You might also like
- Det II-Internal QPDocument1 pageDet II-Internal QPprasannakumar_7No ratings yet
- DET I-Internal QPDocument1 pageDET I-Internal QPprasannakumar_7No ratings yet
- S ParametersDocument43 pagesS ParametersSatadal GuptaNo ratings yet
- EDC April-May 2008Document3 pagesEDC April-May 2008prasannakumar_7No ratings yet
- A Fast Novel Algorithm For Salt and Pepper Impulse Noise Removal Using B-Splines For Finger Print Forensic ImagesDocument10 pagesA Fast Novel Algorithm For Salt and Pepper Impulse Noise Removal Using B-Splines For Finger Print Forensic Imagesprasannakumar_7No ratings yet
- EceDocument3 pagesEcebunny_589318117No ratings yet
- Lecture Note 2007Document86 pagesLecture Note 2007Jean Marie VianneyNo ratings yet
- Edc Lab Observation Gpcet (2016-17)Document67 pagesEdc Lab Observation Gpcet (2016-17)prasannakumar_7No ratings yet
- Elg6163 IirDocument33 pagesElg6163 IirDev TiwaryNo ratings yet
- Software Defined RadioDocument6 pagesSoftware Defined Radiogzb012No ratings yet
- Estimation TheoryDocument33 pagesEstimation Theoryprasannakumar_7No ratings yet
- SDR Brief 040313Document10 pagesSDR Brief 040313prasannakumar_7No ratings yet
- N5615 1Document31 pagesN5615 1Ali KashiNo ratings yet
- Current Affairs Q & AnswersDocument4 pagesCurrent Affairs Q & Answersprasannakumar_7No ratings yet
- Educational StatisticsDocument89 pagesEducational Statisticsprasannakumar_7No ratings yet
- 001Document6 pages001prasannakumar_7No ratings yet
- Sprs 717 FDocument236 pagesSprs 717 Fprasannakumar_7No ratings yet
- mm05 CDCDocument7 pagesmm05 CDCprasannakumar_7No ratings yet
- Ammeters &voltmetersDocument1 pageAmmeters &voltmetersprasannakumar_7No ratings yet
- Jawahar Lal Nehru Technological University Anantapur ANANTAPUR-515 002 (A.P)Document1 pageJawahar Lal Nehru Technological University Anantapur ANANTAPUR-515 002 (A.P)prasannakumar_7No ratings yet
- Ece Vi Digital Communication (10ec61) NotesDocument252 pagesEce Vi Digital Communication (10ec61) Notesprasannakumar_7No ratings yet
- Dynamic Spectrum Management (DSM) Algorithms For Multi-User XDSLDocument22 pagesDynamic Spectrum Management (DSM) Algorithms For Multi-User XDSLprasannakumar_7No ratings yet
- Graph TreesDocument17 pagesGraph TreesTanya KanodiaNo ratings yet
- Analog & Digital ModulationDocument11 pagesAnalog & Digital Modulationsowmya_iway_5946012No ratings yet
- CDMADocument83 pagesCDMAKaran KadhirNo ratings yet
- Revised Schedule For PH.D Entrance Test 2013Document1 pageRevised Schedule For PH.D Entrance Test 2013prasannakumar_7No ratings yet
- Channel Estimation For MIMO MC CDMA SystemsDocument9 pagesChannel Estimation For MIMO MC CDMA Systemsprasannakumar_7No ratings yet
- Median filters theory and applications overviewDocument5 pagesMedian filters theory and applications overviewprasannakumar_7No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Sample Questions For Practice Fiber LengthDocument0 pagesSample Questions For Practice Fiber LengthShailendra Mishra100% (4)
- Water Chemistry PDFDocument24 pagesWater Chemistry PDFravichan_2010No ratings yet
- Operation and Supply ChainDocument34 pagesOperation and Supply ChainAqib LatifNo ratings yet
- Surgical Lights and Operating Table SeriesDocument12 pagesSurgical Lights and Operating Table SeriesPABLO ZAMUDIONo ratings yet
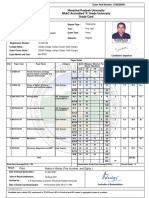
- Serial Number:1920110212668 Exam Roll Number Grade CardDocument2 pagesSerial Number:1920110212668 Exam Roll Number Grade Cardsimran vaidNo ratings yet
- Navier-Stokes Simulations of Projectile Base Flow with and without BleedDocument42 pagesNavier-Stokes Simulations of Projectile Base Flow with and without BleednanocardosoNo ratings yet
- Abutment Design CalculationsDocument13 pagesAbutment Design CalculationsFitsum Abebe100% (1)
- Mcas Magnetism ElectricityDocument27 pagesMcas Magnetism ElectricityBea GonzalesNo ratings yet
- Physics Ia FinalDocument11 pagesPhysics Ia FinalscarletNo ratings yet
- Rife Energy Medicine Cures DiseasesDocument5 pagesRife Energy Medicine Cures DiseasesOna OnićNo ratings yet
- Prepared By:: Ir - Ts.Dr. Renga Rao KrishnamoorthyDocument33 pagesPrepared By:: Ir - Ts.Dr. Renga Rao KrishnamoorthySyahir HamidonNo ratings yet
- Determine G by Using Simple PendulumDocument3 pagesDetermine G by Using Simple PendulumMohammad Sahedul MarufNo ratings yet
- Cover PrintDocument4 pagesCover PrintFidel ArroyoNo ratings yet
- Equipment Design - BOILERSDocument24 pagesEquipment Design - BOILERSEmyu ClaridadNo ratings yet
- Powtran PI9000-SDocument105 pagesPowtran PI9000-SOggie Kent Castillo100% (1)
- Quincy Qrds Series Single-Stage, Oil-Less Reciprocating Air Compressors 2-30 HPDocument8 pagesQuincy Qrds Series Single-Stage, Oil-Less Reciprocating Air Compressors 2-30 HPCoral IcmNo ratings yet
- Studies On Drying Kinetics of Solids in A Rotary DryerDocument6 pagesStudies On Drying Kinetics of Solids in A Rotary DryerVinh Do ThanhNo ratings yet
- Chapter 6 - Pinch Technologyrev2Document20 pagesChapter 6 - Pinch Technologyrev2Fadhli JapryNo ratings yet
- Experiment 1 (Equilibrium of Turning Forces)Document5 pagesExperiment 1 (Equilibrium of Turning Forces)shark eye100% (1)
- MCR 3U5 CPT Part 2Document4 pagesMCR 3U5 CPT Part 2Ronit RoyanNo ratings yet
- ETABS 2016 Concrete Frame Design: ETABS 2016 16.2.1 License # 14VSTSP6QKXWAC6Document2 pagesETABS 2016 Concrete Frame Design: ETABS 2016 16.2.1 License # 14VSTSP6QKXWAC6Luis Miguel GaviñoNo ratings yet
- Cat14 KDN EngDocument76 pagesCat14 KDN EngFederico LiaudatNo ratings yet
- SBT Mechanics TH 1Document535 pagesSBT Mechanics TH 1Shreyas Singh100% (2)
- Blade Profile Optimization of Kaplan Turbine Using CFD AnalysisDocument16 pagesBlade Profile Optimization of Kaplan Turbine Using CFD Analysiscbaraj100% (1)
- PROBABILITY ANALYSISDocument119 pagesPROBABILITY ANALYSISAnonymous bZtJlFvPtpNo ratings yet
- Chemical analysis of food lipidsDocument8 pagesChemical analysis of food lipidsmercedescristobalNo ratings yet
- TOP 10 PAKISTANI SCIENTISTSDocument5 pagesTOP 10 PAKISTANI SCIENTISTSabsarNo ratings yet
- William Liller - Space AstrophysicsDocument290 pagesWilliam Liller - Space Astrophysicsmuhamad dimas arifin a.k.a Ahmd El ArfNo ratings yet
- Unconfined Compression Test: Experiment No. 3Document6 pagesUnconfined Compression Test: Experiment No. 3Patricia TubangNo ratings yet
- Linear Programming: Presented by - Meenakshi TripathiDocument13 pagesLinear Programming: Presented by - Meenakshi TripathiRajendra PansareNo ratings yet