You might also like
- Introduction To ROBOTICS: Velocity Analysis JacobianDocument32 pagesIntroduction To ROBOTICS: Velocity Analysis Jacobianal7123No ratings yet
- CCNY Robotics Lecture on Inverse Kinematics, Jacobian Matrix and Trajectory PlanningDocument34 pagesCCNY Robotics Lecture on Inverse Kinematics, Jacobian Matrix and Trajectory PlanningMohammad Emran RusliNo ratings yet
- Introduction To ROBOTICS: Inverse Kinematics Jacobian Matrix Trajectory PlanningDocument34 pagesIntroduction To ROBOTICS: Inverse Kinematics Jacobian Matrix Trajectory PlanningChernet TugeNo ratings yet
- Understanding Cryptography SOLUTIONSDocument26 pagesUnderstanding Cryptography SOLUTIONSzumri82% (17)
- Programs in FortranDocument12 pagesPrograms in FortranAnil Pal100% (1)
- Chapter 4 Randomized Blocks, Latin Squares, and Related DesignsDocument34 pagesChapter 4 Randomized Blocks, Latin Squares, and Related DesignsBalaji GaneshNo ratings yet
- Chap 1 Preliminary Concepts: Nkim@ufl - EduDocument20 pagesChap 1 Preliminary Concepts: Nkim@ufl - Edudozio100% (1)
- JacobianDocument32 pagesJacobianAniqua Ali100% (1)
- A New Class of Binary Zero Correlation Zone Sequence Sets: B. Fassi, A. Djebbari, Taleb-Ahmed. A and I. DayoubDocument5 pagesA New Class of Binary Zero Correlation Zone Sequence Sets: B. Fassi, A. Djebbari, Taleb-Ahmed. A and I. DayoubInternational Organization of Scientific Research (IOSR)No ratings yet
- 2012-1807. Kinematics Robot ManipulatorsDocument39 pages2012-1807. Kinematics Robot ManipulatorsSiddhartha MishraNo ratings yet
- AnovaDocument105 pagesAnovaasdasdas asdasdasdsadsasddssaNo ratings yet
- Lecture16 StereoDocument41 pagesLecture16 StereoKarthik UppuluriNo ratings yet
- Statistics 512 Notes 16: Efficiency of Estimators and The Asymptotic Efficiency of The MLEDocument6 pagesStatistics 512 Notes 16: Efficiency of Estimators and The Asymptotic Efficiency of The MLESandeep SinghNo ratings yet
- 125.785 Module 2.1Document94 pages125.785 Module 2.1Abhishek P BenjaminNo ratings yet
- 004 - s02 - The Lorentz GroupDocument4 pages004 - s02 - The Lorentz GroupBradley NartowtNo ratings yet
- Tong Hop BTL RobotDocument25 pagesTong Hop BTL RobottringuyenmdcNo ratings yet
- Bab VI. Perencanaan Trayektori (Trajectory Planning)Document78 pagesBab VI. Perencanaan Trayektori (Trajectory Planning)Anindita Yurianti MNo ratings yet
- Discrete Random Variables and Probability DistributionsDocument36 pagesDiscrete Random Variables and Probability DistributionskashishnagpalNo ratings yet
- 07 Fenton SimulationDocument52 pages07 Fenton SimulationAndres Pino100% (2)
- Alpha Lattice Design Resolvable Block DesignDocument12 pagesAlpha Lattice Design Resolvable Block DesignIp Wai MengNo ratings yet
- 6 Root LocusDocument52 pages6 Root LocusDogukan KarabeyinNo ratings yet
- Chapter 4 - The DFT and FFTDocument50 pagesChapter 4 - The DFT and FFTrhellfishNo ratings yet
- Random Walk SimulationsDocument58 pagesRandom Walk SimulationsKartikay5100% (1)
- Structure-from-Motion: - Equivalently, We Can Think of The World As Moving and The Camera As FixedDocument37 pagesStructure-from-Motion: - Equivalently, We Can Think of The World As Moving and The Camera As Fixedaminbn_1383No ratings yet
- MAT 444 Intro To Abstract Algebra April 2005 Class Equation, Example: Symmetric Group SDocument1 pageMAT 444 Intro To Abstract Algebra April 2005 Class Equation, Example: Symmetric Group SAdi SubbuNo ratings yet
- Analysis of Variance Models for Two-Way Classification with InteractionsDocument10 pagesAnalysis of Variance Models for Two-Way Classification with Interactionsamanpreet2190No ratings yet
- Động lực học và điều khiển robot: Robot manipulator and controlDocument34 pagesĐộng lực học và điều khiển robot: Robot manipulator and controlTu My LamNo ratings yet
- Eviews UnderstandingDocument23 pagesEviews UnderstandingarmailgmNo ratings yet
- Random Number GenerationDocument42 pagesRandom Number GenerationNikhil AggarwalNo ratings yet
- Expressing Electromagnetic Fields as PhasorsDocument7 pagesExpressing Electromagnetic Fields as PhasorsKalpana MurthyNo ratings yet
- Movie Segment: InstantaneousDocument9 pagesMovie Segment: Instantaneousrehan_sadiq1991No ratings yet
- VAR Models: Gloria González-RiveraDocument32 pagesVAR Models: Gloria González-RiveraVinko ZaninovićNo ratings yet
- Modeling and Analyzing System Behavior: February 25, 2013Document88 pagesModeling and Analyzing System Behavior: February 25, 2013elvagojpNo ratings yet
- 1 Numerical Differentiation: Week Nine Python For ElectromagnetismDocument5 pages1 Numerical Differentiation: Week Nine Python For ElectromagnetismbbteenagerNo ratings yet
- Chap 14Document58 pagesChap 14Vinayaga VigneshNo ratings yet
- Kinematics and Dynamics of Lower Body of Autonomous Humanoid Biped RobotDocument6 pagesKinematics and Dynamics of Lower Body of Autonomous Humanoid Biped RobotDeepak BharadwajNo ratings yet
- Ansari BradleyDocument9 pagesAnsari BradleySuriani ZahadiNo ratings yet
- Theory of Composite LaminatesDocument11 pagesTheory of Composite LaminatespraveenpinnojiNo ratings yet
- Scc0570 Zhao 1o2011 Hopfield 1Document13 pagesScc0570 Zhao 1o2011 Hopfield 1Saba AmiriNo ratings yet
- 8 Generation FunctionsDocument13 pages8 Generation Functionsrsmyrsmy14No ratings yet
- SD Lecture04 2D0fFreedomDocument18 pagesSD Lecture04 2D0fFreedomRonaldo HertezNo ratings yet
- Dynamic ProgrammingDocument7 pagesDynamic ProgrammingGlenn GibbsNo ratings yet
- Block Ciphers and The Advanced Encryption StandardDocument46 pagesBlock Ciphers and The Advanced Encryption Standardmilan_manwar6202No ratings yet
- Phys 101 - Chapter-V (1) ..Document27 pagesPhys 101 - Chapter-V (1) ..MD NAYM MIANo ratings yet
- Clebsch GordonDocument4 pagesClebsch Gordonjpr1428No ratings yet
- NOC23 EE49 Assignment Week04 v0.1Document4 pagesNOC23 EE49 Assignment Week04 v0.1Get Into StudyNo ratings yet
- Optimal Checkerboard Party PlanningDocument8 pagesOptimal Checkerboard Party PlanningLâm HàNo ratings yet
- Elasticity ME5413-Lecture1Document36 pagesElasticity ME5413-Lecture1Parag AhsanNo ratings yet
- Robot Dynamics - Newton-Euler Recursive ApproachDocument27 pagesRobot Dynamics - Newton-Euler Recursive ApproachDao YanNo ratings yet
- Lec05 Inverse VelocityKinematicsIDocument23 pagesLec05 Inverse VelocityKinematicsIPices SniderNo ratings yet
- DIGI2 MogollonDocument27 pagesDIGI2 MogollonMiguel Alarcón de la CruzNo ratings yet
- 5Document6 pages5Yas MonazahNo ratings yet
- The Z-Transform: Introduction and DerivationDocument16 pagesThe Z-Transform: Introduction and DerivationAnanth SettyNo ratings yet
- M/G/1 QUEUING MODEL TITLEDocument8 pagesM/G/1 QUEUING MODEL TITLEAnisha GargNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Applications of Derivatives Errors and Approximation (Calculus) Mathematics Question BankFrom EverandApplications of Derivatives Errors and Approximation (Calculus) Mathematics Question BankNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Control SystemDocument179 pagesControl Systemgurudatha26583% (6)
- Caspers S ParametersDocument54 pagesCaspers S ParametersArvind SrivastavaNo ratings yet
- 1 s2.0 S18766102130gh11284 MainDocument11 pages1 s2.0 S18766102130gh11284 MainshaheerdurraniNo ratings yet
- Application FormsdvDocument5 pagesApplication FormsdvshaheerdurraniNo ratings yet
- PIT01Document11 pagesPIT01shaheerdurraniNo ratings yet
- Application FormsdvDocument5 pagesApplication FormsdvshaheerdurraniNo ratings yet
- Engineering Job Application FormDocument7 pagesEngineering Job Application FormKaleem UllahNo ratings yet
- Quality Design Lab Positions at Dong-A University, South KoreaDocument1 pageQuality Design Lab Positions at Dong-A University, South KoreashaheerdurraniNo ratings yet
- PH DCALLFORAPPLICDocument39 pagesPH DCALLFORAPPLICshaheerdurraniNo ratings yet
- Application Form For Faculty PositcvbionsDocument1 pageApplication Form For Faculty PositcvbionsshaheerdurraniNo ratings yet
- CH 5 PV SystemsDocument96 pagesCH 5 PV SystemsMathew Pynadeth IttoopNo ratings yet
- Design of step-up converter for constant output in high power applicationsDocument5 pagesDesign of step-up converter for constant output in high power applicationsshaheerdurraniNo ratings yet
- SDDocument36 pagesSDshaheerdurraniNo ratings yet
- Avalanche Transit Time DevicesDocument13 pagesAvalanche Transit Time Devicesuma_maduraiNo ratings yet
- Mehmood Ul Hassan: Qualificati ON Year Institution Grade/Gp ADocument3 pagesMehmood Ul Hassan: Qualificati ON Year Institution Grade/Gp AshaheerdurraniNo ratings yet
- PID Controller: Control: The Proportional, The Integral and Derivative Values, Denoted PDocument16 pagesPID Controller: Control: The Proportional, The Integral and Derivative Values, Denoted PshaheerdurraniNo ratings yet
- Module 21 - Laplace TransformsDocument8 pagesModule 21 - Laplace Transformsapi-3827096No ratings yet
- Tubewell Energy Audit PDFDocument172 pagesTubewell Energy Audit PDFshaheerdurrani100% (1)
- WaveguidesDocument12 pagesWaveguidesSiddharth SinghNo ratings yet
- Module 21 - Laplace TransformsDocument8 pagesModule 21 - Laplace Transformsapi-3827096No ratings yet
- ConcludsfsionDocument1 pageConcludsfsionshaheerdurraniNo ratings yet
- FUndamentals of PV Systems TutorialDocument10 pagesFUndamentals of PV Systems Tutorialjcrodriguez83No ratings yet
- Microwave Engineering PDFDocument149 pagesMicrowave Engineering PDFshaheerdurraniNo ratings yet
- (Utce) Admission InformationDocument5 pages(Utce) Admission InformationshaheerdurraniNo ratings yet
- Pi, PD, Pid ControllersDocument21 pagesPi, PD, Pid ControllersGanesh RadharamNo ratings yet
- Note 4Document5 pagesNote 4shaheerdurraniNo ratings yet
- Grey Box Modelling For River Control: Bjo RN Sohlberg and Mats Sernfa LTDocument16 pagesGrey Box Modelling For River Control: Bjo RN Sohlberg and Mats Sernfa LTshaheerdurraniNo ratings yet
- 2-2015 Graduate Degree Fellowship Overview With Instructions and Application FormsDocument42 pages2-2015 Graduate Degree Fellowship Overview With Instructions and Application FormsshaheerdurraniNo ratings yet
- Pi, PD, Pid ControllersDocument21 pagesPi, PD, Pid ControllersGanesh RadharamNo ratings yet
- Eco Brick Paper 140314 - Full Paperr2Document30 pagesEco Brick Paper 140314 - Full Paperr2zero kakumaruNo ratings yet
- Datasheet Sensores MagneticosDocument2 pagesDatasheet Sensores Magneticosadriank10No ratings yet
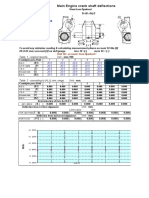
- Crankweb Deflections 9 Cyl ELANDocument2 pagesCrankweb Deflections 9 Cyl ELANСлавик МосинNo ratings yet
- Quincy Qrds Series Single-Stage, Oil-Less Reciprocating Air Compressors 2-30 HPDocument8 pagesQuincy Qrds Series Single-Stage, Oil-Less Reciprocating Air Compressors 2-30 HPCoral IcmNo ratings yet
- Siniloan Integrated National High SchoolDocument4 pagesSiniloan Integrated National High SchoolKimberlyn VelascoNo ratings yet
- d270 PDFDocument8 pagesd270 PDFศิวาเวช อบมาNo ratings yet
- Triggering and Dynamic Evolution of The LUSI Mud Volcano, IndonesiaDocument14 pagesTriggering and Dynamic Evolution of The LUSI Mud Volcano, IndonesiaAndika Bayu AjiNo ratings yet
- NSEP 2022-23 - (Questions and Answer)Document19 pagesNSEP 2022-23 - (Questions and Answer)Aditya KumarNo ratings yet
- Suntech STP225-20 WD 225Wp ENDocument2 pagesSuntech STP225-20 WD 225Wp ENmax2503No ratings yet
- MCR 3U5 CPT Part 2Document4 pagesMCR 3U5 CPT Part 2Ronit RoyanNo ratings yet
- DC30-010 - ODYSSEY Operator Manual - Rev PDocument92 pagesDC30-010 - ODYSSEY Operator Manual - Rev PYolanda Peña100% (1)
- Introduction To Random MatricesDocument508 pagesIntroduction To Random Matricesjorelex100% (1)
- Horizontal Twin-Shaft Paddle Mixers - The Ultimate in Mixing TechnologyDocument5 pagesHorizontal Twin-Shaft Paddle Mixers - The Ultimate in Mixing TechnologyMilling and Grain magazineNo ratings yet
- 6 Pile GroupDocument4 pages6 Pile GroupAnonymous nwByj9LNo ratings yet
- Science - Book 10Document312 pagesScience - Book 10Jaishree RamNo ratings yet
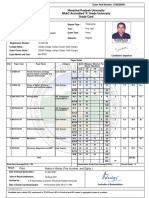
- Serial Number:1920110212668 Exam Roll Number Grade CardDocument2 pagesSerial Number:1920110212668 Exam Roll Number Grade Cardsimran vaidNo ratings yet
- Wireless Pick and Place RobotDocument26 pagesWireless Pick and Place RobotAshok GudivadaNo ratings yet
- Romax 4000 PDFDocument2 pagesRomax 4000 PDFALEKSANDARNo ratings yet
- SM PDFDocument607 pagesSM PDFGladwin SimendyNo ratings yet
- RFID OverviewDocument7 pagesRFID Overviewfelis132No ratings yet
- Cooling PDFDocument656 pagesCooling PDFTrầnNgọcCườngNo ratings yet
- Electromagnetism: Angelito A. Silverio, EceDocument79 pagesElectromagnetism: Angelito A. Silverio, EceAlmari SantosNo ratings yet
- 11 HW ChemistryDocument6 pages11 HW ChemistryJ BalanNo ratings yet
- Topic 5 - Criticality of Homogeneous ReactorsDocument53 pagesTopic 5 - Criticality of Homogeneous ReactorsSit LucasNo ratings yet
- Rockwell Scale PDFDocument5 pagesRockwell Scale PDFFortune FireNo ratings yet
- Edge Detection Algorithms ExplainedDocument17 pagesEdge Detection Algorithms ExplaineddgonlineNo ratings yet
- $binder 1Document156 pages$binder 1fchem11No ratings yet
- Researchtaro RopeDocument23 pagesResearchtaro RopeAlyssa Gian CarmonaNo ratings yet
- Electrical Steel, Also Called Lamination Steel, Silicon Electrical Steel, Silicon Steel or Transformer Steel, Is SpecialtyDocument5 pagesElectrical Steel, Also Called Lamination Steel, Silicon Electrical Steel, Silicon Steel or Transformer Steel, Is SpecialtyShobhit MauryaNo ratings yet
- Chapter 6 - Cementing - Part 1 PDFDocument32 pagesChapter 6 - Cementing - Part 1 PDFfadz607No ratings yet