You might also like
- Chapter 6 PDFDocument13 pagesChapter 6 PDFMarcosNo ratings yet
- Chapter 6: Solution Algorithms For Pressure-Velocity Coupling in Steady FlowsDocument13 pagesChapter 6: Solution Algorithms For Pressure-Velocity Coupling in Steady FlowsDogus HurdoganogluNo ratings yet
- Pressure-Velocity Coupling: School of Mechanical Aerospace and Civil EngineeringDocument4 pagesPressure-Velocity Coupling: School of Mechanical Aerospace and Civil EngineeringDebdutta GhoshNo ratings yet
- CFD MomentumDocument20 pagesCFD MomentumSêlvâkûmâr JayabalaNo ratings yet
- SIMPLE Method On Non-Staggered Grids PDFDocument12 pagesSIMPLE Method On Non-Staggered Grids PDFAlejandro BecerraNo ratings yet
- MomentumDocument20 pagesMomentumMusa MohammedNo ratings yet
- Collocated FVMDocument17 pagesCollocated FVMapoorvs75No ratings yet
- Correction Equation of The SIMPLE Algorithm: Removal of Temporal and Under-Relaxation Terms From The PressureDocument18 pagesCorrection Equation of The SIMPLE Algorithm: Removal of Temporal and Under-Relaxation Terms From The PressurehlkatkNo ratings yet
- Chap 6Document32 pagesChap 6tony83333xNo ratings yet
- CFD PHD Course DavidsonDocument6 pagesCFD PHD Course Davidsondfi49965No ratings yet
- The SIMPLE Algorithm For Pressure-Velocity Coupling: ME 448/548 NotesDocument26 pagesThe SIMPLE Algorithm For Pressure-Velocity Coupling: ME 448/548 Noteskassu303No ratings yet
- The SIMPLE Algorithm For Pressure-Velocity Coupling: ME 448/548 NotesDocument26 pagesThe SIMPLE Algorithm For Pressure-Velocity Coupling: ME 448/548 NotesDuílio Ferronatto LeiteNo ratings yet
- The incompressible flow equations: Solving the pressure-velocity couplingDocument10 pagesThe incompressible flow equations: Solving the pressure-velocity couplingnsreddydsceNo ratings yet
- Finite Volume Method for Convection-Diffusion ProblemsDocument40 pagesFinite Volume Method for Convection-Diffusion ProblemsImran Rasheed100% (1)
- Matrix Methods For Plane WavesDocument16 pagesMatrix Methods For Plane WavestomorrowbabsNo ratings yet
- Rhie-Chow Interpolation in OpenFOAMDocument7 pagesRhie-Chow Interpolation in OpenFOAMOpenFOAM DocsNo ratings yet
- Applied Mathematics and MechanicsDocument10 pagesApplied Mathematics and Mechanicsinam vfNo ratings yet
- CFD 5Document19 pagesCFD 5camaradiyaNo ratings yet
- A Double Time-Scale CNN Solving Two-Dimensional Navier-Stokes EquationstDocument7 pagesA Double Time-Scale CNN Solving Two-Dimensional Navier-Stokes EquationstMateus Costa PinheiroNo ratings yet
- An Alternative Approach To Exact Solutions of A Special Class of Navier-Stokes FlowsDocument9 pagesAn Alternative Approach To Exact Solutions of A Special Class of Navier-Stokes FlowsRoberticoZeaNo ratings yet
- 1D Colocated SIMPLE SolutionDocument14 pages1D Colocated SIMPLE Solutionosmanpekmutlu100% (1)
- 2009 DSL MaliskaDocument6 pages2009 DSL MaliskaRony FerreiraNo ratings yet
- Ecole Polytechnique: Centre de Mathématiques Appliquées Umr Cnrs 7641Document24 pagesEcole Polytechnique: Centre de Mathématiques Appliquées Umr Cnrs 7641Kuematouo DenilsonNo ratings yet
- Wave Equations and SolutionsDocument34 pagesWave Equations and SolutionsAllas JonyNo ratings yet
- Sciencedirect: Control-Volume Method For Extralarge Network Hydraulic AnalysisDocument9 pagesSciencedirect: Control-Volume Method For Extralarge Network Hydraulic AnalysisJy Ce RzNo ratings yet
- Load flow analysis of a 3-bus power system using Gauss-Seidel methodDocument7 pagesLoad flow analysis of a 3-bus power system using Gauss-Seidel methodsamkousNo ratings yet
- Active Brownian Particles: Entropy Production and Fluctuation-ResponseDocument8 pagesActive Brownian Particles: Entropy Production and Fluctuation-ResponsecrocoaliNo ratings yet
- SHM Motion GuideDocument22 pagesSHM Motion GuideSherena Peter GovindNo ratings yet
- Finite Volume Data PresentationDocument35 pagesFinite Volume Data PresentationTarık YılmazNo ratings yet
- CH 4 - Principles of Power SystemDocument19 pagesCH 4 - Principles of Power SystemAqsa KhanamNo ratings yet
- Classical Mechanics Notes (6 of 10)Document18 pagesClassical Mechanics Notes (6 of 10)OmegaUserNo ratings yet
- Advance Mechanics of Machines For M.techDocument37 pagesAdvance Mechanics of Machines For M.techMohammedRafeeq91% (11)
- Exact Solutions of Convection Diffusion Equation by Modified F-Expansion MethodDocument9 pagesExact Solutions of Convection Diffusion Equation by Modified F-Expansion MethodIJMERNo ratings yet
- Velocity Pressure Coupling On A Collocated GridDocument17 pagesVelocity Pressure Coupling On A Collocated GridOlabanji ShonibareNo ratings yet
- SIMPLE AlgorithmDocument13 pagesSIMPLE AlgorithmprabumnNo ratings yet
- New Predictor-Corrector Method for Optimal Power FlowDocument5 pagesNew Predictor-Corrector Method for Optimal Power FlowfpttmmNo ratings yet
- Computational Fluid Dynamics-Vol1Document500 pagesComputational Fluid Dynamics-Vol1engma3No ratings yet
- AirportDocument4 pagesAirportfelixnziokiNo ratings yet
- Using The Surface Panel Method To Predict The Steady Performance of Ducted PropellersDocument6 pagesUsing The Surface Panel Method To Predict The Steady Performance of Ducted PropellersmohammadfarsiNo ratings yet
- 1 PDFDocument7 pages1 PDFnima2020No ratings yet
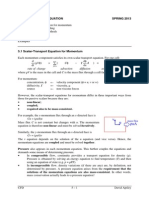
- The Scalar-Transport Equation SPRING 2009: SV A N C V TDocument30 pagesThe Scalar-Transport Equation SPRING 2009: SV A N C V Tvenkatr1No ratings yet
- Finite Volume Method For Transonic Potential Flow CalculationsDocument28 pagesFinite Volume Method For Transonic Potential Flow Calculationskevin ostos julcaNo ratings yet
- Euler Equation by Jameson MethodDocument40 pagesEuler Equation by Jameson MethodBikram Basu RoychowdhuryNo ratings yet
- MomentumDocument20 pagesMomentumMuhammad AdeelNo ratings yet
- Forms of The Microscopic Energy Balance: R W T WDocument15 pagesForms of The Microscopic Energy Balance: R W T WTushar BhingradiyaNo ratings yet
- IIIC3 IntegralForms LinearMomentumDocument31 pagesIIIC3 IntegralForms LinearMomentumKenneth KnowlesNo ratings yet
- Journal of Physics A Mathematical and General 2002 Vol. 35 (14) p3245Document20 pagesJournal of Physics A Mathematical and General 2002 Vol. 35 (14) p3245Héctor F BonillaNo ratings yet
- Fundamentals of Statistical Physics: Leo P. Kadanoff University of Chicago, USADocument17 pagesFundamentals of Statistical Physics: Leo P. Kadanoff University of Chicago, USAOmegaUserNo ratings yet
- Error Propagation of General Linear Methods For Ordinary Differential EquationsDocument21 pagesError Propagation of General Linear Methods For Ordinary Differential EquationsKarangano Kamaraju Castro ChavezNo ratings yet
- ME304 Advanced Engineering Analysis I Assignment #6Document2 pagesME304 Advanced Engineering Analysis I Assignment #6Tim TomkoNo ratings yet
- Chapter - 8 Turbulence and Its ModelingDocument19 pagesChapter - 8 Turbulence and Its ModelingxebitNo ratings yet
- SPH LAMMPS UserguideDocument23 pagesSPH LAMMPS UserguidesrokkamNo ratings yet
- Algorithms For The Ising ModelDocument67 pagesAlgorithms For The Ising ModelelboberoNo ratings yet
- Basic Concepts of ThermomechanicsDocument21 pagesBasic Concepts of ThermomechanicsOakmeNo ratings yet
- Pressure Drop For Flow of Power Law Fluids Inside Elliptical DuctsDocument9 pagesPressure Drop For Flow of Power Law Fluids Inside Elliptical DuctsBruno Glovacki MurakamiNo ratings yet
- Nonlinear Systems: Rooting-Finding ProblemDocument28 pagesNonlinear Systems: Rooting-Finding ProblemLam WongNo ratings yet
- Two Reaction TheoryDocument4 pagesTwo Reaction TheorybrainiacX100% (1)
- Lect 4Document11 pagesLect 4Osaid AhmadNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- A Course of Mathematics for Engineerings and Scientists: Volume 5From EverandA Course of Mathematics for Engineerings and Scientists: Volume 5No ratings yet
- Saral Gyan Hidden Gem Sept2010Document18 pagesSaral Gyan Hidden Gem Sept2010kau1986No ratings yet
- AK Training - Common Rail Diesel Fuel SystemsDocument61 pagesAK Training - Common Rail Diesel Fuel Systemslongtrandang5867100% (20)
- Print Version - Eloquent JavaScript PDFDocument269 pagesPrint Version - Eloquent JavaScript PDFkau1986100% (2)
- RPM SensorDocument73 pagesRPM Sensorkau1986No ratings yet
- Indian Diesel Specs by Siam GradeDocument1 pageIndian Diesel Specs by Siam Gradekau1986No ratings yet
- Used by The Country's Quickest and Fastest: Rod Length RelationshipsDocument4 pagesUsed by The Country's Quickest and Fastest: Rod Length Relationshipskau1986No ratings yet
- History of IndiaDocument367 pagesHistory of IndiaViraj DhuratNo ratings yet
- 1 Learn Spanish E-BookDocument109 pages1 Learn Spanish E-BookNataliya Vershytska0% (1)
- Laser-generated SAW technique for crack monitoring reviewDocument11 pagesLaser-generated SAW technique for crack monitoring reviewHay Day RNo ratings yet
- Electric Field of a Point ChargeDocument35 pagesElectric Field of a Point ChargeUsama ThakurNo ratings yet
- Finite Element Technique: 7.1 Introduction and ScopeDocument34 pagesFinite Element Technique: 7.1 Introduction and ScopeSharon ShineNo ratings yet
- Structural Design Calculations for South Kensington Station RoofDocument30 pagesStructural Design Calculations for South Kensington Station RoofHussein JaberNo ratings yet
- Simulation of Viscous Fingers Developed in Lifting Plate Hele-Shaw Cell in Volume of Fluid ModelDocument8 pagesSimulation of Viscous Fingers Developed in Lifting Plate Hele-Shaw Cell in Volume of Fluid ModelChetna SharmaNo ratings yet
- Senior SolutionDocument2 pagesSenior Solutionminhtue90No ratings yet
- 2022NOV PSAD UnlockedDocument7 pages2022NOV PSAD UnlockedKristelle V. TorrealbaNo ratings yet
- Analisis de Reacto Con ChemcadDocument42 pagesAnalisis de Reacto Con ChemcadIgnacio Alvarez MendozaNo ratings yet
- Applications of Newton's Laws: Equilibrium of A ParticleDocument31 pagesApplications of Newton's Laws: Equilibrium of A ParticleSarjana AhilanNo ratings yet
- Iso 5048 en PDFDocument6 pagesIso 5048 en PDFnaser shamsNo ratings yet
- Chapter 3-Materials in Prestressed ConcreteDocument55 pagesChapter 3-Materials in Prestressed ConcretesamuelgselassieNo ratings yet
- Effects of The Cone and Edge On The Acoustic Characteristics Ofa Cone LoudspeakerDocument13 pagesEffects of The Cone and Edge On The Acoustic Characteristics Ofa Cone LoudspeakerJavierNo ratings yet
- General Physics 1 Quarter 1 Week 5 SSLMDocument6 pagesGeneral Physics 1 Quarter 1 Week 5 SSLMMaki ATNo ratings yet
- LN - 2 - Relationships Among Bending Moment (M), Shear Force (S) and Load Intensity (P) in A BeamDocument2 pagesLN - 2 - Relationships Among Bending Moment (M), Shear Force (S) and Load Intensity (P) in A BeamKushani PiyumikaNo ratings yet
- Long-Wavelength Infrared Semiconductor Lasers PDFDocument406 pagesLong-Wavelength Infrared Semiconductor Lasers PDFKunchur Narayan100% (1)
- Bearing From Machine Design Reviewer by Jas TordilloDocument4 pagesBearing From Machine Design Reviewer by Jas TordilloMajo CruzemNo ratings yet
- Modulus Young GiancoliDocument3 pagesModulus Young GiancoliTakeru ShibaNo ratings yet
- Comparative Analysis of A Tall Structure PDFDocument8 pagesComparative Analysis of A Tall Structure PDFHugo MeloNo ratings yet
- Question Paper Code:: (10×2 20 Marks)Document3 pagesQuestion Paper Code:: (10×2 20 Marks)CjananiNo ratings yet
- Radio Waves: A Guide to Key Concepts and PropertiesDocument40 pagesRadio Waves: A Guide to Key Concepts and PropertiesMerlyCalvaNo ratings yet
- Ferromagnetism by Ibrar Ahmad Bs PhysicsDocument6 pagesFerromagnetism by Ibrar Ahmad Bs PhysicsIbrar AhmadNo ratings yet
- PCC Pier Dead and Live Load CalculationsDocument12 pagesPCC Pier Dead and Live Load CalculationsKanchanNo ratings yet
- Science 7 3RD Q 1Document486 pagesScience 7 3RD Q 1NERALDIN OGORIDANo ratings yet
- Roro Ramp CalDocument2 pagesRoro Ramp CalBoyNo ratings yet
- Crossed-Field Tubes (M-Type Tubes)Document24 pagesCrossed-Field Tubes (M-Type Tubes)Beverly PamanNo ratings yet
- MSG 00305Document15 pagesMSG 00305Nazeeh Abdulrhman AlbokaryNo ratings yet
- Ride Parameters and CharacteristicsDocument11 pagesRide Parameters and CharacteristicsParth PandeyNo ratings yet
- Understand Contacts - Midas NFX PDFDocument10 pagesUnderstand Contacts - Midas NFX PDFdzejziNo ratings yet
- CripplingDocument28 pagesCripplingHarish ShridharamurthyNo ratings yet