You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ethical Leadership Karen May P. UrlandaDocument8 pagesEthical Leadership Karen May P. UrlandaKaren May UrlandaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Pyramix V9.1 User Manual PDFDocument770 pagesPyramix V9.1 User Manual PDFhhyjNo ratings yet
- Dubai Healthcare Providers DirectoryDocument30 pagesDubai Healthcare Providers DirectoryBrave Ali KhatriNo ratings yet
- Sap Ewm - Erp Initial SetupDocument3 pagesSap Ewm - Erp Initial SetupVAIBHAV PARAB80% (5)
- Lead Magnet 43 Foolproof Strategies To Get More Leads, Win A Ton of New Customers and Double Your Profits in Record Time... (RDocument189 pagesLead Magnet 43 Foolproof Strategies To Get More Leads, Win A Ton of New Customers and Double Your Profits in Record Time... (RluizdasilvaazevedoNo ratings yet
- Hindustan Coca ColaDocument63 pagesHindustan Coca ColaAksMastNo ratings yet
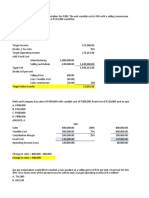
- CVP Solution (Quiz)Document9 pagesCVP Solution (Quiz)Angela Miles DizonNo ratings yet
- UBI1Document66 pagesUBI1Rudra SinghNo ratings yet
- ThesisDocument18 pagesThesisapi-29776055293% (15)
- The Basic New Keynesian Model ExplainedDocument29 pagesThe Basic New Keynesian Model ExplainedTiago MatosNo ratings yet
- ECPE 121 - Simulink LabsDocument13 pagesECPE 121 - Simulink LabsadilsondissoNo ratings yet
- Fundamental Concepts of Dependability - Algirdas Avizienis PDFDocument21 pagesFundamental Concepts of Dependability - Algirdas Avizienis PDFDiegoAlejandroBonalesElizarrarazNo ratings yet
- f33 FT Computing Lec01 Intro MotivDocument18 pagesf33 FT Computing Lec01 Intro Motivdayas1979No ratings yet
- Base Plett 2004 Jps 2Document15 pagesBase Plett 2004 Jps 2adilsondissoNo ratings yet
- f33 FT Computing Lec02 MeasuresDocument23 pagesf33 FT Computing Lec02 MeasuresadilsondissoNo ratings yet
- Metrics For Offline Evaluation of Prognostic PerformanceDocument20 pagesMetrics For Offline Evaluation of Prognostic PerformanceadilsondissoNo ratings yet
- f33 FT Computing Lec02 MeasuresDocument23 pagesf33 FT Computing Lec02 MeasuresadilsondissoNo ratings yet
- MPLAB XC8 C Compiler User Guide For PICDocument455 pagesMPLAB XC8 C Compiler User Guide For PICadilsondissoNo ratings yet
- zs01 04introDocument51 pageszs01 04introadilsondissoNo ratings yet
- f33 FT Computing Lec01 Intro MotivDocument19 pagesf33 FT Computing Lec01 Intro MotivadilsondissoNo ratings yet
- Panasonic NiMH HHR650DDocument0 pagesPanasonic NiMH HHR650DRam Krishan SharmaNo ratings yet
- Review PHM Li Ion 2011Document8 pagesReview PHM Li Ion 2011adilsondissoNo ratings yet
- Vian 2011 Embedding Health Management Into Mission Tasking For UAV TeamsDocument7 pagesVian 2011 Embedding Health Management Into Mission Tasking For UAV TeamsDavid ParedesNo ratings yet
- An Adaptive Recurrent Neural Network For Remaining Useful Life Prediction of Lithium-Ion BatteriesDocument10 pagesAn Adaptive Recurrent Neural Network For Remaining Useful Life Prediction of Lithium-Ion BatteriesadilsondissoNo ratings yet
- Emergency Landing for a Quadrotor Using PID ControlDocument7 pagesEmergency Landing for a Quadrotor Using PID ControladilsondissoNo ratings yet
- Fault Quad Rotor Gerardo FloresDocument21 pagesFault Quad Rotor Gerardo FloresadilsondissoNo ratings yet
- Adaptive Trajectory Tracking For Quadrotor Mavs in Presence of Parameter Uncertainties and External DisturbancesDocument6 pagesAdaptive Trajectory Tracking For Quadrotor Mavs in Presence of Parameter Uncertainties and External DisturbancesadilsondissoNo ratings yet
- Stability and Control of A Quadrocopter Despite The Complete Loss of One, Two, or Three PropellersDocument8 pagesStability and Control of A Quadrocopter Despite The Complete Loss of One, Two, or Three PropellersadilsondissoNo ratings yet
- Fault Tolerant Control of A Quadrotor UAV Using Sliding Mode ControlDocument6 pagesFault Tolerant Control of A Quadrotor UAV Using Sliding Mode ControladilsondissoNo ratings yet
- Modelo UsadoDocument8 pagesModelo UsadoadilsondissoNo ratings yet
- Actuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùDocument6 pagesActuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùadilsondissoNo ratings yet
- Instantaneous Magnetic Field Distribution Brushless Permanent Magnet DC Motors, Part I: Open-Circuit FieldDocument12 pagesInstantaneous Magnetic Field Distribution Brushless Permanent Magnet DC Motors, Part I: Open-Circuit FieldadilsondissoNo ratings yet
- On Computer Aided Control System Design. August 1999, Pages 522-527Document7 pagesOn Computer Aided Control System Design. August 1999, Pages 522-527adilsondissoNo ratings yet
- 101 200TransistorCircuitsDocument103 pages101 200TransistorCircuitsLeoNo ratings yet
- Quadrotor v1 3dDocument1 pageQuadrotor v1 3dadilsondissoNo ratings yet
- TSP Hoffman Padberg RinaldiDocument9 pagesTSP Hoffman Padberg RinaldiadilsondissoNo ratings yet
- V 15 N 2 P 218Document12 pagesV 15 N 2 P 218Nirmal Kumar PandeyNo ratings yet
- AN857 BLDC Motor Control Made Easy (Microchip)Document48 pagesAN857 BLDC Motor Control Made Easy (Microchip)Carlos Iván RuedaNo ratings yet
- IEE6Document6 pagesIEE6adilsondissoNo ratings yet
- Military Railway Unit Histories Held at MHIDocument6 pagesMilitary Railway Unit Histories Held at MHINancyNo ratings yet
- Gigahertz company background and store locationsDocument1 pageGigahertz company background and store locationsjay BearNo ratings yet
- Hilti X-HVB SpecsDocument4 pagesHilti X-HVB SpecsvjekosimNo ratings yet
- Statement of PurposeDocument2 pagesStatement of Purposearmaan kaurNo ratings yet
- AB InBev Code of Business Conduct PDFDocument10 pagesAB InBev Code of Business Conduct PDFcristian quelmis vilca huarachiNo ratings yet
- Capran+980 CM en PDFDocument1 pageCapran+980 CM en PDFtino taufiqul hafizhNo ratings yet
- AssemblyinstructionsDocument12 pagesAssemblyinstructionsPriscila AzevedoNo ratings yet
- UPGRADEDocument2 pagesUPGRADEVedansh OswalNo ratings yet
- S0231689H02-B01-0001 Rev 02 Code 1 General Arrangement Drawing For 44 Kva Diesel Generator PDFDocument6 pagesS0231689H02-B01-0001 Rev 02 Code 1 General Arrangement Drawing For 44 Kva Diesel Generator PDFAnonymous AfjzJdnNo ratings yet
- Telangana Budget 2014-2015 Full TextDocument28 pagesTelangana Budget 2014-2015 Full TextRavi Krishna MettaNo ratings yet
- Rejoinder To Adom Ochere's Misrepresentation - FinalDocument3 pagesRejoinder To Adom Ochere's Misrepresentation - FinalFuaad DodooNo ratings yet
- Embedded Systems: Martin Schoeberl Mschoebe@mail - Tuwien.ac - atDocument27 pagesEmbedded Systems: Martin Schoeberl Mschoebe@mail - Tuwien.ac - atDhirenKumarGoleyNo ratings yet
- Norms and specifications for distribution transformer, DG set, street light poles, LED lights and high mast lightDocument4 pagesNorms and specifications for distribution transformer, DG set, street light poles, LED lights and high mast lightKumar AvinashNo ratings yet
- Localization Strategy in Vietnamese Market: The Cases ofDocument25 pagesLocalization Strategy in Vietnamese Market: The Cases ofHồng Thy NguyễnNo ratings yet
- The Punjab Commission On The Status of Women Act 2014 PDFDocument7 pagesThe Punjab Commission On The Status of Women Act 2014 PDFPhdf MultanNo ratings yet
- Pike River Case StudyDocument7 pagesPike River Case StudyGale HawthorneNo ratings yet
- PDS-1st PageDocument1 pagePDS-1st PageElmer LucreciaNo ratings yet
- Nucleic Acid Isolation System: MolecularDocument6 pagesNucleic Acid Isolation System: MolecularWarung Sehat Sukahati100% (1)
- High Frequency Voltage Probe Non-Availability on GeMDocument2 pagesHigh Frequency Voltage Probe Non-Availability on GeMjudeNo ratings yet
- 2 - Nested IFDocument8 pages2 - Nested IFLoyd DefensorNo ratings yet