rapporteur
M. SENAME Olivier, Professeur ENSIEG/INPG Grenoble Co-Directeur de thse
M. DUGARD Luc, Directeur de recherche CNRS Grenoble Co-Directeur de thse
M. MEISSONNIER Guillaume, Delphi Diesel Systems Blois Examinateur
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
i
Remerciements
Le travail prsent dans ce mmoire est le rsultat dinnombrables changes techniques,
scientiques et idologiques.
Je remercie Guillaume Meissonnier, mon responsable industriel, pour mavoir donn
les moyens ncessaires pour russir bien ce travail. Je le remercie galement pour avoir
su me faire conance sur mes choix stratgiques : lieu de travail, mise en place dune
nouvelle structure de contrle, etc.
Je remercie Olivier Sename et Luc Dugard, mes directeurs de thse, pour mavoir
accompagn tout au long de mes travaux et de mavoir laiss matre sur le choix des
direntes solutions que jai prises.
Je remercie Pierre Rouchon pour avoir accept de prsider le jury, Thierry-Marie
Guerra et Gilles Ferreres pour avoir accept de rapporter ce travail.
Durant ces trois annes de thse de nombreuses personnes mont aid, sans qui je
naurais jamais pu arriver au rsultat obtenu.
Je remercie Marcos Pagoto qui a t le premier mavoir guid pendant plusieurs
mois sur la comprhension du fonctionnement du systme, notamment sur la pompe haute
pression. Il ma appris les principes gnraux dans le domaine hydraulique qui mont t
ncessaires pour tudier le systme Common Rail. Je remercie Rodolphe Dratch et Eric
Charleux pour leur aide sur ltude des injecteurs.
Ltude thorique du systme sest toujours faite en parallle avec des essais sur le
systme rel. Ainsi je remercie Alain Mercier et Miguel Dominguez pour mavoir fait de
la place, jour et nuit, sur leur banc dessai. Cette mixit thorie/pratique ma permis
de comprendre physiquement (sur le plan thorique) les constats que jai pu faire sur le
systme.
Je remercie Zahi Sabeh, Pierre Dupraz, Alexandre Amiez et Anthony Michou pour
leur aide et leur soutien durant ces trois ans.
Je remercie galement Marc Houdebine, mon collgue du laboratoire de Grenoble,
pour ces longues discussions que nous avons pu avoir qui mont fait prendre du recul sur
mes travaux.
Je ne peux oublier de remercier grandement Nicolas Duvernois qui ma beaucoup
soutenu durant ces trois annes.
Je remercie Arnaud Girard pour son aide sur le prototypage rapide qui a contribu
lintgration du code de mes stratgies de commande dans le calculateur. Sans lui les
essais vhicules nauraient jamais pu tre raliss avant la n de ma thse.
Je remercie Jonathan Kolou qui ma paul en dbut de thse sur la problmatique
du contrle de la pression, me permettant de bien dmarrer mes travaux. Je le remercie
galement pour son aide en n de thse pour la ralisation dessais qui ont valid le modle.
Enn je remercie Patrice, Patrick Lailler, Stphane, Bruno, Ludovic, David, Guy,
Thierry, Jean-Michel, Benoit et Patrick Daniel pour lambiance agrable et la convivialit.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
ii
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
iii
Bernard et Dominique, mes parents,
Christelle, mon pouse,
Mayane, ma lle.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
iv
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
v
Pratique n.f. Application, mise en action des rgles et des principes dun art ou dune
science (le Larousse de poche).
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
vi
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
Table des matires
Partie I Introduction 7
1 Introduction gnrale 9
1.1 Contexte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Plan du mmoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.1 Partie 1 : Introduction gnrale . . . . . . . . . . . . . . . . . . 10
1.3.2 Partie 2 : Modlisation . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.3 Partie 3 : Commandes . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.4 Partie 4 : Mise en oeuvre . . . . . . . . . . . . . . . . . . . . . 11
1.3.5 Partie 5 : Conclusion . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Publications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Le moteur Diesel 13
2.1 Historique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Principe de fonctionnement . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Le turbocompresseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Systme dinjection directe rampe commune . . . . . . . . . . . . . . 15
2.4.1 Fonctionnement du systme . . . . . . . . . . . . . . . . . . . . 18
2.4.2 Actionneur de remplissage . . . . . . . . . . . . . . . . . . . . . 19
2.4.3 Pompe Haute Pression . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.4 Rail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.5 Actionneur de dcharge . . . . . . . . . . . . . . . . . . . . . . 20
2.4.6 Injecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4.7 Interconnection des lments . . . . . . . . . . . . . . . . . . . 24
1
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
2 Table des matires
3 Objectifs et contributions 25
3.1 Problmatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Mthodologie de calibration actuelle . . . . . . . . . . . . . . . . . . . 26
3.3 Propositions damlioration . . . . . . . . . . . . . . . . . . . . . . . . 27
Partie II Modlisation 31
4 Lactionneur de remplissage 33
4.1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2 Le circuit lectrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3 Le circuit magntique . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.4 Le systme masse-ressort . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.5 Le systme hydraulique . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.5.1 Calcul de la section de passage . . . . . . . . . . . . . . . . . . 37
4.5.2 Calcul du coecient de dbit de Bernouilli . . . . . . . . . . . . 38
4.6 Modle non-linaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.7 Modle linaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.8 Test et validation du modle de lIMV . . . . . . . . . . . . . . . . . . 43
4.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5 La pompe haute pression (Condentiel - Delphi) 47
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2 La chambre de pompage . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.2.1 Fonctionnement et cycle du plongeur . . . . . . . . . . . . . . . 48
5.2.2 Remplissage de la chambre de pompage : aspiration . . . . . . . 50
5.2.3 Saturation du dbit de la pompe . . . . . . . . . . . . . . . . . 52
5.2.4 Compression . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.2.5 Dbit refoul par le plongeur . . . . . . . . . . . . . . . . . . . 55
5.2.6 Modle de la pompe . . . . . . . . . . . . . . . . . . . . . . . . 56
5.2.7 Calcul du dbit maximal instantan de la chambre de pompage 58
5.2.8 Calcul du dphasage
1
en fonction du taux de remplissage . . . 59
5.3 Pompe HP trois plongeurs . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.3.1 Forme des dbits de la pompe . . . . . . . . . . . . . . . . . . . 60
5.3.2 Un pompage par priode . . . . . . . . . . . . . . . . . . . . . . 65
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
3
5.3.3 Dynamique de la pompe . . . . . . . . . . . . . . . . . . . . . . 66
5.3.4 Identication de la fonction de transfert de la pompe HP . . . . 69
5.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
6 Le rail 73
6.1 Prsentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.2 Fonctionnement du rail . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.3 Modle du rail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.4 Discrtisation du modle . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7 Linjecteur 77
7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7.2 Modle non linaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7.3 Analyse dune simulation . . . . . . . . . . . . . . . . . . . . . . . . . . 80
7.4 Modle linaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
8 Lactionneur de dcharge 83
8.1 Prsentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
8.2 tude des forces exerces sur lHPV . . . . . . . . . . . . . . . . . . . . 85
8.2.1 Force hydraulique . . . . . . . . . . . . . . . . . . . . . . . . . . 85
8.2.2 Force lectromcanique . . . . . . . . . . . . . . . . . . . . . . . 86
8.2.3 Force mcanique . . . . . . . . . . . . . . . . . . . . . . . . . . 86
8.2.4 Force des eorts de jet . . . . . . . . . . . . . . . . . . . . . . . 87
8.2.5 Viscosit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
8.2.6 Modle non-linaire . . . . . . . . . . . . . . . . . . . . . . . . . 88
8.3 Analyse des rsultats thoriques . . . . . . . . . . . . . . . . . . . . . . 90
8.3.1 Modle linaire, formulation gnrale . . . . . . . . . . . . . . . 90
8.3.2 Linarisation du modle de la pression du rail . . . . . . . . . . 90
8.3.3 Linarisation de lacclration de la bille . . . . . . . . . . . . . 92
8.3.4 Modle linaire du systme rail-HPV . . . . . . . . . . . . . . . 93
8.3.5 Etude du systme Rail-HPV (Condentiel - Delphi) . . . . . . . 94
8.3.6 Principe de fermeture de lHPV (Condentiel - Delphi) . . . . . 97
9 Modlisation LFT 101
9.1 Modles linaires paramtres variables (LPV) . . . . . . . . . . . . . 101
9.2 Transformation linaire fractionnelle (LFT) . . . . . . . . . . . . . . . 102
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
4 Table des matires
9.3 Reprsentation LFT dun systme linaire . . . . . . . . . . . . . . . . 103
9.4 Extraction dun coecient variable sous forme LFT . . . . . . . . . . . 104
9.5 Ecriture du modle LFT du systme Common Rail . . . . . . . . . . . 106
Partie III Commandes 111
10 Stratgies de commande 113
10.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
10.2 Stratgie de commande monovariable . . . . . . . . . . . . . . . . . . . 113
10.3 Ouverture de lHPV : passage en mode multivariable . . . . . . . . . . 114
10.4 Stratgie de commande multivariable (Condentiel - Delphi) . . . . . . 115
10.4.1 Fermeture de lHPV : passage en mode monovariable . . . . . . 117
10.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
11 Quelques lments sur la commande H
119
11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
11.1.1 Principe de la commande H
. . . . . . . . . . . . . . . . . . . 119
11.2 Synthse H
LTI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
11.2.1 Solution du contrleur temps continu . . . . . . . . . . . . . . 122
11.2.2 Solution du contrleur temps discret . . . . . . . . . . . . . . 122
11.3 Synthse H
LFT temps discret . . . . . . . . . . . . . . . . . . . . 123
11.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
11.3.2 Ecriture du problme . . . . . . . . . . . . . . . . . . . . . . . . 124
11.3.3 Solution du problme . . . . . . . . . . . . . . . . . . . . . . . . 125
11.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
12 Synthse de la loi de commande monovariable 127
12.1 Contrleur de la pression dinjection . . . . . . . . . . . . . . . . . . . 127
12.1.1 Normalisation du modle pour la synthse . . . . . . . . . . . . 127
12.1.2 Systme en boucle ouverte . . . . . . . . . . . . . . . . . . . . . 129
12.1.3 Architecture du contrleur . . . . . . . . . . . . . . . . . . . . . 129
12.1.4 Cahier des charges . . . . . . . . . . . . . . . . . . . . . . . . . 132
12.1.5 Synthse LFT H
du contrleur de pression . . . . . . . . . . . 132
12.2 Rsultat du contrleur en boucle ouverte . . . . . . . . . . . . . . . . . 135
12.3 Robustesse vis--vis de la position de lIMV . . . . . . . . . . . . . . . 136
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
5
12.3.1 Analyse par le thorme du petit gain . . . . . . . . . . . . . . 137
12.3.2 Analyse par la marge de gain . . . . . . . . . . . . . . . . . . . 138
12.4 Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
12.4.1 Essai 1 : prol en "montagnes russes" . . . . . . . . . . . . . . . 142
12.4.2 Essai 2 : prol en acclration . . . . . . . . . . . . . . . . . . . 143
12.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
Partie IV Mise en oeuvre 145
13 Calibration de la stratgie actuelle partir du modle thorique 147
13.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
13.2 Comparaisons et validations . . . . . . . . . . . . . . . . . . . . . . . . 149
13.2.1 cas 1 : 750 tr/min, 5 mg/cp, 230 bar . . . . . . . . . . . . . . . 149
13.2.2 cas 2 : 750 tr/min, 20 mg/cp, 275 bar . . . . . . . . . . . . . . 152
13.2.3 cas 3 : 750 tr/min, 70 mg/cp, 680 bar . . . . . . . . . . . . . . 152
13.2.4 cas 4 : 1000 tr/min, 5 mg/cp, 279 bar . . . . . . . . . . . . . . 155
13.2.5 cas 5 : 1000 tr/min, 20 mg/cp, 365 bar . . . . . . . . . . . . . . 155
13.2.6 cas 6 : 1000 tr/min, 70 mg/cp, 930 bar . . . . . . . . . . . . . . 155
13.2.7 cas 7 : 2000 tr/min, 5 mg/cp, 560 bar . . . . . . . . . . . . . . 158
13.2.8 cas 8 : 2000 tr/min, 20 mg/cp, 600 bar . . . . . . . . . . . . . . 158
13.2.9 cas 9 : 2000 tr/min, 70 mg/cp, 1400 bar . . . . . . . . . . . . . 158
13.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
14 Mise en oeuvre de la nouvelle stratgie de commande 163
14.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
14.2 Intgration de la loi de commande monovariable . . . . . . . . . . . . . 164
14.2.1 Le contrleur H
LFT . . . . . . . . . . . . . . . . . . . . . . . 164
14.2.2 Intgration du contrleur dans lECU . . . . . . . . . . . . . . . 166
14.2.3 Quantication des signaux . . . . . . . . . . . . . . . . . . . . . 166
14.3 Tests et validations sur vhicule . . . . . . . . . . . . . . . . . . . . . . 167
14.3.1 Contrle par lIMV seule . . . . . . . . . . . . . . . . . . . . . . 167
14.3.2 Contrle par lIMV et lHPV . . . . . . . . . . . . . . . . . . . 176
14.3.3 Passage IMV seule vers IMV et HPV puis fermeture de lHPV . 181
14.3.4 Passage du mode de fermeture de lHPV vers lIMV seule . . . 184
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
6 Table des matires
Partie V Conclusion Gnrale 195
15 Bilan des rsultats obtenus 197
16 Perspectives 199
Bibliographie 201
Annexes 203
A Systme LFT (P, K) en boucle ferme 203
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
Premire partie
Introduction
7
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
1
Introduction gnrale
1.1 Contexte
Les normes environnementales sont aujourdhui une proccupation majeure des construc-
teurs automobiles. Des rglementations sur les missions xent des seuils maximaux de
rejets dun ensemble de polluants. Pour atteindre ces seuils, un travail important est ra-
lis sur le contrle de la combustion, o il sagit dapporter au cylindre le bon mlange
air, gaz brls et carburant. Deux systmes relis aux cylindres permettent le contrle de
la combustion, il sagit du turbocompresseur qui rgule lapport dair au cylindre [20, 6],
et du systme dinjection Common Rail (CR).
Nous nous intressons dans cette thse au systme dinjection uniquement. Une bonne
injection se dnit par la bonne quantit de carburant introduite dans le cylindre une
pression et un instant donns. Les demandes du dbit et de la pression sont dnies
en fonction du rgime moteur et du couple demand. Une erreur de pression de quelques
bar peut avoir des rpercussions importantes sur le couple moteur et les missions de
polluants car la combustion ne sera pas optimale.
1.2 Motivations
Une demande particulire de Delphi tait de pouvoir, partir des caractristiques du
sytme dinjection CR, laborer une calibration du contrle de la pression en minimisant
le nombre dessais raliser sur le systme. La connaissance du modle du systme devait
tre donc physique et non exprimentale. Il tait ncessaire de dvelopper un modle
la fois prcis et exploitable en vue de son utilisation pour les algorithmes de synthse de
contrleur.
Les contrleurs actuels sont des PID et donnent des rponses en boucle ferme stables
et relativement robustes. Nanmoins, leur utilisation ne permet pas de garantir le niveau
de performance requis par le cahier des charges. En particulier, et titre dexemple, le
suivi dune rampe avec une erreur de trainage nulle nest pas possible. Cette erreur, selon
la pente de la rampe, peut atteindre des valeurs suprieures 200 bar.
Dautre part, le passage dun contrleur un autre selon le changement de point de
fonctionnement consiste une interpolation de gains (les coecients du PID). La stabilit
9
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
10 Chapitre 1. Introduction gnrale
du systme entre deux points de fonctionnement doit tre alors vrie a posteriori.
Les techniques de synthse de contrleur telles que lapproche H
linaire paramtres
variables (LPV) (gain scheduling) ont fait la preuve de leur ecacit, tant sur le plan de
la performance que de la robustesse. La loi dinterpolation du contrleur est intrinsque
la solution et la stabilit du systme est garantie, a priori, pour tous les points de
fonctionnement. Cette technique permet galement de prendre en compte le cahier des
charges et de donner une solution au problme lorsquelle existe.
Les travaux de cette thse sinscrivent dans le cadre dune collaboration entre le La-
boratoire dAutomatique de Grenoble (LAG) et la socit Delphi
1
. Cette collaboration a
pour but de participer pleinement au transfert de comptences, par lapport dinforma-
tions techniques sur les problmes que rencontre le monde industriel dune part, et pour
proposer de nouveaux rsultats scientiques sur des problmes industriels dautre part.
Lambition de ces travaux taient daller au-del dune tude de faisabilit. Lobjectif
tait de mettre en pratique des techniques de contrle avances, pouvant sappliquer au
moteur injection directe Common Rail et dintgrer les lois de commande ainsi dvelop-
pes dans le calculateur
2
, aprs avoir rsolu les problmes de mise en oeuvre, pour raliser
des essais sur vhicule. Cette contrainte a impos tout au long de la thse de faire des
choix face direntes solutions oertes (p.e. type de contrle), de nen choisir quune
seule, sans pouvoir toutes les tester, an daboutir, aprs ces trois annes de recherche et
de dveloppement, une solution oprationnelle au mme titre que les lois de commande
actuelles de sorte que les comparaisons soient possibles.
1.3 Plan du mmoire
Nous exposons dans ce mmoire les travaux qui ont amen la mise en oeuvre dune
solution sur le vhicule et qui ont abouti des essais. Les autres solutions, par exemple
sur de nouveaux schmas de synthse, nayant pas t valides sur vhicule et restant
dans le domaine thorique sont prsentes brivement dans le chapitre perspectives de la
dernire partie.
1.3.1 Partie 1 : Introduction gnrale
Cette partie prsente le moteur Diesel et le systme dinjection Common Rail. Il sagit
dun rappel pour les lecteurs avertis et dune prsentation sommaire pour ceux qui d-
couvrent ce systme.
1.3.2 Partie 2 : Modlisation
Cette partie traite de la modlisation physique du systme dinjection Common Rail.
Chaque organe agissant sur lvolution de la pression dinjection est dcrit de manire
prcise, pour obtenir un modle de comportement non-linaire dans un premier temps
puis linaris en vue de la synthse dune loi de commande.
1
Centre Technique de Blois (Loir-et-Cher)
2
nous utiliserons dans la suite du manuscrit le terme ECU (Electronic Control Unit)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
1.4. Publications 11
1.3.3 Partie 3 : Commandes
Cette partie est dcompose en trois chapitres. Tout dabord, les stratgies de com-
mande pour les dirents modes de contrle sont prsentes. Il sagit de prsenter de quelle
manire sont agences les stratgies. Celles-ci sont primordiales car elles permettent de
choisir, en fonction de ltat du systme, le type de contrle appliquer. Les lois de
commande ne sont pas prcises.
Le deuxime chapitre traite de ltude thorique de la synthse H
. Pour llaboration
des lois de commande nous utilisons trois types de synthse : standard temps continu,
standard temps discret et LFT temps discret. Nous prsentons les solutions des trois
techniques de synthse.
Le dernier chapitre concerne la mise en oeuvre de la synthse H
LFT et lanalyse sur
le contrle de la pression rail par lactionneur de remplissage. Il sagit de la commande la
plus complique. Les autres commandes utilisent des mthodes largement connues, nous
ne prsentons donc pas la synthse des contrleurs mais juste les rsultats pratiques dans
la partie suivante.
1.3.4 Partie 4 : Mise en oeuvre
La quatrime partie traite de lapplication sur vhicule de ltude thorique dveloppe
dans les deux premires parties. Nous prsentons tout dabord des rsultats de calibration
de PID synthtiss partir du modle thorique. Des comparatifs sont faits entre les
modles exprimentaux
3
et thoriques. Ces travaux nont pas modi la structure des lois
de commande.
Puis nous prsentons les rsultats des nouvelles stratgies et lois de commande dve-
loppes. Dirents essais sont prsents, certains tant compars avec les rsultats quiva-
lents de simulation et dautres avec les rsultats du contrle de la pression rail dorigine.
Une explication sur la mise en oeuvre est donne. Le choix de la forme du contrleur est
discut, ainsi que la dtermination du typage des variables en vue de lintgration dans
lECU qui travaille sur des nombres en rgule xe.
1.3.5 Partie 5 : Conclusion
Dans la dernire partie, nous faisons le bilan de notre travail et nous apportons des
conclusions sur notre approche. Des perspectives sont galement exposes en vue de pour-
suivre et damliorer le travail dj ralis.
1.4 Publications
Ce travail a donn lieu un certain nombre de publications :
16th IFAC WORLD CONGRESS, CZ, Prague, july 4-8, 2005 : Modelling of a Diesel
Engine Common Rail injection system, Gauthier C., Sename O., Dugard L. and
Meissonnier G.,
3
modles obtenus par identications sur vhicule
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12 Chapitre 1. Introduction gnrale
Les Rencontres Scientiques de lIFP : "New Trends in Engine Control, Simulation
and Modelling", 2-4 Octobre 2006 : An LFT approach to Hinnity Control Design
for Diesel Engine Common Rail Injection System, Gauthier C., Sename O., Dugard
L. and Meissonnier G.,
(accept) Oil & Gas Science and Technology, revue de lifp : An LFT approach to
Hinnity Control Design for Diesel Engine Common Rail Injection System, Gauthier
C., Sename O., Dugard L. and Meissonnier G.,
European Control Conference (ECC), Greece, Kos, July 2-5 2007 : An Hinnity
Linear Parameter-Varying (LPV) Controller for a Diesel Engine Common Rail In-
jection System, Gauthier C., Sename O., Dugard L. and Meissonnier G.,
(soumis) IFAC Advances in Automotive Control, USA, August 2007 : Some expe-
rimental results of a robust Hinnity Linear Parameter-Varying (LPV) controller
applies to a Diesel Engine Common Rail Injection System, Gauthier C., Sename O.,
Dugard L. and Meissonnier G.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
2
Le moteur Diesel
Sommaire
2.1 Historique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Principe de fonctionnement . . . . . . . . . . . . . . . . . . 15
2.3 Le turbocompresseur . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Systme dinjection directe rampe commune . . . . . . . 15
2.4.1 Fonctionnement du systme . . . . . . . . . . . . . . . . . . 18
2.4.2 Actionneur de remplissage . . . . . . . . . . . . . . . . . . 19
2.4.3 Pompe Haute Pression . . . . . . . . . . . . . . . . . . . . 19
2.4.4 Rail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.5 Actionneur de dcharge . . . . . . . . . . . . . . . . . . . . 20
2.4.6 Injecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4.7 Interconnection des lments . . . . . . . . . . . . . . . . . 24
2.1 Historique
Cest en 1893 que le premier moteur allumage par compression a t mis au point,
plus connu sous le nom de son inventeur, Rudolf Diesel (1858-1913). Il imagina un moteur
dans lequel lair serait comprim un tel niveau quil y aurait une grande lvation de
temprature. Lorsque le carburant serait ensuite inject dans la chambre de combustion
avec lair, celui-ci senammerait immdiatement par la haute temprature de lair, pro-
voquant une explosion, et repoussant ainsi le piston. Le premier fonctionnement de son
moteur donna un rendement de 26%, plus du double decacit par rapport aux moteurs
vapeur qui avaient un rendement de 12%. En fvrier 1897, il mit au point le premier
moteur Diesel adapt pour les utilisations courantes. Les moteurs Diesel ont longtemps
fonctionn lhuile vgtale.
En 1936 Mercedes Benz commercialisa la 260D (g.2.2), premier vhicule grand public
quip dun moteur Diesel. Jusqu cette date, les moteurs Diesel taient utiliss pour les
camions, bateaux et dans lindustrie, bnciant du fort rendement.
13
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14 Chapitre 2. Le moteur Diesel
Fig. 2.1 Monocylindre allumage par compression de Rudolf Diesel, 1893
Fig. 2.2 Mercedes 260D, premier vhicule grand public quip dun moteur Diesel, 1936
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
2.2. Principe de fonctionnement 15
2.2 Principe de fonctionnement
Le moteur Diesel est constitu de pistons coulissants dans des cylindres ferms par
une culasse reliant le cylindre aux collecteurs dadmission et dchappement et munie de
soupapes commandes par un arbre cames. Le cycle dun moteur Diesel quatre temps
est ralis sur deux tours moteur. La gure 2.3 dcrit lvolution du piston dans le cylindre
pendant le cycle moteur, tandis que la gure 2.4 montre lvolution la fois du volume
de la chambre de combustion et de sa pression interne.
Le cycle moteur se dcompose comme suit, (le cycle commence avec le piston au point
mort haut
4
et les deux soupapes fermes) :
Admission (1) : la soupape dadmission souvre, le piston descend, augmentant le
volume de la chambre de combustion pendant quelle se remplit dair,
Compression (2) : le piston est au point mort bas
5
, la soupape dadmission se ferme,
le piston monte, diminuant le volume de la chambre de combustion et ainsi augmen-
tant la pression de lair,
Injection, dtente (3) : peu avant le point mort haut, le carburant est inject dans
lair, la combustion se ralise, les gaz chauds repoussent le piston,
Echappement (4) : la soupape dchappement souvre, et les gaz brls sont vacus,
pousss par la remonte du piston.
La commande douverture et de fermeture des soupapes est mcanique et directement lie
la position du vilebrequin.
2.3 Le turbocompresseur
Pendant la phase dadmission, lair entre dans le cylindre par leet daspiration cr
par le dplacement du piston. A faible rgime, la pression de lair en n dadmission est
donc peu prs gale la pression atmosphrique et la masse dair aspire est optimale.
Cependant, plus haut rgime, la masse dair admise peut dcrotre jusqu 60% de
sa valeur optimale : le dbit dair nest pas susant pour remplir le cylindre dans le
temps angulaire imparti. Ce manque dair nuit la combustion et dgrade le rendement
du moteur. Pour y remdier, il faut introduire lair une pression suprieure la pression
atmosphrique. Cest le rle du turbo compresseur.
Le turbocompresseur est constitu de deux turbines dont lune utilise les gaz dchap-
pement pour entraner lautre turbine qui comprime lair vers le collecteur dadmission
des gaz frais. Cest ce quon appelle la suralimentation.
2.4 Systme dinjection directe rampe commune
Nous proposons dans cette partie une description fonctionnelle du systme Common
Rail.
4
cest la position du vilebrequin o le piston est au point le plus haut, le piston annule sa vitesse car
il arrive au bout de sa course
5
cest la position du vilebrequin o le piston est au point le plus bas
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
16 Chapitre 2. Le moteur Diesel
2
eme
temps : COMPRESSION
g
1
er
temps : ADMISSION
g
3
eme
temps : INJECTION
INFLAMMATION
DETENTE
4
eme
temps : ECHAPPEMENT
g
g
soupape
dcahappement
soupape
dadmission
Fig. 2.3 Cycle moteur Diesel quatre temps
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
2.4. Systme dinjection directe rampe commune 17
Pression
Volume
1
2
, ,
,
,
3
3
4
4
Fig. 2.4 Evolution de la pression et du volume de la chambre de combustion
cylindre
collecteur dchappement
turbine
compresseur
air gaz
changeur
collecteur dadmission
Fig. 2.5 Schma de principe du turbo compresseur [13]
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
18 Chapitre 2. Le moteur Diesel
Des informations plus prcises sur le moteur Diesel Common Rail sont donnes, par
exemple, dans le document technique de lAssociation Nationale pour la Formation Au-
tomobile [2].
2.4.1 Fonctionnement du systme
La fonction du systme Common Rail est dinjecter une quantit prcise de carbu-
rant indpendante pour chaque cylindre. La commande lectronique de linjecteur permet
de raliser des injections pouvant se dcomposer en plusieurs petites injections, ce qui
amliore la qualit de la combustion et diminue les missions polluantes.
Le carburant est directement inject dans le cylindre, il ne passe pas par une pr-
chambre de combustion comme cest le cas pour linjection indirecte. Pour que la com-
bustion se ralise correctement le carburant est pulvris trs haute pression crant
de nes particules. La pression dinjection peut varier, selon le point de fonctionnement
du moteur, entre 200 et 1800 bar. Le carburant est stock et pressuris dans une rampe
commune
6
laquelle chaque injecteur est reli par lintermdiaire dun tube. Le systme
dinjection Common Rail est constitu principalement de cinq lments, qui agissent tous
sur lvolution de la pression au sein du rail. Chacun dentre eux est dcrit ci-dessous an
den comprendre le principe de fonctionnement et le rle, pour ensuite tre plus dtaill
dans la partie modlisation.
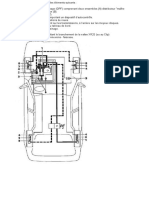
Fig. 2.6 Schma du systme dinjection directe rampe commune
6
le terme anglais est common rail que nous utiliserons dans toute la suite du manuscrit
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
2.4. Systme dinjection directe rampe commune 19
La gure 2.6 montre un schma prsentant le systme dinjection Common Rail. Ce
systme est compos dun actionneur de remplissage qui permet de doser la quantit de
carburant introduire dans le rail. Cest le calculateur qui, en fonction de la pression lue
par le capteur et de la demande de pression, contrle cet actionneur. Pour augmenter la
pression du carburant, le calculateur augmente le dbit de lactionneur de remplissage et
vice versa. La pompe haute pression (HP) permet de transfrer le dbit de lactionneur
de remplissage (quelques bar) vers le rail (plusieurs centaines de bar). Un actionneur
de dcharge permet de diminuer la pression en crant une fuite de dcharge. Ceci est
ncessaire pour les chutes brutales de demande de pression o la simple diminution du
dbit de remplissage ne sut pas.
2.4.2 Actionneur de remplissage
Lactionneur de remplissage (Inlet Metering Valve) IMV permet de doser la quantit
de carburant introduite dans la pompe et donc celle fournie au rail. LIMV est directe-
ment connect la pompe haute pression. Il sagit dun systme lectromcanique qui,
pilot par un signal lectrique, dplace un piston venant recouvrir lorice du passage du
carburant vers la pompe HP. Son rle est double : fournir le carburant ncessaire pour la
reservoir
pompe
bobine
bobine
ressort
avant
ressort
arriere
masse 1
masse 2
Fig. 2.7 Structure mcanique de lIMV
consommation des injecteurs et asservir la pression dans le rail.
2.4.3 Pompe Haute Pression
La pompe HP est llment permettant le transfert du carburant du circuit basse
pression (quelques bar) vers le circuit haute pression (plusieurs centaines de bar).
Le transfert du carburant vers le rail est assur par la chambre de pompage. Celle-ci
est constitue dun plongeur dont son dplacement modie le volume de la chambre et de
deux clapets, lun reli au circuit basse pression (clapet dadmission) et le second au rail
(clapet de refoulement). Le plongeur est command par un excentrique plac sur larbre
de la pompe qui permet son dplacement.
Le fonctionnement de la pompe HP suit le cycle suivant :
Aspiration : lorsque la pression dans la chambre est infrieure celle du circuit basse
pression, le clapet dadmission souvre et la chambre se remplit de carburant jusqu
ce que le clapet se referme,
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
20 Chapitre 2. Le moteur Diesel
Compression : Le volume de la chambre de pompage diminue provoquant llvation
de la pression du carburant quelle contient,
Refoulement : lorsque la pression dans la chambre devient suprieure celle du rail,
le clapet de refoulement souvre, le carburant est alors refoul vers le circuit haute
pression,
Dpressurisation : lorsque le clapet de refoulement se referme, le volume dans la
chambre augmente, faisant diminuer la pression lintrieur jusqu ce que le clapet
dadmission souvre nouveau et le cycle recommence.
La gure 2.8 montre la coupe dune pompe HP constitue de 3 plongeurs.
Fig. 2.8 Coupe dune pompe HP constitue de 3 plongeurs
2.4.4 Rail
Cest le rservoir du systme dinjection o est pressuris le carburant. La pompe HP,
les injecteurs ainsi que lactionneur de dcharge y sont tous relis.
2.4.5 Actionneur de dcharge
Lacitonneur de dcharge (High Pressure Valve) HPV est directement relie au rail
(contrairement aux autres lments qui sont relis par des tubes, augmentant le volume
de la partie haute pression). Sa commande est identique celle de lIMV, cest--dire
une commande en tension. Cet actionneur est utilis pour raliser une chute brutale de
pression, ce qui est ncessaire notamment lorque les injecteurs cessent de dbiter et quil
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
2.4. Systme dinjection directe rampe commune 21
rail
rservoir
masse bille
bobine
bobine
ressort
Fig. 2.9 Structure mcanique de lHPV
ny a donc dans ce cas plus de dbit sortant pour faire chuter la pression (puisque la
pompe HP ne peut que remplir le rail).
2.4.6 Injecteurs
Il existe deux types dinjecteurs, les injecteurs commande lectromcanique et les
injecteurs commande piezzo lectrique. Dans la suite des travaux, nous travaillerons
uniquement avec linjecteur lectromcanique.
La gure 2.10 montre une coupe de linjecteur lectromcanique. Le carburant entre en
haut gauche par le canal dadmission. Le carburant remplit lensemble des volumes de
linjecteur et la pression est galement rpartie. Louverture de linjecteur est provoque
par le dplacement vers le haut de la valve, crant ainsi une fuite appele dbit de contrle.
Ce dbit engendre une chute de la pression au-dessus de laiguille, dsquilibrant les forces
exerces autour de celle-ci. Laiguille se lve de son sige et linjection se produit. Lorsque
linjecteur cesse dtre aliment, la valve redescend, la pression au-dessus de laiguille
augmente et nit par repousser laiguille vers le bas arrtant ainsi linjection.
Louverture de linjecteur nest pas instantane, il y a un certain retard pour que lai-
guille se lve lorsque la valve se soulve, qui est de lordre de la centaine de microsecondes
(cette valeur dpend principalement de la pression rail). Il est ainsi possible de piloter
linjecteur avec une impulsion trs courte, de telle sorte que la leve de la valve cre un
dbit de contrle et se referme avant que laiguille nait eu le temps de se lever. Ce phno-
mne est utilis comme technique pour les systmes qui ne sont pas quips dactionneur
de dcharge, pour crer des fuites (bien entendu en dehors des instants o linjecteur est
pilot pour injecter) et ainsi faire chuter la pression lorsque cest ncessaire. La gure 2.11
illustre les deux utilisations possible de linjecteur : une impulsion lectrique pour injecter
dans le cylindre et une impulsion lectrique trs courte pour uniquement crer un dbit
de contrle an de faire chuter la pression du rail.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
22 Chapitre 2. Le moteur Diesel
Fig. 2.10 Coupe de linjecteur lectromcanique
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
2.4. Systme dinjection directe rampe commune 23
6.8 7 7.2 7.4 7.6 7.8 8
x 10
3 Temps [s]
I
m
p
u
l
s
i
o
n
6.8 7 7.2 7.4 7.6 7.8 8
x 10
3
0
0.5
1
Temps [s]
D
b
i
t
[
l
/
m
i
n
]
6.8 7 7.2 7.4 7.6 7.8 8
x 10
3
0
0.5
1
Temps [s]
D
b
i
t
[
l
/
m
i
n
]
Dbit de contrle
Dbit inject
Dbit de contrle
Dbit inject
Pulse de dcharge
Pulse dinjection
Fig. 2.11 Dbits lors dune injection : pulse de dcharge - pulse dinjection
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
24 Chapitre 2. Le moteur Diesel
2.4.7 Interconnection des lments
prsent que les dirents lments qui agissent sur la pression dinjection ont t
prsents, nous pouvons raliser le synoptique du systme dinjection Common Rail du
point de vue du contrle de la pression (gure 2.12). Nous retrouvons le rail dont la
pression dpend de la somme du dbit entrant (positif) et des dbits sortants (ngatifs)
et les deux organes de contrle, i.e. lIMV et lHPV. Une prsentation plus dtaille de
`
_
RAIL
INJECTEURS
IMV POMPE HP
HPV
P
rail
Q
inj
Q
ppe
Q
hpv
U
imv
U
hpv
Implusions
Q
imv
Fig. 2.12 Synoptique du systme Common Rail du point de vue du contrle de la
pression dinjection
tous les lments du systme dinjection est donne dans la partie modlisation.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
3
Objectifs et contributions
Sommaire
3.1 Problmatique . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Mthodologie de calibration actuelle . . . . . . . . . . . . . 26
3.3 Propositions damlioration . . . . . . . . . . . . . . . . . . 27
3.1 Problmatique
Tous les systmes dinjection Common Rail sont composs des mmes lments, i.e.
IMV, pompe HP, rail, injecteurs et le cas chant dune HPV. Nanmoins, selon le type
de vhicule, les caractristiques des dirents lments doivent tre adaptes aux besoins
du moteur (p.e. le volume du rail).
Ces modications des caractristiques dun systme lautre ne changent pas le prin-
cipe gnral de fonctionnement, en revanche le comportement dynamique du systme est
modi, ce qui ncessite une nouvelle conception du contrle de la pression.
De manire gnrale, la calibration du contrle de la pression dinjection est dcom-
pose en trois tapes incontournables en automatique :
premirement, il faut obtenir un modle mathmatique qui dnit le comportement
dynamique du systme,
deuximement, ce modle est utilis pour raliser la synthse dun contrleur en
fonction des critres dnis par le cahier des charges,
troisimement, le contrleur est mis en oeuvre dans le calculateur pour raliser des
tests sur le vhicule an den raliser la validation.
Du point de vue industriel, les aspects importants concernent la manire darriver au
rsultat (impact sur le cot) et la qualit du rsultat (touchant la satisfaction du client).
Les amliorations possibles se situent donc sur deux points :
ce dont nous avons besoin pour arriver au rsultat escompt, comme les moyens des-
sais (aspect matriel), le temps ncessaire pour eectuer le travail (aspect temporel)
et le nombre de personnes ncessaires pour le raliser (aspect ressources),
le systme, cest--dire les performances et la robustesse du contrle de la pression.
25
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
26 Chapitre 3. Objectifs et contributions
Les sections suivantes prsentent tout dabord la mthodologie actuellement utilise pour
la calibration du contrle de la pression dinjection. Face cela, nous proposons deux
autres mthodes qui apportent chacune au moins une amlioration par rapport la pr-
cdente. La premire mthodologie permet damliorer laspect matriel et temporel en
proposant une approche thorique pour lobtention du modle de comportement du sys-
tme contrler. Lalgorithme de synthse du contrleur et les stratgies de commande
restent inchangs. La seconde mthodologie propose une nouvelle stratgie et une loi de
commande utilisant des techniques de contrle avances.
3.2 Mthodologie de calibration actuelle
Le comportement de la pression dinjection est fortement non-linaire, ce que nous
pourrons constater dans la partie modlisation. La mthode usuelle consiste travailler
autour dun point de fonctionnement, permettant alors dutiliser des techniques de mo-
dlisation et de contrle linaires.
La mthodologie actuelle consiste obtenir pour chaque point de fonctionnement
du systme (plusieurs centaines) un modle linaire du comportement du systme. Le
modle est obtenu par identication soit sur le vhicule soit sur le banc dessai. Il faut
pour cela stabiliser le systme au point de fonctionnenemt en question, exciter le systme
par un ensemble de SBPA
7
. Lacquisition des donnes entre/sortie permet dutiliser des
algorithmes didentication an de dduire un modle sous forme de fonction de transfert.
Il y a autant dessais faire que de points de fonctionnement dnis, ce qui rend ltape
dobtention des modles plutt longue.
Une fois tous les modles obtenus, il faut eectuer la synthse des contrleurs. Il sagit
dun contrleur de type PID
8
dont les gains du mme type sont interpols entre eux pour
passer dun point de fonctionnement un autre. Il faut donc raliser la synthse des gains
du correcteur pour chaque point de fonctionnement en fonction du modle respectif. Les
gains sont obtenus par un algorithme qui rpte donc cette opration autant de fois que
ncessaire.
La dernire tape consiste raliser des essais sur vhicule avec le contrleur calibr
et valider le comportement du systme en boucle ferme. La gure 3.1 rsume la m-
thodologie actuelle, avec les trois tapes, ainsi que le nombre de fois o une tape est
rpte. Plusieurs jours sont ncessaires pour obtenir une calibration du contrle de la
pression dinjection, cest--dire la ralisation des tapes 1 et 2. Cette mthode requiert
davoir disposition un systme, vhicule ou banc dessai, an dappliquer lensemble des
SBPA, pendant une dure relativement longue. Il faut ensuite partir des acquisitions
faites, eectuer toutes les synthses des correcteurs. Le contrle peut seulement ensuite
tre test sur vhicule pour faire les validations.
7
Squence Binaire Pseudo Altoire, signal dont la composition frquentielle sapproche dun bruit
blanc sous certaines conditions
8
Abrviation de Proportionel, Intgral et Drivatif
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
3.3. Propositions damlioration 27
1.1 2.1
acquisition
de donnes
contrleur
calibr
essai
vhicule
et synthse
du contrleur
1.n 2.n
acquisition
de donnes
contrleur
calibr
concatnation
3
test et
validation
identication
du modle
Fig. 3.1 Mthode actuelle pour la calibration du contrle de la pression
3.3 Propositions damlioration
La mthodologie actuelle ncessite davoir disposition un ou plusieurs vhicules ou
bancs dessai. Lecacit de ltape didentication dpend en particulier du nombre de
campagnes de mesure, ce qui est long mettre en oeuvre et coteux en ressources humaines
et nancires.
Pour viter cette dpendance aux moyens dessai lors de lobtention des modles, nous
proposons une approche thorique, base sur la connaissance physique du systme. Ceci
impose une modlisation complte des dirents organes. Le modle ainsi obtenu, non-
linaire, sera valable sur toute la plage de fonctionnement du moteur. Il devra tre linaris
autour dun point de fonctionnement pour pouvoir tre utilis par lalgorithme de syn-
thse des gains du PID. Cette linarisation prendra en compte le point de fonctionnement
du systme. Finalement, le nombre dtapes par rapport la mthode actuelle nest pas
rduit, car il faut calculer autant de modles que de points de fonctionnement. En re-
vanche il ne sera plus ncessaire davoir un moyen dessai sauf pour le dveloppement et
la validation du modle thorique. Dautre part, le temps de calcul dun modle linaire
est de lordre de la seconde, bien plus rapide que le temps ncessaire pour la mise en place
du systme, suivi du lancement dune squence de SBPA et de lidentication associe.
Au nal, quelques heures suront pour raliser la calibration du contrle de la pression.
La gure 3.2 montre le nouveau principe que nous proposons. Dans cette mthode,
nous nintervenons ni sur lalgorithme de synthse des gains du contrle, ni sur la stratgie
de contrle.
Dans la dernire partie de ce manuscrit, nous prsentons les rsultats de cette mthode,
en partant de la modlisation du systme dcrite dans la partie II que nous comparons
avec le rsultat issu de lidentication, jusquaux essais du contrle en boucle ferme sur
un banc dessai.
Le modle tant bas sur la connaissance physique du systme, il sut alors pour un
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
28 Chapitre 3. Objectifs et contributions
2.1
acquisition
de donnes
contrleur
calibr
synthse
du contrleur
2.n
acquisition
de donnes
contrleur
calibr
concatnation
3
test et
validation
calcul thorique
du modle
1.1
1.n
Fig. 3.2 Remplacement des essais vhicule par une approche thorique pour lobtention
des modles du systme
nouveau systme de modier les paramtres du modle, puis de relancer la synthse dun
contrleur. Avec la mthode actuelle, il faudrait relancer les campagnes de mesure sur
vhicule ou banc dessai avant de refaire la synthse du contrleur.
La seconde mthode que nous proposons utilise des techniques de contrle avances
permettant de prendre en compte la variation des paramtres qui inuent sur le comporte-
ment dynamique du systme (e.g. le rgime moteur, etc.). La mthodologie de calibration
du contrle de la pression dinjection sera modie pour les deux tapes dobtention du
modle et de conception de la loi de commande.
Nous avons choisi de modliser le systme sous la forme dun modle linaire para-
mtres variants (LPV). Il sut alors pour connatre le comportement linaire du systme,
un point de fonctionnement donn, dappliquer ce modle aux valeurs des paramtres
ce point de fonctionnement.
La dmarche adopte ici consiste utiliser lapproche de commande robuste H
pour
les systmes paramtres variants, permettant ainsi dobtenir un contrleur squenc
par lensemble de ces paramtres (supposs mesurables). Cette mthode garantit, pour
synthse
du contrleur
3
test et
validation
calcul thorique
du modle
1
contrleur
calibr
2
Fig. 3.3 Calibration unique du contrleur pour lensemble des points de fonctionnement
du systme
toutes les variations des paramtres, cest--dire pour toute la plage de fonctionnement
du moteur, la stabilit interne du systme boucl, mais aussi le respect dun critre de
performance au sens H
. Outre cet avantage, la synthse est ralise en une seule tape
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
3.3. Propositions damlioration 29
ce qui rduit considrablement le temps de mise au point de la loi de commande (c.f. g.
3.3).
Le temps ncessaire pour la calibration du contrleur de la pression sera donc de
quelques minutes, sans avoir besoin de raliser des essais au pralable pour obtenir un
modle. Dautre part, les performances seront meilleures puisque nous utiliserons un al-
gorithme de synthse de contrleur plus performant que celui dorigine (qui permet de
calibrer les gains des PID), et le contrleur pourra avoir une structure plus complexe
quun PID.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
30 Chapitre 3. Objectifs et contributions
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
Deuxime partie
Modlisation
31
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
4
Lactionneur de remplissage
Sommaire
4.1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2 Le circuit lectrique . . . . . . . . . . . . . . . . . . . . . . . 33
4.3 Le circuit magntique . . . . . . . . . . . . . . . . . . . . . . 35
4.4 Le systme masse-ressort . . . . . . . . . . . . . . . . . . . . 35
4.5 Le systme hydraulique . . . . . . . . . . . . . . . . . . . . . 37
4.5.1 Calcul de la section de passage . . . . . . . . . . . . . . . . 37
4.5.2 Calcul du coecient de dbit de Bernouilli . . . . . . . . . 38
4.6 Modle non-linaire . . . . . . . . . . . . . . . . . . . . . . . 39
4.7 Modle linaire . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.8 Test et validation du modle de lIMV . . . . . . . . . . . 43
4.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.1 Structure
La gure 4.1 montre la structure mcanique de lIMV. Il sagit dun systme masse-
ressort o lapport dune force magntique permet de modier la position des masses.
Le pilotage en tension dune bobine autour dune partie de la masse dplacer cre un
courant et donc un champ magntique. Selon la position de la masse 1, nous pouvons
contrler lalimentation en carburant de la pompe HP.
La gure 4.2 montre les direntes parties physiques qui composent lIMV. Nous pro-
posons dans la suite un modle de chacun des lments pour obtenir le modle complet
de lactionneur.
4.2 Le circuit lectrique
Le circuit lectrique se rduit la bobine de lIMV, reprsente lectriquement comme
une inductance L
imv
en srie avec une rsistance R
imv
. LIMV est commande par une
33
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
34 Chapitre 4. Lactionneur de remplissage
reservoir
pompe
bobine
bobine
ressort
avant
ressort
arriere
masse 1
masse 2
Fig. 4.1 Structure mcanique de lIMV
masse
[V ]
hydraulique
Bobine
Circuit
lectrique
Tension Courant
[A]
Force
[N]
Position
[m]
Dbit
[m
3
.s
1
]
Systme
magntique
Circuit
Systme
ressort
V
imv
I
imv F
imv
x
imv Q
imv
Fig. 4.2 Synoptique de lIMV
tension ralise par un rapport cyclique douverture (RCO
9
) (gure 4.3).
T
T
on
0
V
batt
Fig. 4.3 Signal PWM de la commande de lIMV
Le rapport cyclique est dni comme le rapport entre la dure T
on
et la priode T.
La tension moyenne U
imv
alors applique sur lIMV est :
U
imv
= V
batt
(4.1)
o V
batt
est la tension de la batterie.
Cette tension U
imv
aux bornes de la bobine engendre un courant I
imv
, donnant lieu
un champ magntique utilis pour dplacer la partie mobile de lIMV et ainsi contrler
louverture des orices.
9
en anglais PWM pour Pulse Width Modulation
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
4.3. Le circuit magntique 35
Lquation lectrique de la bobine scrit :
U
imv
= L
imv
dI
imv
dt
+ R
imv
I
imv
(4.2)
En introduisant la variable de Laplace s nous obtenons la fonction de transfert suivante :
I
imv
(s)
U
imv
(s)
=
1
R
imv
1 +
L
imv
R
imv
s
(4.3)
4.3 Le circuit magntique
Dans un objectif de linarit pour le contrle du dbit de lIMV, le circuit magntique
a t conu de telle sorte que la force lectromagntique soit constante dans une certaine
plage de fonctionnement. [8] prsente les direntes formes polaires et leur eet vis--
vis de la commande. La gure 4.4 montre quatre formes polaires direntes, ayant des
caractristiques galement direntes, prsentes sur la gure 4.5.
La conception de lIMV est telle que nous utiliserons lhypothse de la forme polaire
c. Le dplacement de la masse mobile est susamment rduit pour considrer que nous
utilisons lIMV dans la zone o le gain lectromagntique est constant. Le transfert entre
le courant de lIMV et la force qui en rsulte scrit comme suit :
F
imv
= K
imv
I
imv
(4.4)
F
imv
, force lectromagntique cre par la bobine [N],
K
imv
, gain lectromagntique,
4.4 Le systme masse-ressort
Cest le systme mcanique de lIMV. Il est constitu de deux ressorts, dune masse
mobile compose de deux parties, le tout immerg dans le carburant sous faible pression
(de lordre de quelques bars).
Si on appelle x
imv
le dplacement de lIMV, tel que dni la gure 4.6, alors le
principe fondamental de la dynamique donne lquation suivante :
F = m
imv
x
imv
(4.5)
o
F est lensemble des forces appliques au systme, m
imv
la masse de la partie
mcanique mobile et x
Imv
lacclration de la partie mobile. Lquation (4.5) se dveloppe
comme suit :
F
imv
x
imv
(K
r
+ K
f
) x
imv
= m
imv
x
imv
(4.6)
o reprsente la viscosit du carburant, K
r
et K
f
les raideurs des ressorts avant et
arrire de lactionneur, x
imv
et x
imv
respectivement la position et la vitesse de la masse.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
36 Chapitre 4. Lactionneur de remplissage
/
B
c
T
Fig. 4.4 Quelques formes polaires
/
F
X
B
c
T
Fig. 4.5 Force lectromagntique en fonction du dplacement selon la forme polaire
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
4.5. Le systme hydraulique 37
En utilisant la variable de Laplace s, nous pouvons alors crire la fonction de transfert
du systme mcanique de lIMV :
F
imv
s x
imv
(K
r
+ K
f
) x
imv
= s
2
m
imv
x
imv
x
imv
_
s
2
m+ s + K
r
+ K
f
_
= F
imv
x
imv
F
imv
=
1
Kr+K
f
1 +
Kr+K
f
s +
m
Kr+K
f
s
2
(4.7)
4.5 Le systme hydraulique
LIMV comporte deux paires dorices diamtralement opposs. La position et le dia-
mtre de ces orices peuvent tre dirents entre eux an doptimiser la variation du dbit
traversant lIMV et ainsi accrotre les performances vis--vis du contrle du remplissage
de la pompe.
Le dbit de lIMV satisfait lquation de Bernouilli [7] suivante :
Q
imv
= C
qimv
S
imv
_
2 [P
T
P
ch
[
_
(4.8)
avec :
C
qimv
le coecient de perte de charge (SU
10
),
S
imv
la section de passage de lIMV [m
2
],
P
T
la pression de transfert du circuit basse pression [Pa],
P
ch
la pression dans le volume en entre de la pompe [Pa],
la masse volumique du carburant en entre pompe [kg/m
3
].
Les paramtres de lquation (4.8) sont explicits dans ce qui suit.
4.5.1 Calcul de la section de passage
Nous prsentons le dtail du calcul pour un orice, il sut ensuite dadapter les para-
mtres selon les caractristiques de lIMV. Laire de passage est la partie non recouverte
par un piston dun orice circulaire (g. 4.6).
La section de passage scrit de la manire suivante :
S
imv
= ( sin())
d
2
8
(4.9)
o :
= 2 acos
_
1
2 x
imv
d
_
(4.10)
10
Sans Unit
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
38 Chapitre 4. Lactionneur de remplissage
d
x
imv
x
imv
d
Fig. 4.6 Orice de lIMV
avec d le diamtre de lorice et langle tel quil est reprsent gure 4.6. La section de
passage dun orice scrit alors :
S
imv
=
_
2 acos
_
1
2 x
imv
d
_
sin
_
2 acos
_
1
2 x
imv
d
___
d
2
8
(4.11)
4.5.2 Calcul du coecient de dbit de Bernouilli
C
qimv
(x
imv
) = C
q
tanh
_
_
2
h
d
(x
imv
)
_
2|P
T
P
ch
|
crit
_
_
(4.12)
avec :
C
q
, la valeur maximale du coecient de dbit C
q
[SU],
h
d
, le diamtre hydraulique [m
2
],
, le coecient de viscosit du carburant [N/m/s],
, la masse volumique du carburant [kg/m
3
],
crit
, la valeur laminaire critique,
Calcul du diamtre hydraulique
Le diamtre hydraulique se calcule littralement partir de la section de passage :
h
dimv
=
S
imv
+ 2 sin
_
2
_ (4.13)
La gure 4.7 montre la variation du dbit de lIMV Q
imv
selon lquation (4.8) (pour
une conguration du systme donne, i.e. selon les caractristiques hydrauliques la fonc-
tion sera dirente) en fonction de la position x
imv
. Nous pouvons constater que la courbe
est non linaire, ce qui signie que le modle linaire de lIMV aura un gain qui variera
en fonction de la position de lIMV.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
4.6. Modle non-linaire 39
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
0
20
40
60
80
100
120
Position x
imv
[mm]
D
b
i
t
Q
i
m
v
[
l
/
h
]
Fig. 4.7 Dbit de lIMV
4.6 Modle non-linaire
Les quations (4.3), (4.4), (4.7) et (4.8) permettent dcrire le modle non linaire de
lIMV tel quil est reprsent la gure 4.2.
La gure 4.8 montre la non linarit de lIMV. En eet, si nous appliquons un mme
chelon de tension de 0, 1 Volt (soit un dplacement de la partie mobile de lIMV denviron
20, 5m) pour une faible ouverture de lIMV (x
imv
= 0, 04 mm donnant un dbit Q
imv
= 3
l/h) et pour une grande ouverture (x
imv
= 0, 3 mm donnant un dbit de Q
imv
= 66 l/h),
lamplitude de la variation de dbit de lIMV est dirente.
Nous pouvons facilement constater que la variation de dbit en rgime tabli est bien
plus faible lorsque lIMV est presque ferm (rapport de gain de 3, 66). Ceci sexplique par
le fait que la variation de la section de passage, pour un mme dplacement de la masse,
nest pas identique selon le point de fonctionnement de lIMV (i.e. la valeur de x
imv
).
Cette explication est illustre sur la gure 4.9, o nous voyons bien que laire de la section
de passage hachure est bien plus importante lorsque lIMV est plus ouverte.
4.7 Modle linaire
Les autres lments de lIMV sont considrs comme linaires, ainsi seule la partie
hydraulique, telle que nous lavons modlise, contient une non linarit. Pour obtenir
un modle linaire en fonction de la position x
imv
, il faut linariser le dbit Q
imv
en
fonction de la position x
imv
de lIMV. Les autres parties de lIMV tant linaires, il sura
de mutliplier lensemble par le gain hydraulique linaris pour obtenir le comportement
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
40 Chapitre 4. Lactionneur de remplissage
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
2
4
6
8
10
Temps [s]
D
b
i
t
Q
i
m
v
[
l
/
h
]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
57
59
61
63
65
67
Temps [s]
D
b
i
t
Q
i
m
v
[
l
/
h
]
x
imv
= 0,04 mm
x
imv
= 0,3 mm
Fig. 4.8 Rponse de lIMV en dbit face un chelon de tension U
imv
= 0, 1V pour
deux points de fonctionnement dirents
x
imv
x
imv
Fig. 4.9 Variation de laire de la section de passage de lIMV (partie hachure) selon le
point de fonctionnement
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
4.7. Modle linaire 41
linaire de lIMV autour dun point de fonctionnement.
Nous appelons x
0
imv
la valeur du point de fonctionnement de la position de lIMV x
imv
.
La drive partielle lquilibre (i.e. x
imv
= x
0
imv
) du dbit de lIMV en fonction de la
position x
imv
est la suivante :
Q
imv
x
imv
=
x
imv
_
C
qimv
S
imv
_
2 [P
T
P
ch
[
_
_
=
_
2 [P
T
P
ch
[
__
C
qimv
x
imv
S
imv
(x
0
imv
) + C
qimv
(x
0
imv
)
S
imv
x
imv
_
(4.14)
Daprs lequation (4.12), la drive partielle du coecient de dbit C
qimv
en fonction
de x
imv
est :
C
qimv
x
imv
= C
q
1
cosh
2
_
2
crit
_
2|P
T
P
ch
|
h
dimv
_
2
crit
2 [P
T
P
ch
[
h
dimv
x
imv
(4.15)
A partir de lquation (4.13) dnissant le diamtre hydraulique h
dimv
, celui-ci peut
scrire comme le rapport de deux fonctions :
h
dimv
=
S
imv
v(x
imv
)
(4.16)
avec v(x
imv
) = + 2 sin
_
2
_
= 2acos
_
1
2x
imv
d
_
+ 2 sin
_
acos
_
1
2x
imv
d
__
(4.17)
De lquation (4.16) on peut plus facilement calculer
h
dimv
x
imv
.
h
dimv
x
imv
=
S
imv
x
imv
v(x
0
imv
) S
imv
(x
0
imv
)
v
x
imv
v
2
(x
0
imv
)
(4.18)
La drive partielle de la section de passage donne :
rappel :
d(acos(u))
du
= (1 u)
1/2
du
S
imv
x
imv
=
d
2
1
_
1
_
1
2(x
0
imv
)
d
_
2
_
_
1 cos
_
2 arccos
_
1
2(x
0
imv
)
d
___
(4.19)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
42 Chapitre 4. Lactionneur de remplissage
Et celle de la fonction v(x
imv
) :
v
x
imv
= 2
x
imv
_
acos
_
1
2x
imv
d
__
+ 2
x
imv
_
sin
_
acos
_
1
2x
imv
d
___
=
2
_
1
_
1
2(x
0
imv
)
d
_
2
2
d
+ 2 cos
_
acos
_
1
2(x
0
imv
)
d
__
1
_
1
_
1
2(x
0
imv
)
d
_
2
2
d
=
4
d
_
1
_
1
2(x
0
imv
)
d
_
2
_
1 +
_
1
2(x
0
imv
)
d
__
v
x
imv
=
8
d
_
1
_
1
2(x
0
imv
)
d
_
2
_
1
(x
0
imv
)
d
_
(4.20)
La gure 4.10 montre la variation du gain hydraulique Q
imv
/x
imv
en fonction de la
position de lIMV. Nous retrouvons thoriquement lexplication faite prcdemment sur la
valeur du gain hydraulique en fonction de la position x
imv
: plus lIMV est ouvert, plus le
gain est grand. La cassure constate la position x
imv
= 0.25 mm est due la disposition
des orices.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Position x
imv
[mm]
D
r
i
v
e
d
u
d
b
i
t
[
(
l
/
h
)
/
m
]
Fig. 4.10 Linarisation du dbit de lIMV en fonction de la position x
imv
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
4.8. Test et validation du modle de lIMV 43
4.8 Test et validation du modle de lIMV
Les valeurs physiques de lIMV, telles que le poids des masses, la raideur des ressorts
etc., ont toutes t mesures et sont donc connues. La mesure des dirents paramtres a
t faite chaque fois sur plusieurs IMV.
Pour que la validation soit faite en condition relle, il faut que lIMV soit test sur
le systme Common Rail et non sur table, comme nous lavons fait pour la mesure des
caractristiques physiques. La seule mesure possible sur le systme est la position
11
de
lIMV, la mesure du dbit ntant pas possible. Dautre part le comportement du dbit,
sil tait mesur sur table, ne serait pas celui que nous aurions sur le systme car il ne
serait pas inuenc par les lments amont et aval (i.e. le circuit basse pression et la
pompe).
Nous proposons donc de valider le comportement lectromcanique de lIMV, cest-
-dire entre lentre de commande U
imv
et la position x
imv
. Ce test a t ralis sur un
banc dessai, sur lequel nous avons appliqu une srie dchelons
12
et avons mesur le
dplacement de la partie mobile de lactionneur.
Nous avons compar les rsultats de cet essai avec une simulation du modle lectro-
mcanique sur lequel nous avons appliqu la mme srie dchelons. La gure 4.11 montre
le rsultat temporel comparatif entre le banc dessai et notre simulation. Laquisition de la
29 29.1 29.2 29.3 29.4 29.5 29.6 29.7 29.8 29.9 30
Temps [s]
P
o
s
i
t
i
o
n
r
e
l
a
t
i
v
e
mesures
modle
Fig. 4.11 validation temporelle du modle lectromcanique de lIMV
mesure du dplacement de lIMV sur le banc dessai avait une priode dchantillonnage
11
cette mesure est faite sur des actionneurs instruments pour la phase de dveloppement uniquement
12
car il sagit de la seule forme de signal disponible dans lECU pour exciter la commande de lIMV
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
44 Chapitre 4. Lactionneur de remplissage
de 30 ms, ce qui explique la forme rectangulaire du signal mesur.
Le rsultat obtenu est trs satisfaisant car nous pouvons constater une forte simulitude
entre le rsultat du dplacement mesur et celui de notre modle. Nanmoins, nous pou-
vons apercevoir quelques dirences qui peuvent tre dues des phnomnes hydrauliques
qui ne sont pas pris en compte dans le modle. En eet si nous revenons la gure 4.1, le
carburant traversant lIMV, comme lindiquent les ches pointilles, circule galement au
travers des masses par des orices et va immerger le ressort arrire. Ceci est fait notam-
ment dans le but dquilibrer les forces exerces de chaque ct des masses. Nanmoins,
le dplacement des masses cre des variations de volumes (p.e. gauche de la masse 2),
ce qui engendre une variation de pression et donc un transfert de dbit. Cette circulation
du carburant a forcment un eet sur le dplacement des masses et contribue expliquer
lerreur rsiduelle.
4.9 Conclusion
Le modle de lIMV que nous venons de dvelopper prsente une non linarit qui
se situe sur le gain hydraulique de lactionneur. En eet, la validation du comportement
lectromcanique de lactionneur (g. 4.11), i.e. lvolution de la position x
imv
par rapport
la commande U
imv
, montre que le modle peut tre considr comme linaire sur cette
partie. En revanche, le dbit de lactionneur dni par lquation (4.8) contient la non
linarit statique de lactionneur. Ceci est mis en vidence la gure 4.8 o nous pouvons
constater que pour deux points de fonctionnement dirents, la variation du dbit de
lactionneur Q
imv
nest pas la mme pour une mme variation de commande U
imv
.
Le calcul du linaris tangent du gain hydraulique (eq. (4.14)) donne la valeur linaire
du gain en fonction de la position x
imv
de lactionneur (g. 4.10). Le modle linaire de
lIMV permet de dnir la variation de dbit Q
imv
en fonction dune variation U
imv
de
la commande et ceci pour une position x
0
imv
donne. La gure 4.12 montre lquivalence
entre le modle non linaire de lIMV et le modle linaire. Cette quivalence est vraie
uniquement autour du point de fonctionnement dni par x
0
imv
.
Cette non linarit a linconvnient de dpendre dune variable non mesurable sur les
systmes en srie. En dautres termes, cette variation du comportement de lactionneur
qui est fonction de sa position devra tre prise en compte dans la robustesse du contrleur
an de garantir la stabilit du systme quel que soit le point de fonctionnement de lIMV.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
4.9. Conclusion 45
systme
lectromcanique
U
imv x
imv
Q
imv
x
imv
x
0
imv
Q
imv
IMV
_
U
imv Q
imv
_
Q
0
imv
Q
imv
modle N.L.
U
imv
U
0
imv
Fig. 4.12 "Equivalence" entre le modle non linaire de lIMV et son modle linaire
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
46 Chapitre 4. Lactionneur de remplissage
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
6
Le rail
Sommaire
6.1 Prsentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.2 Fonctionnement du rail . . . . . . . . . . . . . . . . . . . . . 73
6.3 Modle du rail . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.4 Discrtisation du modle . . . . . . . . . . . . . . . . . . . . 74
6.1 Prsentation
Ltude du comportement de la pression au sein du rail peut tre analyse de ma-
nire trs prcise comme dans [1], o les phnomnes dondes sont utiliss pour dcrire
lvolution de la pression du carburant.
Pour notre cas dapplication, nous utilisons une approche beaucoup plus simple pour
la reprsentation du rail. En eet, le rail doit tre vu comme un accumulateur, qui fait
la somme de ses dbits entrants et sortants, et fait voluer la pression en fonction de
cette somme. Autrement dit, pour une somme positive des dbits un instant donn, la
pression augmente et vice-versa.
6.2 Fonctionnement du rail
Les lments relis au rail sont la pompe HP (relie par un tube), les injecteurs (gale-
ments relis par des tubes) et lactionneur de dcharge. De manire trs simple, si le dbit
global
15
des trois lments cits prcdemment traversant le rail est positif (i.e. la pompe
HP fournit plus de carburant que nen consomment les injecteurs et lactionneur de d-
charge), il y a alors un apport de carburant dans le rail, accompagn dune augmentation
de pression. A loppos, un dbit global ngatif traversant le rail va diminuer la pression
du carburant.
Llvation de la pression est fonction de deux paramtres :
15
nous dnissons le dbit global comme la somme des dbits, sachant quun dbit rentrant dans le rail
est considr positif et un dbit sortant est ngatif
73
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
74 Chapitre 6. Le rail
le volume du rail : plus il est grand, moins une mme variation du dbit global a
deet sur la pression,
le coecient de compressibilit du carburant : il est lui mme fonction de la pression
du carburant (plus la pression est leve, plus le coecient est grand) et de la
temprature.
Dans le cadre de notre tude pour le contrle de la pression dinjection, le rail peut
tre vu comme un accumulateur avec un gain dentre variable, ce qui le dnit comme
un systme non-linaire.
6.3 Modle du rail
Du point de vue mathmatique, le rail ralise lintgration du dbit global, dirence
des dbits entrants (i.e. pompe HP) et sortants (i.e. injecteurs et HPV). Lquation qui
rgit lvolution de la pression au sein du rail est la suivante :
P
r
=
K (P
r
, T)
V
(Q
ppe
Q
out
) (6.1)
o K [Pa] est le coecient de compressibilit du carburant qui dpend de la pression
rail P
r
et de la temprature T du carburant (g.6.1) et V [m
3
] est le volume du rail et des
tubes reliant les dirents organes au rail. Q
ppe
est le dbit instantan de la pompe, i.e.
la somme des dbits des plongeurs. Q
out
est le dbit des injecteurs et de lHPV lorsque
celle-ci est ouverte.
6.4 Discrtisation du modle
Nous allons prsent discrtiser le modle du rail selon la priode dchantillonnage
T
pge
(eq. 5.34). Dun point de vue physique, lvolution de la pression de linstant kT
pge
( k + 1 ) T
pge
est fonction de la dirence des dbits entre ces deux instants.
P
k+1
= P
k
+
K (P
k
, T
k
)
V
(V
ppe
V
out
) (6.2)
avec V
ppe
le volume de carburant refoul par la pompe pendant la priode T
pge
et V
out
le volume de carburant sortant du rail pendant cette mme priode.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
6.4. Discrtisation du modle 75
200
400
600
800
1000
1200
1400
1600
20
40
60
80
100
120
0.5
1
1.5
2
2.5
3
3.5
x 10
4
Pression [bar]
Temprature [C]
C
o
e
f
f
i
c
i
e
n
t
d
e
c
o
m
p
r
e
s
s
i
b
i
l
i
t
[
b
a
r
]
Fig. 6.1 Variation du coecient de compressibilit en fonction de la pression rail et de
la temprature du carburant
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
76 Chapitre 6. Le rail
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
7
Linjecteur
Sommaire
7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7.2 Modle non linaire . . . . . . . . . . . . . . . . . . . . . . . 77
7.3 Analyse dune simulation . . . . . . . . . . . . . . . . . . . . 80
7.4 Modle linaire . . . . . . . . . . . . . . . . . . . . . . . . . . 81
7.1 Introduction
Linjecteur, pilot lectroniquement, est capable de dlivrer de petites quantits plu-
sieurs fois lors dune mme injection, cest ce quon appelle un schma dinjection. Celui-ci
est constitu dune pre-injection qui permet de prparer la combustion, dune injection
principale et dune post-injection qui brle les gaz encore prsents dans la chambre de
combustion [13]. La pr-injection comme la post-injection peuvent tre elles mmes d-
composes en plusieurs injection. Dans le cadre du contrle de la pression rail, elles inter-
viennent comme des perturbations, puisquelles provoquent des variations de dbit dans
le rail (c.f. g. 2.12). Toutefois nous pouvons connatre la quantit de carburant inject,
cette perturbation est donc mesurable au sens de lautomatique. Le contrle de la pression
sera donc conu en tenant compte de cette connaissance pour amliorer les performances.
Le principe gnral de fonctionnement de linjecteur est relativement simple, bien
que compliqu modliser. Un modle dinjecteur prcis a t dvelopp par lquipe
simulation de Delphi sous le logiciel AMESim. Notre objectif tant de dterminer un
modle des injecteurs orient commande, nous utiliserons les simulations du modle de
linjecteur sous AMESim pour valider notre modle dvelopp dans la thse.
7.2 Modle non linaire
Deux modles ont t dvelopps pendant les travaux de thse. Le premier est un
modle continu permettant de simuler la leve de laiguille ainsi que tous les phnomnes
hydrauliques ; le second est un modle discret orient commande qui permet de modliser
77
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
78 Chapitre 7. Linjecteur
linjecteur dun point de vue volumtrique, prcisant quelle quantit de carburant a t
injecte entre deux instants sans se procuper de la manire.
Nous dnissons trois dbits propres linjecteur pour le modliser.
Q
f
, les fuites statiques,
Q
ctrl
, le dbit de contrle,
Q
cyl
, le dbit inject.
6.8 7 7.2 7.4 7.6 7.8 8 8.2
x 10
3
0
0.2
0.4
0.6
0.8
1
Temps [s]
D
b
i
t
[
l
/
m
i
n
]
6.8 7 7.2 7.4 7.6 7.8 8 8.2
x 10
3
0
1
Temps [s]
P
u
l
s
e
Dbit de contrle
Dbit inject
Pulse
Fig. 7.1 Dbits lors dune injection
La gure 7.1 montre les dbits de contrle et inject pour une demande donne. Ainsi,
le dbit Q
cyl
est dirent de zro lorsquil y a une injection, le reste du temps linjecteur
est ferm et aucun dbit ne va vers le cylindre. Il en est de mme pour le dbit de contrle
Q
ctrl
. En revanche, le dbit Q
f
est prsent tout le temps.
Pour mettre facilement en quation le dbit de linjecteur, nous discrtisons les d-
bits de linjecteur par la priode dchantillonnage T
e
telle quelle a t dnie lqua-
tion (5.34). Le systme dinjection sur lequel nous travaillons a des caractristiques telles
que nous avons autant de pompages que dinjections pour un tour moteur. Autrement
dit, pendant lintervalle de temps T
e
, il y a une injection comportant un dbit inject
Q
cyl
et un dbit de contrle Q
ctrl
. Puisque nous avons dni un intervalle de temps, nous
obtenons de ce fait un modle volumtrique. Ainsi, nous dnissons V
cyl
et V
ctrl
respecti-
vement comme le volume inject dans le cylindre et le volume de contrle. Le volume des
fuites statiques est tout simplement lintgration du dbit des fuites statiques sur linter-
valle T
e
. Nous pouvons crire lquation du volume total de linjecteur pour une priode
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
7.2. Modle non linaire 79
dchantillonnage comme suit :
V
inj
= V
cyl
+ V
ctrl
+
_
Te
0
Q
f
dt (7.1)
Le dbit des fuites statiques Q
f
est fonction de la pression rail (g. 7.2). Or, lors de
200 400 600 800 1000 1200 1400 1600
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Pression [bar]
D
b
i
t
[
l
/
h
]
Fig. 7.2 Fuite statique dun injecteur en fonction de la pression rail
lintgration du dbit Q
f
, nous ne pouvons pas prendre en compte la variation de la
pression pendant la priode dchantillonnage T
e
. Nous prennons donc la valeur de la
pression au dbut de la priode dchantillonnage. Lquation (7.1) scrit alors :
V
inj
(k) = V
cyl
(k) + V
ctrl
(k) + Q
f
(P
k
) T
e
(7.2)
Le volume V
inj
est donc la quantit de carburant qui va sortir du rail via les injecteurs,
entre linstant k T
e
et (k + 1) T
e
.
Les fuites statiques de linjecteur doivent tre multiplies par le nombre dinjecteurs
i
du systme. Nous pouvons maintenant intgrer le volume des injecteurs lquation
du rail :
P
k+1
= P
k
+
K
V
(V
ppe
(k) V
cyl
(k) V
ctrl
(k)
i
Q
f
(P
k
) T
e
)
P
k+1
= P
k
i
K
V
Q
f
(P
k
) T
e
+
K
V
(V
ppe
(k) V
cyl
(k) V
ctrl
(k))
(7.3)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
80 Chapitre 7. Linjecteur
Lquation (7.3) dnit le modle non linaire mono variable du systme dinjection, cest-
-dire avec lactionneur de dcharge ferm, dans lequel il faut faut rajouter le transfert
entre la commande de lIMV U
imv
et la sortie de la pompe V
ppe
pour crire le modle
complet.
7.3 Analyse dune simulation
Nous proposons la gure 7.3 un rsultat de simulation du modle dvelopp com-
portant lIMV, la pompe HP, le rail et les injecteurs pour voir lvolution de la pression
au sein du rail face aux dirents dbits. Le rgime moteur est de 1000 tr/min.
0.2 0.25 0.3
1100
1110
1120
1130
1140
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
0.2 0.25 0.3
0
1
2
3
4
5
x 10
5
Temps [s]
D
b
i
t
[
m
3
.
s
1
]
Dbit injecteurs
Dbit pompe
Pression rail
Fig. 7.3 Forme de la pression rail est des dirents dbits
Bien que les dbits soient discontinus (voir la forme de la pression rail), les volumes
entre chaque priode dchantillonnage T
pge
sont identiques. En eet nous constatons que
lvolution de la pression rail est cyclique. En eet, en prenant un point sur le trac de la
pression, nous constatons que 30 ms plus tard, nous retrouvons la mme valeur. Le signal
vu par le contrleur est donc stable, ce qui correspond bien au point de fonctionnement
simul.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
7.4. Modle linaire 81
7.4 Modle linaire
Nous allons prsent calculer le modle linaire partir de lquation (7.3). Pour
cela, nous calculons le linaris tangent du modle non linaire. Nous dnissons P
k+1
et V
k
comme respectivement la variation de la pression et du dbit autour dun point
de fonctionnement (P
k
= P
0
, V
k
= V
0
). Daprs lquation (7.3), le volume V
k
est gal
V
ppe
V
cyl
V
ctrl
. Nous avons alors :
P
k+1
=
P
k+1
P
k
P
k
+
P
k+1
V
k
V
k
(7.4)
Le premier terme du second membre qui est lexpression analytique du ple scrit :
P
k+1
P
k
= 1
i
T
e
(N
m
)
V
_
K(P
k
, T
k
)
P
k
Q
f
(P
k
) + K(P
k
, T
k
)
Q
f
(P
k
)
P
k
_
(7.5)
et le second terme :
P
k+1
V
k
=
K(P
k
, T
k
)
V
(7.6)
La variation du ple du systme rail-injecteurs varie donc selon la pression rail, le rgime
moteur et la temprature du carburant. La gure 7.4 montre lvolution en fonction de la
pression rail et du rgime moteur.
200
400
600
800
1000
1200
1400
1600
0
1000
2000
3000
4000
5000
6000
0.91
0.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
1
Pression [bar]
Rgime moteur [tr/min]
p
o
l
e
Fig. 7.4 Evolution du ple (eq. (7.5)) du systme rail-injecteurs
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
82 Chapitre 7. Linjecteur
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
8
Lactionneur de dcharge
Sommaire
8.1 Prsentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
8.2 tude des forces exerces sur lHPV . . . . . . . . . . . . . 85
8.2.1 Force hydraulique . . . . . . . . . . . . . . . . . . . . . . . 85
8.2.2 Force lectromcanique . . . . . . . . . . . . . . . . . . . . 86
8.2.3 Force mcanique . . . . . . . . . . . . . . . . . . . . . . . . 86
8.2.4 Force des eorts de jet . . . . . . . . . . . . . . . . . . . . 87
8.2.5 Viscosit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
8.2.6 Modle non-linaire . . . . . . . . . . . . . . . . . . . . . . 88
8.3 Analyse des rsultats thoriques . . . . . . . . . . . . . . . 90
8.3.1 Modle linaire, formulation gnrale . . . . . . . . . . . . 90
8.3.2 Linarisation du modle de la pression du rail . . . . . . . 90
8.3.3 Linarisation de lacclration de la bille . . . . . . . . . . . 92
8.3.4 Modle linaire du systme rail-HPV . . . . . . . . . . . . 93
8.3.5 Etude du systme Rail-HPV (Condentiel - Delphi) . . . . 94
8.3.6 Principe de fermeture de lHPV (Condentiel - Delphi) . . 97
8.1 Prsentation
LHPV permet de contrler un dbit en sortie du rail. Cette fuite de carburant est lie
plusieurs paramtres, allant des caractristiques mcaniques (paramtres statiques) la
pression dans le rail (paramtre dynamique), qui rend lexplication de son fonctionnement
trs complexe.
Cette fuite dpend principalement de la section de passage cre par lHPV. La taille
de la section est dtermine par le positionnement dune bille par rapport son assise
conique comme prsent sur la gure 8.1. Dautre paramtres interviennent sur la valeur
du dbit comme par exemple la masse volumique du carburant.
83
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
84 Chapitre 8. Lactionneur de dcharge
rail
rservoir
masse bille
bobine
bobine
ressort
Fig. 8.1 Structure mcanique de lHPV
La bille est soumise des forces qui contribuent son positionnement. Les direntes
forces qui entrent en jeu dans la dynamique de ce systme sont :
- la force lectromcanique F
e
, qui provient du courant traversant la bobine,
- la force mcanique F
m
, qui provient du ressort,
- la force hydraulique F
h
, qui provient de la pression du carburant dans le rail,
- la force de jet F
jet
, qui provient de la variation de vitesse du uide au niveau de la bille,
- la viscosit F
v
, qui provient des dirents frottements, sec et visqueux.
La gure 8.2 montre le synoptique gnral de lHPV sur lequel les direntes parties
physiques sont prsentes.
masse
[V ]
hydraulique
Bobine
Circuit
lectrique
Tension Courant
[A]
Force
[N]
Position
[m]
Dbit
[m
3
.s
1
]
Systme
magntique
Circuit
Systme
ressort
V
hpv
I
hpv
F
e
x
hpv Q
hpv
`
_
`
_
force
hydraulique
force
de jet
P
r
P
r
F
h
F
jet
[Pa]
[Pa]
Fig. 8.2 Synoptique de lHPV
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
8.2. tude des forces exerces sur lHPV 85
8.2 tude des forces exerces sur lHPV
Nous utilisons le principe fondamental de la dynamique (PFD) comme quation ini-
tiale, le modle du systme sera tendu au fur et mesure que nous rentrerons dans le dtail
de ltude des forces. Le PFD scrit :
F = m. x
hpv
(8.1)
o :
- F est lensemble des forces contribuant au dplacement de la bille [N],
- x
hpv
est la position de la bille [m],
- x
hpv
est lacclration de la bille [m
2
/s].
Lquation (8.1) est gnrique tout systme mcanique. Pour lappliquer au modle
de lHPV nous allons tudier toutes les forces cites prcdemment. Plusieurs notations
concernant les caractristiques mcanique de lHPV vont tre utilises, celles-ci sont pr-
sentes sur la gure 8.3.
,
d
b
d
a
S
p
Fig. 8.3 Structure mcanique de lHPV
o :
- est le demi-angle du cne de lassise de la bille [rad],
- d
b
est le diamtre de la bille [m],
- d
a
est le diamtre actif de la bille [m],
- S
p
est la section de passage du uide [m
2
],
- est langle entre la droite passant par le centre de la bille et le segment
le plus court partant du centre de la bille jusquau cne de lassise [rad].
8.2.1 Force hydraulique
Elle est due la pression du rail qui vient sappliquer sur la surface active de la bille.
Son expression est la suivante :
F
h
= P
r
.S
a
(8.2)
o :
- F
h
est la force hydraulique applique sur la bille [N],
- P
r
est la pression du rail [Pa],
- S
a
est la surface active de la bille o sapplique la pression [m
2
].
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
86 Chapitre 8. Lactionneur de dcharge
La surface S
a
se calcule grce au diamtre actif d
a
. Ce diamtre est normalement fonc-
tion du dplacement de la bille. Or, compte tenu de lordre de grandeur de ce dplacement
(quelques centimes de millimtre), il peut scrire sous la forme dune constante :
d
a
= d
b
. sin (8.3)
o :
- d
a
est le diamtre actif [m],
- d
b
est le diamtre de la bille [m],
- est langle reprsent sur la gure 8.3.
Dans ce cas langle est alors indpendant de la position et scrit :
=
2
(8.4)
o est langle reprsent sur la gure 8.3.
La surface active de la bille devient :
S
a
=
d
2
a
4
=
4
d
2
b
sin
2
(8.5)
8.2.2 Force lectromcanique
Au mme titre que ltude faite sur les formes polaires pour lIMV , la force lectro-
mcanique de lHPV F
e
est considre comme proportionnelle la constante K
ihpv
dans
toute sa plage de fonctionnement.
F
e
= K
ihpv
I
hpv
(8.6)
8.2.3 Force mcanique
Le ressort applique une force oppose celle de la pression et proportionnelle au
dplacement de la bille. Dautre part, lorsque lHPV est compltement ferme, le ressort
est dj comprim et prsente une force de pr-charge. Cette force initiale implique quune
pression minimale dans le rail est ncessaire pour que lHPV commence souvrir (si un
courant nul est appliqu). Sa formulation est la suivante :
F
r
= K
r
x
hpv
+ F
0
(8.7)
o :
- F
r
est la force cre par le ressort [N],
- K
r
est la raideur du ressort [N/m],
- F
0
est la force de pr-charge [N].
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
8.2. tude des forces exerces sur lHPV 87
8.2.4 Force des eorts de jet
Les eorts de jet [7] sont crs par un phnomne daspiration d la variation de la
vitesse du uide au niveau de la bille et a pour consquence de ramener la bille dans son
assise. Elle a donc la mme direction que celle du ressort. Lquation donnant les eorts
de jet est la suivante :
F
jet
= 2 C
q
(x
hpv
, P
r
) S
p
(x
hpv
) cos() P (8.8)
o :
C
q
est le coecient de perte de charge [SU
16
],
S
p
(x
hpv
) est la section de passage du uide, fonction de la position de la bille [m
2
],
P est lcart des pressions en amont (rail) et en aval (rservoir) de lHPV [Pa],
est langle de jet [rad].
Le coecient C
q
[7] varie selon la position de la bille et de lcart de pression P. Il
scrit :
C
q
= C
q
tanh
_
2
crit
_
(8.9)
avec :
- C
q
, la valeur maximale du coecient de dbit C
q
[SU],
- , la valeur du ow number [SU],
-
crit
, la valeur critique du ow number [SU].
Le ow number se calcule comme suit :
=
h
d
2 [ P [
(8.10)
o :
- h
d
est le diamtre hydraulique [m],
- est la viscosit due aux frottements visqueux du uide [N/m/s],
- est la masse volumique du uide [m
3
/kg].
Le diamtre hydraulique est fonction de la position de la bille et peut se simplier,
compte tenu des ordres de grandeur des valeurs, et donne alors :
h
d
= 2 cos x
hpv
(8.11)
La section de passage est fonction de la position de la bille et scrit :
S
p
(x
hpv
) = x
hpv
(d
b
+ x
hpv
cos()) sin() cos() (8.12)
La course de la bille tant trs petite par rapport son diamtre, nous pouvons ngliger
x
hpv
cos() (eq. (8.12)). De mme, la variation de la position est trs faible, ce qui implique
que langle peut tre considr constant et fonction du demi-angle de lassise (eq. 8.4).
La section de passage scrit alors :
16
Sans Unit
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
88 Chapitre 8. Lactionneur de dcharge
S
p
(x
hpv
) = d
b
sin
_
2
_
cos
_
2
_
x
hpv
(8.13)
On pose :
K
s
= d
b
sin
_
2
_
cos
_
2
_
(8.14)
Do :
S
p
(x) = K
s
x
hpv
(8.15)
Dautre part, P correspond lcart de pression du uide entre le rail et le rservoir.
Or la pression dans le rservoir est celle de latmosphre, donc trs faible par rapport la
pression du rail. Ainsi dans la suite de ltude, le terme P sera remplac par la pression
du rail P
r
.
Lquation (8.8) scrit ainsi :
F
jet
= 2 C
q
tanh
_
_
2
2cos()x
hpv
_
2|Pr|
crit
_
_
K
s
cos() P
r
x
hpv
(8.16)
8.2.5 Viscosit
Leort d la viscosit scrit :
F
v
= B + (P
r
) x
hpv
(8.17)
o :
- B est la force due aux frottements secs [N],
- est la viscosit due aux frottements visqueux [N/m/s],
- x
hpv
est la vitesse de la bille [m/s].
8.2.6 Modle non-linaire
Nous allons maintenant rcrire lquation (8.1), concernant la dynamique du systme,
en dtaillant lensemble des forces. Ceci donne lquation de la dynamique suivante :
F
h
F
r
F
e
F
jet
F
v
= m x
hpv
(8.18)
ou encore :
P
r
S
a
F
e
F
0
K
r
x
hpv
2 C
q
K
s
cos() P
r
x
hpv
B x
hpv
= m x
hpv
(8.19)
Pour continuer ltude, il faut prsent utiliser le modle du rail, qui va permettre de
complter lquation prcdente.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
8.2. tude des forces exerces sur lHPV 89
Lquation du rail connect lHPV est la suivante :
P
r
=
K
V
(Q
in
Q
hpv
S
a
x
hpv
) (8.20)
o :
- K est le coecient de compressibilit du uide [Pa],
- V est le volume du rail [m
3
],
- Q
in
est le dbit entrant dans le rail [m
3
/s],
- Q
hpv
est le dbit sortant du rail par lHPV [m
3
/s],
- S
a
est la surface active de la bille [m
2
].
Le comportement dynamique de lHPV donne la vitesse et la position de la bille mais
en aucun cas le dbit du uide qui le traverse. Ce dbit scrit selon lquation de Bernoulli
[7] comme suit :
Q
hpv
= C
q
(x
hpv
, P
r
) S
p
(x
hpv
)
2 P
r
(P
r
)
(8.21)
Soit :
Q
hpv
= C
q
tanh
_
_
2
2cos()x
hpv
(x
hpv
)
_
2Pr
(Pr)
crit
_
_
K
s
x
hpv
2 P
r
(P
r
)
(8.22)
On pose :
x
1
= x
hpv
, position de la bille,
x
2
= x
hpv
, vitesse de la bille.
Nous pouvons alors crire le modle non-linaire du systme rail/HPV sous la forme
dtat suivante :
_
_
P
r
x
1
x
2
_
_
=
_
_
K
V
(Q
in
Q
hpv
S
a
x
2
)
x
2
1
m
(F
h
F
r
F
e
F
jet
F
v
)
_
_
(8.23)
La reprsentation dtat avec les valeurs littrales dveloppes donne :
_
_
P
r
x
1
x
2
_
_
=
_
_
_
_
K
V
_
Q
in
C
q
tanh
_
2
2cos()x
1
(Pr)
_
2Pr
(Pr)
crit
_
K
s
x
1
_
2Pr
(Pr)
S
a
x
2
_
x
2
2
m
C
q
(x
1
, P
r
) K
s
cos() P
r
x
1
Kr
m
x
1
B
m
(Pr)
m
x
2
+
Sa
m
P
r
Fe
m
F
0
m
_
_
_
_
(8.24)
avec comme entres de commande Q
in
et F
e
.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
90 Chapitre 8. Lactionneur de dcharge
8.3 Analyse des rsultats thoriques
8.3.1 Modle linaire, formulation gnrale
Le principe de la linarisation est dobtenir une reprsentation linaire du systme non
linaire autour du point de fonctionnement du systme. La gure 8.4 illustre le principe
avec u
0
et y
0
reprsentant le point de fonctionnement et u
et y
les variations autour de
ce point de fonctionnement (u = u
0
+ u
, y = y
0
+ y
).
_
u
u
0
u
y
0
y
y
NL
L
u
Fig. 8.4 Linarisation dun systme non linaire
La formule permmettant de calculer le linaris tangent est la suivante :
_
_
2
_
_
=
_
_
_
Pr
Pr
Pr
x
1
Pr
x
2
x
1
Pr
x
1
x
1
x
1
x
2
x
2
Pr
x
2
x
1
x
2
x
2
_
_
_
_
_
P
r
x
1
x
2
_
_
+
_
_
_
Pr
Q
in
Pr
Fe
x
1
Q
in
x
1
Fe
x
2
Q
in
x
2
Fe
_
_
_
_
Q
in
F
e
_
(8.25)
Les drivs partielles sont appliques lquilibre (i.e. P
r
= P
0
r
, x
1
= x
0
1
, x
2
= x
0
2
,
Q
in
= Q
0
in
et F
e
= F
0
e
). An de simplier lcriture des linariss tangent qui suivent nous
ne prciserons pas le point dquilibre.
8.3.2 Linarisation du modle de la pression du rail
En substituant la premire ligne de lquation (8.23), nous obtenons la formule math-
matique qui dnit le comportement de la pression. En se rapportant lquation (8.25),
nous pouvons alors calculer le linaris tangent de la drive de la pression.
r
=
1
V
_
K
P
r
Q
hpv
+ K
Q
hpv
P
r
_
P
+
K
V
Q
hpv
x
1
x
K
V
S
a
x
2
+
K
V
Q
in
(8.26)
Le dbit Q
in
est lensemble des dbits entrant et sortant du rail, cest--dire le dbit de
la pompe Q
ppe
et les dbits des injecteurs Q
cyl
, Q
ctrl
et
i
Q
f
. An dallger les quations
nous dnissons
Q = Q
ppe
Q
cyl
Q
ctrl
.
Nous posons galement :
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
8.3. Analyse des rsultats thoriques 91
K
1
=
Q
hpv
x
1
,
K
2
=
Q
hpv
Pr
.
Lquation (8.26) se rcrit comme :
r
=
1
V
_
K
P
r
Q
hpv
+ KK
2
_
P
+
K
V
K
1
x
K
V
S
a
x
i
V
_
K
P
r
Q
f
+ K
Q
f
P
_
P
+
K
V
_
Q
_
(8.27)
Lobjectif prsent est le calcul des gains K
1
et K
2
qui sont fonctions de la pression
P
0
r
et de la position x
0
1
dquilibre. En utilisant lexpression (8.21) de Q
hpv
, les gains sont
alors :
K
1
= K
s
2 P
r
(P
r
)
_
C
q
(x
1
, P
r
)
x
1
x
1
+ C
q
(x
1
, P
r
)
_
(8.28)
K
2
= K
s
x
1
_
_
C
q
(x
1
, P
r
)
P
r
2 P
r
(P
r
)
+ C
q
(x
1
, P
r
) 0, 5
_
2 (P
r
) 2 P
r
d((Pr))
dPr
2
(P
r
)
_
(P
r
)
2 P
r
_
_
(8.29)
rappel :
d
dx
__
U(x)
V (x)
_
=
1
2
_
dU(x)
dx
V (x)U(x)
dV (x)
dx
V
2
(x)
_
_
V (x)
U(x)
La drive de la masse volumique en fonction de la pression P
r
se calcule facilement.
Le calcul de
Cq(x
1
,Pr)
x
1
et de
Cq(x
1
,Pr)
Pr
est expliqu ci-dessous.
Tout dabord posons :
K
1cq
=
C
q
(x
1
, P
r
)
x
1
K
2cq
=
C
q
(x
1
, P
r
)
P
r
Ainsi les calculs des gains qui permettent dobtenir la valeur du coecient C
q
pour un
point de fonctionnement sont :
K
1cq
=
C
q
cosh
2
_
2
2cos()x
1
(Pr)
_
2Pr
(Pr)
crit
_
2
2cos()
(Pr)
_
2Pr
(Pr)
crit
(8.30)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
92 Chapitre 8. Lactionneur de dcharge
rappel :
d(tanh(u(x)))
dx
=
1
cosh
2
(u(x))
du(x)
dx
K
2cq
=
C
q
cosh
2
_
2
2cos()x
1
crit
2Pr
(Pr)
(Pr)
_
d
_
2Pr
(Pr)
(Pr)
_
dP
r
(8.31)
O :
d
_
2Pr
(Pr)
(Pr)
_
dP
r
=
d
2Pr
dPr
(P
r
)
_
(P
r
)
2 P
r
d(Pr)
dPr
_
(P
r
) + (P
r
)
d
(Pr)
dPr
2
(P
r
) (P
r
)
(8.32)
Lquation (8.27) peut maintenant tre calcule via les quatre coecients K
1cq
, K
2cq
,
K
1
et K
2
, ce qui nous donne la premire ligne de la repsentation dtat du systme
rail/HPV.
8.3.3 Linarisation de lacclration de la bille
Nous nous intressons ici la dernire ligne de lquation (8.23) en eectuant les calculs
tels quils sont prsents lquation (8.25). En se rapportant lquation (8.24) nous
pouvons crire rapidement le linaris tangent de lacclration de la bille comme suit :
2
=
1
m
__
F
h
P
r
F
jet
P
r
F
v
P
r
_
P
_
F
r
x
1
+
F
jet
x
1
_
x
F
v
x
2
x
2
F
e
_
(8.33)
Posons :
K
j
=
F
jet
x
1
, assimilable une raideur [N/m/s],
S
j
=
F
jet
Pr
, assimilable une section [m
2
],
K
v
=
Fv
x
2
,
S
v
=
Fv
Pr
.
Ceci donne alors :
2
=
1
m
__
dF
h
dP
r
S
j
S
v
_
P
_
dF
r
dx
1
+ K
j
_
x
1
K
v
x
2
F
e
_
(8.34)
Le calcul des deux autres drives est trivial et nest pas dvelopp. Pour le calcul de
K
j
, rappelons lquation (8.8) donnant la formule des eorts de jet
F
jet
= 2 C
q
(x
1
, P
r
) K
s
x
1
cos() P
r
(8.35)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
8.3. Analyse des rsultats thoriques 93
Les coecients K
j
et S
j
scrivent donc :
K
j
= 2 K
s
cos() P
r
_
C
q
(x
1
, P
r
)
x
1
x
1
+ C
q
(x
1
, P
r
)
_
(8.36)
S
j
= 2 K
s
x
1
cos()
_
C
q
(x
1
, P
r
)
P
r
P
r
+ C
q
(x
1
, Pr)
_
(8.37)
Soit daprs lquation (8.30) :
K
j
= 2 K
s
cos() P
r
[K
1cq
x
1
+ C
q
(x
1
, P
r
)] (8.38)
S
j
= 2 K
s
x
1
cos() [K
2cq
P
r
+ C
q
(x
1
, Pr)] (8.39)
Il reste maintenant calculer les deux derniers coecients K
v
et S
v
. En faisant rf-
rence lquation (8.17), il vient alors :
K
v
= (P
r
) (8.40)
S
v
= x
2
d(P
r
)
dP
r
(8.41)
8.3.4 Modle linaire du systme rail-HPV
Les dirents calculs prcdemment eectus, et appliqus la structure de lqua-
tion (8.25) permettent dobtenir le modle linaire du systme rail/HPV suivant :
_
_
2
_
_
=
_
_
/
11
KK
1
V
KSa
V
0 0 1
SaS
j
Sv
m
Kr+K
j
m
Kv
m
_
_
_
_
P
r
x
1
x
2
_
_
+
_
_
K
V
0
0 0
0
1
m
_
_
_
Q
F
e
_
(8.42)
o /
11
=
1
V
_
K
Pr
Q
hpv
+ K
Q
hpv
Pr
+
i
_
K
Pr
Q
f
+ K
Q
f
Pr
__
Les variations du modle (en fonction de la pression rail) sont traces jusqu 1000
rad.s
1
(g. 8.5), correspondant en discret, une priode dchantillonnage de lordre de
3.5 ms, ce qui est en dessous de la priode dchantillonnage maximale ( 5 ms). Nous
constatons que dans cette plage de frquence (0-600 rad/s), le comportement du systme
ne change quasiment pas.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
9
Modlisation LFT
Sommaire
9.1 Modles linaires paramtres variables (LPV) . . . . . . 101
9.2 Transformation linaire fractionnelle (LFT) . . . . . . . . 102
9.3 Reprsentation LFT dun systme linaire . . . . . . . . . 103
9.4 Extraction dun coecient variable sous forme LFT . . . 104
9.5 Ecriture du modle LFT du systme Common Rail . . . . 106
9.1 Modles linaires paramtres variables (LPV)
Les systmes que nous rencontrons dans la nature sont trs souvent non-linaires.
Leur comportement dynamique volue en fonction dune ou de plusieurs variables. Celles-
ci peuvent tre extrieures au systme, nous disons quelles sont exognes, ou bien propres
au systme, nous disons alors quelle sont endognes.
Pour modliser de tels systmes par un comportement linaire invariant, il faut ger les
variables exognes pour toujours obtenir la mme rponse du systme, et dans le cas des
variables endognes, faire en sorte que les sollicitations faites sur le systme ne provoquent
pas de changement du comportement dynamique d de trop grandes variations de ces
variables. Le modle linaire nest donc valable que pour un point de fonctionnement
donn ; plus le modle sen loigne, plus son comportement sloigne de celui du systme.
Les modles LPV [21, 17, 4] dcrivent le comportement linaire en fonction des va-
riables qui modient la rponse du systme. Si le modle contient des variables endognes,
il sagit dun modle quasi-LPV.
Les systmes LPV peuvent tre dnis sous forme dune reprsentation dtat dont
les matrices dpendent du vecteur , qui constitue lensemble des paramtres variants
eq. (9.1).
_
x(t) = A((t)) x(t) + B((t)) u(t)
y(t) = C ((t)) x(t) + D((t)) u(t)
(9.1)
Il est facile de voir que si le vecteur est g, alors les matrices A, B, C et D sont
constantes, et le systme (9.1) devient alors linaire invariant. La modlisation LPV dun
systme non-linaire permet donc de suivre lvolution du comportement linaire.
101
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
102 Chapitre 9. Modlisation LFT
Lobjectif de cette modlisation est de synthtiser un contrleur qui dpendra des
mmes paramtres variants. Nous dnirons ainsi un contrleur LPV qui permettra dadap-
ter la loi de commande en fonction du point de fonctionnement. Les variables, quelles
soient exognes ou endognes, doivent tre mesurables an de connatre ltat du systme.
Si cela nest pas possible, il faudra prendre en compte dans la robustesse du contrleur,
la plage de variation du modle an de garantir la stabilit en boucle ferme.
9.2 Transformation linaire fractionnelle (LFT)
La reprsentation LFT
18
est largement employe dans ltude des incertitudes. Un
modle LFT se rsume par linterconnection du systme M par le bloc , soit par le haut,
soit par le bas. Nous dnissons respectivement les fonctions F
u
(M, .) pour le bouclage
par le haut, soit upper LFT , et F
l
(M, .) pour le bouclage par le bas, soit lower LFT.
En dnissant M comme suit :
M =
_
M
11
M
12
M
21
M
22
_
, M
(p
1
+p
2
)(q
1
+q
2
)
(9.2)
la fonction T
u
scrit de la manire suivante :
y
M
M
u
q
w
y u
q
w
upper LFT
Lower LFT
Fig. 9.1 Reprsentation LFT
_
_
_
q = M
11
w + M
12
u
y = M
21
w + M
22
u
w = q
(9.3)
_
y = M
21
w + M
22
u
w = M
11
w + M
12
u
(9.4)
_
y = M
21
w + M
22
u
w = (I M
11
)
1
M
12
u
(9.5)
F
u
(M,
1
)
_
T
1
p
1
q
1
1
T
u
(M,
1
) = M
22
+ M
21
1
(I M
11
1
)
1
M
12
(9.6)
18
vient du terme anglais Linear Fractional Transformation
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
9.3. Reprsentation LFT dun systme linaire 103
sur le domaine :
T
1
=
_
1
q
1
p
1
, det (I M
11
1
) ,= 0
_
(9.7)
de faon analogue, nous obtenons pour la fonction T
l
:
F
l
(M,
2
)
_
T
2
p
2
q
2
2
T
l
(M,
2
) = M
11
+ M
12
2
(I M
22
2
)
1
M
21
(9.8)
sur le domaine :
T
2
=
_
2
q
2
p
2
, det (I M
22
2
) ,= 0
_
(9.9)
9.3 Reprsentation LFT dun systme linaire
Les sytmes linaires mis sous forme de reprsentation dtat telle que prsents
lquation (9.10)
_
x = A x + B u
y = C x + D u
(9.10)
ou encore sous forme matricielle :
_
x
y
_
=
_
A B
C D
__
x
u
_
(9.11)
peuvent facilement se schmatiser par linterconnexion par le haut entre la matrice
M =
_
A B
C D
_
et le bloc I
n
1
s
, o n est gal au nombre dtats (g. 9.2). Compte tenu de
A B
C D
I
n
1
s
y
u
x
x
Fig. 9.2 Forme LFT dun systme linaire sous forme de reprsentation dtat
la forme de linterconnexion de la gure 9.2, nous en dduisons que le transfert de lentre
u vers la sortie y est dni par linterconnexion par le haut telle que dnie en (9.6) :
(9.12)
T
u
(S, I
n
1
s
) = D + C
1
s
_
I
n
A
1
s
_
1
B
= D + C (sI
n
A)
1
B = M(s)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
104 Chapitre 9. Modlisation LFT
9.4 Extraction dun coecient variable sous forme LFT
Nous dnissons un gain variable (
v
, ayant respectivement comme entre et sortie les
signaux u et y, tel que dni lquation (9.13).
y = (
v
u (9.13)
Dans la mesure o (
v
est born par une valeur minimale et maximale, nous pouvons
dnir la valeur nominale (
0
quidistante des deux extrema, et la valeur (
a
, pouvant tre
interprte comme une amplitude qui permet datteindre les deux valeurs extrmes de (
v
partir de la valeur nominale. Nous dnissons une variable
G
variant entre 1 et 1,
qui permet de moduler la valeur (
a
. Finalement, le gain (
v
scrit comme suit :
(
v
= (
0
+
G
(
a
(9.14)
La gure 9.3 rsume graphiquement lcriture du gain variable. On pose q = (
a
u et
(
v
u
y
`
_
(
a
G
(
0
u
y
q
w
Fig. 9.3 Reprsentation LFT dun gain variable
w =
G
q et nous eectuons lextraction de la variable
G
par rapport au reste du gain
comme cela est prsent la gure 9.4.
Le systme ainsi obtenu est le suivant :
_
q
y
_
=
_
0 (
a
1 (
0
__
w
u
_
(9.15)
avec w =
G
q. Sur un systme complet tel que celui de la pression rail, il sut de
localiser les dirents gains variables, de les extraire du systme ce qui a pour consquence
daugmenter autant de fois le nombre dentre sortie du systme quil y a de gain variable,
et ensuite runir en bloc diagonal lensemble des gains variables. La gure 9.5 rsume ces
direntes tapes. Nous avons utilise cette mthodologie pour obtenir le modle LFT du
systme Common Rail, prsent dans la section suivante avec lapplication au modle du
rail uniquement.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
9.4. Extraction dun coecient variable sous forme LFT 105
`
_
(
a
G
(
0
u
y
q w
`
_
(
a
G
(
0
u
y
q
w
Fig. 9.4 Mise sous forme LFT dun gain variable
2
u
y
2
u
y
i
u
y
1
s
M(s) 1
s
1
s
1
s
1/
2/
3/
Fig. 9.5 Extraction des paramtres variables pour une mise sous forme LFT : 1/ loca-
lisation des paramtres variants, 2/ extraction, 3/ criture du modle LFT
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
106 Chapitre 9. Modlisation LFT
9.5 Ecriture du modle LFT du systme Common Rail
Nous prsentons dans cette partie la mthodologie employe pour obtenir le modle
LFT du systme Common Rail. Nous ne prsenterons pas les quations de modle obtenu,
car celle-ci sont complexes, et napportent aucun lment intressant.
Nous partons du modle non-linaire prcdemment dvelopp, dni comme suit :
_
x = T (P, N
m
, X
imv
, T, x, u)
y = ( (P, N
m
, X
imv
, T, x, u)
(9.16)
o x
9
, y est la pression rail et u est la commande U
imv
dans le cas o lHPV
est ferme ou u
2
est le vecteur de commande [U
imv
; U
hpv
] dans le cas o lHPV est
ouverte.
Lquation (9.16) dcrit le comportement du systme en fonction des direntes va-
riables, quelles soient endognes, comme la pression P
r
, ou exognes, comme le rgime
moteur N
m
.
partir du modle non-linaire (9.16), le linaris tangent (eq. (9.17)) dnit le com-
portement linaire en fonction des variables P
r
,N
m
,X
imv
et T.
_
x
=
F
x
x
+
F
u
u
=
G
x
x
+
G
u
u
(9.17)
soit
_
x
= /(P
r
, N
m
, X
imv
, T) x
+ B (P
r
, N
m
, X
imv
, T) u
= c (P
r
, N
m
, X
imv
, T) x
+ T(P
r
, N
m
, X
imv
, T) u
(9.18)
Le modle est quasi-LPV car la matrice / dpend de la pression P
r
qui est une variable
dtat. Si nous geons les paramtres P
r
,N
m
,X
imv
et T, les quatre matrices /, B, c et T
du systme (9.18) sont constantes et nous avons alors une reprsentation dtat classique
dun systme linaire.
Le modle linaire (9.18) peut tre utilis pour faire la synthse de contrleur, comme
un PID, autour dun point de fonctionnement. Ce travail est prsent dans la partie mise
oeuvre o nous montrons la fois une comparaison entre le modle identi sur vhicule
et le modle linaire thorique, ainsi que les rsultats de contrle en boucle ferme,
partir dune calibration des correcteurs issue des modles thoriques.
Pour reprsenter prsent le modle LPV (9.18) du systme Common Rail sous forme
LFT, il faut extraire les paramtres variants comme cela a t prsent prcdemment.
Puisque nous souhaitons montrer comment le modle LFT est construit, nous nallons faire
lextraction des paramtres variants que sur la partie du modle du rail lorque lHPV est
ferme.
Rappel : le modle du rail est dni comme suit :
P
r
=
K
V
(Q
ppe
Q
f
) (9.19)
Pour eectuer le passage en temps discret, nous choisissons lapproximation suivante (m-
thode du rectangle infrieur) :
1
s
T
e
z
1
1 z
1
(9.20)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
9.5. Ecriture du modle LFT du systme Common Rail 107
Le modle du rail en temps discret scrit alors :
P
r
(k) = T
e
z
1
1 z
1
K
V
(Q
ppe
(k) Q
f
(k)) (9.21)
o le coecient de compressibilit K est fonction de la pression P
r
et de la temprature
du carburant T, la priode dchantillonnage T
e
est fonction du rgime moteur, et les
fuites statiques des injecteurs Q
f
sont galement fonctions de la pression P
r
. Finalement,
le modle linaris tangent scrit comme suit :
P
r
(k + 1) =
_
1
T
e
V
_
K
P
r
Q
f
+ K
Q
f
P
r
__
P
r
(k) +
T
e
K
V
Q
ppe
(k)
P
r
(k + 1) = /(P
r
, N
m
, T) P
r
(k) +B (P
r
, N
m
, T) Q
ppe
(k)
(9.22)
Lquation (9.22) montre que le temps de rponse et le gain du rail sont fonctions de
trois paramtres qui sont la pression, le rgime moteur et la temprature du carburant.
La gure 9.6 reprsente le schma-bloc du modle du rail.
/(P, N
m
, T)
`
_
z
1
Q
ppe
P
k
B (P, N
m
, T)
Fig. 9.6 Reprsentation graphique du modle LPV du rail
Pour extraire la partie variable des coecients / et B, nous dnissons les gains
comme une partie nominale laquelle sajoute une partie variable (positive ou ngative)
permettant de balayer ainsi toutes les valeurs possibles des coecients (9.23).
/ =
A0
+
A
A
B =
B0
+
B
B
(9.23)
o
A0
et
B0
sont respectivement les valeurs nominales des gains / et B,
A
et
B
les
amplitudes des deux gains an datteindre les valeurs minimales et maximales partir de
la valeur nominale. La valeur nominale est donc au centre des deux valeurs extrmes, et
les variables
A
et
B
varient entre 1 et 1. Les valeurs nominales et les amplitudes se
calculent trs facilement par :
x0
=
max (x) + min (x)
2
x
=
max (x) min (x)
2
(9.24)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
108 Chapitre 9. Modlisation LFT
avec x = / ou B.
Le schma de la gure 9.6 peut donc tre reprsent direment en prenant en compte
lcriture des gains comme (9.23). Il est prsent trs facile dextraire les variables
A
et
`
_
z
1
Q
ppe
P
k
`
_
B0
B
B
`
_
A0
q
B
w
B
w
A
q
A
Fig. 9.7 Reprsentation graphique du modle LPV du rail
B
. Pour cela il sut de dnir q
A
et q
B
comme de nouvelles sorties du systme et w
A
et
w
B
de nouvelles entres. La forme LFT du systme est alors obtenue en suivant les tapes
donnes sur les gures 9.8 et 9.9.
`
_
z
1
Q
ppe
P
k
`
_
B0
`
_
A0
q
B
w
B
w
A
q
A
P
k+1
Fig. 9.8 Extraction des paramtres variants
Le calcul du modle LFT du rail se fait donc partir de la gure 9.8 et donne le
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
9.5. Ecriture du modle LFT du systme Common Rail 109
rsultat suivant :
_
_
_
_
P
k+1
q
B
q
A
y
k
_
_
_
_
=
_
_
_
_
A
0
1 1
B
0
0 0 0
B
A
0 0 0
1 0 0 0
_
_
_
_
_
_
_
_
P
k
w
A
w
B
Q
ppe
_
_
_
_
(9.25)
P
k
w
B
w
A q
A
q
B
_
A
0
0
B
_
Q
ppe
RAIL
Fig. 9.9 Modle LFT du rail
La norme de
_
A
0
0
B
_
est infrieure ou gale 1. Cette caractristique sera utilise
lors de la synthse du contrleur avec lutilisation plus tard du thorme du petit gain.
En appliquant cette mthodologie lensemble du modle du systme Common Rail,
nous obtenons alors le modle LFT. Le modle monovariable (i.e. une entre de com-
mande : lIMV et une sortie : la pression rail) est constitu de 7 tats (g. 9.10) : 3 tats
proviennent du modle de lIMV (courant traversant la bobine, position et vitesse de la
masse mobile), 3 tats proviennent du modle de la pompe relatifs aux dirents volumes
de pompage et enn 1 tat provient du modle du rail relatif la pression du carburant.
Le modle multivariable (i.e. deux entres de commande : lIMV et lHPV et une sor-
tie : la pression rail) est constitu de 10 tats (g. 9.11). Les trois tats supplmentaires
proviennent du modle de lHPV (courant traversant la bobine, position et vitesse de la
masse mobile). Parmis les paramtres variants lun dentre eux nest pas mesurable, il
sagit de la position de lIMV. Le contrleur ne pourra donc pas prendre en compte ce
paramtre et devra de ce fait tre robuste vis--vis de ses variations.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
110 Chapitre 9. Modlisation LFT
IMV
3 tats
Pompe HP
3 tats
Rail
1 tat
Injecteurs
Pression
rail
U
imv
pulse
Q
imv
Q
ppe
Q
inj
Rgime moteur
Rgime moteur
Temprature
Pression
Fig. 9.10 modle monovariable
IMV
3 tats
Pompe HP
3 tats
Rail
1 tat
Injecteurs
Pression
rail
U
imv
pulse
Q
imv
Q
ppe
Q
inj
Q
hpv
HPV
3 tats
U
hpv
Rgime moteur Pression
Temprature
Rgime moteur
Rgime moteur
Fig. 9.11 modle multivariable
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
Troisime partie
Commandes
111
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
10
Stratgies de commande
Sommaire
10.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
10.2 Stratgie de commande monovariable . . . . . . . . . . . . 113
10.3 Ouverture de lHPV : passage en mode multivariable . . 114
10.4 Stratgie de commande multivariable (Condentiel - Del-
phi) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
10.4.1 Fermeture de lHPV : passage en mode monovariable . . . 117
10.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
10.1 Introduction
Nous prsentons dans ce chapitre la stratgie globale du contrle de la pression, en
dclinant les dirents modes qui la composent. Ces modes dnissent la structure du
contrle pour chaque tat du systme. Parmi les quatre modes, deux dnissent la struc-
ture du contrle du systme lorsque ltat du systme est stable, i.e. HPV ouverte et HPV
ferme, les deux autres sont les modes de transition qui permettent de passer dun tat
stable un autre.
10.2 Stratgie de commande monovariable
Dans ce mode de contrle, seule lIMV contrle la pression tandis que lHPV doit tre
maintenue ferme. Nous restons dans ce mode de contrle tant que les variations ngatives
du dbit de la pompe peuvent tre susantes pour faire chuter la pression rail an de
suivre la demande. Dans le cas contraire lHPV doit tre ouverte.
Le schma de contrle choisi est prsent la gure 10.1. Les deux contrleurs K
imv
prail
et
K
hpv
crt
sont respectivement le contrleur de pression sur lIMV qui doit suivre la rfrence
de pression rail P
dmnd
et le contrleur de courant de lHPV. Ce dernier doit garantir que
lHPV reste ferme.
113
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
114 Chapitre 10. Stratgies de commande
Systme dinjection
Common Rail
P
rail
I
hpv
U
imv
U
hpv
P
dmnd
P
rail
I
dmnd
I
hpv
K
imv
prail
K
hpv
crt
Fig. 10.1 Architecture de la commande monovariable
Pour respecter les contraintes de minimisation de la consommation dnergie, le cou-
rant appliqu lHPV est fonction de la pression. Nous dterminons une demande de
courant I
dmnd
fonction de la pression rail. Plus la pression est leve plus le courant doit
tre fort et vice versa. En eet, pour que lHPV soit maintenue ferme, la force lectroma-
gntique F
e
(eq. (8.6)) de lHPV doit tre suprieure la force hydraulique F
h
(eq. (8.2)).
Le contrleur K
hpv
crt
permet de garantir que le courant demand, assurant le maintien de
lHPV ferme, traverse bien lactionneur malgr dune part les variations de la rsistance
de lHPV en fonction de la temprature, et dautre part des dispersions de la rsistance
dune pice lautre.
10.3 Ouverture de lHPV : passage en mode multiva-
riable
Lutilisation de lHPV est ncessaire lorsque la baisse du dbit de la pompe nest pas
susante pour suivre la rfrence de pression.
Par exemple, dans le cas extrme o le conducteur retire brutalement le pied de lacc-
lrateur (ce que nous appelons un lcher de pied), la pression dans le rail est leve, et la
demande de pression chute brutalement, tandis que la demande dinjection devient nulle.
Dans ce cas, puisque le dbit de la pompe vis--vis du rail ne peut tre que positif, il nest
pas possible de faire chuter susamment la pression pour suivre la demande. Louverture
de lHPV est donc ncessaire pour crer un dbit ngatif.
Pour raliser louverture de lactionneur de dcharge (g. 10.2), le contrle de la pres-
sion par lIMV est maintenu et linitialisation de la commande de lHPV est eectue en
boucle ouverte. Cette valeur dinitialisation est issue dune cartographie, fonction de plu-
sieurs paramtres tels que le dbit de la pompe et la pression du carburant entre autres.
Le contrleur de pression K
hpv
prail
du mode multivariable sera initialis avec cette valeur.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
118 Chapitre 10. Stratgies de commande
10.5 Conclusion
Nous venons de prsenter lensemble des stratgies qui vont permettre de contrler la
pression, en autorisant louverture et la fermeture de lactionneur de dcharge.
Nous dnombrons trois contrleurs, K
imv
prail
contrle la pression par lIMV lorsque lHPV
est ferme, K
hpv
crt
qui contrle le courant de lHPV, et K
hpv
prail
qui contrle la pression par
lHPV.
Certains modes de fonctionnement particuliers nont pas t prsents. Nanmoins,
nous listons ici la liste exhaustive des contrleurs qui seront intgrs dans lECU pour
raliser le contrle de la pression pour le fonctionnement global du systme :
Contrleur de courant de lHPV priode dchantillonnage xe
20
: commande H
LTI temps discret,
Contrleur de courant de lHPV priode dchantillonnage variable : commande
H
LTI temps continu discrtise en ligne dans lECU,
Contrleur de pression par lIMV priode dchantillonnage variable : commande
H
LFT temps discret,
Contrleur de pression par lHPV priode dchantillonnage variable : commande
H
LTI temps continu discrtise en ligne dans lECU.
Nous utilisons au nal trois mthodes de synthse H
que nous dtaillons dans le
chapitre suivant, avec les formulations respectives et leur solution.
20
cas de fonctionnement particulier non prsent
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
11
Quelques lments sur la commande
H
Sommaire
11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
11.1.1 Principe de la commande H
. . . . . . . . . . . . . . . . 119
11.2 Synthse H
LTI . . . . . . . . . . . . . . . . . . . . . . . . 120
11.2.1 Solution du contrleur temps continu . . . . . . . . . . . 122
11.2.2 Solution du contrleur temps discret . . . . . . . . . . . . 122
11.3 Synthse H
LFT temps discret . . . . . . . . . . . . . . 123
11.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . 123
11.3.2 Ecriture du problme . . . . . . . . . . . . . . . . . . . . . 124
11.3.3 Solution du problme . . . . . . . . . . . . . . . . . . . . . 125
11.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
11.1 Introduction
11.1.1 Principe de la commande H
Nous prsentons dans cette section le principe gnral de la commande H
, pour plus
de dtails voir [30, 23, 14, 15, 31] pour obtenir la base de la commande H
ainsi quune
large introduction.
La commande H
apporte une solution (si elle existe) au problme de contrle avec
un certain nombre de contraintes. Elle permet de prendre en compte des spcications
donnes par le cahier des charges qui peut contenir quatre classes de spcications [28] :
Suivi de trajectoires de rfrence (consignes) : il sagit dtudier linuence du signal
de rfrence r(t) sur le signal derreur (t),
Rejet/attnuation de signaux de perturbation : il sagit dtudier linuence du signal
de perturbation v(t) sur le signal derreur (t),
Attnuation des bruits de mesure : il sagit dtudier linuence des signaux de bruit
w(t) sur le signal de commande u(t) et sur le signal de sortie y(t),
119
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
120 Chapitre 11. Quelques lments sur la commande H
Commande modre : il sagit dtudier linuence des signaux de rfrence r(t) et
du signal de perturbation v(t) sur le signal de commande u(t).
Bien entendu une spcication incontournable est la stabilit interne du systme en boucle
ferme.
Dans un premier temps il faut convertir les spcications exprimes dans le domaine
temporel (p.e. temps de rponse, erreur statique, etc.) vers le domaine frquentiel. Nous
dnissons alors des gabarits frquentiels, utiliss sous forme de pondrations lors de la
synthse H
.
La formulation du problme prend en compte les pondrations (i.e. les objectifs de
commande) et le modle du systme contrler.
11.2 Synthse H
LTI
Lutilisation des LMI
21
pour le contrle est trs prsente dans la littrature [27, 26, 5,
10]. Nous prsentons dans ce mmoire lapproche de rsolution par LMI telle que formule
dans [22]. Lalgorithme de Glover-Doyle [12] (approche par quation de Riccati) permet
de rsoudre par une autre approche ce problme.
Soit un systme P, temps continu ou temps discret, contrler avec comme entre
exogne w et entre de commande u contrlant la sortie q et la sortie mesure y. Soit :
_
q
y
_
= P()
_
w
u
_
(11.1)
avec qui est soit la variable s de Laplace pour le cas temps continu, soit la variable
z de la transforme en Z pour le cas temps discret. Soit la loi de commande u = K() y
et la dcomposition de P suivante :
P() =
_
P
11
() P
12
()
P
21
() P
22
()
_
(11.2)
alors le systme en boucle ferme (g. 11.1) donnant le transfert entre q et w scrit :
T
l
(P, K) = P
11
() + P
12
()K() (I P
22
()K())
1
P
21
() (11.3)
La synthse H
consiste trouver un contrleur K() tel que :
le systme en boucle ferme soit stable,
la norme H
de T
l
(P, K) soit strictement infrieure > 0
La reprsentation dtat du systme P scrit comme suit :
x = Ax + B
1
w + B
2
u
q = C
1
x + D
11
w + D
12
u
y = C
2
x + D
21
w + D
22
u
(11.4)
o les dimensions du problme sont donnes par :
A
nn
, D
11
nqnw
et D
22
nynu
21
Linear Matrix Inequality : ingalit matricielle linaire
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
11.2. Synthse H
LTI 121
P()
K()
y
u
q
w
Fig. 11.1 Schma de synthse
Nous faisons deux hypothses sur le systme P :
les paires (A, B
2
) et (A, C
2
) sont respectivement stabilisable et dtectable,
la matrice D
22
est nulle.
La reprsentation dtat du contrleur K() est la suivante :
x
c
= A
k
x
c
+ B
k
y
u = C
k
x
c
+ D
k
y
(11.5)
avec A
k
nknk
.
La fonction de transfert de la boucle ferme donne par la LFT T
l
(P, K) est la sui-
vante :
T
l
(P, K) () = D
cl
+ C
cl
(I A
cl
)
1
B
cl
avec :
A
cl
=
_
A+ B
2
D
k
C
2
B
2
C
k
B
k
C
2
A
k
_
B
cl
=
_
B
1
+ B
2
D
k
D
21
B
k
D
21
_
C
cl
=
_
C
1
+ D
12
D
k
C
2
D
12
C
k
_
D
cl
= D
11
+ D
12
D
k
D
21
(11.6)
En dnissant la matrice comme suit :
=
_
A
k
B
k
C
k
D
k
_
(11.7)
et les matrices :
A
0
=
_
A 0
0 0
_
B
0
=
_
B
1
0
_
C
0
= (C
1
, 0)
B =
_
0 B
2
I 0
_
c =
_
0 I
C
2
0
_
T
12
= (0, D
12
) T
21
=
_
0
D
21
_
(11.8)
les matrices de la boucle ferme A
cl
, B
cl
, C
cl
et D
cl
peuvent ainsi tre crites de la manire
suivante :
A
cl
= A
0
+Bc B
cl
= B
0
+BT
21
C
cl
= C
0
+T
12
c D
cl
= D
11
+T
12
T
21
(11.9)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
122 Chapitre 11. Quelques lments sur la commande H
Le problme H
rsoudre est donc le suivant :
D
cl
+ C
cl
(I A
cl
)
1
B
cl
(11.10)
Nous rappelons les solutions dans le cas temps continu et temps discret qui sont
dmontres dans [22].
11.2.1 Solution du contrleur temps continu
Etant donn un systme P(s), il existe un contrleur LTI temps continu tel que la
performance quadratique H
du systme en boucle ferme reste borne par sil existe
des matrices R et S solutions du problme doptimisation convexe suivant :
_
^
R
0
0 I
_
T
_
_
AR + RA
T
RC
T
1
B
1
C
1
R I D
11
B
T
1
D
T
11
I
_
_
_
^
R
0
0 I
_
< 0 (11.11)
_
^
S
0
0 I
_
T
_
_
A
T
S + SA SB
1
C
T
1
B
T
1
S I D
T
11
C
1
D
11
I
_
_
_
^
S
0
0 I
_
< 0 (11.12)
_
R I
I S
_
0 (11.13)
o ^
R
et ^
S
sont des bases des noyaux de [B
T
2
, D
T
12
] et [C
2
, D
21
] respectivement. Ces
trois LMI sont issues du lemme dlimination appliqu la LMI :
+Q
T
T
Q+T
T
T < 0 (11.14)
Cette dernire LMI est elle-mme obtenue aprs application du lemme rel borne sur la
LMI 11.10. Lobtention des matrices R et S permet de calculer la matrice . Il sut alors
de rsoudre la LMI 11.14 pour obtnenir la matice , i.e. le contrleur.
11.2.2 Solution du contrleur temps discret
Etant donn un systme P(z), il existe un contrleur LTI temps discret tel que la
performance quadratique H
du systme en boucle ferme reste borne par sil existe
des matrices R et S solutions du problme doptimisation convexe suivant :
_
^
R
0
0 I
_
T
_
_
ARA
T
R ARC
T
1
B
1
C
1
RA
T
I + C
1
RC
T
1
D
11
B
T
1
D
T
11
I
_
_
_
^
R
0
0 I
_
< 0 (11.15)
_
^
S
0
0 I
_
T
_
_
A
T
SAS A
T
SB
1
C
T
1
B
T
1
SA I + B
T
1
SB
1
D
T
11
C
1
D
11
I
_
_
_
^
S
0
0 I
_
< 0 (11.16)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
11.3. Synthse H
LFT temps discret 123
_
R I
I S
_
0 (11.17)
o ^
R
et ^
S
sont des bases des noyaux de [B
T
2
, D
T
12
] et [C
2
, D
21
] respectivement. Le
contrleur est obtenu de la mme manire que le pour cas temps continu.
11.3 Synthse H
LFT temps discret
11.3.1 Introduction
Lorsque nous considrons un systme dont la variation de paramtres (endognes ou
exognes) inuent sur son comportement dynamique, il faut russir soit trouver un
correcteur unique susamment robuste en stabilit et qui maintienne un niveau de per-
formance jug admissible, soit synthtiser plusieurs correcteurs dirents points de fonc-
tionnement, et ensuite appliquer une loi dinterpolation pour passer dun contrleur un
autre. Une autre possibilit est de prendre en compte, au moment de la synthse du cor-
G(z)
K(z)
q
q
c
w
c
r
y
u
controleur systme
Fig. 11.2 Schma de conrle LFT
recteur, linuence des paramtres sur le systme, an dobtenir un contrleur travaillant
sur toute la plage de fonctionnement du systme, et dont la loi dinterpolation est inh-
rente la synthse (g. 11.2). Cette approche ore donc une meilleure garantie la fois
sur la stabilit et sur les performances du systme.
Nous prsentons dans cette section la solution au problme des contrleurs para-
mtres variants par lapproche LFT [11, 29]. Nous dveloppons les rsultats des travaux
de [17] dans le cas des systmes temps discret. Une autre solution pour rsoudre le
problme des contrleurs LPV est lapproche polytopique [4, 32]. Cette approche peut
devenir trs conservative lorsque le nombre de paramtres variants augmente, ceci tant
d la taille du polytope correspondant.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
124 Chapitre 11. Quelques lments sur la commande H
11.3.2 Ecriture du problme
Soit le systme P, paramtres variants, contrler (g. 11.3) :
_
_
_
_
x
k+1
q
q
y
_
_
_
_
=
_
_
_
_
A B
B
1
B
2
C
D
1
D
2
C
1
D
1
D
11
D
12
C
2
D
2
D
21
D
22
_
_
_
_
_
_
_
_
x
k
u
_
_
_
_
(11.18)
avec x
k
na
les tats du systme, q
les sorties allant vers le bloc , q
nq
les
sorties contrler, y
ny
les sorties mesurables,
n
les entres provenant du bloc
,
n
les entres du systme et u
nu
les entres de commandes.
P(z)
K(z)
q
w
u
y
q
c
w
c
P(z)
K(z)
0
0
q
w
u y
q
c
w
c
q
w
a)
b)
P
Fig. 11.3 Mise en forme du problme
Soit le contrleur K(z) avec la reprsentation dtat suivante (g. 11.3) :
_
_
x
c
k+1
u
q
c
_
_
=
_
_
A
k
B
k1
B
k
C
k1
D
k11
D
k1
C
k
D
k1
D
k
_
_
_
_
x
c
k
y
_
_
(11.19)
on pose alors :
=
_
_
A
k
B
k1
B
k
C
k1
D
k11
D
k1
C
k
D
k1
D
k
_
_
(11.20)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
11.3. Synthse H
LFT temps discret 125
la matrice dterminer, avec x
c
k
n
k
les tats du contrleur, q
c
les sorties
du contrleur allant vers le bloc ,
c
les entres provenant du bloc . Nous
faisons ensuite un regroupement des paramtres variants (g. 11.3 b). Cette manipulation
permet disoler le contrleur K(z) dont la reprsentation est LTI. Le systme P(z) est
alors augment et devient le systme
P(z).
Le systme en boucle ferme T
cl
est dni comme suit :
T
cl
= T
l
_
P(z), K(z)
_
= D
cl
+ C
cl
(zI A
cl
)
1
B
cl
(11.21)
En dnissant q =
_
_
q
c
q
_
_
et w =
_
_
w
c
w
_
_
, alors le systme en boucle ferme peut
scrire de la manire suivante :
_
x
k+1
q
_
=
_
A+
B
2
C
2
B +
B
2
D
21
C +
D
12
C
2
D +
D
12
D
21
__
x
k
w
_
(11.22)
preuve : c.f. annexes pour le dtail des calculs permettant dobtenir le rsultat de
lquation (11.22).
11.3.3 Solution du problme
La solution repose sur le thorme suivant [17] :
Thorme : Etant donn un systme de la forme (11.18), il existe un correcteur LFT
temps discret (11.19) tel que la performance quadratique H
du systme LPV en boucle
ferme (g. 11.3) reste borne par sil existe des matrices R, S, L
3
et J
3
solutions du
problme doptimisation convexe suivant :
(
1
)
T
_
_
_
_
ARA
T
R + B
J
3
B
T
ARC
T
+ B
J
3
D
T
ARC
T
1
+ B
J
3
D
T
1
B
1
C
RA
T
+ D
J
3
B
T
RC
T
+ D
J
3
D
T
J
3
C
RC
T
1
+ D
J
3
D
T
1
D
1
C
1
RA
T
+ D
1
J
3
B
T
C
1
RC
T
+ D
1
J
3
D
T
C
1
RC
T
1
+ D
1
J
3
D
T
1
I
nq
D
11
B
T
1
D
T
1
D
T
11
I
nr
_
_
_
_
(
1
) < 0
(11.23)
avec
1
=
_
^
R
0
0 I
_
o ^
R
est une base de noyaux de [B
T
2
, D
T
2
, D
T
12
].
(
2
)
T
_
_
_
_
A
T
SAS + C
T
L
3
C
A
T
SB
+ C
T
L
3
D
A
T
SB
1
+ C
T
L
3
D
1
C
T
1
B
T
SA+ D
T
L
3
C
B
T
SB
+ D
T
L
3
D
L
3
B
T
1
SB
+ D
T
1
L
3
D
D
1
B
T
1
SA+ D
T
1
L
3
C
B
T
1
SB
+ D
T
1
L
3
D
B
T
1
SB
1
+ D
T
1
L
3
D
1
I
nr
D
T
11
C
1
D
1
D
11
I
nq
_
_
_
_
(
2
) < 0
(11.24)
avec
2
=
_
^
S
0
0 I
_
o ^
R
est une base de noyaux de [C
2
, D
2
, D
21
].
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
126 Chapitre 11. Quelques lments sur la commande H
_
R I
I S
_
> 0 (11.25)
_
L
3
I
I J
3
_
> 0 (11.26)
Il faut ensuite, pour obtenir le contrleur LFT, appliquer la mthodologie dveloppe
dans [17] qui consiste rsoudre une seconde LMI dont la solution donne la valeur de la
matrice (eq. (11.20)), i.e. les matrices de la reprsentation dtat du contrleur.
11.4 Conclusion
Nous venons de prsenter trs brivement trois mthode de synthse H
sappliquant
pour les systmes LTI ( temps continu et temps discret) et pour les systmes LPV (mis
sous forme LFT) temps discret. Pour le calcul des contrleurs LTI nous avons utilis
les routines standard fournies dans MatLab
22
. Pour le calcul du contrleur LFT temps
discret nous avons crit notre propre algorithme qui utilise une routine MatLab pour
rsoudre les LMI
23
. Les rsultats sont prsents dans le chapitre suivant en eectuant la
synthse du contrleur H
LFT pour le contrle de la pression rail par lIMV.
22
hinmi et dhinmi
23
mincx
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12
Synthse de la loi de commande
monovariable
Sommaire
12.1 Contrleur de la pression dinjection . . . . . . . . . . . . . 127
12.1.1 Normalisation du modle pour la synthse . . . . . . . . . . 127
12.1.2 Systme en boucle ouverte . . . . . . . . . . . . . . . . . . 129
12.1.3 Architecture du contrleur . . . . . . . . . . . . . . . . . . 129
12.1.4 Cahier des charges . . . . . . . . . . . . . . . . . . . . . . . 132
12.1.5 Synthse LFT H
du contrleur de pression . . . . . . . . 132
12.2 Rsultat du contrleur en boucle ouverte . . . . . . . . . . 135
12.3 Robustesse vis--vis de la position de lIMV . . . . . . . . 136
12.3.1 Analyse par le thorme du petit gain . . . . . . . . . . . . 137
12.3.2 Analyse par la marge de gain . . . . . . . . . . . . . . . . . 138
12.4 Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
12.4.1 Essai 1 : prol en "montagnes russes" . . . . . . . . . . . . 142
12.4.2 Essai 2 : prol en acclration . . . . . . . . . . . . . . . . 143
12.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
12.1 Contrleur de la pression dinjection
Nous rappelons que dans ce mode, le contrle de la pression est ralis par lIMV et
que lHPV est maintenue ferme, comme prsent sur la gure 10.1.
12.1.1 Normalisation du modle pour la synthse
Le modle LFT dvelopp est exprim dans le systme international MKSA ce qui
donne pour les coecients des valeurs trs htrognes : la force hydraulique se calcule
par le produit de la pression du carburant en Pascal ( 10
5
[Pa]) et la surface active de
la bille de lHPV ( 5 10
7
[m
2
]). Les matrices du modle sont trs mal conditionnes
127
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
128 Chapitre 12. Synthse de la loi de commande monovariable
numriquement et posent des problmes pour la rsolution des LMI lors de la synthse
H
LFT.
Nous proposons donc de normaliser le modle, cest dire dextraire lensemble des
gains statiques, que nous multiplions entre eux pour obtenir une valeur qui ne sera pas
prise en compte lors de la synthse, mais qui sera au nal rintroduite dans le contrleur
pour rester cohrent avec le systme dorigine.
Nous prsentons le principe de normalisation que nous avons employ sur le gain sta-
tique du systme rail-injecteur, dj prsent lors de la modlisation LFT. Nous rappelons
la gure 12.1 la reprsentation LFT du rail dont le modle scrit comme suit avec les
valeurs numriques :
_
_
_
_
P
k+1
q
B
q
A
y
k
_
_
_
_
=
_
_
_
_
0.89 1 1 3.53 10
7
0 0 0 3.25 10
7
0.1 0 0 0
1 0 0 0
_
_
_
_
_
_
_
_
P
k
w
A
w
B
Q
ppe
_
_
_
_
(12.1)
`
_
z
1
Q
ppe
P
k
`
_
B0
B
B
`
_
A0
q
B
w
B
w
A
q
A
Fig. 12.1 Reprsentation graphique du modle LPV du rail (rappel)
Le coecient B scrit :
B =
B0
+
B
B
(12.2)
La normalisation propose consiste rendre la valeur nominale
B0
gale 1. Pour
cela, il sut de la mettre en facteur :
B =
B0
_
1 +
B
B0
_
B = B
0
_
1 +
B
B
_
(12.3)
Il est intressant de noter que la variable
B
nest pas modie, et que sa valeur varie
toujours de 1 1. Le nouveau modle du rail ainsi obtenu saranchit du gain B
0
, et
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12.1. Contrleur de la pression dinjection 129
son modle devient :
_
_
_
_
P
k+1
q
B
q
A
y
k
_
_
_
_
=
_
_
_
_
0.89 1 1 1
0 0 0 0.92
0.1 0 0 0
1 0 0 0
_
_
_
_
_
_
_
_
P
k
w
A
w
B
Q
ppe
_
_
_
_
(12.4)
En procdant de la sorte sur lensemble des gains statiques du systme monovariable (i.e.
avec lHPV ferme), nous pouvons mettre trois gains en facteur, de valeur 1.15 10
5
,
0.167 et 3.53 10
7
, et dont le produit vaut 67.91.
Soit le gain mis en facteur et G le systme monovariable, nous avons alors G = G
0
o G
0
est le modle normalis que nous allons utiliser pour la synthse. Ainsi, le systme
en boucle ferme T
bf
obtenu lissue de la synthse du contrleur K va scrire :
T
bf
=
K G
0
1 +K G
0
(12.5)
Or, le systme sur lequel nous allons appliquer notre contrleur est G, il faut donc mul-
tiplier la sortie du contrleur par linverse de pour obtenir le comportement escompt :
T
bf
=
K (1/) G
1 +K (1/) G
=
K (1/) G
0
1 +K (1/) G
0
T
bf
=
K G
0
1 +K G
0
(12.6)
12.1.2 Systme en boucle ouverte
La gure 12.2 montre direntes rponses frquentielles du systme (lorsque lHPV est
ferme). Ces fonctions de transferts ont t calcules partir du modle LFT du systme
monovariable pour un ensemble de points de fonctionnement : variation de la pression rail,
du rgime moteur et de la temprature du carburant. Nous avons normalis la frquence
1Hz pour pouvoir facilement comparer les courbes.
12.1.3 Architecture du contrleur
Du point de vue du contrle de la pression rail, toute variation de dbit au sein du
rail, autre que celle due la commande de lIMV, est considre comme une perturbation.
Cest le cas du dbit des injecteurs, totalement indpendant du contrle de la pression.
Deux cas classiques de perturbation sont traiter, il sagit des acclrations et des
lever de pied. En eet, dans le cas des acclrations, la demande dinjection augmente
brutalement. ce moment, cette variation de dbit inject cre une somme ngative des
dbits qui va faire diminuer la pression, alors que la demande de pression augmente.
Pour le cas du lacher de pied, la pression rail et le dbit inject sont levs, et la de-
mande dinjection chute brutalement, jusqu zro. Dans ce cas, une lvation de pression
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
130 Chapitre 12. Synthse de la loi de commande monovariable
60
40
20
0
20
40
60
80
M
a
g
n
i
t
u
d
e
(
d
B
)
10
6
10
5
10
4
10
3
10
2
10
1
90
45
0
45
90
135
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (Hz)
Fig. 12.2 Rponse frquentielle du systme monovariable en boucle ouverte sur un
ensemble de points de fonctionnement
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12.1. Contrleur de la pression dinjection 131
apparat due une somme postive des dbits, alors quen mme temps la rfrence de
pression a chut.
Comme cette pertubation est due la variation de la demande dinjection et que celle-
ci est connue puisque pilote par le calculateur, nous pouvons la prendre en compte dans
le schma de synthse.
Larchitecture actuelle prend dj en compte la demande dinjection pour le contrle
de la pression avec lIMV. Il sagit en fait dun contrle en boucle ouverte (feedforward) qui
sajoute au contrle en boucle ferme. Cela permet daider le contrleur en boucle ferme
en prpositionnant lactionneur de remplissage. Nous allons donc conserver cette solution
qui amliore le contrle. Nanmoins, le contrle en boucle ouverte actuellement utilis est
statique. La valeur de la commande est calcule en fonction dune cartographie qui dpend
de certains paramtres, il ny a donc pas de comportement dynamique. Dautre part, la
calibration de cette cartographie est ralise aprs la synthse du contrleur de pression.
Nous proposons dans notre approche dtablir le contrle en boucle ouverte lors de la
synthse LFT. Le contrleur en boucle ouverte sera dni en mme temps que le contrleur
de la pression. Nous proposons alors la structure de contrle prsente la gure 12.3,
o F
dmnd
reprsente la demande dinjection, P
dmnd
la consigne de pression, K
1
est le
contrleur en boucle ferme, K
2
le contrleur en boucle ouverte, G
1
est lensemble IMV et
pompe HP, G
2
le systme rail-injecteur. La sparation du systme en deux ensembles G
1
et G
2
permet de faire apparatre lentre de dbit du rail, et ainsi de prendre en compte
le dbit inject par les injecteurs en plus de leur dbit de fuite. Le gain est le coecient
qui permet de convertir en m
3
/s la demande dinjection qui est en mg/cp, et de prendre
en compte le gain de normalisation du rail.
`
_
K
1
K
2
P
dmnd
P
rail
U
imv
G
1
`
_
G
2
`
_
F
dmnd
Systme
Contrleur
p
Fig. 12.3 Architecture du contrleur de pression en mode monovariable
Les fonctions de transfert associes cette architecture sont les suivantes :
P
rail
=
G
2
(G
1
K
2
)
1 +G
2
G
1
K
1
F
dmnd
+
G
2
G
1
K
1
1 +G
2
G
1
K
1
P
dmnd
(12.7)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
132 Chapitre 12. Synthse de la loi de commande monovariable
12.1.4 Cahier des charges
Les performances requises du contrle de la pression sont les suivantes :
erreur statique de 5 bar en dessous de 500 bar, puis 1% de la demande de
pression au-del,
erreur de tranage nulle.
Pour traiter lerreur statique, nous imposons un gain statique de la fonction de transfert
entre la rfrence et lerreur de rgulation (i.e. la fonction de sensibilit) infrieur 1%,
soit infrieur 40dB. Pour pouvoir suivre une demande de type rampe, il faut que la
fonction de sensibilit ait une pente de +40dB/dec.
Pour tout systme mcanique ayant des parties mobiles les unes par rapport aux
autres des frottements sont prsents. Cest le cas de lIMV lorsque ses parties mobiles
se dplacent pour laisser passer plus ou moins de carburant. Le frottement, fortement
non-linaire et asymtrique, est un phnomne complexe modliser. Plusieurs modles
(statiques et dynamiques) sont proposs dans la littrature [18, 16]. La grande dicult
associ ces modles concerne lestimation de leurs paramtres. Dans notre cas cette
tche est trs dicile car en plus des dispersions mcaniques (p.e. variation des cotes,
tats des surfaces des pices, etc.), lIMV est immerge dans le carburant qui va gnrer
encore des dispersions. En dautre termes, le frottement de lIMV dun vhicule un
autre risque fortement dtre trs dirent. Un frottement bien particulier est leet de
coll-gliss ou stick-slip [18, 24, 25]. Ce phnomne se produit lorsque les masses mobiles
arrtent de se dplacer. Pour pouvoir les remettre en dplacement, il faut apporter une
commande plus forte que si celles-ci taient restes mobiles. Un inconvnient est que le
dplacement est alors saccad et quil est dicile de contrler correctement la position
prcise de lactionneur. Ce phnomne cre des hystrsis et un temps de rponse plus
long. Face ce constat, nous avons opt pour la compensation dite Dither, mthode simple
qui consiste introduire une vibration haute frquence an de ne jamais se trouver en
position de collage. Pour raliser cette excitation, nous utilisons directement la commande
de lIMV issue du contrleur. Nous garantirons ainsi que lexcitation ne rendra pas instable
le systme. Pour obtenir ce rsultat, nous allons permettre la fonction de transfert
K
1
S, cest--dire leet de la rfrence sur la commande, davoir un gain lev en hautes
frquences, ce qui assurera davoir une commande bruite.
12.1.5 Synthse LFT H
du contrleur de pression
Lobjectif du contrle de la pression est rsum dans la gure 12.4. Nous devons syn-
thtiser un contrleur prenant en compte les paramtres variants an datteindre les ob-
jectifs de performance demands, tout en tant robuste la variation dautres paramtres
ne pouvant tre pris en compte par le contrleur.
Pour rsoudre le problme prsent la gure 12.4, nous utilisons les rsultats obtenus
dans le chapitre prcdent sur la synthse H
LFT. Les aspects de robustesse seront
analyss a posteriori une fois le contrleur obtenu. Si celui-ci ne satisfait pas les conditions
de robustesse vis--vis de la variation de la position de lIMV x
imv
, il faudra prendre en
compte cette contrainte dans une nouvelle synthse.
Nous considrons comme sorties contrler lerreur de pression, qui sert imposer
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12.1. Contrleur de la pression dinjection 133
K(s)
W
u
W
1
U
imv
F
dmnd
P
dmnd
e
2
e
1
P(s)
p
U
imv
_
p
F
dmnd
_
3
robustesse
contrleur LFT
performance
Fig. 12.4 Reprsentation du problme de synthse LFT robuste
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
134 Chapitre 12. Synthse de la loi de commande monovariable
lensemble des contraintes spcies, et la commande U
imv
de manire contrler les
bruits en hautes frquences pouvant apparatre lissue de la synthse.
Daprs les gure 12.3 et 12.4, le problme H
pour le systme boucl est le suivant :
_
e
1
e
2
_
=
_
W
1
S W
1
S ( G
1
K
2
)
W
u
S K
1
W
u
S (K
2
+ K
1
G
2
)
__
P
dmnd
F
dmnd
_
(12.8)
avec S la fonction de sensibilit (S = (1 +K
1
G
1
G
2
)
1
), soit :
_
W
1
S W
1
S ( G
1
K
2
)
W
u
S K
1
W
u
S (K
2
+ K
1
G
2
)
_
(12.9)
12.9 implique alors les quatre ingalits suivantes :
_
_
[[S[[
W
1
[[S ( G
1
K
2
)[[
W
1
[[S K
1
[[
Wu
[[S (K
2
+ K
1
G
2
)[[
Wu
(12.10)
Les rsultats obtenus pour cette synthse sont reprsents sur la gure 12.6. La -
gure 12.5 montre les contrleurs agissant en boucle ferme sur lerreur de pression (K
1
)
et en boucle ouverte sur la demande dinjection (K
2
).
10
4
10
3
10
2
10
1
10
0
10
1
20
0
20
40
60
M
a
g
n
it
u
d
e
(
d
B
)
Bode Diagram
Frequency (rad/sec)
10
3
10
2
10
1
10
0
10
1
10
0
10
20
30
40
M
a
g
n
it
u
d
e
(
d
B
)
Bode Diagram
Frequency (rad/sec)
F
L
(K
1
(s), )
F
L
(K
2
(s), )
Fig. 12.5 Rponse frquentielle du contrleur en fonction du point de fonctionnement
Le rsultat est remarquable, car comme pour le systme (c.f. g. 12.2), le contrleur
obtenu varie fortement en fonction du point de fonctionnement ce qui permet au nal
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12.2. Rsultat du contrleur en boucle ouverte 135
davoir des fonctions de sensibilit S identiques quel que soit le point de fonctionnement
(g. 12.6), et de mme pour la fonction de sensibilit sur le rejet de perturbation de dbit
dans le rail S ( G
1
K
2
).
Les fonctions de transfert reprsentant SK
1
ont un gain qui augmente en hautes fr-
quences. Il en est de mme pour les fonctions de transfert S (K
2
+ K
1
G
1
). Nous aurons
donc une commande bruite ce qui empchera lIMV de se coller. Le rsultat de la com-
mande de lIMV obtenue sur vhicule est prsent dans le chapitre suivant.
10
4
10
2
10
0
100
80
60
40
20
0
20
M
a
g
n
i
t
u
d
e
(
d
B
)
Bode Diagram
Frequency (rad/sec)
10
4
10
2
10
0
100
80
60
40
20
0
20
M
a
g
n
i
t
u
d
e
(
d
B
)
Bode Diagram
Frequency (rad/sec)
10
4
10
2
10
0
100
50
0
50
M
a
g
n
i
t
u
d
e
(
d
B
)
Bode Diagram
Frequency (rad/sec)
10
4
10
2
10
0
20
10
0
10
20
30
40
M
a
g
n
i
t
u
d
e
(
d
B
)
Bode Diagram
Frequency (rad/sec)
S S.( G
1
. K
2
)
S.K
1
S.(K
2
+ K
1
.G
1
)
Fig. 12.6 Norme H
obtenue = 1.23
12.2 Rsultat du contrleur en boucle ouverte
Nous allons analyser le rsultat obtenu pour le contrleur en boucle ouverte de la
demande dinjection. La rponse de lentre de commande U
imv
un chelon unitaire du
dbit dinjection est prsente la gure 12.7. Il est intressant danalyser le comportement
de la commande obtenue. En eet, nous constatons que face une variation positive de
linjection (i.e. une augmentation de la consommation des injecteurs) la commande de
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
136 Chapitre 12. Synthse de la loi de commande monovariable
0 1 2 3 4 5 6 7 8
1.2
1
0.8
0.6
0.4
0.2
0
Echantillons
T
e
n
s
i
o
n
[
V
]
Fig. 12.7 Rponse indicielle du contrleur en boucle ouverte sur la demande dinjection
lIMV diminue trs fortement (pour augmenter le dbit de la pompe) au tout dbut pour
ensuite rapidement rejoindre une valeur dquilibre. Il y a presque un rapport de deux
entre la valeur extrme et la valeur dquilibre.
Ainsi, Lorsque la demande dinjection varie, leet est immdiat sur le dbit. Le dbit
de la pompe, quant lui, varie selon un certain temps de rponse lorsque la commande
de lIMV est modie. Il est donc invitable davoir une perturbation sur la pression rail
lorsque le dbit inject varie. Si la commande en boucle ouverte est statique et que sa
valeur est telle que la variation du dbit de la pompe compense la variation du dbit des
injecteurs en rgime tabli, alors la perturbation sur la pression rail sera importante et
cest le contrleur en boucle ferm qui devra la rejeter. Cest le fonctionnement actuel
obtenu avec la cartographie. En revanche, grce la prise en compte du comportement
dynamique (g. 12.7), la forte variation initiale de la commande de lIMV permet non
seulement de compenser la variation du dbit inject mais galement la perturbation de
pression. Le contrleur en boucle ferm est alors moins sollicit et surtout le rejet de la
perturbation est plus rapide.
12.3 Robustesse vis--vis de la position de lIMV
La synthse du contrleur LFT ne tient pas compte de la position x
imv
de lIMV
comme paramtre variant, car cette variable nest pas lue par lECU et ne peut pas tre
utilise par le contrleur. Toutefois elle inue sur le comportement dynamique du systme.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12.3. Robustesse vis--vis de la position de lIMV 137
La robustesse en stabilit du systme doit donc tre analyse a posteriori quels que soient
la position de lIMV et le point de fonctionnement du moteur. Les paramtres considrs
sont les suivants :
1
et
2
reprsentent la variation du gain statique et de la dynamique du circuit
lectrique de lIMV (eq. 4.3) en fonction de la priode dchantillonnage,
3
reprsente la variation du gain hydraulique de lIMV (eq. 4.14 et g. 4.10),
4
et
5
sont respectivement gaux
B
et
A
(eq. 9.23).
12.3.1 Analyse par le thorme du petit gain
Le gain de la variation du dbit de lIMV en fonction de la position x
imv
a t normalis
selon la formule :
Q
imv
x
imv
=
30
_
1 +
3
30
_
(12.11)
La valeur
30
a t retire du modle pour la synthse. Le contrleur est donc obtenu en
prenant la valeur nominale du gain ici unitaire. Nous devons maintenant tudier leet
de la variation de
3
sur la stabilit du systme. Pour faire cette analyse, nous sparons
lensemble du systme par rapport la variable
3
comme reprsent sur la gure 12.8 et
nous utilisons le thorme du petit gain, qui va nous permettre de dire si linterconnection
entre les deux systmes est stable.
`
_
3
3
K G
F
dmnd
P
dmnd
P
rail
3
q
3
w
3
P
q
3
w
3
F
dmnd
P
dmnd
P
rail
Fig. 12.8 Mise en forme du systme pour lanalyse de la stabilit par le thorme du
petit gain
Nous rappelons ici la formulation de ce thorme selon [31]
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
138 Chapitre 12. Synthse de la loi de commande monovariable
Thorme : avec M H
et > 0, le systme interconnect reprsent dans la
gure 12.9 est bien pos et stable pour tout (s) H
tel que :
||
1/ si et seulement si |M(s)|
<
||
< 1/ si et seulement si |M(s)|
_
_
Fig. 12.9 Analyse de stabilit de linterconnection M-
La condition du thorme devient insusante lorsquelle concerne un type particulier
dincertitudes. Ainsi, si la condition de stabilit nest pas vrie dans le cadre de la
gure 12.8, nous ne pouvons pas conclure, car il sagit dune condition susante mais pas
ncessaire.
Dans notre cas, le systme P de la gure 12.8 est dni comme suit :
_
q
3
P
rail
_
=
_
P
11
P
12
P
13
P
21
P
22
P
23
_
_
_
w
3
F
dmnd
P
dmnd
_
_
(12.12)
Lapplication du thorme du petit gain ncessite le calcul du transfert entre w
3
et q
3
,
dni par P
11
. A partir des schmas de la gure 12.3 et 12.8, P
11
scrit :
P
11
=
3
S K
1
G
2
G
1
(12.13)
Le thorme du petit gain assure que le systme est stable malgr les variations de
3
si :
|P
11
|
< 1 car |
3
| 1 par dnition (12.14)
Nous avons trac P
11
(z) pour un ensemble de points de fonctionnement (gure 12.10).
Les dirents transferts de P
11
dpassent la valeur limite xe par le thorme du petit
gain. Nous ne pouvons donc pas conclure sur la stabilit robuste du systme. Or, il est
impratif de savoir quelle est la robustesse du systme par rapport la position x
imv
de
faon assurer la stabilit robuste de la pression. Il faut donc utiliser une autre technique
danalyse pour pouvoir conclure.
12.3.2 Analyse par la marge de gain
Dans un premier temps, sont calcules les marges de gain du systme pour lensemble
des points de fonctionnement en supposant le gain de la variation de dbit de lIMV
nominal et gal 1 .
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12.3. Robustesse vis--vis de la position de lIMV 139
10
2
10
1
10
0
50
40
30
20
10
0
M
a
g
n
i
t
u
d
e
(
d
B
)
Bode Diagram
Frequency (rad/sec)
Fig. 12.10 Analyse de la robustesse vis--vis de la position x
imv
par le thorme du
petit gain
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
140 Chapitre 12. Synthse de la loi de commande monovariable
Il sagit donc de calculer la marge de gain du systme en boucle ouverte suivante :
L(z) = G
2
(z) G
1
(z) K
1
(z) (12.15)
La gure 12.11 montre les direntes marges de gain obtenues en fonction des points
de fonctionnement.
0 100 200 300 400 500 600 700
4
4.5
5
5.5
Point de fonctionnement
M
a
r
g
e
d
e
g
a
i
n
d
u
s
y
s
t
m
e
Fig. 12.11 Marge de gain du systme (min = 4.11)
La marge de gain minimale atteinte sur lensemble des points de fonctionnement est
de 4.11. Or, le gain maximal (i.e. pour
3
= 1), d lincertitude vis--vis de la variation
de la position de lIMV, est de 1.97. Le systme reste donc stable malgr les variations
de position de lIMV et la marge de gain est dans le pire des cas de 4.11/1.97 = 2.08 soit
6.3dB.
La gure 12.12 montre les marges de gains et de phases dans le pire des cas. Nous
garantissons une bonne marge de robustesse vis--vis dautres variations paramtriques.
Nanmoins, si cela ntait pas susant au vue des ventuelles variations paramtriques
des lments du systme (p.e. vieillissement des injecteurs, etc.), nous pouvons rduire
le gain sur la commande lors de la synthse H
, ce qui saccompagne dune perte de
performance. Il y a un compromis entre la robustesse et la performance : il faut avoir le
systme le plus performant tout en garantissant la stabilit du systme tout au long de
son fonctionnement.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12.3. Robustesse vis--vis de la position de lIMV 141
Nichols Chart
OpenLoop Phase (deg)
O
p
e
n
L
o
o
p
G
a
i
n
(
d
B
)
180 150 120
5
0
5
10
15
20
6 dB
3 dB
1 dB
Fig. 12.12 Marge de gain et de phase dans le pire des cas i.e.
3
= 1
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
142 Chapitre 12. Synthse de la loi de commande monovariable
12.4 Simulations
Nous utilisons des donnes relles acquises sur vhicule pour raliser les simulations
dont les rsultats sont prsents dans la partie mise en oeuvre. Ceci permet davoir des
volutions relles des demandes dinjection, de pression et du rgime moteur, et aussi de
pouvoir comparer les rsultats entre la thorie et la pratique.
12.4.1 Essai 1 : prol en "montagnes russes"
La gure 12.13 montre le suivi de la pression de consigne (trac suprieur) face des
sries de rampes montantes et descendantes, avec des cassures nettes. Ceci a pour eet
de provoquer des variations brutales sur la demande dinjection, permettant de voir les
capacits de rejet de perturbation de dbit des injecteurs tout en rgulant la pression
rail. Les variations de la demande dinjection et du rgime moteur sont prsentes dans
la partie mise en oeuvre.
25 30 35 40 45 50 55
300
350
400
450
500
550
600
650
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
25 30 35 40 45 50 55
60
40
20
0
20
40
60
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Demande
Pression rail
Fig. 12.13 Simulation du contrle de la pression par lIMV seule
Nous constatons que le cahier des charges est bien respect (sur le plan thorique),
car les erreurs de pression ne dpassent jamais les 50 bar en transitoire et que lerreur
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
12.5. Conclusion 143
statique est infrieure la tolrance demande. Dautre part lerreur de trainage lors des
direntes rampes est quasi-nulle.
12.4.2 Essai 2 : prol en acclration
Nous proposons une seconde simulation montrant le suivi dune rfrence de pression
de type parabolique obtenue lors dune acclration. Pour cet essai, lerreur de trainage
est infrieure 20 bar, le dpassement faible et lerreur de transitoire infrieure 50
bar. Le cahier des charges est donc bien respect.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
300
400
500
600
700
800
900
1000
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
60
40
20
0
20
40
60
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Demande
Pression rail
Fig. 12.14 Suivi du rampe par lIMV seul
12.5 Conclusion
Nous avons prsent les rsultats thoriques de la synthse H
LFT sur le contrle
de la pression rail. Lanalyse de la robustesse montre que le systme en boucle ferme est
robuste vis--vis des variations de la position de lIMV et prsente dans le pire des cas une
marge de robustesse confortable. Il serait intressant dajuster au mieux la robustesse du
contrleur an dobtenir les performances optimales du systme. Pour cela il faudrait faire
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
144 Chapitre 12. Synthse de la loi de commande monovariable
une tude sur le vieillissemement des lments du systme (i.e. lIMV, les injecteurs, etc.)
pour analyser leurs variations de comportement dans le temps. Cest une tche longue et
dicile qui ne peut pas tre exhaustive. Il faudra donc toujours garantir une marge de
robustesse de scurit par rapport au pire des cas estim sur le comportement dynamique
du systme.
Nous avons prsent deux simulations dont les rsultats satisfont les exigences du
cahier des charges. Ces donnes en simulation peuvent tre compares avec les essais
vhicules qui sont prsents dans la partie mise en oeuvre.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
Quatrime partie
Mise en oeuvre
145
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
13
Calibration de la stratgie actuelle
partir du modle thorique
Sommaire
13.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
13.2 Comparaisons et validations . . . . . . . . . . . . . . . . . . 149
13.2.1 cas 1 : 750 tr/min, 5 mg/cp, 230 bar . . . . . . . . . . . . . 149
13.2.2 cas 2 : 750 tr/min, 20 mg/cp, 275 bar . . . . . . . . . . . . 152
13.2.3 cas 3 : 750 tr/min, 70 mg/cp, 680 bar . . . . . . . . . . . . 152
13.2.4 cas 4 : 1000 tr/min, 5 mg/cp, 279 bar . . . . . . . . . . . . 155
13.2.5 cas 5 : 1000 tr/min, 20 mg/cp, 365 bar . . . . . . . . . . . 155
13.2.6 cas 6 : 1000 tr/min, 70 mg/cp, 930 bar . . . . . . . . . . . 155
13.2.7 cas 7 : 2000 tr/min, 5 mg/cp, 560 bar . . . . . . . . . . . . 158
13.2.8 cas 8 : 2000 tr/min, 20 mg/cp, 600 bar . . . . . . . . . . . 158
13.2.9 cas 9 : 2000 tr/min, 70 mg/cp, 1400 bar . . . . . . . . . . . 158
13.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
13.1 Introduction
Dans ce chapitre, nous mettons en oeuvre la premire proposition damlioration pr-
sente dans le chapitre 3 de la premire partie. Il sagit dutiliser le modle de connaissance
prcdemment dvelopp (au lieu du modle identi) pour raliser la calibration des gains
du PID. Lalgorithme de synthse du contrleur ainsi que la stratgie de contrle sont in-
changs. Cette mise en oeuvre nimplique aucune modication de la stratgie actuelle.
Nous intervenons uniquement pendant ltape de la dtermination du modle.
La gure 13.1 rsume les deux principes de calibration des gains du PID : identication
du systme puis synthse du contrleur (mthode actuelle) et modlisation thorique du
systme puis synthse du contrleur (mthode propose).
La synthse des contrleurs PID partir du modle thorique fournira, aprs essais,
une validation indirecte du modle. A posteriori nous pourrons conclure aussi sur la
147
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
148 Chapitre 13. Calibration de la stratgie actuelle partir du modle thorique
Systme
SBPA
u
y
Identication
modle linaire
modle
linaire
caractristiques
systme
identi
linaris
tangent
point de
fonctionnement
modle linaire
thorique
non
Synthse Synthse
gains PID obtenus gains PID obtenus
point de fonctionnement
par identication du systme par modlisation du systme
PID PID
Fig. 13.1 Calibration des gains par identication du systme et par modlisation
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
13.2. Comparaisons et validations 149
validit du modle travers les essais en boucle ferme (par comparaison de la simulation
et des tests exprimentaux).
Un autre avantage de notre approche est que nous ne sommes pas pnaliss par len-
vironnement des essais rels. En eet, le systme Common Rail est sujet des bruits
cycliques dus la rotation du moteur et la rptition des mmes vnements dun tour
moteur lautre. Ce bruit nest donc pas blanc, (bien que considr comme tel dans les
identications linaires [19]), mais dni par une frquence bien prcise. Suivant lampli-
tude de ce bruit, les modles obtenus par identication prsentent une rsonance plus ou
moins leve la frquence du bruit, ce qui nest en ralit pas le cas.
Nous prsentons les rsultats du contrle de la pression dans le mode monovariable,
i.e. lHPV est ferme et seule lIMV contrle la pression. Lensemble des essais que nous
prsentons ont t raliss sur un banc lectrique sur lequel la pompe HP est entrane
par un moteur lectrique (linjection na donc pas deet sur le rgime moteur). Ce moyen
dessai ne comporte que le systme Common Rail (i.e. lIMV, la pompe HP, le rail, les
injecteurs et lHPV), ce qui permet en cas dun mauvais contrle de la pression rail davoir
un impact limit sur le systme, contrairement la ralisation dessais sur vhicule.
13.2 Comparaisons et validations
Nous avons considr neuf points de fonctionnement correspondant trois vitesses
de rotation (750, 1000 et 2000 tr/min), trois dbits injects (5, 20 et 70 mg/cp) et neuf
pressions rail (g. 13.2). Les valeurs des pressions rail sont donnes dans le tableau suivant
en fonction du dbit et du rgime moteur.
5 20 70
750 230 275 680
1000 279 365 930
2000 560 600 1400
Fig. 13.2 Tableau des points de fonctionnement rgime/charge
Pour chacun de ces points de fonctionnement, nous prsentons le modle identi et le
modle thorique. La synthse des gains du contrleur est eectue pour les deux modles.
Trois types de rsultats sont donns : les simulations en boucle ferme du modle identi
et du modle thorique avec leur contrleur respectif, et un essai en boucle ferme sur
banc dessais avec les gains du contrleur PID obtenus par le modle thorique.
13.2.1 cas 1 : 750 tr/min, 5 mg/cp, 230 bar
La gure 13.3 montre le modle linaire au point de fonctionnement dni, issu du mo-
dle thorique non-linaire, et le modle linaire obtenu par identication. Nous constatons
une dirence importante entre les deux modles. Cet cart est d au fait que le point
de fonctionnement du systme positionne lIMV trs prs de sa fermeture, et donc de
sa saturation. De ce fait, lexcitation par les SBPA lors de lidentication provoque un
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
150 Chapitre 13. Calibration de la stratgie actuelle partir du modle thorique
100
50
0
50
M
a
g
n
it
u
d
e
(
d
B
)
10
3
10
2
10
1
10
0
10
1
10
2
270
180
90
0
90
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (rad/sec)
Modle
Identifi
Fig. 13.3 cas 1 : modle identi et modle thorique
comportement non-linaire du systme. Ceci est mis en vidence sur la gure 13.4, o le
comportement du systme en boucle ferme, vis--vis dun crneau de consigne de pres-
sion, dire selon la variation de rfrence de la pression. Lidentication de type linaire
ne peut, face ce problme, trouver le bon comportement du systme autour de ce point
de fonctionnement. Une possibilit pour pallier ce problme est de rduire lamplitude de
la SBPA pour ne pas mettre le systme en saturation, mais le rapport signal sur bruit
devient alors trop faible ce qui nuit la procdure didentication. Le modle thorique,
quant lui, nest pas perturb par le problme de la saturation du systme.
Comme nous le voyons sur la gure 13.5, la simulation du modle thorique approche
assez bien le rsultat de lessai lors dune monte de pression, hormis un dpassement non
reproduit. En revanche, pour une chute de pression, le systme entre en saturation pour
les raisons prcdentes, et le comportement du systme devient non-linaire. La chute de
la pression est donc due uniquement aux dbits des injecteurs puisque lIMV est ferme.
La simulation du modle identi ne correspond pas au rsultat de lessai, ni sur une
monte de pression, ni sur une chute de rfrence de pression. Nous pouvons donc en
dduire que le modle identi nest pas reprsentatif du comportement du systme. Le
modle thorique apporte un meilleur rsultat sur la calibration de ce point de fonction-
nement.
An de solliciter le systme dans une plage de fonctionnement linaire, nous diminuons
lamplitude du crneaux de pression. Les rsultats prsents la gure 13.5 montrent que
la simulation avec le modle thorique reproduit trs bien le comportement du systme,
ce qui nest pas le cas du modle identi.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
13.2. Comparaisons et validations 151
39 40 41 42 43 44 45 46
160
180
200
220
240
260
280
300
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
39 40 41 42 43 44 45 46
900
950
1000
1050
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.4 cas 1 : simulations et essai en boucle ferme
64 65 66 67 68 69 70
210
220
230
240
250
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
64 65 66 67 68 69 70
940
950
960
970
980
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.5 cas 1 : simulations et essais en boucle ferme, faible variation de la rfrence
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
152 Chapitre 13. Calibration de la stratgie actuelle partir du modle thorique
13.2.2 cas 2 : 750 tr/min, 20 mg/cp, 275 bar
100
50
0
50
M
a
g
n
it
u
d
e
(
d
B
)
10
3
10
2
10
1
10
0
10
1
10
2
360
270
180
90
0
90
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (rad/sec)
Modle
Identifi
Fig. 13.6 cas 2 : modle identi et modle thorique
Les modles identi et thorique sont cette fois-ci, beaucoup plus proches (g. 13.6).
La comparaison avec le rsultat de lessai en boucle ferme (gure 13.8) est correct pour
une monte de pression, hormis le dpassement. Pour une chute de pression, le systme
entre encore en saturation, mais la chute de pression est plus rapide que pour le point
de fonctionnement prcdent. Ceci sexplique simplement par le fait que le dbit des
injecteurs est plus grand. De la mme manire que prcdemment, nous prsentons les
rsultats pour des amplitudes de la consigne de pression plus faible (gure 13.8). Les
rsultats de simulation reproduisent correctement le comportement du systme dans les
deux cas.
13.2.3 cas 3 : 750 tr/min, 70 mg/cp, 680 bar
Les modles identi et thorique prsentent un cart de gain en basses frquences
(g. 13.9). En revanche en hautes frquences (i.e. > 1 rad/s), lerreur entre les deux
modles devient trs faible. Les comparaisons en boucle ferme (g. 13.10) montrent un
trs bon rsultat. Dans cet essai, le dbit inject est fort (70mg/cp), lIMV est donc plus
ouverte et loigne de la saturation. Le comportement de la pression rail est donc similaire
quelle que soit la variation de la rfrence de pression.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
13.2. Comparaisons et validations 153
48 49 50 51 52 53 54
200
250
300
350
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
48 49 50 51 52 53 54
850
900
950
1000
1050
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.7 cas 2 : simulations et essais en boucle ferme
38.5 39 39.5 40 40.5 41 41.5 42 42.5 43 43.5 44
260
270
280
290
300
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
38.5 39 39.5 40 40.5 41 41.5 42 42.5 43 43.5 44
910
920
930
940
950
960
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Fig. 13.8 cas 2 : simulations et essais en boucle ferme, faible variation de la rfrence
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
154 Chapitre 13. Calibration de la stratgie actuelle partir du modle thorique
40
20
0
20
40
60
M
a
g
n
it
u
d
e
(
d
B
)
10
3
10
2
10
1
10
0
10
1
10
2
360
270
180
90
0
90
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (rad/sec)
Thorique
Identifi
Fig. 13.9 cas 3 : modle identi et modle thorique
53.5 54 54.5 55 55.5 56 56.5 57 57.5 58 58.5 59
600
650
700
750
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
53.5 54 54.5 55 55.5 56 56.5 57 57.5 58 58.5 59
850
860
870
880
890
900
910
920
930
940
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.10 cas 3 : simulations et essais en boucle ferme
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
13.2. Comparaisons et validations 155
13.2.4 cas 4 : 1000 tr/min, 5 mg/cp, 279 bar
Pour ce point de fonctionnement, lIMV est proche de la saturation, mais moins que
pour le tout premier point de fonctionnement, car dans ce cas la pression est plus leve
(les fuites des injecteurs et de la pompe sont donc plus leves). Le modle thorique
ore un meilleur modle (g. 13.11) du fait que lIMV est faiblement ouverte, et donc une
meilleure calibration (g. 13.12) pour ce point de fonctionnement.
50
0
50
M
a
g
n
it
u
d
e
(
d
B
)
10
3
10
2
10
1
10
0
10
1
270
180
90
0
90
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (Hz)
Thorique
Identifi
Fig. 13.11 cas 4 : modle identi et modle thorique
13.2.5 cas 5 : 1000 tr/min, 20 mg/cp, 365 bar
Le dbit inject et la pression rail sont plus levs. LIMV natteint plus la zone de
saturation o elle se ferme. Les modles thorique et identi sont donc trs proches
(g. 13.13) avec des comportements similaires en simulation (g. 13.14). La calibration
obtenue avec le modle thorique donne un bon rsultat.
13.2.6 cas 6 : 1000 tr/min, 70 mg/cp, 930 bar
De la mme manire que le cas 3, nous constatons une erreur importante (> 10 dB)
entre les deux modles en basses frquences puis une erreur faible en hautes frquences
(g. 13.15) Le comportement du systme en boucle ferme donne un bon rsultat par
rapport la prdiction obtenue en simulation via le modle thorique (g. 13.16).
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
156 Chapitre 13. Calibration de la stratgie actuelle partir du modle thorique
46 47 48 49 50 51 52 53 54
200
250
300
350
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
46 47 48 49 50 51 52 53 54
850
900
950
1000
1050
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.12 cas 4 : simulations et essais en boucle ferme
100
50
0
50
M
a
g
n
it
u
d
e
(
d
B
)
10
3
10
2
10
1
10
0
10
1
450
360
270
180
90
0
90
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (Hz)
Thorique
Identifi
Fig. 13.13 cas 5 : modle identi et modle thorique
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
13.2. Comparaisons et validations 157
36 36.5 37 37.5 38 38.5 39 39.5 40 40.5 41
300
350
400
450
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
36 36.5 37 37.5 38 38.5 39 39.5 40 40.5 41
850
900
950
1000
1050
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.14 cas 5 : simulations et essais en boucle ferme
50
0
50
M
a
g
n
it
u
d
e
(
d
B
)
10
3
10
2
10
1
10
0
10
1
450
360
270
180
90
0
90
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (Hz)
Thorique
Identifi
Fig. 13.15 cas 6 : modle identi et modle thorique
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
158 Chapitre 13. Calibration de la stratgie actuelle partir du modle thorique
58 58.5 59 59.5 60 60.5 61 61.5 62
850
900
950
1000
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
58 58.5 59 59.5 60 60.5 61 61.5 62
820
840
860
880
900
920
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.16 cas 6 : simulations et essais en boucle ferme
13.2.7 cas 7 : 2000 tr/min, 5 mg/cp, 560 bar
Les modles thorique et identi ont le mme comportement dynamique (c.f. courbe
de phase gure 13.17), avec uniquement un cart de gain de 3dB sur lensemble des
frquences. Le comportement en boucle ferme du systme est non-linaire, avec un d-
passement lorsque la consigne de pression augmente (g. 13.18). Le rsultat obtenu sur
le banc dessai est satisfaisant car lerreur de pression nexcde pas les 50 bar lors du
dpassement.
13.2.8 cas 8 : 2000 tr/min, 20 mg/cp, 600 bar
Comme pour le cas 7, les phases des deux modles (identi et thorique) sont simi-
laires (g. 13.19 trac infrieur), avec lerreur du gain entre les deux modles infrieure 3
dB (g. 13.19 trac suprieur) sauf trs hautes frquences (i.e. proche de F
e
/2). Hormis
un dpassement qui reste toutefois infrieur 50 bar, le comportement de la pression rail
sur le banc dessai donne un rsultat proche de la simulation des deux modles.
13.2.9 cas 9 : 2000 tr/min, 70 mg/cp, 1400 bar
Ce point de fonctionnement prsente encore la particularit que les deux modles dif-
frent en basses frquences pour ensuite correspondre parfaitement en hautes frquences
(g. 13.21). La simulation du modle thorique en boucle ferme reproduit bien le com-
portement de la pression obtenue sur le banc dessai, hormis un dpassement plus faible
(g. 13.22).
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
13.2. Comparaisons et validations 159
10
3
10
2
10
1
10
0
10
1
540
360
180
0
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (Hz)
50
0
50
M
a
g
n
it
u
d
e
(
d
B
)
Thorique
Identifi
Fig. 13.17 cas 7 : modle identi et modle thorique, cart de 3dB
25.5 26 26.5 27 27.5 28
500
550
600
650
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
25.5 26 26.5 27 27.5 28
800
850
900
950
1000
1050
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.18 cas 7 : simulations et essais en boucle ferme
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
160 Chapitre 13. Calibration de la stratgie actuelle partir du modle thorique
50
0
50
M
a
g
n
it
u
d
e
(
d
B
)
10
3
10
2
10
1
10
0
10
1
360
270
180
90
0
90
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (Hz)
Thorique
Identifi
Fig. 13.19 cas 8 : modle identi et modle thorique, cart infrieur 3dB
28.4 28.6 28.8 29 29.2 29.4 29.6 29.8 30 30.2 30.4
550
600
650
700
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
28.4 28.6 28.8 29 29.2 29.4 29.6 29.8 30 30.2 30.4
800
850
900
950
1000
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.20 cas 8 : simulations et essais en boucle ferme
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
13.2. Comparaisons et validations 161
50
0
50
M
a
g
n
it
u
d
e
(
d
B
)
10
3
10
2
10
1
10
0
10
1
360
270
180
90
0
90
180
P
h
a
s
e
(
d
e
g
)
Bode Diagram
Frequency (Hz)
Thorique
Identifi
Fig. 13.21 cas 9 : modle identi et modle thorique
23.6 23.8 24 24.2 24.4 24.6 24.8 25 25.2 25.4 25.6
1300
1350
1400
1450
1500
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
23.6 23.8 24 24.2 24.4 24.6 24.8 25 25.2 25.4 25.6
700
750
800
850
900
Temps [s]
C
o
u
r
a
n
t
[
m
A
]
Demande
Essai
Simu modle thorique
Simu modle identifi
Fig. 13.22 cas 9 : simulations et essais en boucle ferme
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
162 Chapitre 13. Calibration de la stratgie actuelle partir du modle thorique
13.3 Conclusion
Nous venons de prsenter les rsultats (simulations et test sur banc dessais) du contr-
leur de pression par lIMV seule (HPV ferme) avec lutilisation du modle de connaissance
pour dnir la calibration des gains du PID. Les essais ont t raliss dirents points
de fonctionnement du moteur. Nous avons compar le modle thorique obtenu pour ces
dirents points de fonctionnement avec le modle identi. En analysant la fois les
comparaisons des modles et les rsultats sur banc dessai, nous pouvons dire dune ma-
nire gnrale que lutilisation du modle thorique permet de calibrer correctement les
gains du contrleur. Cette approche permet, mme pour les points de fonctionnement o
lIMV est faiblement ouverte (i.e proche de la fermeture), dobtenir un modle plus prcis
et donc une meilleure calibration.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14
Mise en oeuvre de la nouvelle stratgie
de commande
Sommaire
14.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
14.2 Intgration de la loi de commande monovariable . . . . . 164
14.2.1 Le contrleur H
LFT . . . . . . . . . . . . . . . . . . . . 164
14.2.2 Intgration du contrleur dans lECU . . . . . . . . . . . . 166
14.2.3 Quantication des signaux . . . . . . . . . . . . . . . . . . 166
14.3 Tests et validations sur vhicule . . . . . . . . . . . . . . . 167
14.3.1 Contrle par lIMV seule . . . . . . . . . . . . . . . . . . . 167
14.3.2 Contrle par lIMV et lHPV . . . . . . . . . . . . . . . . . 176
14.3.3 Passage IMV seule vers IMV et HPV puis fermeture de lHPV181
14.3.4 Passage du mode de fermeture de lHPV vers lIMV seule . 184
14.1 Introduction
Nous prsentons dans ce chapitre les rsultats du contrle de la pression rail par
la nouvelle stratgie de commande : les structures de lensemble des contrleurs ainsi
que la gestion de commutation dun mode de contrle un autre ont entirement t
redveloppes. La totalit des essais prsents dans ce chapitre ont t raliss sur vhicule
(Mercedes Classe E 220). Pour valider notre stratgie de commande sur lensemble des
cas de fonctionnement (i.e. selon ltat de lHPV, ferme ou ouverte), nous avons ralis
dirents essais montrant les deux modes de contrle de la pression :
Contrle monovariable par lIMV (g. 10.1) : seule lIMV contrle la pression (com-
mande H
LFT priode dchantillonnage variable), tandis que lHPV est main-
tenue ferme par une boucle de rgulation sur son courant (commande H
LTI
temps continu discrtise en ligne dans lECU en fonction de la priode dchan-
tillonnage),
Contrle multivariable par lIMV et lHPV (g. 10.4) : lHPV contrle la pression
rail (commande H
LTI temps continu discrtise en ligne dans lECU en fonction
163
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
164 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
de la priode dchantillonnage) tandis que lIMV contrle le dbit de la pompe HP
en boucle ouverte.
Dautre essais ont t raliss montrant des commutations de mode de contrle : ouverture
et fermeture de lHPV. Certains essais ont t tests par les deux stratgies an de mettre
en avant les amliorations obtenues.
Limplantation de notre stratgie de commande a t faite directement dans lECU.
Nous avons donc pris en compte les contraintes dintgration en virgule xe
24
pour que
le rsultat de chaque calcul soit correct, ainsi que la minimisation du temps de calcul des
lois de commande. Limplantation de la loi de commande H
LFT dans lECU (i.e. forme
du contrleur et quantication des signaux) est prsente. Cette tape est primordial car
il en dpend la justesse du calcul de la commande, et donc du contrle de la pression.
Les implantations des autres lois de commande, dont leur structure est plus simple que
celle du contrleur LFT, suivent la mme mthodologie et ne sont pas dtailles dans ce
mmoire.
14.2 Intgration de la loi de commande monovariable
14.2.1 Le contrleur H
LFT
Lapplication de la commande de lIMV pour le contrle monovariable de la pression
rail (g. 10.1) est le rsultat du calcul de la LFT infrieure entre le contrleur K
imv
prail
et
les paramtres variants, c.f. gure 14.1.
K(z)
U
imv
y
q
c
w
c
Fig. 14.1 LFT infrieure du contrleur avec les paramtres variants
La commande U
imv
est donc le rsultat du calcul suivant :
X
c
k+1
= AX
c
k
+ B
k1
y
k
+ B
k
U
imv
= C
k1
X
c
k
+ D
k11
y
k
+ D
k1
q
c
= C
k
X
c
k
+ D
k1
y
k
+ D
k
= q
c
24
les nombres sont cods par une partie entire et une partie dcimale dont leur taille est prdnie et
ge, ce qui dtermine une plage de valeur et une prcision
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.2. Intgration de la loi de commande monovariable 165
soit :
(I D
k
) q
c
= C
k
X
c
k
+ D
k1
y
k
q
c
= (I D
k
)
1
C
k
X
c
k
+ (I D
k
)
1
D
k1
y
k
ce qui nous donne pour le calcul de la LFT infrieure le rsultat suivant :
X
c
k+1
= A
k
X
c
k
+ B
k
(I D
k
)
1
C
k
X
c
k
+ B
k
(I D
k
)
1
D
k1
y
k
+ B
k1
y
k
U
imv
= C
k1
X
c
k
+ D
k1
(I D
k
)
1
C
k
X
k
+ D
k1
(I D
k
)
1
D
k1
y
k
+ D
k11
y
k
soit :
_
X
c
k+1
U
imv
_
=
_
/() B ()
c () T()
__
X
c
k
y
k
_
o les matrices /(), B (), c () et T() sont calcules en ligne et dpendent des
paramtres du systme : pression rail, rgime moteur et temprature du carburant.
/() = A
k
+ B
k
(I D
k
)
1
C
k
B () = B
k1
+ B
k
(I D
k
)
1
D
k1
c () = C
k1
+ D
k1
(I D
k
)
1
C
k
T() = D
k11
+ D
k1
(I D
k
)
1
D
k1
La gure 14.2 montre la reprsentation dtat du contrleur paramtres variables.
z
1
/()
T()
c () B ()
y
U
imv
Fig. 14.2 Calcul de la loi de commande de lIMV sous forme de reprsentation dtat
Les tapes raliser pour calculer la commande sont :
1 : calcul de (I D
k
)
1
2 : calcul des matrices c () et T()
3 : calcul de la commande U
imv
= c () X
c
k
+T() y
k
4 : calcul des matrices /() et B ()
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
166 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
5 : calcul du vecteur dtat X
c
k+1
= /() X
c
k
+B () y
k
Les tapes 1, 2 et 3 doivent tre ralises le plus rapidement possible pour permettre
dappliquer la commande ds le dbut de la priode dchantillonnage. Les tapes 4 et 5
doivent tre ralises avant la prochaine priode dchantillonnage.
14.2.2 Intgration du contrleur dans lECU
Lintgration dans le calculateur impose deux contraintes principales. La premire est
le temps dexcution des calculs raliser, en eet il faut que le calculateur soit capable
deectuer les oprations pour le contrle de la pression mais aussi le reste des stratgies
(e.g. cruise control, injection, etc.). Cette partie est optimise par rapport la manire
dont les stratgies de contrle sont mises en oeuvre. Ainsi, il sera moins coteux de faire
une interpolation de gains plutt que de calculer la LFT infrieure du contrleur. La
seconde contrainte est la ralisations des calculs en virgule xe.
Nous avons calcul le nombre doprations ncessaires pour raliser les tapes 1
5 prcdemment dnis pour le calcul de la lois de commande de lIMV sous forme de
reprsentation dtat. Nous dnombrons au total :
552 multiplications,
512 additions,
le calcul de linverse dune matrice (4 4).
Nous proposons une approche o le contrleur est implant en forme dquation de
rcurrence dont chaque coecient est cartographi en fonction du point de fonctionne-
ment. Ces cartographies sont obtenues par le calcul du contrleur T
l
(K(), ) suivi dune
rduction dordre. Nous avons retenu cette solution et le nombre doprations ncessaires
pour le calcul de la loi de commande de lIMV est le suivant :
90 multiplications,
125 additions.
Cette solution rduit par 6 le nombre de multiplications et par 4 le nombre dadditions.
Dautre part, il nest plus ncessaire de faire le calcul de linverse dune matrice (4 4).
14.2.3 Quantication des signaux
LECU sur lequel nous travaillons eectue les calculs en virgule xe. Pour que les
direntes oprations soient correctement ralises, chaque signal doit tre pralablement
quanti. Pour cela, le signal doit tre born par une valeur minimale V
min
et maximale
V
max
. Si ce signal est le rsultat dun calcul, il faut alors prendre les valeurs extrmes du
rsultat qui sont calcules en fonction des valeurs minimales et maximales des signaux
dentre. Cette tape doit tre ralise de manire rigoureuse car le bon fonctionnement
de la stratgie de contrle en dpend directement. Il sut pour cela dcrire un tableau
dans lequel tous les signaux dune stratgie sont rfrencs, dcrire les valeurs extrmes
des signaux dentres, puis deectuer les calculs un un, pour la stratgie considre
jusqu arriver aux sorties. Voici titre dexemple la partie du tableau correspondant
une multiplication entre deux nombres pralablement dnis. Il sut donc juste de trouver
les nombres de bits ncessaires pour la partie entire (N) et dcimale (D), et choisir si le
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 167
signal est sign de telle sorte quon ait sur une mme ligne les relation suivantes :
_
V
min
> min
V
max
< max
(14.1)
avec V
min
et V
max
respectivement les valeurs minimale et maximale que peut prendre le
signal et min et max repectivement les valeurs minimale et maximale des la quanti-
cation du signal en virgule xe qui dpendent du choix du nombre de bits pour la partie
entire et la partie dcimale et si le nombre est sign ou non.
e
1
e
2
s
Fig. 14.3 Quantication dun nombre
dsignation V
min
V
max
sign N D min max prcision
e
1
1 4 0 16 0 0 65535 1
e
2
0,1 1,5 0 1 15 0 1,9999 3, 05 10
5
s 0,1 6 0 3 13 0 7,999 1, 22 10
4
14.3 Tests et validations sur vhicule
La validation de la nouvelle stratgie globale de commande dveloppe a t eectue
suivant trois types dessais. Dans le premier, le contrle de la pression rail est ralis par
lIMV seule. Les avantages de la structure du contrleur sont mis en avant. Ensuite nous
prsentons le contrle de la pression rail eectu par lHPV. Deux essais illustrent le rsul-
tat selon le choix de la structure du contrleur utilise. Finalement le comportement de la
pression rail pendant les changements de mode de contrle est prsent. Plusieurs essais
ont t faits sur vhicule pour dcomposer lensemble des transitions de mode. Ltude de
chaque transition est compare avec le rsultat quivalent de la stratgie actuelle.
14.3.1 Contrle par lIMV seule
Essai 1 : prol en "montagnes russes"
LIMV ne permet pas de dcharger le rail. Pendant une dclration rapide, obtenue
par un brutal lever de pied, la demande dinjection peut tre nulle pendant que la demande
de pression diminue. Dans ce cas, louverture de lHPV est requise pour crer un dbit de
fuite, an de suivre la rfrence de pression. Nous avons donc ralis des essais sur vhicule
tels que la demande dinjection ne soit jamais nulle pour ne pas solliciter louverture de
lHPV.
Nous rappelons que la stratgie de contrle en mode monovariable est constitue de
deux contrleurs : le premier agit sur la pression et le second sur le courant de lHPV.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
168 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
25 30 35 40 45 50 55
300
350
400
450
500
550
600
650
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
25 30 35 40 45 50 55
50
20
0
20
50
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Demande
Pression rail
Fig. 14.4 Essai 1 - Nouvelle stratgie de commande : contrle de la pression rail par
lIMV seule - suivi et erreur de consigne de pression
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 169
Nous avons eectu des sries dacclrations et de dclrations sur le rgime moteur
pour raliser lessai (g. 14.5). Les rfrences de pression rail et de courant HPV sont des
rampes, positives et ngatives. Les rsultats de cet essai sont prsents sur les gures 14.4
et 14.7. Les performances du contrle de la pression sont prsentes la gure 14.4 (trac
infrieur). Nous avons trac les seuils de tolrance de lerreur de pression (en transitoire :
50 bar, en statique : 5 bar en-dessous de 500 bar puis 5% de la demande de pression au-
del). Lerreur de tranage durant les transitoires arrive atteindre le seuil de tolrance
de lerreur statique. Cette performance est obtenue grce la structure du contrleur.
Celui-ci est constitu dun double intgrateur qui permet davoir une erreur de tranage
nulle. Les variations ngatives la fois du dbit inject et de la demande de pression ne
crent pas derreur importante. Laction du contrleur en boucle ouverte sur la demande
dinjection permet danticiper la commande de lIMV. Nanmoins lerreur de pression
atteint deux instants la limite du seuil de tolrance de lerreur. Ceci nest pas d au
dbit dinjection mais des variations plus brutales de la demande de pression.
25 30 35 40 45 50 55
1500
2000
2500
Temps [s]
R
g
i
m
e
m
o
t
e
u
r
[
t
r
/
m
i
n
]
25 30 35 40 45 50 55
2
4
6
8
10
12
14
Temps [s]
F
u
e
l
l
i
n
g
[
m
g
/
c
o
u
p
]
Fig. 14.5 Essai 1 - Nouvelle stratgie de commande : contrle de la pression rail par
lIMV seule - variation du rgime moteur et de la demande dinjection
La commande de lIMV (g. 14.6) est volontairement bruite. Ceci permet dviter le
phnomne de stick-slip
25
et de rduire les problmes dhystrsis mcanique. Lactionneur
25
qui signie coller-glisser
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
170 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
est sollicit en permanence ce qui lempche de simmobiliser. La raction de lIMV vis-
-vis de la commande est alors meilleure.
25 30 35 40 45 50 55
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
6
Temps [s]
C
o
m
m
a
n
d
e
I
M
V
[
V
]
Fig. 14.6 Essai 1 - Nouvelle stratgie de commande : contrle de la pression rail par
lIMV seule - commande de lIMV
Lanalyse des variations du dbit dinjection (g. 14.5) et de la commande de lIMV
(g. 14.6) montre laction du contrleur en boucle ouverte sur la commande de laction-
neur. En eet, alors que lerreur de pression est encore faible, la commande de lIMV
ragit pour anticiper la variation du dbit inject.
Le courant traversant lactionneur de dcharge doit voluer en fonction de la pression
rail pour le maintenir ferm et minimiser la consommation dnergie du systme. Si la
pression est faible alors le courant est faible et vice versa. La demande de courant de
lHPV est donc fonction de la pression rail. La gure 14.7 montre le rsultat du contrle
du courant. Malgr un fort bruit sur la lecture du courant de lHPV, le contrleur arrive
suivre la rfrence et assure que lactionneur reste bien ferm.
Essai 2 - prol en acclration, comparaison entre les deux stratgies
Lessai eectu est une acclration moteur. Pendant cette acclration la demande de
pression augmente. Nous analysons lerreur de tranage obtenue.
La gure 14.8 prsente le rsultat de la stratgie actuelle. Lerreur de pression est en-
dessous du seuil de tolrance avant le dbut de laugmentation de la demande de pression.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 171
25 30 35 40 45 50 55
500
550
600
650
700
750
800
850
900
950
1000
Temps [s]
C
o
u
r
a
n
t
[
A
]
Demande
Courant HPV
Fig. 14.7 Essai 1 - Nouvelle stratgie de commande : contrle de la pression rail par
lIMV seule - suivi de la consigne du courant de lHPV
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
172 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
Lerreur de pression sort du seuil de tolrance vers 8.4 s (au-del de +50 bar derreur)
lorsque la demande de pression augmente. Lerreur diminue rapidement puis ressort du
seuil de tolrance (en-dessous de 50 bar derreur) lorsque la variation de la demande de
pression diminue. La gure 14.9 montre la commande de lIMV calcule par le contrleur
6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11
400
600
800
1000
1200
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11
150
100
50
0
50
100
150
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Demande
Pression rail
Fig. 14.8 Essai 2 - stratgie actuelle : contrle de la pression par lIMV seule - suivi et
erreur de consigne
actuel. Celle-ci est relativement douce et peu bruite. La structure du contrleur, i.e. un
PID, ne permet pas davoir une erreur de tranage nulle.
La gure 14.10 prsente le rsultat de la stratgie propose. De la mme manire que
pour lessai prcdent, lerreur de pression est en-dessous du seuil de tolrance avant le
dbut de lacclration. Lerreur de tranage, lorsque la demande de pression augmente, est
trs faible et arrive presque satisfaire les tolrances derreur statique alors que le systme
est en rgime transitoire. Lorsque la variation de la demande de pression sannule, lerreur
dpasse lgrement le seuil de tolrance ( 60 bar). Cette erreur est ensuite rapidement
rduite. La gure 14.11 montre la commande de lIMV pour cet essai. Cette commande
est plus bruite que celle de la stratgie actuelle (g. 14.9). La structure du contrleur,
plus complexe que celle dun PID, permet davoir un double intgrateur pour tendre vers
une erreur de tranage nulle.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 173
6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11
800
850
900
950
1000
1050
1100
Temps [s]
C
o
u
r
a
n
t
I
M
V
[
m
A
]
Fig. 14.9 Essai 2 - stratgie actuelle : contrle de la pression par lIMV seule - commande
de lIMV
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
174 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
300
400
500
600
700
800
900
1000
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
60
40
20
0
20
40
60
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Demande
Pression rail
Fig. 14.10 Essai 2 - nouvelle stratgie de commande : contrle de la pression par lIMV
seule - suivi et erreur de consigne
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 175
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
4.4
4.6
4.8
5
5.2
5.4
Temps [s]
C
o
m
m
a
n
d
e
I
M
V
[
V
]
Fig. 14.11 Essai 2 - nouvelle stratgie de commande : contrle de la pression par lIMV
seule - commande de lIMV
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
176 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
14.3.2 Contrle par lIMV et lHPV
En mode multivariable, les deux actionneurs sont utiliss pour contrler la pression
(g. 10.4). LHPV rgule la pression : la synthse du contrleur K
hpv
prail
sest faite en temps
continu et le contrleur est discrtis en ligne dans lECU. LIMV contrle, en boucle
ouverte, la demande de dbit de lHPV. Les esssais qui suivent ont t raliss avec une
demande de dbit HPV leve pour ne pas travailler des points de fonctionnement o
le systme serait sous capacitaire conduisant la fermeture de lHPV. La commande de
lIMV ne varie pas. Nous proposons deux solutions pour le contrleur qui sont toutes les
deux des commandes H
LTI temps continu discrtises en ligne dans lECU en fonction
de la priode dchantillonnage. La premire a un seul intgrateur dans la fonction de
transfert du contrleur, la seconde a un double intgrateur pour chercher obtenir une
erreur de tranage nulle.
Essai 3 - contrleur avec un seul intgrateur
La gure 14.12 prsente le rsultat de lessai du contrle de la pression par lHPV. De
fortes erreurs de tranage sont prsentes. Celles-ci sortent des tolrances xes. Nanmoins,
cette solution prsente lavantage de ne pas crer de dpassement. Nous pourrions pour
diminuer lerreur de tranage et tenter de passer sous le seuil de tolrance, augmenter le
temps de rponse du systme en boucle ferme. Mais nous aurions toujours la prsence
dune erreur de tranage non nulle. La gure 14.13 montre lvolution du rgime moteur
et de la demande dinjection. Les fortes baisses de demande dinjection (p.e. vers 47.2 s)
ne crent pas de dpassement sur la pression. En eet, le contrleur de pression par lHPV
russit rejeter la perturbation de dbit due la demande dinjection et suivre en mme
temps la demande de pression.
Essai 4 - contrleur avec un double intgrateur
La gure 14.14 montre le rsultat de lessai du contrle de la pression. Lerreur de
tranage est prsent en-dessous du seuil de lerreur maximale admise mais en contrepar-
tie, nous notons la prsence de dpassements. Ces derniers crent une erreur de pression
au-del de 50 bar. Cette solution permet de rduire drastiquement la valeur de lerreur
de tranage, nous natteignons plus les 200 bar derreur. Dautre part, les dpassements
engendrs sont infrieurs la valeur des erreurs de tranage de la premire solution.
La gure 14.15 montre lvolution du rgime moteur et de la demande dinjection.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 177
30 32 34 36 38 40 42 44 46 48 50
500
1000
1500
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
30 32 34 36 38 40 42 44 46 48 50
200
100
0
100
200
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Fig. 14.12 Essai 3 - nouvelle stratgie de commande : contrle en mode multivariable -
suivi et erreur de consigne (1 seul intgrateur)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
178 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
30 32 34 36 38 40 42 44 46 48 50
1000
1500
2000
2500
3000
3500
4000
Temps [s]
R
g
i
m
e
m
o
t
e
u
r
[
t
r
/
m
i
n
]
30 32 34 36 38 40 42 44 46 48 50
0
20
40
60
80
Temps [s]
F
u
e
l
l
i
n
g
[
m
g
/
c
p
]
Fig. 14.13 Essai 3 - nouvelle stratgie de commande : contrle en mode multivariable -
variation du rgime moteur et de la demande dinjection (1 seul intgrateur)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 179
8 10 12 14 16 18 20
200
400
600
800
1000
1200
1400
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
8 10 12 14 16 18 20
200
100
0
100
200
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Fig. 14.14 Essai 4 - nouvelle stratgie de commande : contrle en mode multivariable -
suivi et erreur de consigne (2 intgrateurs)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
180 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
8 10 12 14 16 18 20
1000
1500
2000
2500
3000
Temps [s]
R
g
i
m
e
m
o
t
e
u
r
[
t
r
/
m
i
n
]
8 10 12 14 16 18 20
0
10
20
30
40
50
Temps [s]
F
u
e
l
l
i
n
g
[
m
g
/
c
p
]
Fig. 14.15 Essai 4 - nouvelle stratgie de commande : contrle en mode multivariable -
variation du rgime moteur et de la demande dinjection (2 intgrateurs)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 181
14.3.3 Passage IMV seule vers IMV et HPV puis fermeture de
lHPV
Nous comparons dans cette partie la stratgie dveloppe avec celle actuellement uti-
lise, pour le cas dune acclration du moteur suivie dune dclration (cas typique de
conduite urbaine).
La gure 14.16 montre le contrle de la pression eectu par la stratgie actuelle.
Lessai commence lorsque le moteur est au ralenti et que la pression est contrle par
lIMV seule (lHPV est ferme), il sagit de la phase 1. Lors de lacclration, la demande
de pression augmente (sous forme dune rampe) et une erreur se cre, dont la valeur
excde la tolrance du cahier des charges. Cette erreur est ensuite rduite et lerreur de
trainage devient nulle. Lors de la dclration (le rgime moteur est 3330 tr/min et la
4 4.5 5 5.5 6
200
400
600
800
1000
1200
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
4 4.5 5 5.5 6
200
100
0
100
200
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Demande
Pression rail
1 2 3 2 3
Fig. 14.16 Essai 5 - stratgie actuelle : changement de mode de contrle - suivi et erreur
de consigne de pression rail
demande dinjection devient nulle), la demande de pression chute tandis que la pression
rail continue augmenter. Un fort dpassement se cre car la variation de dbit dans
le rail est soudainement positive. LHPV souvre alors pour permettre de dcharger le
rail, il sagit de la phase 2. Louverture de lHPV permet de rejoindre la demande de
pression. Lorsque les conditions sont atteintes, la demande de fermeture de lactionneur
de dcharge est active, il sagit de la phase 3. cet instant lIMV se met contrler
la pression tandis quune rampe de courant est applique sur lactionneur de dcharge
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
182 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
pour permettre sa fermeture. Nous constatons que le contrleur de pression a du mal
rejoindre correctement la consigne, car lIMV doit la fois rejeter la variation rapide de
dbit de lHPV (due sa fermeture) et assurer la rgulation. la n de cette phase, lIMV
et lHPV sont tous les deux fermes, seules les faibles fuites statiques des injecteurs sont
prsentes ce qui explique la forme plate de la pression rail observe partir de linstant
5.6 s. LHPV souvre nouveau pour permettre de dcharger le rail an de rejoindre la
demande.
prsent, nous prsentons le rsultat de notre stratgie de commande pour le mme
scnario, cest--dire une acclration du moteur suivi dune dclration. Nanmoins, au
dbut de lacclration le contrleur de pression est en mode de fermeture de lHPV, il
sagit de la phase 1. A linstant 99 s ltat ferm de lHPV est dtect alors que la demande
de pression commence augmenter, cause de lacclration du moteur. Le contrle de la
pression passe en mode de contrle par lIMV seule tandis que lHPV est maintenue ferme.
Une erreur de pression est note pendant cette transition mais elle reste lintrieur
des tolrances du cahier des charges. La structure du contrleur, savoir un double
98.8 99 99.2 99.4 99.6 99.8 100 100.2 100.4
200
400
600
800
1000
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
98.8 99 99.2 99.4 99.6 99.8 100 100.2 100.4
200
150
100
50
0
50
100
Temps [s]
E
r
r
e
u
r
p
r
e
s
s
i
o
n
[
b
a
r
]
Demande
Pression rail
1 2
4
1
3
Fig. 14.17 Essai 5 - nouvelle stratgie de commande : changement de mode de contrle
- suivi et erreur de consigne de pression rail
intgrateur dans la fonction de sensibilit e/r, permet davoir rapidement une erreur de
trainage quasi-nulle. Pendant la phase de dclration, la variation brutale de demande
dinjection est prise en compte par le contrleur en boucle ouverte. Nous constatons
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 183
98.8 99 99.2 99.4 99.6 99.8 100 100.2 100.4
0
10
20
30
40
Temps [s]
D
e
m
a
n
d
e
d
i
n
j
e
c
t
i
o
n
98.8 99 99.2 99.4 99.6 99.8 100 100.2 100.4
3.5
4
4.5
5
5.5
6
6.5
Temps [s]
C
o
m
m
a
n
d
e
I
M
V
[
V
]
1
2
4 1
3
Fig. 14.18 Essai 5- contrle de la pression par la nouvelle stratgie : demande dinjection
et commande IMV
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
184 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
eectivement la gure 14.18 que la commande de lIMV augmente brutalement pour
rduire le dbit de la pompe an de compenser la forte diminution du dbit inject, alors
qu cet instant lerreur de pression est encore faible (infrieure 30 bar). Cette action
permet de minimiser llvation de la pression dans le rail. LHPV est ensuite rapidement
ouverte pour permettre de faire chuter la pression, il sagit de la phase 3. La phase 4 dbute
immdiatement aprs et consiste contrler en boucle ferme la pression par lHPV et
contrler en boucle ouverte le dbit de lIMV. La pression rail rejoint la demande avec une
erreur de trainage mais sans dpassement. A cet instant, les conditions pour la fermeture
de lHPV sont valides, la stratgie passe alors en mode de fermeture de lHPV, il sagit
nouveau de la phase 1.
Conclusion
La stratgie de contrle propose est meilleure pour le suivi de la rampe de demande
de pression, mme lorsquelle commute de mode au dbut de lacclration. Deux raisons
permettent dexpliquer ceci, tout dabord la technique utilise pour fermer lHPV permet
de prpositionner correctement lIMV par rapport la consommation du systme, ce qui
signie quau moment du changement de mode le contrleur sinitialisera en fonction des
besoins du systme. Dautre part la structure du contrleur de lIMV, avec le double
intgrateur, permet de suivre la consigne en forme de rampe.
En ce qui concerne le suivi de trajectoire lors de la dclration, la stratgie actuelle
prsente une forte lvation de la pression alors que la demande chute. Bien que la demande
dinjection soit nulle lors de la dclration, il est prfrable davoir le meilleur suivi de
consigne an de permettre lors dune nouvelle acclration ou lors de laccostage du ralenti,
et donc dune reprise dinjection, davoir une erreur de pression trs faible an dobtenir de
bonnes performances. La stratgie propose a une erreur plus faible lors de la dclration,
qui pourrait tre encore amliore en modiant la structure du contrleur de pression par
lHPV. La prise en compte de la demande dinjection dans le contrleur de pression permet
dviter une forte erreur de pression au dbut de la dclration.
14.3.4 Passage du mode de fermeture de lHPV vers lIMV seule
Essai 6 - fermeture pendant une demande dinjection nulle
Nous prsentons aux gures 14.19 et 14.20 le rsultat de la stratgie actuelle de fer-
meture de lactionneur de dcharge. Lorsque la demande dinjection est nulle, la pression
rail ralise une forme descalier pour essayer de suivre la chute de la demande de pression.
Ceci sexplique assez facilement : le dbit dinject tant nul, quand lHPV se ferme, les
fuites statiques des injecteurs constituent le seul moyen pour faire chuter la pression rail,
lIMV est dans ce cas ferme. Or les fuites sont insusantes pour permettre de suivre la
rfrence de pression. LHPV est donc oblige de souvrir chaque fois que lerreur de
pression devient trop grande. Ds que les injections reprennent, lIMV souvre nouveau,
ce qui permet de contrler la pression. Nanmoins durant cette phase, i.e. au-del de 4
s, la fermeture de lHPV provoque un fort dpassement de pression (environ 80 bar der-
reur). La gure 14.21 montre lvolution de la demande dinjection et du rgime moteur
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 185
2.5 3 3.5 4 4.5 5 5.5
200
300
400
500
600
700
800
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
2.5 3 3.5 4 4.5 5 5.5
200
400
600
800
1000
1200
1400
Temps [s]
C
o
m
m
a
n
d
e
[
m
A
]
Demande
Pression rail
IMV
HPV
1 2 3 2
3 2 3 2 3
1
Fig. 14.19 Essai 6 - stratgie actuelle : fermeture de lHPV - suivi de consigne de pression
rail et commandes des actionneurs (1 : IMV seule, 2 : ouverture HPV, 3 : fermeture HPV)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
186 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
pendant cet essai. Il sagit dun retour sur ralenti o nous pouvons constater que lors
de la dclration du moteur la demande dinjection est nulle, jusqu ce que linjection
reprenne pour maintenir le rgime de ralenti.
2.5 3 3.5 4 4.5 5 5.5
60
40
20
0
20
40
60
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Fig. 14.20 Essai 6 - stratgie actuelle : fermeture de lHPV - erreur de pression rail
Nous prsentons prsent le rsultat de notre stratgie de fermeture de lactionneur
de dcharge pour le mme type dessai (g. 14.22, 14.23 et 14.24).
Pendant la chute de pression, lIMV se ferme pour rduire le dbit de lHPV pendant
que ce dernier contrle la pression. Contrairement aux rsultats obtenus avec la stratgie
actuelle, nous navons pas de forme descalier mais le suivi de consigne attendu. Au mo-
ment du changement de mode de contrle, nous constatons que la commande de lIMV
ne subit pas de variation brutale et que celle-ci reste pratiquement la mme valeur que
la dernire commande avant le changement de mode. Lutilisation du rgulateur de dbit
du systme comme stratgie de fermeture de lHPV montre bien que lorsque lHPV se
ferme, lIMV est correctement positionne par rapport la consommation du systme.
Au moment du changement de mode, la commande de lHPV augmente brutalement.
Ceci est simplement d la mise en marche de la rgulation de courant de lHPV an de
la maintenir ferme. La gure 14.24 montre lvolution de la demande dinjection et du
rgime moteur.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 187
2.5 3 3.5 4 4.5 5 5.5
0
10
20
30
40
Temps [s]
D
e
m
a
n
d
e
d
i
n
j
e
c
t
i
o
n
[
m
g
/
c
p
]
2.5 3 3.5 4 4.5 5 5.5
500
1000
1500
2000
2500
3000
Temps [s]
R
g
i
m
e
m
o
t
e
u
r
[
t
r
/
m
i
n
]
Fig. 14.21 Essai 6 - stratgie actuelle : fermeture de lHPV - volution de la demande
dinjection et du rgime moteur
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
188 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
0.5 1 1.5 2 2.5 3 3.5 4
200
300
400
500
600
700
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
0.5 1 1.5 2 2.5 3 3.5 4
0
1
2
3
4
5
6
Temps [s]
C
o
m
m
a
n
d
e
[
V
]
Demande
Pression rail
IMV
HPV
Fermeture HPV IMV seul
Fig. 14.22 Essai 6 - nouvelle stratgie de commande : fermeture de lHPV - suivi de
consigne de pression rail et commandes des actionneurs
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 189
0.5 1 1.5 2 2.5 3 3.5 4
60
40
20
0
20
40
60
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Fig. 14.23 Essai 6 - nouvelle stratgie de commande : fermeture de lHPV - erreur de
pression rail
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
190 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
0 0.5 1 1.5 2 2.5 3 3.5 4
0
2
4
6
8
10
12
Temps [s]
D
e
m
a
n
d
e
d
i
n
j
e
c
t
i
o
n
[
m
g
/
c
p
]
0 0.5 1 1.5 2 2.5 3 3.5 4
500
1000
1500
2000
2500
3000
Temps [s]
R
g
i
m
e
m
o
t
e
u
r
[
t
r
/
m
i
n
]
Fig. 14.24 Essai 6 - nouvelle stratgie de commande : fermeture de lHPV - variation
de la demande dinjection et du rgime moteur
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 191
Essai 7 - fermeture pendant une demande dinjection non nulle
Nous prsentons prsent les essais vhicules dune fermeture de lactionneur de d-
charge lorsque le dbit inject est non nul. Les gures 14.25 et 14.26 montrent le rsultat
obtenu avec la stratgie actuelle. Nous constatons une erreur de pression de 50 bar lorsque
lHPV se ferme. La perturbation cre par laugmentation de la commande de lHPV est
trs mal rejete par lIMV.
0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4
200
220
240
260
280
300
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4
200
400
600
800
1000
Temps [s]
C
o
m
m
a
n
d
e
[
m
A
]
IMV
HPV
Demande
Pression rail
1
2
3
Fig. 14.25 Essai 7 - stratgie actuelle : fermeture de lHPV - suivi de consigne de pression
rail et commandes des actionneurs (1 :ouverture HPV, 2 :fermeture HPV, 3 :IMV seule)
Les gures 14.27 et 14.28 montrent le rsultat avec la nouvelle stratgie de commande.
Laugmentation de la commande de lIMV, faisant rduire le dbit de lHPV grce la
boucle naturelle de rgulation de dbit, cre une baisse de la pression rail compense
par laugmentation de la commande de lHPV. Ceci explique pourquoi la pression rail
a tendance tre en-dessous de la consigne de pression. Lorsque lHPV est dtecte
ferme, nous commutons de mode : lHPV passe en boucle de rgulation de courant et
lIMV contrle la pression rail. Lors de cette commutation lerreur de pression est faible
(< 20 bar) ce qui ne cre pas de variation forte de la commande de lIMV, et lIMV
est correctement positionne puisque sa commande maintient le mme niveau de tension
quau moment de la commutation de mode.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
192 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4
80
60
40
20
0
20
40
60
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Fig. 14.26 Essai 7 - stratgie actuelle : fermeture de lHPV - erreur du suivi de consigne
de pression rail
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
14.3. Tests et validations sur vhicule 193
1 2 3 4 5 6 7 8 9
200
220
240
260
280
300
Temps [s]
P
r
e
s
s
i
o
n
[
b
a
r
]
1 2 3 4 5 6 7 8 9
0
1
2
3
4
5
6
Temps [s]
C
o
m
a
n
d
e
[
V
]
Demande
Pression rail
IMV
HPV
Fermeture HPV IMV seul
Fig. 14.27 Essai 7 - nouvelle stratgie de commande : fermeture de lHPV - suivi de
consigne de pression rail et commandes des actionneurs
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
194 Chapitre 14. Mise en oeuvre de la nouvelle stratgie de commande
1 2 3 4 5 6 7 8 9
80
60
40
20
0
20
40
60
Temps [s]
E
r
r
e
u
r
d
e
p
r
e
s
s
i
o
n
[
b
a
r
]
Fig. 14.28 Essai 7 - nouvelle stratgie de commande : fermeture de lHPV - erreur du
suivi de consigne de pression rail
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
Cinquime partie
Conclusion Gnrale
195
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
15
Bilan des rsultats obtenus
Ces travaux de thse ont dmarr avec ltude de la problmatique du contrle de la
pression rail pour arriver lintgration eective dans lECU dune solution permettant
de tester sur vhicule les performances obtenues par la stratgie dveloppe.
La premire partie prsente le moteur Diesel et le systme dinjection direct Com-
mon Rail. Une prsentation technique des dirents lments qui composent le systme
Common Rail est donne.
Dans la deuxime partie du mmoire, nous avons dvelopp un modle de connaissance
du systme dinjection Common Rail. Nous avons tudi dirents domaines, principa-
lement llectromagntique, lhydraulique et la mcanique. Un modle non linaire a t
dvelopp sous MatLab/SimuLink. Celui-ci a t test et valid en plusieurs tapes par-
tir de comparaisons de rsultats soit avec des simulations issues du logiciel AmeSim, soit
avec des essais rels. Un modle linaire paramtres variants partir du modle non
linaire a t dni en vue dune commande LPV.
Dans la troisime partie, nous avons prsent lensemble des commandes. Tout dabord
nous faisons une prsentation de la stratgie globale qui permet de comprendre les dif-
frents tats de contrle du systme (i.e. HPV ferme ou ouverte). Ensuite nous avons
prsent les lois de commandes utilises pour raliser lensemble du contrle de la pression
rail : la commande H
dans le cas des modles LTI temps continu et discret ainsi que
pour les modles LFT temps discret. Finalement, nous avons prsent lapplication de
la synthse H
LFT temps discret pour le contrle de la pression rail par lIMV (i.e.
lHPV ferme). La synthse du contrleur ainsi que lanalyse du systme en boucle ferme
ont t prsentes. Des simulations, utilisant des rfrences des signaux issues dessais
rels prsents dans la quatrime partie, ont mis en avant les performances thoriques
obtenues.
Dans la quatrime partie nous avons prsent la mise en oeuvre des direntes tudes
ralises. Tout dabord, nous avons utilis le modle linaris tangent issu du modle non
linaire pour permettre de synthtiser les gains des contrleurs de la stratgie actuelle
(PID). Aprs une comparaison entre les modles thoriques et identis, nous avons pr-
sent les rsultats de contrle de la pression rail en boucle ferme, obtenus partir du mo-
dle thorique. Ces essais ont montr un trs bon niveau de conance vis--vis du modle
thorique. Ils ont donc permis de valider de manire indirecte le modle de connaissance.
Dautre part, nous avons prsent les rsultats de la nouvelle stratgie de commande.
197
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
198 Chapitre 15. Bilan des rsultats obtenus
Nous avons ralis des essais pour lesquels le systme se trouve dans direntes congu-
rations an de valider tous les modes de contrle. Les phases de contrle les plus dlicates
(i.e. contrle par lIMV seule et fermeture de lHPV) ont t compares avec les rsultats
de la stratgie actuelle. Chaque comparaison a montr que la solution propose amliore
sensiblement les performances de contrle.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
16
Perspectives
Le modle LFT du systme Common Rail permet de dnir le comportement de ce
dernier en fonction des paramtres (supposs mesurables) qui modient la dynamique
du systme. Dans le cas o lun des paramtres nest pas mesurable, nous ne pouvons
pas tablir prcisment le comportement du systme. Il faut donc choisir une valeur de
ce paramtre pour dnir un modle nominal utilis pour la synthse et sassurer que le
contrleur sera robuste. Nous avons fait ainsi pour la position de lIMV x
0
imv
. Nous avons
choisi comme position nominale la valeur mdiane entre la valeur minimale et maximale.
Il serait intressant dtudier, selon des critres de robustesse et de performance, la valeur
nominale optimale de la position de lIMV x
0
imv
choisir pour dnir le modle.
Dans la partie mise en oeuvre, nous avons prsent le rsultat des essais de la nou-
velle stratgie de contrle propose. Nous avons remarqu que pour obtenir des erreurs
de tranage nulles, la stratgie dvelope induit en contre partie des dpassements. Les
schmas de synthse utiliss sont simples et prennent en compte uniquement lerreur de
pression
26
. Nous pourrions donc tudier dautre schmas de synthse, p.e. en prenant en
compte lerreur de pression rail ainsi que la pression rail lue, pour chercher minimiser
les dpassements lors des transitoires. Le choix devra se faire ensuite entre la complexit
supplmentaire du contrleur et lapport en terme de performance de contrle.
Pour le contrle LPV de la pression rail par lIMV seule, nous avons dni des pon-
drations frquentielles invariantes. Ainsi quel que soit le point de fonctionnement du
systme, nous demandons les mmes performances. Or nous savons que lorsque la de-
mande dinjection est faible, lIMV est faiblement ouverte et vice versa. Nanmoins la
demande dinjection nest pas un paramtre qui agit directement sur le comportement
dynamique du systme, mais un paramtre qui amne le systme un point de fonc-
tionnement donn et donc un certain comportement. La demande dinjection permet
donc de dnir de manire indirecte la position globale vers laquelle lIMV va tendre. Il
faut noter que cette relation est indirecte dans le sens o le changement de la position
de lIMV nest pas immdiat en fonction de la demande dinjection. Lide serait alors
dtudier la dnition de pondrations frquentielles LPV prenant en compte la demande
dinjection dans lobjectif de modier les performances du contrleur en fonction du point
de fonctionnement du moteur, et plus prcisment en fonction de la position de lIMV. La
26
le contrleur de pression par lIMV seule prend en compte galement la demande dinjection mais
cela nintervient pas dans le problme prsent
199
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
200 Chapitre 16. Perspectives
valeur du paramtre variant pris en compte dans la pondration devra tre la demande
dinjection ltre pour permettre au systme datteindre le point de fonctionnement et
ainsi appliquer la bonne commande au bon moment.
Pour viter les problmes de collage de lIMV nous avons propos une commande
bruite. Les essais raliss sur vhicule nont pas mis en vidence de problme li un
ventuel collage de lIMV. Le rsultat de cette solution est donc satisfaisant en terme de
contrle. Nanmoins en terme de produit, une excitation permanente de la commande
peut rduire prmaturment la dure vie de lactionneur. Une tude doit donc tre faite
sur deux points : tout dabord quelle est lexcitation minimale ncessaire pour empcher
que lIMV se colle en fonctionnement, et dautre part quelle est lexcitation maximale que
peut tolrer lIMV sans nuire sa durabilit.
Lintgration du contrleur dans lECU entrane des arrondis sur ses coecients et donc
des erreurs de calcul de la commande dues aux oprations ralises en virgule xe. Dans
nos travaux, nous nous sommes uniquement assurs dune part que chaque coecient
soit bien intgr aux erreurs darrondis prs, et dautre part que le rsultat de chaque
opration ne cre pas de dpassement li au codage
27
du nombre (p.e. lopration 5 10
cre un dpassement si le codage du rsultat est prvu pour un nombre allant de 0 32
et le nombre obtenu est alors inexploitable). Il est donc ncessaire de faire une analyse a
posteriori de lerreur engendre par la mise en oeuvre en virgule xe du contrleur dans
lECU pour garantir la stabilit et la robustesse en performances du systme.
La modlisation physique du systme a t faite au dbut des travaux partir dessais
sur des bancs lectriques et de mesures des caractristiques des composants (p.e. poids des
pices, raideur des ressorts, etc.). Lapplication de la commande partir de cette modli-
sation est eectue la n des travaux et sur un vhicule sur lequel nous navions pas fait
dessais auparavant. La commande dveloppe prsente donc une certaine robustesse pr-
sent dans le chapitre de la commande de lIMV. Nanmoins le systme prsente un faible
vieillissement, seulement plusieurs mois. Il faudrait donc faire une tude de lvolution des
caractristiques de chaque lment du systme sur une longue dure de fonctionnement
pour dnir la variation que peut subir le systme en termes de comportement an dtre
toujours en mesure de garantir la robustesse et les performances du systme.
Le modle thorique dvelopp dans ces travaux a t utilis uniquement pour lla-
boration de lois de commande. Au vue des rsultats lis la modlisation, nous pouvons
envisager dutiliser le modle du systme pour eectuer du diagnostic, i.e. dtection et
localisation dun dfaut (p.e. blocage dun actionneur, drive du capteur de pression, etc)
et prendre des dcisions sur le contrle du systme vis--vis dune ventuelle panne.
27
i.e. le nombre de bits pour la partie entire et la partie dcimale
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
Bibliographie
[1] Kristina Ahlin. Modelling of pressure waves in the Common Rail Diesel Injection
System. PhD thesis, Linkpings Universitet, SE-581 83 Linkping, 2000.
[2] ANFR. Linjection diesel haute pression rampe commune. Dossier technique
A.N.F.A., Edition 2001, 2001.
[3] A. Balluchi, A. Bicchi, E. Mazzi, A. L. Sangiovanni Vincentelli, and G. Serra. Hy-
brid modelling and control of the common rail injection system. Hybrid Systems :
Computation and Control, pages 7992, 2006.
[4] J.M. Biannic. Commande robuste des systmes paramtres variables. PhD thesis,
SUPAERO, 1996.
[5] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan. Linear Matirx Inequalities in
Systems and Control Theory. PA, SIAM, Philadelphia, 1994.
[6] Jonathan Chauvin. Estimation et contrle dun moteur HCCI. Estimation des sys-
tmes priodiques. PhD thesis, Ecole des Mines de Paris, ENSMP, 2006.
[7] Mac Cloy D. and Martin H.R. Control of Fluid Power : Analysis and Design. 2d
Edition, John Wiley and Sons, 1980.
[8] Dominique de Savigny. Electroaimants de commande. Technique de lIngnieur,
D835_3_1983, 1983.
[9] Logiciel de simulation AMESim. IMAGINE, www.amesim.com.
[10] Marco Dettori. LMI techniques for control, with application to a Compact Disc player
mechanism. PhD thesis, TUDelft, 2001.
[11] Leith D.J. and Leithead W.E. Appropriate realisation of mimo gain-scheduled
controllers. International Journal of Control, Colume 70, Number 1, pp. 13-50, 1998.
[12] J.C. Doyle, K Glover, Khargonekar P.P., and B.A. Francis. State space solutions to
standard and control problems. IEEE Transaction On Automatic Control, 34, 1989.
[13] Pierre Dupraz. Modlisation et commande avances dun moteur diesel injection
directe. PhD thesis, Laboratoire dAutomatique de Grenoble - Lucas Varity, 1998.
[14] S. Font. Mthodologie pour prendre en compte la robustesse des systmes asservis :
optimisation H
et approche symbolique de la forme standard. PhD thesis, Universit
Parix XI Orsay, France, 1995.
[15] Duc G. Commande H
et -analyse : des outils pour la robustesse. Herms, 1999.
[16] M. Gafvert. Comparison of two Friction Models. PhD thesis, Lund University of
Technology, 1996.
201
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
202 Bibliographie
[17] Pascal Gahinet and Apkarian Pierre. A convex characterization of gain-scheduled
H
controllers. IEEE Transaction On Automatic Control, 40, 1995.
[18] B. Armonstrong Hlouvry. Control of Machines with Friction. Kluwer Academic,
1991.
[19] L Lennart. System Identifcation : Theory for the user. Prentice Hall, 1999.
[20] Jung M. Mean-Value Modelling and Robust Control of the Airpath of a Turbocharged
Diesel Engine. PhD thesis, University of Cambridge, 2003.
[21] Andy Packard. Gain scheduling via linear fractional transformations. Systems &
Control Letters, 1994.
[22] Gahinet Pascal and Apkarian Pierre. A linear matrix inequality approach to H
control. Int. J. Robust and Nonlinear Contr., 4, 1994.
[23] Skogestad S. and Postlethwaite I. Multivariable Feedback Control. John Wiley and
Sons Chischester, 1996.
[24] J-H. Kim S-W. Lee. Robust adaptative stick-slip friction compensation. IEEE Tran-
sactions on industrial electronics, vol. 42 no. 5, 1995.
[25] C.R. MacCluer S.C. Southward, C.J. Radclie. Robust nonlinear stick-slip friction
compensation. Journal of Dynamic Systems, Measurment and Control, 1991.
[26] C. Scherer and S. Weiland. Linear matrix inequalities in control. Technical report,
Delft Center for Systems and Control (Delft University of Technology) and Depart-
ment of Electrical Engineering (Eindhoven University of Technology), 2004.
[27] Carsten Scherer. The riccati inequality and state-space H
-optimal control. PhD
thesis, University Wurzburg, Germany, 1990.
[28] G. Scorletti and V. Fromion. Introduction la commande multivariable des systmes :
mthodes de synthse frquentielle H
. Polycopi Universit ENSI/Caen disponible
sur http// :www.greyc.ismra.fr/LAP/Gerard_S/ENSI_comrob.html, 2001.
[29] Rugh W.J. and Shamma J.S. A survey of research on gain scheduling. Automatica,
36 (10), pp. 665-671, 2000.
[30] G. Zames. Feedback and optimal sensitivity : Model reference transformation, mul-
tiplicative seminorms, and approximate inverses. IEEE Transaction On Automatic
Control, 1981.
[31] Kemin Zhou and Doyle John C. Essential of robust control. Prentice Hall, 1997.
[32] Alessandro Zin. Sur la commande robsute de suspensions automobiles en vue du
contrle global de chassis. PhD thesis, Laboratoire dAutomatique de Grenoble, 2006.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
A
Systme LFT (P, K) en boucle ferme
La sortie y du systme P scrit comme suit :
y = C
2
x
k
+ D
2
+ D
21
(A.1)
Le calcul de la commande u du contrleur donne donc :
u = C
k1
x
c
k
+ D
11
y + D
k1
(A.2)
u = C
k1
x
c
k
+ D
k11
C
2
x
k
+ D
k11
D
2
+ D
k11
D
21
+ D
k1
Il sut prsent dutiliser la valeur de la commande dans les dirents tats et sorties
du systme pour obtenir le systme en boucle ferme.
_
_
_
_
_
_
x
k+1
x
c
k+1
q
c
q
_
_
_
_
_
_
=
_
_
_
_
_
_
A+ B
2
D
k11
C
2
B
2
C
k1
B
2
D
k1
B
+ B
2
D
k11
D
2
B
1
+ B
2
D
k11
D
21
B
k1
C
2
A
k
B
k
B
k1
D
2
B
k1
D
21
D
k1
C
2
C
k
D
k
D
k1
D
2
D
k1
D
21
C
+ D
2
D
k11
C
2
D
2
C
k1
D
2
D
k1
D
+ D
2
D
k11
D
2
D
1
+ D
2
D
k11
D
21
C
1
+ D
12
D
k11
C
2
D
12
C
k1
D
12
D
k1
D
1
+ D
12
D
k11
D
2
D
11
+ D
12
D
k11
D
21
_
_
_
_
_
_
_
_
_
_
_
_
x
k
x
c
k
_
_
_
_
_
_
(A.3)
Ce qui peut donc scrire comme suit :
_
x
k+1
q
_
=
_
A
cl
B
cl
C
cl
D
cl
__
x
k
w
_
(A.4)
En utilisant la structure du contrleur (eq. 11.19), les matrices A
cl
, B
cl
, C
cl
et D
cl
peuvent
scrire de la manire suivante :
203
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
204 Annexe A. Systme LFT (P, K) en boucle ferme
A
cl
=
_
A+ B
2
D
k11
C
2
B
2
C
k1
B
k1
C
2
A
k
_
(A.5)
=
_
A 0
0 0
_
+
_
B
2
D
k11
C
2
B
2
C
k1
B
k1
C
2
A
k
_
=
_
A 0
0 0
_
+
_
0 B
2
0
I 0 0
_
+
_
_
0 I
C
2
0
0 0
_
_
=
A+
B
2
C
2
(A.6)
B
cl
=
_
B
2
D
k1
B
+ B
2
D
k11
D
2
B
1
+ B
2
D
k11
D
21
B
k
B
k1
D
2
B
k1
D
21
_
(A.7)
=
_
0 B
B
1
0 0 0
_
+
_
B
2
D
k1
B
2
D
k11
D
2
B
2
D
k11
D
21
B
k
B
k1
D
2
B
k1
D
21
_
=
_
0 B
B
1
0 0 0
_
+
_
0 B
2
0
I 0 0
_
+
_
_
0 0 0
0 D
2
D
21
I 0 0
_
_
=
B
1
+
B
2
D
21
(A.8)
C
cl
=
_
_
D
k1
C
2
C
k
C
+ D
2
D
k11
C
2
D
2
C
k1
C
1
+ D
2
D
k11
C
2
D
12
C
k1
_
_
(A.9)
=
_
_
0 0
C
0
C
1
0
_
_
+
_
_
D
k1
C
2
C
k
D
2
D
k11
C
2
D
2
C
k1
D
2
D
k11
C
2
D
12
C
k1
_
_
=
_
_
0 0
C
0
C
1
0
_
_
+
_
_
0 0 I
0 D
2
0
0 D
12
0
_
_
+
_
_
0 I
C
2
0
0 0
_
_
=
C
1
+
D
12
C
2
(A.10)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
205
D
cl
=
_
_
D
k
D
k1
D
2
D
k1
D
21
D
2
D
k1
D
+ D
2
D
k11
D
2
D
1
+ D
2
D
k11
D
21
D
12
D
k1
D
1
+ D
12
D
k11
D
2
D
11
+ D
12
D
k11
D
21
_
_
(A.11)
=
_
_
0 0 0
0 D
D
1
0 D
1
D
11
_
_
+
_
_
D
k
D
k1
D
2
D
k1
D
21
D
2
D
k1
D
2
D
k11
D
2
D
2
D
k11
D
21
D
12
D
k1
D
12
D
k11
D
2
D
12
D
k11
D
21
_
_
=
_
_
0 0 0
0 D
D
1
0 D
1
D
11
_
_
+
_
_
0 0 I
0 D
2
0
0 D
12
0
_
_
+
_
_
0 0 0
0 D
2
D
21
I 0 0
_
_
=
D
11
+
D
12
D
21
(A.12)
Ainsi, le systme boucl scrit sous la forme suivante :
_
x
k+1
q
_
=
_
A+
B
2
C
2
B +
B
2
D
21
C +
D
12
C
2
D +
D
12
D
21
__
x
k
w
_
(A.13)
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
206 Annexe A. Systme LFT (P, K) en boucle ferme
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
I N S T I T U T N A T I O N A L P O L Y T E C H N I Q U E D E G R E N O B L E
E C O L E N A T I O N A L E S U P E R I E U R E D ' I N G E N I E U R S E L E C T R I C I E N S D E G R E N O B L E
Laboratoire d'Automatique de Grenoble - ENSIEG , Rue de la Houille Blanche, BP46, 38 402 SAINT MARTIN D'HERES CEDEX, FRANCE
Tl 33 (0)4 76 82 62 44, Tlcopie 33 (0)4 76 82 63 88, E.Mail lag@lag.ensieg.fr
Laboratoire d'Automatique
de Grenoble
Unit Mixte de Recherche CNRS 5528
associe l'universit Joseph Fourier
Rsum : Les normes sur les missions de polluants des automobiles sont de plus en plus svres. Les
moteurs injection directe rampe commune permettent d'atteindre ces exigences notamment grce
l'injection du carburant trs haute pression. Cette pression varie de 200 1600 bar selon le point de
fonctionnement du vhicule. L'objectif des travaux de thse est de raliser le contrle de la pression du
carburant avec deux contraintes principales : proposer une mthodologie de calibration du contrleur partir
des caractristiques techniques du systme d'injection et amliorer la fois la performance et la robustesse
du contrle. Les travaux raliss se dcomposent comme suit : tude du systme d'injection et
dveloppement d'un modle de connaissance ; dveloppement des stratgies et des lois de commande ;
mise en application sur vhicule. Les essais raliss sur vhicule ont montr une amlioration des
performances et de la robustesse du contrle de la pression du carburant obtenue par la proposition d'une
nouvelle mthodologie de calibration. Celle-ci est base par l'obtention du contrleur partir des
caractristiques techniques du systme d'injection et par l'utilisation de lois de commande avances
(commande H
pour les systmes Linaires Paramtres Variants (LPV)). En particulier lapproche base
sur lutilisation des Transformations Linaires Fractionnelles (LFT) a t considre.
Mots-Clefs: Contrle moteur, modlisation systme d'injection, contrle multivariable, synthse H
LFT.
Abstract: Vehicle exhaust emissions are today more and more restrictive. Common Rail engines allow to
reach these requirements thanks to the high pressure injection. This pressure can vary from 200 up to 1600
bar according to the engine torque and speed. The goal of this work is to define the rail pressure controller
based on the Common Rail features and to improve performance and robustness. Works have been done as
follows: study of the Common Rail system and development of the physical model ; development of
strategies and command laws ; real tests on vehicle. Vehicle tests showed a high improvement on
performance and robustness thanks to the new methodology based on the Common Rail features and the
advanced command laws (H
control for Linear Parameter Varying systems). In particular the Linear
Fractional Transformation (LFT) approach has been considered.
Keywords: Engine control, injection system modeling, multivariable control, LFT H
synthesis.
t
e
l
-
0
0
2
0
7
8
7
5
,
v
e
r
s
i
o
n
1
-
1
8
J
a
n
2
0
0
8
You might also like
- ET851Document3 pagesET851Sofiane HalimiNo ratings yet
- 6-Cc2suj Version2Document3 pages6-Cc2suj Version2Sofiane HalimiNo ratings yet
- FR TwinPump 493490225 V01 0710Document2 pagesFR TwinPump 493490225 V01 0710Sofiane HalimiNo ratings yet
- 6-Cc2cor Version2Document5 pages6-Cc2cor Version2Sofiane Halimi100% (1)
- Prima GNLDocument0 pagesPrima GNLSofiane HalimiNo ratings yet
- Info Iec61064 (Ed1.0) B.imgDocument9 pagesInfo Iec61064 (Ed1.0) B.imgSofiane HalimiNo ratings yet
- Flyer Hydropower A4 FRDocument4 pagesFlyer Hydropower A4 FRSofiane HalimiNo ratings yet
- Relations Internationales 9Document2 pagesRelations Internationales 9Sofiane HalimiNo ratings yet
- Le Raffinage PétrolierDocument65 pagesLe Raffinage Pétroliermechergui100% (13)
- Condition Et DeclarationDocument2 pagesCondition Et DeclarationdeezedNo ratings yet
- GT CogenerationDocument16 pagesGT CogenerationSofiane HalimiNo ratings yet
- La Formation de Base Pour Devenir SPV V2Document4 pagesLa Formation de Base Pour Devenir SPV V2Sofiane HalimiNo ratings yet
- Bacc Service Social Cheminement Decbacc2 AnsDocument1 pageBacc Service Social Cheminement Decbacc2 AnsSofiane HalimiNo ratings yet
- CZV2011 FRDocument5 pagesCZV2011 FRSofiane HalimiNo ratings yet
- Partenariat Operation MotoDocument2 pagesPartenariat Operation MotoSofiane HalimiNo ratings yet
- Unites Formation CapashDocument1 pageUnites Formation CapashSofiane HalimiNo ratings yet
- Word - Numéroter Les Lignes D'un TexteDocument3 pagesWord - Numéroter Les Lignes D'un TexteJL Kpodar - Emotice.frNo ratings yet
- Terciane Devis OptiqueDocument1 pageTerciane Devis OptiqueSofiane HalimiNo ratings yet
- Article A5199Document6 pagesArticle A5199Sofiane HalimiNo ratings yet
- Optique Geometrique Matricielle Interferences DiffractionDocument0 pagesOptique Geometrique Matricielle Interferences DiffractionSofiane HalimiNo ratings yet
- Fiche MesureDocument3 pagesFiche MesureSofiane HalimiNo ratings yet
- Ma LettreDocument2 pagesMa LettreSofiane HalimiNo ratings yet
- PDF Imagerie Optique1Document3 pagesPDF Imagerie Optique1Sofiane HalimiNo ratings yet
- 37990Document2 pages37990Sofiane HalimiNo ratings yet
- Fem J1405Document3 pagesFem J1405Sofiane HalimiNo ratings yet
- Monument DocumentDocument11 pagesMonument DocumentSofiane HalimiNo ratings yet
- Livret Tout Savoir Sur La Fibre OptiqueDocument8 pagesLivret Tout Savoir Sur La Fibre OptiqueSofiane HalimiNo ratings yet
- Fiches D3 v1 0 20111020Document44 pagesFiches D3 v1 0 20111020Sofiane HalimiNo ratings yet
- Liste Justificatifs Demande RetraiteDocument1 pageListe Justificatifs Demande RetraiteSofiane HalimiNo ratings yet
- Documents ArchivesDocument3 pagesDocuments ArchivesSofiane HalimiNo ratings yet
- Ds Topographie 1GC Iset Nabeul 2012Document3 pagesDs Topographie 1GC Iset Nabeul 2012Soulaima Seddiki100% (1)
- Bu 3 Flambage v2Document5 pagesBu 3 Flambage v2Klolay Bledja Cyntiche AllaNo ratings yet
- 4 Formule BruteDocument2 pages4 Formule BruteNajib Nouisser100% (2)
- DT SB V3-Parfum Fr-Lazer Rev A.1Document8 pagesDT SB V3-Parfum Fr-Lazer Rev A.1Jan OlivierNo ratings yet
- Lettre Motivation Dut Informatique 5Document2 pagesLettre Motivation Dut Informatique 5Stephane LoeNo ratings yet
- TL TD02Document2 pagesTL TD02NoureddineRmilaNo ratings yet
- Haute Disponibilité Avec Partage de Charge PDFDocument24 pagesHaute Disponibilité Avec Partage de Charge PDFMarouani AmorNo ratings yet
- Tunnel - 4 Note de Calcul PDFDocument56 pagesTunnel - 4 Note de Calcul PDFGhani LrNo ratings yet
- Valorisation Des Fibres de Kénaf Dans Des Applications Textiles Et ParatextilesDocument153 pagesValorisation Des Fibres de Kénaf Dans Des Applications Textiles Et Paratextilesserhrouchni nourelhoudaNo ratings yet
- Corrige Serie3 PDFDocument5 pagesCorrige Serie3 PDFMohamedDokse0% (1)
- Abs R19 16SDocument5 pagesAbs R19 16SHichamRabaneNo ratings yet
- RapportDocument5 pagesRapportAnas OuarbyaNo ratings yet
- Colle Pour Carreaux de Plâtre PF 3 SINIAT, 5 KG Leroy MerlinDocument1 pageColle Pour Carreaux de Plâtre PF 3 SINIAT, 5 KG Leroy MerlinClaudiuNo ratings yet
- PresseDocument70 pagesPresseMalcolm EmileNo ratings yet
- Document RéponseDocument9 pagesDocument RéponseOxitrone [ӾøŁ]No ratings yet
- Circuit Electrique Dun Bruleur A Air SouffleDocument8 pagesCircuit Electrique Dun Bruleur A Air Soufflelyoussimosab2003No ratings yet
- TP TalendDocument29 pagesTP TalendKawtarSolo100% (2)
- FICHE TD Etat MoteurDocument12 pagesFICHE TD Etat MoteurFakhreddine Ben MhenniNo ratings yet
- D 19 Wide p4x2 Bom 320e6Document8 pagesD 19 Wide p4x2 Bom 320e6El Mehdi JeddadNo ratings yet
- Mon GPS en ActionDocument296 pagesMon GPS en ActionnasrudineNo ratings yet
- Extrait 42150210 PDFDocument91 pagesExtrait 42150210 PDFRabii Monta100% (1)
- These Dupuy 2008Document203 pagesThese Dupuy 2008Jihen BoukadidaNo ratings yet
- ANALYSE GRANULOMETRIQUE PAR TAMISAG1 CopDocument4 pagesANALYSE GRANULOMETRIQUE PAR TAMISAG1 Copkerkeni azizNo ratings yet
- La Toiture VégétaliséeDocument4 pagesLa Toiture Végétaliséeglynis100% (1)
- Martin LudovicDocument54 pagesMartin LudovicLoubna MiageNo ratings yet
- Rapport Devoir 2Document8 pagesRapport Devoir 2line caulfutyNo ratings yet
- SchematisationDocument16 pagesSchematisationfaridNo ratings yet
- SDM TPDocument7 pagesSDM TPGOUAL SaraNo ratings yet
- Stage RachedDouahchia PDFDocument4 pagesStage RachedDouahchia PDFRached DouahchuaNo ratings yet
- Document 11Document10 pagesDocument 11JamseNo ratings yet