You might also like
- John Deere Tractors 5303/5403/5503 - EEXDocument3 pagesJohn Deere Tractors 5303/5403/5503 - EEXelipholeb100% (4)
- Planetary Gear Unit: - Major Difference Between U250E Automatic Transaxle and U241E Automatic TransaxleDocument6 pagesPlanetary Gear Unit: - Major Difference Between U250E Automatic Transaxle and U241E Automatic TransaxlegabotoyoNo ratings yet
- Ball Traction Drive - FinalDocument46 pagesBall Traction Drive - FinalTejas Shete0% (1)
- 507 Mechanical Movements: Mechanisms and DevicesFrom Everand507 Mechanical Movements: Mechanisms and DevicesRating: 4 out of 5 stars4/5 (28)
- Yamaha Alba PDFDocument11 pagesYamaha Alba PDFJawale Chetan100% (2)
- Lubricants & Coolant: FluidsDocument8 pagesLubricants & Coolant: FluidsPHÁT NGUYỄN THẾ100% (1)
- MDSP Set 2Document9 pagesMDSP Set 2iaton77100% (2)
- DIN-58405-3-1972 Spur Gear Drives For Fine Mechanics - Indication in Drawings, Examples For Calculation PDFDocument20 pagesDIN-58405-3-1972 Spur Gear Drives For Fine Mechanics - Indication in Drawings, Examples For Calculation PDFthaivinhtuyNo ratings yet
- Chapter 2-Gear SystemDocument26 pagesChapter 2-Gear SystemNui Yuhu KuwNo ratings yet
- Gears & Gear Manufacturing Processes-2Document58 pagesGears & Gear Manufacturing Processes-2Yogesh DewangNo ratings yet
- Rack and Pinion Gears InformationDocument6 pagesRack and Pinion Gears InformationifyNo ratings yet
- Gear CorrectionDocument17 pagesGear CorrectionMurugesanNo ratings yet
- Spur and Helical Gear Modeling in Pro-EDocument13 pagesSpur and Helical Gear Modeling in Pro-Ek_udhay100% (1)
- Precision Involute Gear Hob DesignDocument11 pagesPrecision Involute Gear Hob DesignKalyan ChakravarthyNo ratings yet
- Reverse Engineering of Spur GearDocument4 pagesReverse Engineering of Spur GearInaamNo ratings yet
- Final ReportDocument45 pagesFinal ReportKuppu Raj100% (1)
- GEAR TOOTH PROFILESDocument5 pagesGEAR TOOTH PROFILESpremnathgopinathanNo ratings yet
- Gears: A Gear Is A Wheel With Teeth On Its Outer Edge. The Teeth of One Gear Mesh (Or Engage) With The Teeth of AnotherDocument12 pagesGears: A Gear Is A Wheel With Teeth On Its Outer Edge. The Teeth of One Gear Mesh (Or Engage) With The Teeth of AnotherAniruddh SinghNo ratings yet
- Gear IntroductionDocument17 pagesGear Introductionpatel ketan100% (1)
- Draw The Cam Profile For Following ConditionsDocument3 pagesDraw The Cam Profile For Following ConditionsmaloyNo ratings yet
- Gear Tester, Gear Measuring Machines, Gear Inspection MachinesDocument8 pagesGear Tester, Gear Measuring Machines, Gear Inspection MachinesPramod Patil100% (1)
- Spindle Speed MechanismsDocument4 pagesSpindle Speed MechanismsGomathi SankarNo ratings yet
- Measurements & Metrology (English)Document29 pagesMeasurements & Metrology (English)Kumar SubramanianNo ratings yet
- Ansi Agma 2000 A88Document4 pagesAnsi Agma 2000 A88MickloSoberanNo ratings yet
- Surface Roughness TesterDocument8 pagesSurface Roughness TesterAniketGunjalNo ratings yet
- Effect of Increased Center Distance on Gear Teeth Contact Ratio and StressDocument21 pagesEffect of Increased Center Distance on Gear Teeth Contact Ratio and StressDavide MaranoNo ratings yet
- Manufacturing of Spur Gear: Aim of The ExperimentDocument5 pagesManufacturing of Spur Gear: Aim of The ExperimentParameshwara MeenaNo ratings yet
- Name: Roll No: AssignmentDocument6 pagesName: Roll No: Assignmentigualdi53No ratings yet
- Unit - V: Manufacturing TechnologyDocument54 pagesUnit - V: Manufacturing TechnologyIjanSahrudinNo ratings yet
- Bevel GearDocument9 pagesBevel GearAadil KhanNo ratings yet
- Gear Terminology: Pitch Circle: Addendum Circle: Dedendum Circle: ClearanceDocument11 pagesGear Terminology: Pitch Circle: Addendum Circle: Dedendum Circle: ClearanceFawad HassanNo ratings yet
- GearsDocument20 pagesGearsFarhad Noruzi100% (14)
- Backlash Analysis of a New Planetary GearingDocument8 pagesBacklash Analysis of a New Planetary GearingSerkanNo ratings yet
- CH 13Document27 pagesCH 13Sanjay KumarNo ratings yet
- Cycloid Drive - Replaced by Planocentric Involute GearingDocument6 pagesCycloid Drive - Replaced by Planocentric Involute GearingMax GrandeNo ratings yet
- Gear Terminology and Its Types: Pitch CircleDocument6 pagesGear Terminology and Its Types: Pitch CircleMuhammad UmerNo ratings yet
- Gear TrainDocument26 pagesGear TraingowthamarajNo ratings yet
- Power Transmission - Gear - Types of Gears - Nomenclature - Applications of Gears - Velocity Ratio - Gear Trains - Example Problems and QuestionsDocument26 pagesPower Transmission - Gear - Types of Gears - Nomenclature - Applications of Gears - Velocity Ratio - Gear Trains - Example Problems and QuestionsNirav PanchalNo ratings yet
- Involute Spur Gear ProblemsDocument6 pagesInvolute Spur Gear ProblemsChiragJansari100% (1)
- Module IV: Gears and Gear TrainsDocument38 pagesModule IV: Gears and Gear TrainsSuraj VinayNo ratings yet
- Elementary Transmission For Transforming Rotary Into Translatory MotionDocument14 pagesElementary Transmission For Transforming Rotary Into Translatory Motionshreyas jadhavNo ratings yet
- 02 Coordinate SystemsDocument2 pages02 Coordinate Systemskhiladi2No ratings yet
- Cam Jump Phenomenon-1Document10 pagesCam Jump Phenomenon-1Dhairyasheel Bhutkar100% (1)
- Gear Tooth ThicknessDocument15 pagesGear Tooth Thicknessramana4u_iitmNo ratings yet
- Gear DesignDocument5 pagesGear DesignKrishnadev Madhavan NairNo ratings yet
- L Gear TrainsDocument88 pagesL Gear TrainsAditya Shubham Garg100% (1)
- Profile CalculationDocument13 pagesProfile CalculationAtsis PapadopoulosNo ratings yet
- Dynamic Force Analysis ProblemsDocument8 pagesDynamic Force Analysis Problemsa c s KumarNo ratings yet
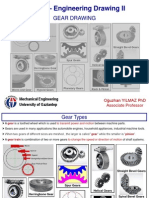
- ME 114 Engineering Drawing II Gear DrawingDocument12 pagesME 114 Engineering Drawing II Gear Drawingpradeep315No ratings yet
- Gear TrainDocument16 pagesGear Trainmudassir habibNo ratings yet
- Kinematics of Shaper MachineDocument30 pagesKinematics of Shaper Machinemanas mohanty100% (1)
- 4 Dtic: Reliability and Life Prediction Methodology M60 Torsion BarsDocument60 pages4 Dtic: Reliability and Life Prediction Methodology M60 Torsion BarsTabiXh AahilNo ratings yet
- Designing Gear in Catia V5R14 HowtoDocument90 pagesDesigning Gear in Catia V5R14 HowtoArjun100% (4)
- Shift and Select MechanismDocument7 pagesShift and Select MechanismDwi UpariadiNo ratings yet
- Gear Box TypesDocument4 pagesGear Box TypespenihaniNo ratings yet
- Assignment 3Document20 pagesAssignment 3Siddhesh RaulNo ratings yet
- 2 Gear BasicsDocument6 pages2 Gear BasicsMohamed Adel RizkNo ratings yet
- Spur Gear Theory and Design: Soumitra Bhattacharya, M.Tech (Mech), Professional Member of ASMEDocument16 pagesSpur Gear Theory and Design: Soumitra Bhattacharya, M.Tech (Mech), Professional Member of ASMESyed Shoaib RazaNo ratings yet
- Planer Quick Return MechanismDocument21 pagesPlaner Quick Return MechanismchristadcrNo ratings yet
- Types of GearsDocument5 pagesTypes of GearsKarthikNo ratings yet
- Type of GearsDocument6 pagesType of Gearskamalezwan100% (1)
- Types of GearDocument6 pagesTypes of GearMira EvaNo ratings yet
- GearsDocument110 pagesGearsBujjibabu KattaNo ratings yet
- Gear KnowledgeDocument24 pagesGear KnowledgebabublsNo ratings yet
- Thesis report (1)Document72 pagesThesis report (1)Mayur ShetNo ratings yet
- I ST IA FTDocument2 pagesI ST IA FTSantosh GoudarNo ratings yet
- 670205Document9 pages670205Santosh GoudarNo ratings yet
- Alva'S Institute of Engineering and Technology Department of Mechanical Enginrring I' Engineering (10EME24)Document1 pageAlva'S Institute of Engineering and Technology Department of Mechanical Enginrring I' Engineering (10EME24)Santosh GoudarNo ratings yet
- Manohar Pattar:: Sankappa::::: 1 Year Bachelor in Education (B.Ed) 110068 2011 100991119 72.00 PassedDocument2 pagesManohar Pattar:: Sankappa::::: 1 Year Bachelor in Education (B.Ed) 110068 2011 100991119 72.00 PassedSantosh GoudarNo ratings yet
- Microstructure and Mechanical Properties of Spray Deposited Hypoeutectic Al-Si AlloyDocument4 pagesMicrostructure and Mechanical Properties of Spray Deposited Hypoeutectic Al-Si AlloySantosh GoudarNo ratings yet
- ECE Lab Internal MarksDocument3 pagesECE Lab Internal MarksSantosh GoudarNo ratings yet
- Squeeze CastingDocument27 pagesSqueeze CastingSantosh GoudarNo ratings yet
- Mechanics of Materials VTU Exam Questions 2007-2014Document2 pagesMechanics of Materials VTU Exam Questions 2007-2014Santosh GoudarNo ratings yet
- 1sqezze Cast3Document8 pages1sqezze Cast3Santosh GoudarNo ratings yet
- Receipt 888903009283Document1 pageReceipt 888903009283Santosh GoudarNo ratings yet
- ClutchesDocument5 pagesClutchesSantosh GoudarNo ratings yet
- Alva'S Institute of Engineering and Technology Department of Mechanical EngineeringDocument1 pageAlva'S Institute of Engineering and Technology Department of Mechanical EngineeringSantosh GoudarNo ratings yet
- ECE Lab Internal MarksDocument3 pagesECE Lab Internal MarksSantosh GoudarNo ratings yet
- 10me53 - Energy EngineeringDocument3 pages10me53 - Energy EngineeringSantosh GoudarNo ratings yet
- CH 3sDocument67 pagesCH 3sSantosh GoudarNo ratings yet
- Ansys WB Fatigue AnalysisDocument81 pagesAnsys WB Fatigue Analysisprajash007100% (1)
- Block Diagram of 8085.PDF ImpDocument32 pagesBlock Diagram of 8085.PDF ImpKRISHNAVINODNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentSantosh GoudarNo ratings yet
- CRV 2Document1 pageCRV 2Santosh GoudarNo ratings yet
- 3rd To 7th Sem Master TimeTableDocument8 pages3rd To 7th Sem Master TimeTableSantosh GoudarNo ratings yet
- The IC EngineDocument14 pagesThe IC EngineShyamendra KushwahaNo ratings yet
- Request For Original Marks Card1Document1 pageRequest For Original Marks Card1Santosh GoudarNo ratings yet
- An MLX75308 - System DesignDocument14 pagesAn MLX75308 - System DesignSantosh GoudarNo ratings yet
- Final Manual Edited PramodDocument37 pagesFinal Manual Edited PramodSantosh GoudarNo ratings yet
- 3 D ElasticityDocument40 pages3 D ElasticitySantosh GoudarNo ratings yet
- Gate 2013 SyllabusDocument2 pagesGate 2013 SyllabusSantosh GoudarNo ratings yet
- Thermal Energy 12202Document45 pagesThermal Energy 12202Santosh GoudarNo ratings yet
- IEEE Paper FormatDocument4 pagesIEEE Paper Formattejas24No ratings yet
- 4al10cv041 Shahanas TDocument1 page4al10cv041 Shahanas TSantosh GoudarNo ratings yet
- Spare Parts Manual: Engine: ART - NO.: 3CM089308HENDocument28 pagesSpare Parts Manual: Engine: ART - NO.: 3CM089308HENcharlesNo ratings yet
- LLoyds Register Rules and RegulationsDocument20 pagesLLoyds Register Rules and RegulationsRPDeshNo ratings yet
- (AGMA) Publications Catalog August 2017Document110 pages(AGMA) Publications Catalog August 2017mostafa asemaniNo ratings yet
- ST-124 New Gear Train PDFDocument21 pagesST-124 New Gear Train PDFPopa MihaiNo ratings yet
- Gear BoxDocument36 pagesGear BoxNimoNo ratings yet
- Optimize Final Drive Assembly GuideDocument9 pagesOptimize Final Drive Assembly Guidemrcruzito_2099100% (1)
- Man GN PDF 6Document36 pagesMan GN PDF 6Adrian A UPD78% (9)
- Maintenance Manual: SeriesDocument196 pagesMaintenance Manual: SeriesCergeyNo ratings yet
- Mirpur University of Science & Technology: Project Title Fabrication of Submarine ModelDocument9 pagesMirpur University of Science & Technology: Project Title Fabrication of Submarine Modeljwpaprk1No ratings yet
- VIRTUAL BAJA SAEINDIA 2015 DESIGN PRESENTATIONDocument12 pagesVIRTUAL BAJA SAEINDIA 2015 DESIGN PRESENTATIONgoldencomet100% (1)
- Yale GlobalKing LineCatalog YGKB-1214 WEBDocument20 pagesYale GlobalKing LineCatalog YGKB-1214 WEBJESUSCALVILLONo ratings yet
- Yamaha YZF-R6 2016 Gytr Kitmanual EUDocument67 pagesYamaha YZF-R6 2016 Gytr Kitmanual EUHenrik FalkNo ratings yet
- Axsm00570109 PDFDocument90 pagesAxsm00570109 PDFRandy Staemly Marcella PacificoNo ratings yet
- Underground Motor Grader: BG 110-M MiningDocument8 pagesUnderground Motor Grader: BG 110-M MiningBBBBBBNo ratings yet
- Predicting Remaining Life by Fusing The Physics of Failure Modeling With Diagnostics PDFDocument7 pagesPredicting Remaining Life by Fusing The Physics of Failure Modeling With Diagnostics PDFPradeep KunduNo ratings yet
- PUB002-006-00 - 0516 RCL IQTF Flyer PDFDocument8 pagesPUB002-006-00 - 0516 RCL IQTF Flyer PDFabdur rahmanNo ratings yet
- Idler Gear - Remove and InstallDocument5 pagesIdler Gear - Remove and InstallCamila Vasques Quispe100% (1)
- Measurement TECHS For The Cement Industry 03Document50 pagesMeasurement TECHS For The Cement Industry 03Sudheer NairNo ratings yet
- Tractor TransmissionDocument6 pagesTractor TransmissionParminder ParryNo ratings yet
- GL XX Primetals Gear Oil SeriesDocument3 pagesGL XX Primetals Gear Oil SeriesChérubinNo ratings yet
- Rotork CMA50Document62 pagesRotork CMA50Doc_LAC100% (1)
- Drive Lines, Differentials, and Power TrainsDocument44 pagesDrive Lines, Differentials, and Power TrainsAnonymous QiMB2lBCJLNo ratings yet
- PSC Oilfield Lubrication RangeDocument27 pagesPSC Oilfield Lubrication RangeProject Sales CorpNo ratings yet
- Model 3150 Downflow Installation InstructionsDocument32 pagesModel 3150 Downflow Installation InstructionsWattsNo ratings yet
- CASE 1190 Shop ManualDocument23 pagesCASE 1190 Shop ManualRytis SiaulysNo ratings yet