Professional Documents
Culture Documents
These Vechiu
Uploaded by
hassenbbCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
These Vechiu
Uploaded by
hassenbbCopyright:
Available Formats
Thse prpare au sein du Laboratoire en Ingnierie des Processus et des Services Industriels de lESTIA, Bidart,
dans le laboratoire du Groupe de Recherche en Electrotechnique et Automatique du Havre de lUniversit du Havre
et dans le Dpartement dIngnierie des Systmes et Automatique de lUniversit du Pays Basque de San Sebastian
Anne 2005
THESE
Prsente
pour obtenir le grade de
DOCTEUR DE L'UNIVERSITE DU HAVRE
Discipline : Electronique, Electrotechnique et Automatique
Spcialit : Gnie Electrique
par
Ionel VECHIU
MODELISATION ET ANALYSE DE LINTEGRATION
DES ENERGIES RENOUVELABLES DANS UN
RESEAU AUTONOME
Soutenue le 15 dcembre 2005 devant le jury compos de :
Shahrokh SAADATE Rapporteur et Prsident du Jury
Stephan ASTIER Rapporteur
Brayima DAKYO Examinateur
Haritza CAMBLONG Examinateur
Gerardo TAPIA-OTAEGUI Examinateur
Cristian NICHITA Examinateur
Nicolas FICHAUX Membre invit
Itziar ZUBIA OLASKOAGA Membre invit
Nataliei
si familiei mele
Happy is he who gets to
know the reasons for
things
(Virgil)
REMERCIEMENTS
Le travail prsent dans cette thse a t effectu au sein du Laboratoire en Ingnierie
des Processus et des Services Industriels (LIPSI), dans le laboratoire Groupe de Recherche en
Electrotechnique et Automatique du Havre (GREAH) et dans le Dpartement dIngnierie des
Systmes et Automatique de San Sebastian (Pays Basque espagnol). Il a t financ par la
Communaut dAgglomration de Bayonne, Anglet, Biarritz.
J adresse mes vifs remerciements mon directeur et mes co-encadrants de thse
Monsieur Brayima DAKYO, Professeur lUniversit du Havre, Haritza CAMBLONG,
Enseignant-chercheur lESTIA, et Gerardo TAPIA, Professeur associ lUniversit du
Pays Basque (Sain Sebastian) pour lappui scientifique et pour leur disponibilit durant ces
trois annes de thse. Travailler leur cot est un plaisir.
J e tiens remercier tout particulirement Monsieur J ean-Roch GUIRESSE, directeur
de lESTIA, et Monsieur Pascal WEIL, le directeur du LIPSI, de mavoir accueilli lESTIA,
au sein du laboratoire LIPSI.
J e remercie vivement Monsieur Shahrokh SAADATE, Universit Henri Poincar
Nancy, et Monsieur Stephan ASTIER, Professeur ENSEEIHT Toulouse, davoir accept de
rapporter cette thse.
J e tiens galement remercier Monsieur Cristian NICHITA, Matre de confrences
lUniversit du Havre, Nicolas FICHAUX, Coordinateur R&D du Ple olien lADEME et
Itziar ZUBIA OLASKOAGA, Professeur associ, Universit du Pays Basque (San Sebastian),
qui nous ont fait lhonneur de participer au jury.
J 'adresse aussi mes remerciements mon ami Octavian CUREA, Enseignant-
chercheur lESTIA pour ses encouragements et son soutien durant ces annes de thse.
Il me serait impardonnable d'oublier de remercier mes collgues du LIPSI pour leur
soutien permanent, en particulier David MARIN, Ludovic GARREAU, Raphalle DORE,
J ean TRUNZLER, Yoann VERNAT, Philippe ETCHART, Olivier ARRIJ URIA, Thodore
TOTOZAFINI, Guillaume POL, Guillaume TERRASSON, Olivier PIALOT.
J e tiens adresser une mention particulire tout le personnel de lESTIA pour l'aide
constante qu'il m'a apporte tout au long de ces travaux.
J e finirai par les remerciements les plus importants qui vont ma famille qui je dois
beaucoup et ma copine Natalia (multumesc, Copile) pour leur amour et leur soutien
permanent.
Sommaire
SOMMAIRE
INTRODUCTION GENERALE................................................................................................1
CHAP. I : SYSTEME DENERGIE HYBRIDE....................................................................9
I.1 Introduction.......................................................................................................................9
I.2 Dfinition et mission des SEH...........................................................................................9
I.3 Etat de lart......................................................................................................................10
I.3.1 Principaux composants des SEH..................................................................................13
I.3.1.1 Sources dnergie renouvelable.................................................................................14
I.3.1.2 Autres sources dnergie renouvelable......................................................................20
I.3.1.3 Gnrateur diesel .......................................................................................................21
I.3.1.4 Systmes de stockage................................................................................................22
I.3.1.5 Systme de supervision.............................................................................................23
I.3.1.6 Convertisseurs...........................................................................................................24
I.3.1.7 Charges......................................................................................................................25
I.3.2 Configuration des SEH.................................................................................................25
I.3.2.1 Architecture bus CC.............................................................................................25
I.3.2.2 Architecture mixte bus CC/CA............................................................................26
I.3.3 Dimensionnement des SEH..........................................................................................27
I.3.4 Problmes rencontrs dans le fonctionnement des SEH..............................................29
I.3.5 Commande des SEH.....................................................................................................32
I.3.5.1 Stratgie de fonctionnement......................................................................................32
I.3.5.2 Qualit de lnergie lectrique produite par les SEH................................................35
I.4 Conclusions.....................................................................................................................37
CHAP. II : DIMENSIONNEMENT, MODELISATION ET COMMANDE DES
COMPOSANTS DU SEH........................................................................................................41
II.1 Introduction....................................................................................................................41
II.2 Dimensionnement du SEH.............................................................................................41
II.3 Modlisation et commande des composants du SEH.....................................................45
II.3.1 Systme olien.........................................................................................................46
II.3.1.1 Conversion arodynamique..............................................................................47
Sommaire
II.3.1.2 Transmission....................................................................................................49
II.3.1.3 Machine asynchrone cage dcureuil ............................................................50
II.3.1.4 Courbe thorique de fonctionnement et structure de commande.....................53
II.3.1.5 Convertisseur triphas Modulation de Largeur dImpulsions (MLI)............55
II.3.1.6 Stratgie de commande....................................................................................57
II.3.2 Systme photovoltaque..........................................................................................60
II.3.2.1 Cellule photovoltaque.....................................................................................61
II.3.2.2 Panneau photovoltaque...................................................................................65
II.3.2.3 Optimisation du rendement nergtique du systme PV .................................68
II.3.2.4 Hacheur survolteur...........................................................................................71
II.3.3 Bus courant continu..............................................................................................72
II.3.3.1 Batterie.............................................................................................................72
II.3.3.2 Hacheur rversible en courant..........................................................................76
II.3.4 Onduleur triphas....................................................................................................77
II.3.4.1 Modlisation de la partie puissance de londuleur triphas.............................77
II.3.4.2 Stratgies de commande de londuleur ............................................................79
II.3.5 Gnrateur diesel.....................................................................................................82
II.3.5.1 Moteur diesel et rgulateur de vitesse..............................................................82
II.3.5.2 Modle simplifi de la machine synchrone......................................................84
II.4 Conclusions........................................................................................................................87
CHAP. III : SEH EN CONDITIONS DE DESEQUILIBRE ...................................................91
III.1 Introduction...................................................................................................................91
III.2 Reprsentations des variables triphases dsquilibres..............................................92
III.2.1 Composantes symtriques des systmes triphass.................................................92
III.2.2 Transformation des systmes triphass dsquilibrs dans le rfrentiel tournant
dq0.....................................................................................................................................94
III.3 SEH avec charge dsquilibre.....................................................................................97
III.3.1 Dfinition du dsquilibre de tensions...................................................................97
III.3.2 Topologies de SEH en conditions de dsquilibre................................................98
III.4 Convertisseur quatre bras...........................................................................................99
III.4.1 Modlisation de la partie puissance du convertisseur..........................................101
III.5 Stratgies de commande du convertisseur quatre bras.............................................102
Sommaire
III.5.1 Stratgie de commande-dq0.................................................................................103
III.5.2 Stratgies de commande-dih................................................................................107
III.5.2.1 Dcomposition de la tension triphase en composantes symtriques...........107
III.5.2.2 Transformations appliques la tension de squence directe......................110
III.5.2.3 Transformations appliques la tension de squence inverse......................111
III.5.2.4 Transformations appliques la tension de squence homopolaire.............112
III.5.2.5 Stratgie de commande complte.................................................................116
III.6 Conclusions.................................................................................................................121
CHAP. IV : RESULTATS DE SIMULATION......................................................................125
IV.1 Introduction.................................................................................................................125
IV.2 Analyse du comportement dynamique du SEH..........................................................125
IV.2.1 Variations climatiques.........................................................................................126
IV.2.1.1 Variation du vent..........................................................................................126
IV.2.1.2 Variation dclairement................................................................................128
IV.2.2 Variation de charge..............................................................................................131
IV.2.2.1 Variation de charge rsistive........................................................................131
IV.2.2.1 Variation de charge RLE..............................................................................134
IV.3 Analyse du SEH en rgime dsquilibr....................................................................136
IV.3.1 Rgime dsquilibr permanent ..........................................................................137
IV.3.2 Rgime transitoire................................................................................................145
IV.4 Conclusions.................................................................................................................152
CONCLUSIONS GENERALES ET PERSPECTIVES.........................................................155
ANNEXES
ANNEXE A ............................................................................................................................171
ANNEXE B ............................................................................................................................177
ANNEXE C............................................................................................................................181
ANNEXE D............................................................................................................................185
ANNEXE E.............................................................................................................................189
ANNEXE F.............................................................................................................................193
INTRODUCTION GENERALE
Introduction gnrale
1
INTRODUCTION GENERALE
Le soleil, le vent, les chutes deau et la biomasse sont autant de ressources naturelles
utilisables pour gnrer de lnergie lectrique, grce aux diffrentes technologies que lon
peut regrouper par filires conomiques en fonction de la ressource considre. Disponibles
en quantit suprieure aux besoins nergtiques actuels de lhumanit, les ressources
dnergie renouvelable naugmentent pas la quantit de gaz effet de serre de latmosphre
lors de leur exploitation. Elles reprsentent par ailleurs une chance pour plus de deux milliards
de personnes, habitant des rgions isoles, daccder llectricit. Ces atouts, allis des
filires de plus en plus performantes, favorisent le dveloppement des nergies renouvelables.
Parmi les systmes les plus prometteurs pour lutilisation des nergies renouvelables,
il y a les Systmes dEnergie Hybrides (SEH). Pour les rgions isoles ou loignes, le prix
dextension du rseau lectrique savre prohibitif et le surcot de lapprovisionnement en
combustible augmente radicalement avec lisolement. Le terme Systme dEnergie
Hybride fait allusion aux systmes de gnration dnergie lectrique utilisant plusieurs
types de sources. Dans cette notion, on exclut les grands rseaux interconnects dans lesquels
les sources peuvent aussi tre de plusieurs types. La combinaison des sources dnergie
renouvelable comme lolienne, le photovoltaque ou les petites centrales hydrolectriques
peut constituer un complment ou une alternative aux groupes lectrognes diesels utiliss
gnralement pour la gnration dlectricit dans les rgions isoles. Les SEH sont
gnralement conus pour rpondre un besoin nergtique allant du simple clairage jusqu
llectrification complte de villages ou de petites les.
Certaines filires des nergies renouvelables, dj mres, peuvent fournir des
composants fiables et conomiquement rentables pour l'intgration dans les systmes
dnergie lectrique. Cependant, des amliorations dans la conception et le fonctionnement
des SEH sont toujours ncessaires pour rendre plus comptitives ces filires technologiques et
permettre leur essor.
Lutilisation de plusieurs sources dnergie dans un SEH doit avoir une incidence
profitable sur la production dnergie, en termes de cot et de disponibilit, tant entendu que
le bilan cologique est suppos a priori favorable. Les moyens de production tels que
Introduction gnrale
2
lolien, le photovoltaque, le petit hydraulique etc. prsentent des capacits de production
incertaines et souvent fluctuantes, non corrles lvolution de la charge. Le but premier
dun SEH est dassurer lnergie demande par la charge et, si possible, de rendre maximale
dans le bilan, la part dnergie provenant des sources dnergie renouvelable. Dans tous les
cas, la bonne qualit de la puissance doit tre garantie par rapport aux normes de scurit des
personnes et dusage des quipements.
Dans ce contexte, le travail de recherche prsent dans cette thse est une contribution
pour une meilleure intgration des sources dnergie renouvelable dans un SEH.
Dans un premier temps, ce travail sattache la recherche de modles de simulation pour des
lments constitutifs dun SEH (sources dnergie, lments de stockage, systmes de
conversion dnergie etc.).
Ces modles de simulation peuvent tre utiliss de manire modulaire pour tudier diffrentes
configurations de compositions et de connexions des SEH, ainsi que diffrentes stratgies de
commande. Cette dmarche permet ainsi de crer des scnarios de conditions de
fonctionnement pour le SEH et de faire varier par la simulation, les sources dnergie et/ou le
niveau et le type de charge. Cest ce quest fait dans un deuxime temps.
Les modles de simulation sont dvelopps sous lenvironnement
MATLAB/Simulink. Nous avons choisi dtudier le comportement dynamique dun SEH
avec trois sources dnergie Eolien/Photovoltaque/Diesel et des batteries de stockage. Trois
aspects sont traits dans ltude :
La configuration du SEH ;
La maximisation de lutilisation des ressources renouvelables ;
La qualit de lnergie lectrique.
La configuration du SEH
La configuration du SEH est le rsultat dune procdure de dimensionnement ralise
en fonction des ressources nergtiques disponibles, ainsi que des contraintes dutilisation.
Parmi les sources dnergie renouvelable disponibles nous avons retenu le systme lolien et
le systme photovoltaque.
Le stockage d'nergie est un facteur clef dans un systme dnergie hybride en site
isol. Dans la plupart des cas, les batteries reprsentent encore la technologie la plus rentable.
Introduction gnrale
3
Cette solution et un systme de renfort diesel est retenu pour satisfaire la disponibilit de
lnergie pour la charge en dpit des fluctuations dnergie renouvelable.
La maximisation de lutilisation des ressources renouvelables
La maximisation de lutilisation des ressources renouvelables suppose un degr plus
lev dintgration des sources dnergie renouvelable, une technologie complexe, des
systmes de commande perfectionns et souvent un systme de stockage. Les systmes de
commande doivent permettre une rcupration maximale de lnergie du vent et du
rayonnement solaire, ainsi que la gestion du systme de stockage.
L'nergie contenue dans le vent varie avec le cube de la vitesse du vent. Une
maximisation de lnergie rcupre dans le vent suppose une maximisation du rendement du
capteur olien. Pour rcuprer un maximum dnergie, un systme de commande doit adapter
la vitesse de rotation du rotor olien la vitesse du vent.
Les capteurs photovoltaques convertissent directement le rayonnement solaire en
lectricit. Le rendement de conversion entre la puissance lectrique et la puissance lumineuse
est d'environ 11 15 % pour les cellules des panneaux actuellement disponibles sur le
march. Pour que les panneaux PV puissent dlivrer le maximum de la puissance disponible,
le systme de commande doit permettre de varier le point statique de fonctionnement. Le
point de puissance maximale, cest--dire le point de fonctionnement pour lequel la puissance
absorbe par une charge rsistive est maximale, est obtenu en adaptant la tension aux bornes
des panneaux photovoltaques.
La qualit de lnergie lectrique
La notion de qualit du produit lectricit est attache au niveau de satisfaction de
lutilisateur. Les performances de ses quipements sont directement lies la qualit de la
tension dalimentation. Les caractristiques de la tension sont dfinies et dcrites selon les
aspects suivants :
Frquence,
Amplitude,
Symtrie du systme triphas,
Distorsions harmoniques.
Introduction gnrale
4
Le but du SEH tudi lors de ce travail est dalimenter en nergie la fois des charges
triphases et monophases, une tension sinusodale amplitude et frquence constantes.
Une charge lectrique triphase non-quilibre ou des charges monophases alimentes par un
SEH triphas peuvent conduire des dsquilibres de tension entre les phases. Pour rsoudre
ce problme, les mesures suivantes ont t prises :
Un onduleur quatre bras et une stratgie de commande spciale sont utiliss pour
quilibrer la tension en conditions de charge dsquilibre ;
Le bus courant continu (lentre de londuleur) est rgul une valeur constante
pour assurer lamplitude de la tension aux bornes de la charge et par consquent, pour
quilibrer les flux de puissance.
Le travail prsent dans cette thse est organis en quatre chapitres.
Dans le premier chapitre, aprs avoir prsent la dfinition et la mission des SEH, un
tat de lart de ce systme est ralis. Notre travail portant sur un SEH
Eolienne/Photovoltaque/Diesel et batteries de stockage, une attention particulire a t
consacre ces types de sources et de stockage. Ensuite, sont prsentes les diffrentes
solutions technologiques permettant dexploiter les ressources renouvelables en site isol, les
moyens de dimensionnement, ainsi que les problmes de fonctionnement du SEH et quelques
stratgies de commande usuelles.
Le deuxime chapitre prsente dabord une tude de dimensionnement pour
dterminer les capacits nominales des sources et du systme de stockage utiliss dans la
configuration du SEH tudi. Tous les composants du SEH sont ensuite modliss dans le but
danalyser le comportement dynamique du systme complet face aux variations climatiques et
de charge. Chaque source dnergie et le systme de stockage disposent dun systme de
commande pour une meilleure intgration dans le systme hybride. Le SEH, tel quil est
modlis dans le deuxime chapitre, permet une analyse dynamique en rgime de charge
quilibre.
Dans le troisime chapitre, les outils permettant une analyse dynamique du systme en
rgime dsquilibr sont dvelopps. Ce chapitre prsente londuleur triphas quatre bras
comme solution pour quilibrer la tension aux bornes de la charge en rgime dsquilibr.
Introduction gnrale
5
Deux stratgies de commande capables de traiter les dsquilibres de tension sont
implmentes sur le modle de londuleur quatre bras.
Le quatrime chapitre est consacr aux rsultats de simulation. Ce chapitre, structur
en deux parties, prsente dabord lanalyse du comportement dynamique du SEH, modlis
dans le deuxime chapitre, face aux variations climatiques et de charges triphases
quilibres. Dans la deuxime partie, le SEH tudi, quip de londuleur quatre bras, est
soumis aux dsquilibres de charge.
Enfin, les principaux rsultats de ce travail de recherche et les perspectives qui en
rsultent sont donns dans les conclusions gnrales.
CHAP. I : SYSTEME DENERGIE HYBRIDE
Chap I : Systme dnergie hybride
9
CHAP. I : SYSTEME DENERGIE HYBRIDE
I.1 Introduction
Dans la plupart des rgions isoles, le gnrateur diesel est la source principale
dnergie lectrique. Pour ces rgions, le prix dextension du rseau lectrique est prohibitif et
le prix du combustible augmente radicalement avec lisolement. La baisse continue des prix
des gnrateurs bass sur lnergie renouvelable et la fiabilit croissante de ces systmes ont
men une plus grande utilisation des sources d'nergie renouvelable pour la gnration
dnergie lectrique dans les rgions isoles.
Une des proprits qui limite lutilisation de lnergie renouvelable est lie la
variabilit des ressources. Les fluctuations de la charge selon les priodes annuelles ou
journalires ne sont pas forcment corrles avec les ressources. Pour les rgions isoles, la
solution retenir est certainement le couplage entre plusieurs sources, par exemple des
oliennes, des panneaux photovoltaque et des gnrateurs diesel.
Aprs avoir prsent la dfinition et la mission dun SEH, nous nous intressons dans
ce chapitre ltat de lart, en particulier relatif aux sources dnergie qui composent ces
systmes habituellement. Nous dcrivons les diffrentes solutions technologiques permettant
dexploiter les ressources renouvelables en site isol, ainsi que les moyens de
dimensionnement du SEH. Quelques problmes de fonctionnement et les stratgies de
commande habituelles du SEH sont prsents la fin de ce chapitre.
I.2 Dfinition et mission des SEH
Les systmes dnergie hybrides (SEH) associent au moins deux technologies
complmentaires : une ou plusieurs sources dnergie classiques, gnralement des
gnrateurs diesels, et au moins une source dnergie renouvelable [1-4]. Les sources
dnergie renouvelable, comme lolienne et le photovoltaque, ne dlivrent pas une puissance
constante. Leur association avec des sources classiques permet dobtenir une production
lectrique continue. Les systmes dnergie hybrides sont gnralement autonomes par
rapport aux grands rseaux interconnects et sont souvent utiliss dans les rgions isoles.
Chap I : Systme dnergie hybride
10
Le but dun SEH est dassurer lnergie demande par la charge et, si possible, de
produire le maximum dnergie partir des sources dnergie renouvelable, tout en
maintenant la qualit de lnergie fournie [1]. De plus, lconomie de carburant et la baisse de
prix obtenues par la gnration hybride doivent au moins couvrir linvestissement fait pour les
gnrateurs dnergie renouvelable et les autres composants auxiliaires du systme.
Du point de vue technologique, la fiabilit nest pas seulement une question de respect
des normes pour lalimentation en lectricit, mais aussi de maintenance, compte tenu des
conditions particulires des rgions isoles. Les systmes isols sont souvent caractriss par
une infrastructure (communication, services, etc.) pauvre, un accs difficile et un manque de
personnel qualifi.
Les performances dun SEH, le rendement et la dure de vie, sont influences en partie
par sa conception, cest--dire le dimensionnement des composants, le type de composants,
larchitecture etc, et dautre part, par le choix de la stratgie de fonctionnement. Quelques
paramtres permettant dvaluer ses performances sont : lconomie de carburant, le cot du
kW, le nombre et la dure des pannes, le nombre darrts pour lentretien etc.
La dure de vie des composants dun SEH peut tre beaucoup plus courte que la dure
de vie normale des composants individuels (fonctionnement en connexion aux rseaux
interconnects) [1]. Les points les plus critiques sont en gnral la dgradation des batteries,
lendommagement des dmarreurs diesel et du systme mcanique de freinage des oliennes
et la carbonisation excessive des cylindres du moteur diesel.
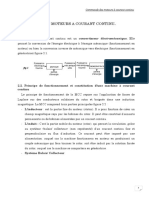
I.3 Etat de lart
En plus dun ou plusieurs gnrateurs diesels (GD) et dau moins une source dnergie
renouvelable, un SEH peut aussi incorporer un systme de distribution courant alternatif
(CA), un systme de distribution courant continu (CC), un systme de stockage, des
convertisseurs, des charges, des charges de dlestage et une option de gestion des charges ou
un system de supervision. Toutes ces composantes peuvent tre connectes en diffrentes
architectures. Celles-ci sont rsumes dans la Figure I-1. Dans la plupart des cas, les systmes
hybrides classiques contiennent deux bus [2] : un bus CC pour les sources, les charges CC
et les batteries et un bus CA pour les gnrateurs CA et le systme de distribution. Les
Chap I : Systme dnergie hybride
11
sources dnergie renouvelable peuvent tre connectes au bus CA ou CC en fonction de
la dimension et la configuration du systme. Linterconnexion entre les deux bus peut tre
ralise par lintermde de llectronique de puissance : onduleurs/redresseurs ou
convertisseurs bidirectionnels. A part la charge principale, un systme hybride peut contenir
aussi des charges auxiliaires (charge diffre, charge optionnelle, charge de dlestage) pour
raliser lquilibre nergtique. Si la charge principale est alimente sans interruption, les
charges auxiliaires sont alimentes en nergie par ordre de priorit, seulement quand il existe
un surplus dnergie. Ainsi, dans un SEH avec des batteries de stockage et charges auxiliaires,
sil existe un excs dnergie (venant des sources dnergie renouvelable et des diesels), celui-
ci passera dabord dans les batteries et ensuite, il sera utilis pour alimenter les autres charges
auxiliaires en fonction de leur priorit. Dans un tel systme, les batteries de stockage jouent
un double rle : charge et source.
Convertisseur
bidirectionnel
Charges CA
1. Principale
2. Diffre
3. Optionnelle
4. Dlestage
=
Gnrateurs CC
Sources dnergie
renouvelable
Gnrateurs Diesels
Systme de
stockage
Gnrateurs CA
Sources dnergie
renouvelable
Gnrateurs Diesels
Bus
CC
Bus
CA
Redresseur
=
Onduleur
Charges CC
1. Principale
2. Diffre
3. Optionnelle
4. Dlestage
=
Figure I-1 : Architecture des SEH
La puissance dlivre par les SEH peut varier de quelques watts pour des applications
domestiques jusqu quelques mgawatts pour les systmes utiliss dans llectrification de
petites les [4]. Ainsi, pour les systmes hybrides ayant une puissance en-dessous de 100 kW,
la connexion mixte, bus CA et bus CC, avec des batteries de stockage, est trs rpandue
[3] [5]. Le systme de stockage utilise un nombre lev de batteries pour tre capable de
couvrir la charge moyenne pendant plusieurs jours. Ce type de SEH utilise des petites sources
dnergie renouvelable connectes au bus CC. Quand il existe une production en CA, elle
vient, en principe, des gnrateurs diesels. Une autre possibilit est de convertir la puissance
Chap I : Systme dnergie hybride
12
continue en puissance alternative laide des onduleurs. Les systmes hybrides utiliss pour
des applications de trs faible puissance (en-dessous de 5 kW) alimentent gnralement des
charges CC [6].
Les systmes plus grands, ayant une puissance suprieure 100 kW, sont centrs sur
le bus CA, avec des sources dnergie renouvelable conues pour tre connectes aux
grands rseaux interconnects [7]. Si ces systmes contiennent des sous-systmes de stockage,
ce qui est rare, cest pour lisser les variations de lnergie de nature renouvelable.
Le champ dapplication des SEH est trs large et par consquent, il est difficile de
classer ces systmes. On peut nanmoins essayer de raliser un classement par gamme de
puissance (Tableau I-1). Les seuils de puissance donns ne sont que des ordres de grandeurs.
Tableau I-1 : Classification des SEH par gamme de puissance
PUISSANCE DU SEH [KW] APPLICATION
Faible: < 5
Systmes autonomes: stations de tlcommunications,
de pompage de leau, autres applications isoles
Moyenne: 10 - 250
Micro rseaux isols: alimentation dun village isol,
dun hameau, des zones rurales
Grande: > 500 Grands rseaux isols (ex: rseaux insulaires)
Les grands SEH en site isol peuvent tre classifis en fonction du degr de
pntration de lnergie renouvelable [4]. Les expressions qui permettent de calculer lindice
de pntration sont :
[ ]
[ ] kW P
kW P
I
ch
rw
ins
= Eq. I-1
et
[ ]
[ ] kWh W
kWh W
I
ch
rw
moy
= Eq. I-2
I
ins
est la pntration instantane. Elle reprsente la proportion de la puissance produite par les
sources dnergie renouvelable en instantan. P
rw
reprsente la puissance renouvelable et P
ch
,
la puissance lectrique de la charge (la charge principale, sil y a plusieurs types de charges).
I
moy
est la pntration moyenne (mesure pendant des jours, des mois ou mme des annes).
Chap I : Systme dnergie hybride
13
W
rw
reprsente lnergie renouvelable et W
ch
reprsente lnergie consomme par la charge
principale.
Une classification des grands systmes olien-diesel sur trois niveaux a t propose
en [4]. Cette classification spare les systmes en fonction du taux de pntration de lnergie
olienne et donne leurs caractristiques de fonctionnement (Tableau I-2).
Tableau I-2 : Classification des systmes olien-diesel base sur le taux de pntration de lnergie
olienne
PENETRATION NIVEAU DE
PENETRATION
CARACTERISTIQUES DE
FONCTIONNEMENT
PIC INSTANTANE MOYENNE
ANNUELLE
FAIBLE
GD fonctionne sans arrt
La production renouvelable rduit la charge
du diesel
Toute lnergie renouvelable alimente la
charge principale
Il ny a pas de systme de supervision
<50 % <20 %
MOYEN
GD fonctionne sans arrt
Commande relativement simple
Pour des niveaux levs dnergie
renouvelable, des charges secondaires sont
rparties pour assurer une charge suffisante
pour le diesel ou la production renouvelable est
rduite
50 %- 100 % 20 % - 50 %
ELEVE
GD peut tre arrt en fonction de la
production dnergie renouvelable
Systmes auxiliaires pour contrler la
tension et la frquence
Commande complexe.
100 % - 400 % 50 % - 150 %
I.3.1 Principaux composants des SEH
Les oliennes, les panneaux photovoltaques (PV) et les gnrateurs diesels sont
souvent utiliss dans les SEH. Ceux-ci peuvent aussi inclure dautres sources dnergie
comme lnergie hydraulique, marmotrice, gothermique ou lnergie contenue dans
lhydrogne (piles combustible). Les convertisseurs, les charges, les charges de dlestage et
une forme de gestion de lnergie peuvent galement faire partie dun SEH. Les batteries sont
habituellement utilises pour le stockage dnergie, mais il existe dautres options telles que le
stockage inertiel (volant dinertie) et le stockage dhydrogne. Une description des
composants habituels des SEH est donne ci-aprs.
Chap I : Systme dnergie hybride
14
I.3.1.1 Sources dnergie renouvelable
Eoliennes
Lolienne, fiable et rentable, reprsente la source dlectricit idale pour de
nombreuses applications. Les oliennes existent en plusieurs dimensions, des microsystmes
monts sur un mt aux turbines de 5 mgawatts alimentant le rseau lectrique.
Les grands systmes lectriques de CA isols peuvent utiliser les oliennes du type
connect aux grands rseaux interconnects [7][8]. La technologie largement dominante
aujourdhui est axe horizontal, turbine tripale, parfois bipale et rotor face au vent. Ces
oliennes ont des puissances comprises entre 10 kW et 5 MW et peuvent fonctionner vitesse
fixe ou vitesse variable [9]. Les deux types de machines lectriques les plus utilises pour
ces oliennes sont les machines asynchrones et les machines synchrones sous leurs diverses
variantes.
La plupart des oliennes de plus de 50 kW exploites dans les SEH utilisent des
gnrateurs asynchrones [9]. Le faible cot et la standardisation des machines asynchrones
ont conduit une large domination des gnrateurs asynchrones cage. Leur puissance
nominale peut aller au-del du mgawatt. Les machines asynchrones cage ne ncessitent
quune installation assez sommaire. En raison de la consommation de puissance ractive, elles
ne peuvent pas fonctionner indpendamment dune source qui leur fournisse la puissance
ractive. En fonctionnement vitesse fixe (vitesse lie la frquence du rseau CA auquel
elles sont connectes), elles sont souvent associes une batterie de condensateurs de
compensation de la puissance ractive et un dmarreur automatique progressif gradateur
permettant de limiter le courant dappel de la connexion au rseau (Figure I-2). Pour les
rseaux en site isol, les oliennes vitesse fixe avec gnrateurs asynchrones fonctionnent
seulement quand au moins un gnrateur diesel fonctionne, sauf sil y a dautres options
fournissant la puissance ractive et maintenant la frquence.
MA
Compensation
Multiplicateur
Figure I-2. Chane de conversion gnrateur asynchrone cage fonctionnant vitesse fixe
Chap I : Systme dnergie hybride
15
Dautres oliennes utilisent des gnrateurs synchrones. Les gnrateurs synchrones,
de plus de 200 KW, sont bien plus chers que les gnrateurs induction de la mme taille. La
connexion directe du gnrateur synchrone au rseau nest pas habituelle.
Si le gnrateur lectrique est de type synchrone ou asynchrone directement coupl au
rseau, la vitesse est sensiblement constante et le rendement arodynamique ne peut tre
maximal que pour une seule vitesse du vent. Pour obtenir une vitesse variable, diffrentes
mthodes ont t utilises [10]. Bien que les possibilits soient nombreuses pour le
fonctionnement en site isol, on rencontre trois familles de systmes : machines asynchrones
nombre de ples variable pouvant fonctionner deux vitesses, machines asynchrones cage
variateur de frquence et les machines synchrones galement variateur de frquence.
Les gnrateurs asynchrones nombre de ples variable pouvant fonctionner deux
vitesses sont construits selon le principe de deux en un , ce qui leur permet de fonctionner
alternativement deux vitesses diffrentes. Ces systmes sont constitus dun gnrateur de
petite puissance pour des faibles vitesses du vent et un autre plus grand pour des vitesses du
vent grandes (Figure I-3).
MA
Compensation
Multiplicateur
Figure I-3. Chane de conversion gnrateur asynchrone cage deux vitesses
Lintroduction de convertisseurs de puissance entre la machine et le rseau (Figure I-
4) permet de dcoupler la frquence du rseau de la vitesse de rotation de la machine et ainsi,
de faire fonctionner lolienne vitesse variable. Avec un fonctionnement vitesse variable,
la vitesse de rotation peut augmenter et diminuer en fonction de la variation du vent pour
optimiser le rendement arodynamique de lolienne.
Chap I : Systme dnergie hybride
16
MA
Multiplicateur
CA
CC
CC
CA
Figure I-4. Chane de conversion gnrateur asynchrone cage et convertisseurs de frquence.
Les oliennes gnrateur asynchrone ont toutes un multiplicateur de vitesse
mcanique pour adapter la vitesse de laroturbine la vitesse du gnrateur. Un
raccordement direct un rseau CA 50 Hz sans multiplicateur nest possible quen
imaginant une gnratrice asynchrone marche lente, munie d'une multitude de ples. Mais
cela serait trs lourd et coterait trs cher.
Au contraire, les performances des machines synchrones multipolaires, notamment en
termes de couple massique, sont trs intressantes. Leur vitesse de rotation tant diffrente de
celle lie la frquence du rseau, le convertisseur de frquence simpose. Ce type de
gnrateur inducteur bobin ncessite un systme de bagues et balais pour transmettre le
courant continu (Figure I-5). Le courant dexcitation constitue un paramtre de rglage qui
peut tre utile pour loptimisation nergtique, en plus du courant dinduit rgl par
londuleur.
MS
+
-
CA
CC
CC
CA
Figure I-5. Chane de conversion gnrateur synchrone et convertisseurs de frquence.
Pour limiter la puissance mcanique capte, les grandes oliennes utilisent diffrents
types de rgulations. Lobjectif de la rgulation de puissance est dassurer la scurit de
lolienne par vents forts, en limitant la puissance mcanique transmise par laroturbine pour
viter quelle dpasse la puissance nominale de la machine lectrique.
La plupart des grandes oliennes utilisent trois systmes de contrle arodynamique pour
limiter la puissance mcanique [9] :
Chap I : Systme dnergie hybride
17
Systme pitch ou angle de calage variable qui permet dajuster la portance
des pales la vitesse du vent pour maintenir une puissance sensiblement constante.
Systme stall ou dcrochage arodynamique ; il sagit dune solution passive,
car cest la forme des pales qui conduit une perte de portance au-del dune certaine
vitesse du vent.
Systme stall actif ou dcrochage arodynamique actif qui permet dajuster
leffet du dcrochage en fonction de la vitesse et doffrir un mode de rgulation de la
puissance relativement efficace et plus simple que le systme pitch , grce une
trs faible rotation de laxe des pales.
Les oliennes pour les petits systmes lectriques isols utilisent des machines
lectriques ayant une petite taille (10 kW). Elles reprsentent une bonne solution pour
gnrer de llectricit basse tension dans des endroits isols. Les gnrateurs fonctionnant
lnergie olienne sont gnralement utiliss pour des maisons, sur des bateaux voiles ou
pour les relais de tlcommunication.
La conception des petits systmes oliens est considrablement diffrente de celle des
oliennes connectes aux grands rseaux. La plupart des petits systmes oliens utilisent les
gnrateurs aimants permanents et fonctionnent vitesse variable, do la ncessit dun
onduleur pour obtenir une tension alternative frquence constante si ncessaire [11]. La
Figure I-6 montre ce systme de plus en plus employ par les fabricants.
MSAP
Batteries
CA
CC
Charge
Figure I-6. Eolienne aimants permanents dbitant directement sur des batteries
En cas de surcharge de la batterie, un contacteur met en court-circuit linduit de la gnratrice.
La turbine est alors arrte. Une telle configuration de lolienne nexige aucun
multiplicateur. Cette approche est approprie pour les petites oliennes, car elles fonctionnent
une vitesse de rotation beaucoup plus leve que les grands systmes oliens. Cette
approche est aussi considre plus fiable et moins chre du point de vue de lentretien [9].
Chap I : Systme dnergie hybride
18
Une autre diffrence entre les petites et les grandes oliennes est le systme de commande.
Par exemple, les petites oliennes peuvent avoir un systme mcanique de modification de
langle de calage des pales ou dorientation face au vent, alors que les grandes oliennes
utilisent des systmes de commande lectroniques. Les diffrents types de protections
utilises par les petits systmes oliens sont :
Basculement (relvement) de laxe, normalement horizontal [5] ;
Pas variable par pression du vent. Les pales en fibre se dforment et provoquent un
dcrochage ;
Dviation par rapport laxe du vent. Le rotor se trouve lgrement dcal par rapport
laxe de rotation et cre une force de dviation qui rgule la puissance
arodynamique.
Du point de vue conomique, lnergie produite par les petites oliennes est plus chre
que celle des grandes oliennes. Cependant, llectricit produite ne rivalise pas avec
llectricit du rseau, mais avec celle produite par dautres sources dnergie pour les sites
isole, telles que les gnrateurs diesels ou les panneaux photovoltaques.
Gnrateurs photovoltaques
Un gnrateur photovoltaque est constitu la base par des cellules photovoltaques.
Elles produisent de l'lectricit du moment o elles sont exposes au rayonnement solaire.
Elles ne polluent pas, nont aucune pice mobile, ne ncessitent pratiquement aucun entretien
et ne produisent aucun bruit. La cellule photovoltaque est donc un moyen sr et cologique
de produire de l'nergie. La plupart des cellules PV mesurent autour de 100 cm
2
et ne
produisent qu'une trs faible puissance lectrique, typiquement de 1 3 W avec une tension
de moins d'un volt [12][13][14]. Pour constituer des gnrateurs fournissant un courant et une
tension continus suffisants pour tre utiliss, les cellules sont regroupes en panneaux
(modules). Par exemple, un panneau produisant 12 volts peut regrouper entre 30 et 40 cellules
selon le fabricant. Lassociation de ces panneaux en srie et/ou parallle constitue le
gnrateur PV. Il est dimensionn selon la puissance ncessaire pour une installation donne.
Cependant, la constitution de ce gnrateur est, en soi, relativement dlicate, car un mauvais
choix de couplage peut entraner une perte non ngligeable de rendement.
Historiquement, les premiers systmes dlectrification avec panneaux
photovoltaques ont t bass sur la technologie CC [15]. Cette technologie a prouv son
succs dans lapprovisionnement des petits consommateurs isols avec une puissance jusqu
Chap I : Systme dnergie hybride
19
100 W [16]. Cependant, dans beaucoup dapplications, la technologie CA est ncessaire
pour alimenter des moteurs standard et dautres quipements industriels qui gnralement sont
disponibles seulement pour des CA.
Pour des applications autonomes, la plus simple chane de conversion qui puisse se
concevoir est le pompage au fil du soleil car il ny a pas de stockage lectrique (le stockage
est nanmoins prsent sous la forme deau emmagasine dans un rservoir). Un tel systme
est prsent dans la Figure I-7. Dans cette application, pour maximiser le rendement mais
aussi la puissance exploitable en cas doccultation partielle des cellules, la connexion de tous
les panneaux en srie est la solution la plus intressante [14].
Gnrateur PV
Onduleur
Pompe immerge
=
Figure I-7 : Pompage au fil du soleil de petite puissance
Dans le cas dun systme autonome semblable au prcdent mais de plus forte
puissance (quelques kW), une solution est la connexion de plusieurs panneaux en parallle
avec diodes srie danti-retour. Une autre solution est dquiper de hacheurs indpendants
(MPPT, Maximum Power Point Tracker) chaque branche ne contenant que des panneaux
connects en srie. Cette architecture permet de maximiser la puissance exploitable en cas
doccultation partielle des cellules (Figure I-8).
Gnrateur PV
Onduleur
Pompe immerge
=
=
MPPT
=
=
=
=
=
Figure I-8 : Pompage au fil du soleil de forte puissance
Chap I : Systme dnergie hybride
20
Lutilisation de MPPT permet de surveiller en continu le point de puissance maximale fournie
par un panneau ou par un champ de panneaux photovoltaques dans le but daugmenter le
rendement. Le point de puissance maximale, sur la courbe courant-tension (I-V) dun systme
photovoltaque, est celui o la puissance maximale est produite [14].
Pour alimenter en nergie lectrique un petit site isol, il est ncessaire dinclure un
systme de stockage lectrique par accumulateur lectrochimique (Figure I-9). Souvent, pour
ce type dapplication, on utilise un ou deux panneaux, soit une puissance comprise entre 50 et
100 Wc, et laccumulateur a une capacit de lordre de 50 100 Ah.
Gnrateur PV
=
=
Batteries
Charge
Figure I-9 : Petit site isol
Pour les sites isols de plus forte puissance (maison, village), on retrouve une
version volue de larchitecture prcdente [15]. Plusieurs groupes de panneaux sont quips
de MPPT pour rcuprer la puissance maximale possible et le systme de stockage a une
dimension plus importante. Un tel systme peut aussi comporter une olienne et/ou un
gnrateur diesel. Ce type de systme connect un onduleur peut fournir lutilisateur une
tension alternative conventionnelle (230V).
I.3.1.2 Autres sources dnergie renouvelable
Les centrales hydrauliques sont aujourdhui les premires sources dnergie
renouvelable. La production mondiale de petites centrales hydrauliques, trs attractives pour
une production hybride, est estime 85*10
9
kWh [14]. Les variations de dbit des cours
d'eau sur les rivires peuvent aussi tre exploites par les centrales au fil de leau.
Toutes les mers subissent deux flux et deux reflux quotidiens. Ces mouvements [12]
(nergie potentielle) peuvent tre exploits par les usines marmotrices quipes de turbines
Chap I : Systme dnergie hybride
21
spciales tournant dans les deux sens. Les courants marins peuvent galement tre exploits
par les hydroliennes (comme les oliennes utilisent l'nergie cintique de l'air), pour une
production dnergie locale. Les courants marins, contrairement aux vents, sont constants et
prvisibles.
La pile combustible, une technologie mergeante de la gnration distribue, est un
appareil lectrochimique qui fonctionne selon le procd inverse de llectrolyse [17]. Elle
restitue de leau partir dhydrogne et doxygne de lair, en produisant de llectricit, au
lieu de dissocier loxygne et lhydrogne de leau en consommant de llectricit.
La liste des sources dnergie renouvelable pouvant exploiter les ressources locales
peut tre complte par les centrales biomasse, une vritable rserve dnergie, capte
partir du soleil grce la photosynthse et les centrales gothermiques qui captent la chaleur
de la crote terrestre pour produire de llectricit.
I.3.1.3 Gnrateur diesel
Dans le cas dun systme dnergie renouvelable, la production dnergie lectrique
est ralise en fonction des ressources (vent, soleil) et non de la demande. Dans le cas des
installations autonomes, il est donc ncessaire de recourir au stockage ou dajouter un ou
plusieurs groupes lectrognes diesels.
Dans un SEH, le gnrateur classique est gnralement le moteur diesel directement
coupl au gnrateur synchrone (Figure I-10). La frquence du courant alternatif la sortie est
maintenue par un gouverneur de vitesse sur le moteur diesel [18]. Le gouverneur fonctionne
en ajustant le flux de carburant au diesel, pour garder la vitesse du moteur et la vitesse du
gnrateur constantes. La frquence du rseau est directement lie la vitesse de rotation du
gnrateur et elle est donc maintenue au niveau dsir.
MS
Gouverneur
de vitesse
Reglage
de la tension
Moteur
diesel
Embrayage
Figure I-10 : Configuration du gnrateur diesel
Chap I : Systme dnergie hybride
22
Les rseaux de courant alternatif avec diesel, tout comme ceux interconnects
fournissent pour leurs charges, deux formes d'nergie : active et ractive. Dans les processus
industriels et domestiques utilisant l'nergie lectrique, seule l'nergie active est transforme
au sein de l'outil de production, en nergie mcanique, thermique, lumineuse, etc... L'autre,
l'nergie ractive sert notamment l'alimentation des circuits magntiques des machines
lectriques (moteurs, autotransformateurs, etc...). En fait, elle nest pas consomme, mais les
courants associs la puissance ractive augmentent les pertes dans le systme. La puissance
ractive dans un systme de CA avec GD est produite par le gnrateur synchrone. Cela est
fait conjointement avec le rglage de tension, en ajustant le courant dexcitation du gnrateur
synchrone. Par consquent, dans un systme dnergie CA avec plusieurs GD, on doit avoir
au moins un GD connect au rseau, pour fixer la frquence du rseau et fournir la puissance
ractive. Il est possible de modifier le systme pour que le GD ne soit pas toujours sollicit,
mais dans ce cas dautres composants doivent tre ajouts.
Quand plusieurs gnrateurs diesels fournissent de lnergie au rseau, ceux-ci sont
connects gnralement un bus CA. Dans ce cas, un systme de commande doit tre utilis
pour une distribution correcte de la puissance fournie par les gnrateurs diesels. Ce systme
de commande peut prendre une varit de formes, le plus rpandu tant le systme de
commande numrique. Une approche est dutiliser un seul gnrateur pour fixer la frquence
(gnrateur matre) du rseau et laisser les autres tourner vitesse fixe (gnrateurs esclaves),
donc fonctionner un dbit de carburant constant. Dans les systmes traditionnels, le dbit de
carburant est fix manuellement par un oprateur. Avec les commandes modernes, le dbit
peut tre ajust pour optimiser lusage du carburant.
I.3.1.4 Systmes de stockage
Le stockage dnergie est souvent utilis dans les petits systmes hybrides fin de
pouvoir alimenter la charge pour une dure relativement longue (des heures ou mme des
jours). Il est parfois aussi utilis avec les SEH connects des grands rseaux de courant
alternatif isols. Dans ce cas, il est utilis pour liminer les fluctuations de puissance court
terme [19].
Le stockage dnergie est gnralement ralis grce aux batteries. Les batteries sont,
dhabitude, du type plomb acide. Les batteries nickel cadmium sont rarement utilises. Il y
Chap I : Systme dnergie hybride
23
a dautres formes de stockage, mais peu utilises, comme le pompage de leau, les volants
dinertie et le stockage de lhydrogne.
Dans le cas de stockage par pompage de leau, lnergie produite sert remplir un
rservoir de stockage dont leau sera turbine pour restituer lnergie [19].
Le principe du volant dinertie est simple. Il sagit demmagasiner lnergie en mettant
en rotation une masse importante [20]. Lnergie cintique obtenue peut tre restitue la
demande sous forme dnergie lectrique, en utilisant une machine lectrique en rgime
gnrateur.
L'hydrogne alimente les piles combustible. Il possde un grand pouvoir nergtique
gravimtrique (120 MJ /kg) en comparaison au ptrole (45 MJ /kg), au mthanol (20 MJ /kg) et
au gaz naturel (50 MJ /kg). Cependant, il est aussi le gaz le plus lger. Ceci pose un vritable
problme de stockage. La densit nergtique volumtrique de lhydrogne n'est intressante
qu' l'tat liquide ou comprim (700 bars). Il existe de multiples modes de stockage de
l'hydrogne : comprim, liqufi, hydrures mtalliques, charbon actif, nanofibres et nanotubes
en carbone etc. Si les deux premiers modes de stockage sont actuellement les plus utiliss, ils
sont loin dtre satisfaisants.
I.3.1.5 Systme de supervision
La plupart des systmes hybrides comportent une certaine forme de commande. Les
chargeurs des batteries, par exemple, incluent souvent un systme de commande pour
empcher la surcharge des batteries ou que leur tat de charge baisse trop. Les rseaux multi
diesel peuvent utiliser des mthodes relativement sophistiques pour grer les gnrateurs
diesels et rgler le flux de puissance.
Parfois, la commande est intgre individuellement dans chaque composant du
systme. Quelques exemples de commandes intgres sont le gouverneur de vitesse sur le
moteur diesel, le rgulateur de tension sur le gnrateur synchrone du diesel ou la commande
de lolienne.
Un autre type de commande plus global permet la surveillance de certains ou de tous
les composants (Figure I-11). Ce systme de surveillance est dhabitude automatique. Les
fonctions spcifiques peuvent inclure la commande de dmarrage et darrt des gnrateurs
Chap I : Systme dnergie hybride
24
diesels, lajustement de leurs points de fonctionnement, le chargement des batteries et la
rpartition de la puissance pour les diffrents types de charges.
Gnrateurs
Eoliens
Gnrateurs
PV
Charges
optionnelles
Charge de
Dlestage
Redresseur
Gnrateurs
Diesels
Onduleur
Systme
de
Supervision
Batteries
Figure I-11: Systme de supervision
I.3.1.6 Convertisseurs
Dans un SEH, des convertisseurs sont utiliss pour charger des batteries de stockage et
pour transformer le CC en CA et vice-versa. Trois types de convertisseurs sont souvent
rencontrs dans les SEH : les redresseurs, les onduleurs et les hacheurs.
Les redresseurs ralisent la conversion CA/CC. Dans le SEH, ils sont souvent utiliss
pour charger des batteries partir dune source CA. Ce sont des appareils relativement
simples, pas chers et bon rendement. Les onduleurs convertissent le CC en CA. Ils peuvent
fonctionner en autonome pour alimenter des charges CA ou en parallle avec des sources
CA (voir sous-chapitre I.3.2.). Les onduleurs sont autonomes lorsqu ils imposent leur propre
frquence la charge. Londuleur non autonome exige la prsence dune source CA pour
fonctionner. Il y a aussi des onduleurs qui peuvent assurer les deux rgimes de
fonctionnement : autonome ou en parallle avec un autre gnrateur. Ceux-ci sont les plus
flexibles, mais sont aussi les plus chers. Parfois, les fonctions de redresseur et donduleur sont
ralises par un seul appareil.
Les hacheurs, le troisime type de convertisseurs, permettent de raliser la conversion
CC/CC, par exemple, pour adapter la tension entre deux sources.
Chap I : Systme dnergie hybride
25
I.3.1.7 Charges
Les charges lectriques rendent utile la puissance lectrique. Il existe des charges
caractre rsistif et inductif. Les charges rsistives incluent les ampoules incandescence, les
chauffe-eau etc. Les appareils utilisant des machines lectriques sont des charges rsistives et
inductives. Elles sont les principaux consommateurs de puissance ractive. Les charges CC
peuvent avoir aussi des composants inductifs, mais les seuls effets introduits par ceux-ci sont
les variations transitoires de tension et courant pendant les changements dans le
fonctionnement du systme.
I.3.2 Configuration des SEH
Les gnrateurs lectriques dun SEH peuvent tre connects en diffrentes
configurations. Deux configurations simposent parmi les systmes dnergie hybrides
constitus par des sources dnergie renouvelable, des batteries et des gnrateurs diesels :
architecture bus CC et architecture mixte bus CC-CA [21].
I.3.2.1 Architecture bus CC
Dans le systme hybride prsent dans la Figure I-12, la puissance fournie par chaque
source est centralise sur un bus CC. Ainsi, les systmes de conversion dnergie CA
fournissent dabord leur puissance un redresseur pour tre convertie en CC. Le ou les
gnrateur(s) diesel(s) sont connects en srie avec londuleur pour alimenter les charges
CA. Les gnrateurs diesels ne peuvent donc pas alimenter les charges CA directement.
Londuleur doit alimenter les charges CA partir du bus CC et doit suivre la consigne
fixe pour lamplitude et la frquence [22]. Les batteries et londuleur sont dimensionns pour
alimenter des pics de charge, alors que le gnrateur diesel est dimensionn pour alimenter les
pics de charge et les batteries en mme temps. La puissance dlivre peut tre contrle par la
commande du courant dexcitation de la partie lectrique du gnrateur diesel ou en
incorporant un rgulateur de charge dans les sources dnergie renouvelable. Les avantages et
les dsavantages dun tel systme sont prsents ci-aprs.
Avantages :
La connexion de toutes les sources sur un bus CC simplifie le systme de
commande.
Chap I : Systme dnergie hybride
26
Le gnrateur diesel peut tre dimensionn de faon optimale, cest--dire de sorte
fonctionner puissance nominale pendant le processus de chargement des batteries
jusqu un tat de charge de 75-85 %.
Dsavantages :
Le rendement de lensemble du systme est faible, parce quune certaine quantit
dnergie est perdue cause des batteries et des pertes dans les convertisseurs.
Les gnrateurs diesels ne peuvent pas alimenter directement la charge, londuleur
doit donc tre dimensionn pour assurer le pic de charge.
Onduleur
Bus
CC
Charges CC
Charges
CA
Gnrateurs CC
Sources dnergie
renouvelable
Gnrateurs Diesels
Systme de
stockage
=
Figure I-12 : Configuration du SEH bus CC
I.3.2.2 Architecture mixte bus CC/CA
La configuration deux bus, CC et CA, est prsente dans la Figure I-13. Celle-ci
a des performances suprieures par rapport la configuration antrieure. Dans cette
configuration, les sources dnergie renouvelable et les gnrateurs diesels peuvent alimenter
une partie de la charge CA directement, ce qui permet daugmenter le rendement du systme
et de rduire la puissance nominale du GD et de londuleur. Le ou les gnrateur(s) diesel(s)
et londuleur peuvent fonctionner en autonome ou en parallle en synchronisant leurs tensions
en sortie. Les convertisseurs situs entre les deux bus (le redresseur et londuleur) peuvent
tre remplacs par un convertisseur bidirectionnel, qui, en fonctionnement normal, ralise la
conversion CC/CA (fonctionnement onduleur) [21][22]. Quand il y a un surplus dnergie de
la part du gnrateur diesel, il peut aussi charger les batteries (fonctionner en redresseur).
Londuleur bidirectionnel peut alimenter les pics de charge quand le gnrateur diesel est
surcharg.
Chap I : Systme dnergie hybride
27
Convertisseur
bidirectionnel
Bus
CA
Charges
CA
=
Bus
CC
Charges
CC
Gnrateurs CC
Sources dnergie
renouvelable
Gnrateurs Diesels
Systme de
stockage
Gnrateurs CA
Sources dnergie
renouvelable
Gnrateurs Diesels
=
Redresseur
=
Onduleur
Figure I-13 : Configuration du SEH deux bus CC et CA
Avantages :
Le GD et londuleur peuvent fonctionner en autonome ou en parallle. Quand le
niveau de la charge est bas, lun ou lautre peut gnrer le ncessaire dnergie.
Cependant, les deux sources peuvent fonctionner en parallle pendant les pics de
charge.
La possibilit de rduire la puissance nominale du GD et de londuleur sans affecter la
capacit du systme dalimenter les pics de charge.
Dsavantage :
La ralisation de ce systme est relativement complique cause du fonctionnement
parallle (londuleur doit tre capable de fonctionner en autonome et non-autonome en
synchronisant les tensions en sortie avec les tensions en sortie du GD).
I.3.3 Dimensionnement des SEH
La conception des SEH exige la slection et le dimensionnement de la combinaison la
plus approprie des sources dnergie, des convertisseurs et du systme de stockage, ainsi que
limplmentation dune stratgie de fonctionnement efficace [23][25]. De plus, pour obtenir
un taux de pntration important des sources dnergie renouvelable, sans la dgradation de la
qualit de lnergie fournie, une tude de dimensionnement du systme hybride simpose
[24].
Chap I : Systme dnergie hybride
28
Les logiciels de dimensionnement sont des outils indispensables pour lanalyse et la
comparaison des diffrentes combinaisons possibles des sources utilises dans les SEH. Les
principaux facteurs du dimensionnement sont :
Les conditions environnementales du site (vitesse du vent, clairement nergtique,
temprature, humidit) ;
Le profil de charge ;
Les prfrences et les demandes du client ;
Les ressources financires ;
La disponibilit de la technologie et le support technique.
Il existe plusieurs logiciels de dimensionnement et de simulation des SEH [26][27] :
HOMER, SOMES, RAPSIM, SOLSIM, INSEL... Tous ces logiciels ont pour but doptimiser
les systmes hybrides, mais les stratgies doptimisation sont diffrentes. Une brve
description de chaque outil est donne ci-aprs :
HOMER cest un outil dvelopp par National Renewable Energy Laboratory (NREL),
capable de dimensionner et doptimiser un systme hybride contenant diffrents composants :
olienne, PV, micro hydrocentrale, diesel, rseau, pile combustible et batteries. HOMER
excute des simulations pour toutes les configurations possibles du systme dans le but de
vrifier si elles sont ralisables. HOMER estime ensuite le cot dinstallation et de
fonctionnement du systme et propose une liste des configurations, classes par rapport au
cot de leurs cycles de vie.
SOMES cest un outil de simulation et doptimisation des systmes dnergies
renouvelables. SOMES est dvelopp par la Utrecht University, au Pays Bas. Les composants
disponibles sont : PV, olienne, gnrateur diesel, rseau lectrique, batteries de stockage et
plusieurs types de convertisseurs. La simulation est ralise sur une base de temps horaire. Le
systme optimal est trouv en comparant les cots de plusieurs systmes, dans les limites
dfinies par lutilisateur.
RAPSIM ce logiciel a t dvelopp par la Murdoch University Energy Research Institute
dAustralie. Il est conu pour simuler des systmes dnergies alternatives tels que des
gnrateurs PV, des oliennes et des gnrateurs diesels. Un dimensionnement optimal est
ralis par ttonnement. Les utilisateurs changent les paramtres du systme (nombre de
Chap I : Systme dnergie hybride
29
batteries, doliennes, puissance des gnrateurs diesels) et jugent le rsultat pour choisir la
meilleure solution rpondant leurs besoins.
SOLSIM est dvelopp au Fachhochschule Konstanz, en Allemagne. Cest un outil de
simulation qui permet aux utilisateurs de concevoir, analyser et optimiser des systmes
connects ou pas un rseau et des SEH. Les sources dnergie disponibles sont : des
panneaux PV, des oliennes, des installations de biogaz ou de biomasse, des batteries et des
gnrateurs diesels. SOLSIM est un progiciel qui comporte des outils diffrents : un
programme de simulation gnral appel SOLSIM, une unit doptimisation de langle
dinclinaison des panneaux PV appele SolOpti, une unit de calcul des cots du cycle de vie
appele SolCal et lunit simulant des gnrateurs oliens appele SolWind.
INSEL est dvelopp par la University of Oldenburg dAllemagne. Il ralise la simulation
des systmes dnergie renouvelable. Cest un logiciel de simulation bas sur des diagrammes
blocs o chaque bloc reprsente un composant dune puissance prdtermine. Les
utilisateurs doivent slectionner des blocs partir dune bibliothque et les interconnecter
pour dfinir les systmes dnergie tudier.
I.3.4 Problmes rencontrs dans le fonctionnement des SEH
Les systmes dnergie en site isol rencontrent en gnral les mmes problmes que
les rseaux faibles [28]. Ces difficults, qui ne se prsentent pas dans les grands rseaux
interconnects, sont en gnral causes par :
Les variations de lnergie dorigine renouvelable (indpendamment de la charge),
Le manque de connaissances dans le domaine de la qualit de lnergie en rseau
faible.
Compte tenu de la nature stochastique des sources dnergie renouvelable, la difficult
principale des SEH comportant ce type de sources est de pouvoir produire chaque instant
lnergie demande par la charge. Le moyen le plus simple dviter une augmentation du
risque de ne pas satisfaire compltement la charge est de faire fonctionner les sources
dnergie renouvelable et les gnrateurs diesels en parallle, de faon continue (le gnrateur
diesel fonctionne sans arrt) [29]. Dans ce type de fonctionnement, les sources dnergie
renouvelable agissent comme une charge ngative, en rduisant la charge moyenne des
Chap I : Systme dnergie hybride
30
gnrateurs diesels. Ceux derniers peuvent fonctionner une puissance trs basse (Figure I-
14), mais lconomie de carburant est modeste cause du rendement trs faible (en
fonctionnement vide, la consommation de carburant sestime 25-30 % de la consommation
pleine charge) [30]. Ainsi, garder un moteur diesel au rgime de ralenti pour une demande
de puissance nulle suppose une consumation de carburant non ngligeable.
0 20 40 60 80 100
0
5
10
15
20
25
30
35
R
e
n
d
e
m
e
n
t
(
%
)
Puissance (%)
Figure I-14 : Courbe du rendement dun moteur diesel ayant une puissance nominale de 75 KW
Si lnergie renouvelable est suffisante pour alimenter la plupart de la charge, la
quantit de carburant conomis peut alors tre augmente en faisant fonctionner les
gnrateurs diesels par intermittence [3]. En fonctionnement intermittent, les gnrateurs
diesels dmarrent et sarrtent en fonction de la variation de lnergie renouvelable et de la
charge. Le nombre de cycles dmarrage/arrt des gnrateurs diesels peut, par consquent,
tre trs lev. Le problme dans ce cas est lusure prmature des GD et de leurs dmarreurs
[30] [21]. Un autre problme devant tre pris en compte quand le gnrateur diesel fonctionne
par intermittence est le temps ncessaire pour le dmarrage et larrt. Le systme peut, par
exemple, seffondrer subitement pendant le dmarrage du gnrateur diesel, si lnergie
renouvelable diminue plus vite que le temps ncessaire pour la phase de dmarrage.
Il arrive parfois que la production dnergie renouvelable soit plus importante que la
consommation de la charge. Si lexcs dnergie dans le rseau ne peut pas tre limin, la
production dnergie renouvelable doit alors tre limite ou mme arrte. En gnral, les
systmes sans stockage utilisent une charge de dlestage pour maintenir lquilibre
nergtique et la stabilit de la frquence. Dautres applications ncessitent des systmes de
commande supplmentaires pour maintenir la qualit de la tension. Tous ces dispositifs, tels
que les charges de dlestage et les systmes de commande, augmentent le cot
dinvestissement qui peut ne pas tre justifi par les avantages du systme hybride. Seule une
Chap I : Systme dnergie hybride
31
stratgie de commande adquate peut permettre dintgrer de manire optimale diffrents
composants et donc de rendre le systme rentable.
La dynamique des gnrateurs dnergie renouvelable peut aussi causer des problmes
dans le fonctionnement des SEH. Par exemple, le dmarrage dune olienne quand la vitesse
du vent est leve. Dans ce cas, la puissance produite par lolienne atteint presque
instantanment la puissance nominale du gnrateur. Ces changements rapides dans la
production dnergie peuvent gnrer des problmes de qualit dnergie (variation de tension
et de frquence) et mme larrt complet du systme.
Les gnrateurs asynchrones, largement utiliss dans les oliennes, ont besoin dune
quantit importante de puissance ractive, surtout pendant la phase dexcitation (dmarrage).
Sil ny a pas assez de sources de puissance ractive dans les SEH et une ou plusieurs
oliennes dmarrent, laugmentation soudaine de la consommation de puissance ractive
provoque des creux de tension et le systme dcroche. Dautres sources de perturbations
pouvant gnrer des creux de tension sont les courts circuits [31]. Ceux-ci peuvent provoquer
leffondrement des SEH, mais aussi une phase de r-excitation des gnrateurs asynchrones
connects au systme.
Une autre perturbation qui peut poser des problmes est la surtension. Une surtension
peut tre cause par un court circuit, larrt dune charge importante ou la connexion dun
banc de condensateurs.
Un inconvnient majeur dans un SEH connect en rseau triphas isol est le
dsquilibre de tension entre les phases. Un rcepteur lectrique triphas dsquilibr ou des
rcepteurs monophass dsquilibrs aliments par un rseau isol triphas peuvent conduire
des dsquilibres de tension. Ces dsquilibres provoquent des couples de freinage parasites
et des chauffements supplmentaires dans les machines tournantes CA.
Du point de vue de la continuit de la production et de la qualit de lnergie, les
facteurs pouvant affecter le fonctionnement dun SEH sont rsums ci-aprs :
Les variations de la charge long terme : les rgions isoles avec des petits rseaux
lectriques peuvent subir des changements rapides dans leurs besoins en lectricit
(gnralement, la demande augmente).
Chap I : Systme dnergie hybride
32
Les variations de la charge court terme : en gnral, la demande en lectricit varie
beaucoup sur des intervalles de temps assez courts, de lordre de quelques minutes.
Des valeurs minimales sont suivies par des pics.
Les ressources dnergie renouvelable : les ressources, comme le vent et le soleil, sont
stochastiques par leur nature, ont des caractristiques locales et sont trs difficiles
prdire.
Les perturbations du rseau : les dfauts, tels que les court circuits, peuvent non
seulement arrter les systmes, mais aussi, au pire des cas, dtruire certains
composants.
I.3.5 Commande des SEH
Le problme principal dans la commande de SEH est de pouvoir fournir lnergie
demande par la charge, malgr les grandes variations de lnergie produite, tout en
maintenant la frquence et la tension du bus CA dans des limites acceptables. Les variations
de la production sont causes par la nature stochastique des ressources renouvelables.
Deux aspects principaux doivent tre pris en compte dans la commande du SEH :
1. La stratgie de fonctionnement, qui implique des dcisions lies au flux dnergie
lchelle de plusieurs heures ou jours et des actions pour amliorer le fonctionnement
du systme,
2. La qualit de lnergie, lchelle des secondes ou millisecondes. Cela concerne la
stabilit de la frquence et de la tension, les protections, etc.
I.3.5.1 Stratgie de fonctionnement
La stratgie de fonctionnement est un algorithme qui permet au systme de
supervision dun SEH de dcider combien et quels gnrateurs il faut mettre en marche,
quelles charges sont connectes et comment utiliser le stockage, si disponible [22][32].
Le fonctionnement dun SEH dpend des paramtres suivants :
Le profil de charge : les variations diurnes, les variations saisonnires, les pics et les
creux, etc.
Chap I : Systme dnergie hybride
33
Les caractristiques des ressources renouvelables : les valeurs moyennes, lcart type,
la frquence des vnements, les valeurs extrmes, les variations diurnes et
saisonnires, etc,.
Les caractristiques des gnrateurs classiques : le type de carburant, les limites de
fonctionnement, etc.
La configuration du systme : le nombre et les types de composants (les sources
dnergie renouvelable, les sources classiques, les charges contrlables, les types de
stockage, les convertisseurs de puissance, etc.)
Les normes de qualit de lnergie : les exigences en ce qui concerne les variations de
la frquence et de la tension.
Par consquent, certaines stratgies de fonctionnement peuvent tre plus efficaces dans des
applications particulires, en fonction des objectifs du systme et les caractristiques
prsentes ci-dessus. Une brve description de quelques stratgies de fonctionnement est
donne ci-aprs :
Gestion du stockage
Deux types de stockage [34] sont utiliss dans les SEH : le stockage court terme et le
stockage long terme.
La stratgie de stockage court terme, Peak Shaving Strategy , permet de filtrer les
fluctuations des nergies renouvelables et/ou de la charge. Cette stratgie rduit galement le
nombre de cycles dmarrage/arrt des gnrateurs diesels, donc la consommation de
carburant.
Le stockage long terme, Cycle Charge Strategy est utilis pour alimenter la
charge sur une priode de temps plus longue. Cette stratgie, permet damliorer lquilibre
nergtique et de rduire les cycles dmarrage/arrte des GD et donc, la consommation de
carburant. Avec cette stratgie, le GD est arrt jusqu ce que ltat de charge du systme de
stockage atteigne un niveau minimal. Une fois ce seuil atteint, le GD redmarre et reste en
fonctionnement jusqu ce que ltat de charge du systme de stockage atteigne un niveau
maximal et le cycle se rpte encore une fois et ainsi de suite.
Gestion des charges
La stratgie de gestion des charges peut aussi tre court terme et long terme [33].
Les deux types de stratgie utilisent les charges pour faire varier la demande dnergie. Ainsi,
Chap I : Systme dnergie hybride
34
les charges sont connectes et dconnectes par ordre de priorit (Figure I-15). Les pompes
eau et les units de dsalinisation sont des exemples de charges diffres de faible priorit en
fonctionnement normal. Les charges optionnelles sont toutes des charges ayant une utilit et
pouvant tre utilises durant lexcdent dnergie qui autrement serait dissip.
Energie gnre
par SEH
Charge
optionnelle
Batteries
Charge
diffre
Charge de
dlestage
Charge
principale
Excs
dnergie
1
ere
priorit
2
me
priorit
3
me
priorit
4
me
priorit
Figure I-15 : Diagramme des priorits des charges
La stratgie de contrle court terme connecte et dconnecte les charges du systme
en fonction du dpassement de certains seuils fixes pour la frquence du bus CA. Les
charges sont connectes de manire progressive, selon les variations de la frquence. La
charge de dlestage (dump load) est une charge spciale dont la puissance peut tre modifie
en fonction de la dviation de frquence. Elle peut aider rgler la frquence du rseau dans
des conditions de surplus dnergie.
La gestion long terme assure lquilibre nergtique sur des intervalles de temps
importants. Les charges diffres et optionnelles ont en gnral une priorit rduite pendant
une partie de la journe. Elles doivent tre connectes seulement quand leur rgime de priorit
est lev. Dans le cas du pompage de leau, quand le niveau de leau dans le bassin est bas, la
pompe acquiert une priorit leve et elle doit dmarrer. La stratgie de gestion des charges
peut aussi tre utilise pour rduire les pertes nergtiques du GD.
Rserve tournante
La rserve tournante est dfinie en [35] comme tant lexigence du systme de
commande dfinie par la capacit des gnrateurs classiques de couvrir les changements
immdiats causs par larrt des gnrateurs dnergie renouvelable et par laugmentation
soudaine de la charge. En effet, la rserve tournante dtermine la capacit instantane de
Chap I : Systme dnergie hybride
35
rserve minimale du GD en fonction des prvisions de la production dnergie renouvelable et
de lvolution de la charge. Une rserve dnergie doit tre toujours disponible pour viter
leffondrement du systme lors dune rduction soudaine de la production dnergie
renouvelable.
Temps de fonctionnement minimal
Cette stratgie consiste maintenir le GD en fonctionnement pour une dure minimale
prdfinie en fonction de la variabilit de la charge ou de la variabilit de lnergie
renouvelable [34]. Celle-ci est utilise pour rduire le nombre de dmarrages/arrts quand la
puissance nette (la diffrence entre la puissance consomme par la charge et la puissance
renouvelable) varie beaucoup. La minimisation du nombre de dmarrages/arrts du GD peut
permettre dviter lusure des moteurs diesels et leurs dmarreurs et en mme temps rduire la
consommation de carburant.
Hystrsis
Cette stratgie est souvent utilise pour commander la dconnexion du gnrateur
diesel [33]. Le GD est arrt seulement si la puissance renouvelable est suprieure la
demande de la charge. Ce surplus minimal dnergie (ou hystrsis) peut tre mesur partir
de la variation de frquence du rseau quand cette frquence est fixe par le GD utilisant un
rgulateur type proportionnel (P) et partir de son niveau de charge quand il utilise un
rgulateur type proportionnel-integral (PI).
I.3.5.2 Qualit de lnergie lectrique produite par les SEH
Le terme qualit de lnergie lectrique fait rfrence la stabilit de la tension,
la stabilit de la frquence du rseau et labsence, dans le rseau lectrique, de diffrents
phnomnes lectriques (comme, par exemple, le flicker ou des distorsions harmoniques). La
figure I-16 montre une classification de ces perturbations en fonction de leurs caractristiques
[40].
Bien quil n y ait pas de normes internationales spcifiques pour les systmes de
gnration en site isol, les caractristiques du rseau isol doivent tre semblables aux
caractristiques des grands rseaux interconnects. Les consommateurs qui sont connects
aux rseaux isols, tout comme ceux connects aux grands rseaux interconnects, utilisent
Chap I : Systme dnergie hybride
36
les mmes appareils. Par, consquent, les exigences de qualit de lnergie sont gnralement
les mmes.
Variations de tension Flicker Harmoniques Transitoires
Tension Frquence Interruptions
Qualit de lnergie
Figure I-16 : Classification des perturbations du point de vue qualit de lnergie
La plupart des mesures et dfinitions utilises dans les normes sont bases sur
lanalyse de la frquence et de la tension. La norme europenne EN50160 [36] inclut des
recommandations pour les valeurs de la tension des rseaux isols, c'est--dire des rseaux
non relis un grand rseau interconnect.
Plusieurs tudes ont t ralises sur la qualit de lnergie lectrique des systmes
isols comportant des sources dnergie renouvelable. Larsson [37] prsente des mesures
exprimentales de la qualit de lnergie lectrique pour les systmes olien-diesel. La
problmatique des systmes hybrides olien-diesel est analyse aussi par Sharma en [39].
Mulijadi dans [38] ralise une analyse de la configuration olien-diesel et des diffrents types
de charges du point de vue de la qualit de lnergie lectrique. Dans [28] Dindner prsente
plusieurs stratgies de contrle de la tension dans les rseaux faibles avec des systmes
oliens.
Chap I : Systme dnergie hybride
37
I.4 Conclusions
Une brve description des SEH a t ralise dans ce chapitre. Dans ce contexte, les
principales notions lies la technologie utilise dans les SEH ont t donnes. Notre travail
portant sur un SEH compos dune olienne, des panneaux photovoltaques et dun gnrateur
diesel et batteries de stockage, une attention particulire a t consacre ce type de sources
et de stockage. Les diffrents types darchitectures existants, les outils de dimensionnement,
ainsi que les problmes et les stratgies de commande habituelles des SEH ont galement t
prsents.
Le dimensionnement et le fonctionnement des composantes du SEH doivent tenir
compte des variations de la charge et des ressources renouvelables disponibles pour
maximiser lutilisation des ressources renouvelables. Dans ce but, les sources du SEH tudi
sont dimensionnes puis modlises dans le chapitre suivant.
CHAP. II : DIMENSIONNEMENT, MODELISATION
ET COMMANDE DES COMPOSANTS DU SEH
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
41
CHAP. II : DIMENSIONNEMENT, MODELISATION ET
COMMANDE DES COMPOSANTS DU SEH
II.1 Introduction
Les SEH utilisent diffrentes sources dnergie comme lolien, le photovoltaque et le
gnrateur diesel. Ce type de systmes peut reprsenter une solution pour les rgions
loignes dun grand rseau interconnect. Dans ce contexte, un dimensionnement correct et
rentable du SEH, ainsi que ltude du comportement dynamique du systme sont trs
importants.
Ce chapitre prsente larchitecture du SEH, obtenue aprs une tude de
dimensionnement. Cette architecture inclut une olienne, des panneaux PV, un gnrateur
diesel, un systme de stockage et des convertisseurs pour interconnecter les sources. Le
dimensionnement d'un tel systme implique la dtermination des caractristiques nominales
des sources et du systme de stockage, pour des ressources nergtiques et des contraintes
dutilisation donnes. Nous avons dvelopp un modle et une stratgie de commande pour
chaque source dnergie du SEH. Tous les composants du systme aussi que leurs sous-
ensembles sont traits de manire modulaire pour une plus grande flexibilit. Les modles
dvelopps doivent permettre une analyse dynamique dtaille sur des horizons allant de
quelques millisecondes plusieurs secondes.
II.2 Dimensionnement du SEH
Le logiciel HOMER [41], dcrit dans la section I.3.3, t utilis pour dimensionner
le SEH tudi dans le cadre de ce travail.
La configuration du SEH dpend videmment des ressources nergtiques disponibles
ainsi que des contraintes de lutilisation. Ceci requiert une campagne de mesure et une analyse
pralable des spcificits du site qui ne pouvaient pas faire lobjet dune tude complte dans
le cadre de cette thse. Pour crer une base de rfrence pour notre tude nous avons choisi
dadopter des donnes disponibles et accessibles tous.
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
42
Les ressources locales (vitesse du vent et clairement) et le profil de charge sur une
anne utiliss pour raliser le dimensionnement du SEH sont illustrs dans les Figures II-1, II-
2 et II-3. Ces donnes sont disponibles dans la base de donnes fournie avec le logiciel [41].
Les Figures II-1 et II-2 prsentent les profils de vent et dclairement avec une valeur
moyenne de la vitesse du vent de 7 m/s et respectivement une valeur moyenne de 4.8
kWh/m
2
/j pour lclairement. Le profil de charge alimenter en lectricit est illustr dans la
Figure II-3. Il sagit dune charge avec une valeur moyenne annuelle de 575 kWh/j et un pic
de puissance instantane de 40,4 kW.
Figure II-1 : Profil du vent
Figure II-2 : profil dclairement
Figure II-3 : Profil de charge
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
43
Les options de disponibilit technologique retenues pour cette tude de
dimensionnement sont prsentes dans le Tableau II-1.
Tableau II-1 : Options technologiques
PUISSANCE DISPONIBILITE
TECHNOLOGIQUE
[kW]
NOMBRE
Eolienne 10/22 0, 1, 2/0, 1
Surface PV 18/20 1
GD 30 0, 1
Onduleur/Redresseur 75, 90, 100 1/1
STOCKAGE CAPACITE
Batteries 230 Ah 20, 30, 40
Le fonctionnement du SEH est simul laide du logiciel HOMER qui ralise les
calculs dquilibre nergtique par heure, pour les 8760 heures dune anne. Heure aprs
heure, la demande dnergie que doit satisfaire le SEH est compare lnergie
potentiellement disponible et le flux d'nergie est ajust pour chaque composant du systme
[41]. Ainsi, pour chaque heure, on peut suivre le fonctionnement du GD, ainsi que le cycle de
charge et de dcharge des batteries. Pour cette tude de dimensionnement, le GD est utilis
avec la stratgie de stockage long terme, Cycle Charge Strategy (voir section I.3.5.1)
[34].
Comme le modle du SEH est introduit dans le logiciel avec les options de
disponibilit technologique, le cot des composants et la disponibilit des ressources,
HOMER utilise ces entres pour simuler diffrentes combinaisons des composants. Les
calculs dquilibre nergtique sont excuts pour chaque configuration du SEH considre
[48]. Les configurations obtenues sont slectionnes en fonction de leur faisabilit, du cot
d'installation. La rentabilit du fonctionnement est value sur la vie du projet, estime a
priori 25 ans. Les calculs du cot du SEH prennent en compte des cots tels que le capital et
lintrt, lamortissement, les frais de fonctionnement, lentretien et le carburant. Toutes ces
estimations des cots sont dtailles dans lAnnexe A.
Dans la Figure II-4, sont illustrs les rsultats issus de ltude de dimensionnement,
aprs avoir simul toutes les configurations possibles du SEH. La figure montre que dans les
conditions de charge, cot des composants et disponibilit des ressources prsentes
antrieurement, le systme optimal ou le moins cher inclut Eolienne, PV, GD et batteries
quand le prix du carburant dpasse 0,7 $/l (lclairement est fix 4,8 kWh/m
2
/j).
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
44
Figure II- 4: Composition optimale du SEH en fonction de la vitesse du vent et du prix du carburant
Les rsultats de simulation sont fournis sous la forme dune liste des configurations,
classes par le cot net actuel (appel le cot du cycle de vie). Ce cot permet de comparer les
diffrentes options pour la conception du systme. Les rsultats fournissent aussi une
valuation du SEH du point de vue nergtique. La composition du systme optimal (Figure
II-5) dans les conditions spcifies dans le Tableau I-1 est :
Surface PV: 18 kW
Eolienne: 1 22kW
Diesel: 130 kW
Batteries: 40 (230 Ah)
Onduleur: 175 kW
Redresseur: 175 kW
Figure II-5 : Architecture du SEH
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
45
La production et la consommation dnergie sur une anne sont dtailles dans le
Tableau II-2 et II-3.
Tableau II-2 : Energie annuelle produite Tableau II-3 : Energie annuelle consomme
PRODUCTION FRACTION
SOURCE
(kWh/an)
Eolienne 98,016 40%
Surface PV 30,991 12%
GD 119,040 48%
Total 248,046 100%
La puissance moyenne mensuelle produite par les sources du SEH est illustre dans la
Figure II-6.
Figure II- 6: Puissance moyenne mensuelle produite par chaque source
Dautres dtails sur la production de chaque source du SEH sont donns dans
lAnnexe A.
II.3 Modlisation et commande des composants du SEH
Larchitecture complte du SEH tudi dans le cadre de ce travail est illustre dans la
Figure II-7. Tous ses composants (les sources, les batteries et les convertisseurs) seront
modliss par la suite. Leurs paramtres sont donns dans lAnnexe B.
Consumation
CHARGE
(kWh/an)
Fraction
Charge
CA
209,871 100%
Total 209,871 100%
Variable Valeur
Fraction renouvelable: 0.520
Excs dnergie: 38.176 kWh/an
Charge non satisfaite 4 kWh/an
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
46
=
=
=
3
PV
Eolienne
GD
Batteries
Charge
=
=
=
3
3
Onduleur
Figure II-7 : Schma de principe du SEH
II.3.1 Systme olien
Les oliennes convertissent lnergie cintique du vent en nergie mcanique, puis en
lectricit. Les pales du rotor olien captent une partie de lnergie contenue dans le vent et la
transfrent au moyeu qui est fix sur l'arbre de l'olienne. Celui-ci transmet ensuite lnergie
mcanique au gnrateur lectrique. En gnral, la transmission de puissance entre le moyeu
et le gnrateur lectrique est ralise travers un multiplicateur de vitesse de rotation.
Le schma-bloc de lolienne tudie dans le cadre de ce travail est prsent dans la
Figure II-8. Il sagit dune olienne axe horizontal, trois pales et avec un gnrateur cage
dcureuil vitesse variable.
Rotor
olien
Transmission
vent
Gnrateur
Convertisseur + Systme
de Commande
Puissance
lectrique
Signaux
lectriques
Arbre lent
Arbre rapide
Figure II-8 : Structure du systme olien
La modlisation de lolienne exige la modlisation du vent, du comportement
arodynamique des pales, du systme mcanique de transmission, du gnrateur lectrique, du
convertisseur de puissance et du systme de commande.
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
47
Le vent est la variable dentre du systme olien. Sa mesure exacte la hauteur du
moyeu est assez complexe. Cependant, le vent peut tre reprsent par une grandeur
stochastique dfinie par des paramtres statistiques. La modlisation du vent a dj fait lobjet
de nombreux travaux [42][43] et par consquent, elle ne sera pas dtaille dans le cadre de ce
travail.
II.3.1.1 Conversion arodynamique
Le rotor olien est un systme de conversion dnergie qui transforme l'nergie
cintique des masses d'air en mouvement en nergie mcanique disponible sur larbre. Cette
nergie cintique est proportionnelle la masse dair qui se dplace une vitesse donne.
Lextraction de lnergie se fait donc par un ralentissement de l'air qui traverse le rotor, par un
mcanisme de transformation des forces agissant sur les pales. Schmatiquement, il en rsulte
que, selon les principes de la mcanique des fluides, la veine fluide traverse le moteur olien
en slargissant [44] (Figure II-9).
Vent
Section amont de
la veine fluide
Surface balaye
par le rotor olien
Section aval de
la veine fluide
Figure II-9 : Veine fluide traversant le rotor olien
Le comportement arodynamique du rotor olien peut tre dcrit par la thorie du
disque actuateur [45][46], en considrant que lair est incompressible, que le fluide scoule
de manire continue et que les grandeurs tudies ont la mme valeur sur une section donne
du tube de courant dair [47].
Pour capter l'nergie cintique des masses d'air en mouvement, les pales du rotor olien se
prsentent obliquement au vent avec un angle appel angle de calage, , provoquant la
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
48
rotation par un effet de vis ou de tire-bouchon. La puissance qui peut tre rcupre est dcrite
par lquation :
p v t
C V R P
3 2
2
1
= Eq. II-1
o est la densit de lair, R est le rayon du rotor olien, V
v
est la vitesse du vent et C
p
est le
coefficient de puissance (un paramtre sans dimension qui exprime lefficacit du rotor olien
dans la transformation de lnergie cintique du vent en nergie mcanique). Ce coefficient
est fonction de langle de calage et de la vitesse spcifique , dfinie par :
v
t
V
R
= Eq. II-2
o
t
est la vitesse de rotation du rotor olien.
Le coefficient de puissance a une valeur thorique maximale donne par la limite de
Betz [1] : 593 , 0
max ,
=
p
C
Pour lolienne tudie dans le cadre de ce travail, langle de calage est fixe et la
grandeur de sortie du rotor olien est le couple. Ce dernier peut tre calcul partir de la
puissance capte et de la vitesse de rotation du rotor olien :
t v p
v
p
t
v
t
t
t
C V R C
V R
C
V R P
T
2 3
2 3 3 2
2
1
2
1
2
1
= =
= Eq. II-3
o C
t
est le coefficient de couple. Ce dernier et le coefficient de puissance sont lis par la
relation :
( ) ( )
p t
C C = Eq. II-4
La modlisation du rotor olien exige la connaissance de la caractristique C
t
()
dpendant des caractristiques gomtriques et du profil des pales. Cette expression peut tre
obtenue partir de mesures en soufflerie ou par calcul numrique en utilisant la thorie de
llment de pale [44].
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
49
Pour lolienne modlise dans le cadre de ce travail, la caractristique du C
t
() est obtenue
partir de la thorie de llment de pale [48]. Les dtails de calcul sont donns dans lAnnexe
C.
La courbe C
t
() obtenue par mesure ou par calcul peut tre facilement approche par
rgression polynomiale [49]. Les dtails du bloc modlisant le couple dvelopp par la turbine
olienne sont prsents dans la Figure II-10.
v
t
V
R
=
( )
t v t
C V R T
2 3
2
1
=
C
t
V
v
t
T
t
Figure II-10 : Modlisation du couple olien
II.3.1.2 Transmission
Tous les lments de la transmission, cest--dire larbre lent ct rotor olien, le
multiplicateur et larbre rapide ct gnrateur, sont inclus dans le bloc Transmission
(Figure II-8). Le multiplicateur transforme la vitesse lente de larbre du rotor olien en une
vitesse beaucoup plus leve, compatible avec la plage de vitesse de fonctionnement du
gnrateur lectrique.
Le rotor olien a un moment dinertie beaucoup plus grand que celui du gnrateur
lectrique. Cette inertie agit lors des changements de vitesse en stockant lnergie quand le
rotor olien acclre et en la restituant pendant la dclration. Ce phnomne soppose donc
aux variations rapides de vitesse de rotation de larbre du rotor olien. Linertie agit ainsi
comme un filtre passe-bas [50].
Certains travaux proposent des modles complexes permettant de modliser la
dynamique des systmes de transmission flexible. Un modle six masses a t propos par
[51][52]. Les six masses correspondent aux inerties des trois pales du rotor olien et aux
inerties du moyeu, du multiplicateur et du gnrateur.
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
50
Dautres auteurs proposent une simplification du modle six masses en rduisant leur
nombre deux. Une masse correspond linertie du rotor olien et lautre, plus petite,
correspond linertie du gnrateur. Cette reprsentation permet de modliser la premire
frquence de rsonance du train de puissance [43].
Le modle retenu pour cette tude est le modle rigide [53][54]. Celui-ci dcrit la
transmission laide de linertie du rotor olien, J
t
, linertie du gnrateur, J
m
, et dun
multiplicateur avec un rapport de multiplication N (Figure II-11).
Tt, Jt
Tem, Jm 1
N
t
m
NTem, N
2
Jm
t
Tt, Jt
Figure II-11: Couplage mcanique
Tous les paramtres utiliss pour modliser la transmission sont ramens laxe lent.
Ainsi, le couple sur larbre du rotor olien T
t
et le couple lectromagntique T
em
sont lis par
la relation :
t em t
t
D T N T
dt
d
J =
Eq. II-5
avec :
m t
J N J J
2
+ = Eq. II-6
m t
D N D D
2
+ = Eq. II-7
t
m
N
= Eq. II-8
o D
t
, D
m
sont respectivement les coefficients de frottement ct rotor olien et ct machine
lectrique ; J et D sont linertie et le coefficient de frottement quivalents totaux ramens sur
larbre lent.
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
51
II.3.1.3 Machine asynchrone cage dcureuil
Grce aux nombreux avantages quelle a par rapport aux autres types de machines
lectriques (robustesse, maintenance, prix), la machine asynchrone cage dcureuil est
intressante pour lutilisation comme gnratrice couple une turbine olienne [55].
La modlisation de la machine asynchrone cage dcureuil a dj fait lobjet de
nombreux travaux [56][57]. Le modle le plus adquat pour tudier le comportement
dynamique de la machine et pour limplmentation des lois de commande est le modle bas
sur la thorie des phaseurs spatiaux. La machine est modlise entrefer constant, le stator
porte un enroulement triphas symtrique et le rotor est en court-circuit. On fait les
hypothses suivantes :
caractristique magntique linaire,
absence de pertes dans le circuit magntique,
absence d'effet pelliculaire,
couple de pertes par frottement proportionnel la vitesse.
La tension applique aux enroulements est gale la somme de la chute de tension,
aux bornes de la rsistance de phase R et de la tension lectromotrice induite cause de la
variation de flux sur la phase en cause. Ainsi, en attribuant les indices s et r aux composants
statoriques et rotoriques respectivement, les tensions peuvent sexprimer par les quations
suivantes [58] :
s s s s
dt
d
i R v + = Eq. II-9
r r r r
dt
d
i R v + = Eq. II-10
La tension rotorique v
r
est nulle car le rotor est en court-circuit.
Par la suite, les grandeurs dfinies prcdemment (tension, courant, flux) sont
exprimes par la transforme de Park dq, dans un rfrentiel align sur le champ tournant (le
flux rotorique
r
). Les transformations permettant le changement de rfrentiel sont donnes
dans lAnnexe D. La relation entre les composants du courant statorique align sur le champ
tournant est prsente dans la Figure II-12.
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
52
isq
jsq
is
is
isd
is
sd
s
js
m
r
s
Axe rel
stationnaire
Axe rel
tournant
Axe imaginaire
stationnaire
Axe imaginaire
tournant
Figure II-12: Projection du vecteur courant sur le rfrentiel fixe et tournant
Ainsi, les quations II-9 et II-10 scrivent sous la forme suivante :
sq s sd sd s sd
dt
d
i R u + = Eq. II-11
sd s sq sq s sq
dt
d
i R u + + = Eq. II-12
rq r rd rd r
dt
d
i R + = 0 Eq. II-13
rd r rq rq r
dt
d
i R + + = 0 Eq. II-14
o
r
est la pulsation au rotor et
s
est la pulsation au stator.
Le rotor de la machine asynchrone cage tant ferm sur lui mme (court-circuit), on
prend u
dr
et u
qr
gales zro. Les flux statoriques et rotoriques sont obtenus partir des
courants :
rd m sd s sd
i L i L + = Eq. II-15
rq m sq s sq
i L i L + = Eq. II-16
sd m rd r rd
i L i L + = Eq. II-17
sq m rq r rq
i L i L + = Eq. II-18
o L
s
, L
r
sont les inductances propres statoriques respectivement rotoriques et L
m
, linductance
mutuelle.
La pulsation rotorique et le couple lectromagntique sont exprims par :
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
53
m s r
p = Eq. II-19
( )
rq sd rd sq
r
m
em
i i
L
L
p T =
2
3
Eq. II-20
o
( )
rq sd rd sq m em
i i i i pL T =
2
3
Eq. II-21
o
m
est la vitesse de rotation du rotor et p reprsente le nombre de paires de ples.
Les quations prsentes permettent dtudier le comportement dynamique de la
machine.
II.3.1.4 Courbe thorique de fonctionnement et structure de commande
Lobjectif de la stratgie de commande est visualis sur les caractristiques statiques
prsentes dans la Figure II-13(a) et II-13(a) reprsentant la puissance et respectivement le
couple dvelopps par la turbine olienne par rapport la vitesse de rotation pour diffrentes
vitesses du vent. La courbe de puissance maximale est reprsente sur la Figure II-13(a), en
reliant les points de puissance maximale pour chaque caractristique statique. Le lieu des
couples correspondants est reprsent dans le plan Couple/Vitesse de rotation de la Figure II-
13(b). Ainsi, lobjectif de la commande est de suivre la courbe de puissance maximale entre la
vitesse de rotation minimale et la vitesse de rotation nominale. La vitesse minimale reprsente
la vitesse partir de laquelle lolienne commence produire de lnergie. A partir de cette
vitesse et en suivant la courbe de puissance maximale, lolienne tourne la vitesse de
rotation lie la vitesse spcifique optimale
opt
pour laquelle le coefficient de puissance C
p
est maximal.
Pour toutes les vitesses de vent suprieures la vitesse de vent nominale (15ms sur la
Figure II-13(a)) la puissance de lolienne doit tre maintenue constante (
t nom
)
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
54
(a) (b)
Figure II-13: Caractristiques statiques : (a) puissance olienne par rapport la vitesse
de rotation et la courbe de puissance maximale ; (b) couple olienne par rapport
la vitesse de rotation et la courbe correspondant la puissance maximale
Deux structures sont gnralement utilises pour raliser la commande des oliennes
vitesse variable : la Commande Directe de Vitesse (CDV) et la Commande Indirecte de
Vitesse (CIV). Celles-ci ont t analyses et compares en dtails pour les oliennes
connectes aux grands rseaux interconnects [59][54]. Mme si les deux structures de
commande conduisent des rsultats semblables, la CIV, par sa dynamique, adoucit les
variations de puissance et minimise les efforts dans la chane de puissance. Cest ce type de
commande que nous avons choisi pour la commande de lolienne tudie et sa stratgie sera
dtaille par la suite.
La variable daction de la Commande Indirecte de Vitesse est le couple
lectromagntique T
em
. Sa consigne est dduite partir de lexpression des quations
arodynamiques et mcaniques de la turbine olienne sur le point de fonctionnement li C
p
maximum. Ainsi, lorsque la turbine olienne fonctionne sur le point de fonctionnement
optimal, on a :
v
t
opt
V
R
= ,
max _ _ p opt opt t
C C = Eq. II-22
Le couple capt par la turbine est donc donn par :
2
_
2
max _ 3
5
2
1
t t opt t p
opt
t
k C
R
T = =
avec
max _ 3
5
_
2
1
p
opt
t opt
C
R
k
= Eq. II-23
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
55
En remplaant le couple capt par la turbine dans lquation II-5, en rgime permanent, on a :
t em t t opt
D NT k =
2
_
0 Eq. II-24
soit :
t t
t opt
em
N
D
N
k
T =
2 _
Eq. II-25
Cette dernire expression donne le couple lectromagntique de rfrence qui permet de
suivre la courbe de puissance maximale :
m eq m opt em
D k T =
2
Eq. II-26
o :
3
_
N
k
k
t opt
opt
= ,
t m
N = et
2
N
D
D
eq
=
II.3.1.5 Convertisseur triphas Modulation de Largeur dImpulsions (MLI)
Le convertisseur auquel est connecte la machine asynchrone (Figure II-14) est
modlis sous les hypothses suivantes :
Les interrupteurs sont idaux ;
Les commutations se ralisent instantanment ;
Les deux interrupteurs situs sur le mme bras sont en tat de conduction
complmentaire.
i
a
i
b
i
c
MA
v
a
v
b
v
c
S
ap
S
bp
S
cp
S
an S
bn
S
cn
0
Redresseur
Onduleur
v
cc
/2
v
cc
/2
0
N
v
A
v
B
v
C
+
-
-
+
I
E
i
+
-
v
=
Figure II-15 : Convertisseur MLI triphas
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
56
Louverture et la fermeture des interrupteurs sont ralises laide de la commande
classique MLI qui consiste comparer le signal sinusodal de commande un signal
triangulaire frquence leve [60].
Le signal MLI commande louverture et la fermeture des interrupteurs et introduit des
discontinuits dans le systme. Par consquent, le modle mathmatique qui permet de
reprsenter cette dynamique ncessite des quations diffrentielles qui doivent tre rsolues
par intervalles cause des discontinuits. Ainsi, en considrant le point mdian 0 de la source
continue V
cc
comme point de rfrence, les tensions v
k0
(k=a, b, c) prennent la valeur V
cc
/2
quand un interrupteur suprieur situ sur un bras est en conduction et respectivement - V
cc
/2
quand le interrupteur infrieur situ sur le mme bras est en conduction :
2
0
CC k
k
V S
v = Eq. II-27
o S
k
=1 reprsente ltat des interrupteurs.
Parce que les commutations ncessitent un temps de simulation important et que
leffet des harmoniques introduites par la modulation nest pas lobjet de cette tude, le
modle du convertisseur a t simplifi laide du thorme des valeurs moyennes
(Averaging Theory) [61]. Ainsi, en considrant la frquence du signal triangulaire (porteuse)
beaucoup plus leve que la frquence du signal modulant, la fonction de commutation S
k
peut tre approxime par sa valeur en moyenne temporelle d
k
(les rapports cycliques obtenus
partir de la stratgie de commande) [62]. Le circuit quivalent est prsent dans la Figure II-
15 :
i
a
i
b
i
c
Machine
asynchrone
V
CC
/2
V
CC
/2
V
AN
V
BN
V
CN
+
-
+
-
I
E
d
a
d
b
d
c
Convertisseur
N
v
a0
v
b0
v
c0
0
~
~
~
Figure II-15 : Modle quivalent du convertisseur connect au gnrateur asynchrone en valeurs
moyennes
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
57
En reliant les tensions de phase relatives la rfrence de la machine et celles relatives
au point milieu du bus CC, on a :
0 0 b a BN AN
v v v v = Eq. II-28
0 0 c a CN AN
v v v v = Eq. II-29
Les tensions de phase rapportes au point N, peuvent tre exprimes par la relation Eq.
II-30 en considrant le systme quilibr (v
AN
+ v
BN
+ v
CN
=0) :
c
b
a
cc
CN
BN
AN
d
d
d
V
v
v
v
2 1 1
1 2 1
1 1 2
6
Eq. II-30
Le courant dans la partie continue peut tre obtenu partir de la loi de conservation de
la puissance :
c c b b a a E CC
i v i v i v I V
0 0 0
+ + = Eq. II-31
Ainsi, en remplaant les tensions v
a0
, v
a0
et v
a0
par leurs expressions en valeurs
moyennes, I
E
sexprime :
[ ] [ ]
T
c b a c b a E
i i i d d d I =
2
1
Eq. II-32
II.3.1.6 Stratgie de commande
La stratgie de commande permettant de rcuprer un maximum dnergie est montre
dans la Figure II-16. Il sagit dune commande vectorielle flux rotorique orient
[63][64][56]. Les courants de la machine asynchrone cage dcureuil sont rguls dans un
rfrentiel tournant dq, o laxe d est confondu avec la direction de flux
r
(Figure II-12).
Dans ce mode de fonctionnement, le contrle du flux et du couple est dcoupl. La
composante i
sd
*
fixe le flux de la machine et la composante i
sq
*
contrle le couple.
Le flux
r
tant orient sur laxe d,
rq
=0 (
rd
ct.), la composante du courant rotorique i
rd
est
gale 0 (Eq. II-13). Dans ces conditions, partir de lEq. II-17 on obtient lexpression de i
sd
permettant de fixer le flux
rd
:
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
58
abc
dq
dq
abc
+
+
+
-
+
+
+
+
-
-
m
V
CC
t
Machine
asynchrone
-
B
C
i
sa
i
sb
i
sc
i
sa i
sb
p
dt
d
m
k
opt
D
eq
sd T
i K
1
sd r
i T
1
i
s i
s
i
sq
i
sd
m
rd
L
*
i
*
s
PI PI
s
v
*
s
v
*
s
v
*
sa
v
*
sb
v
*
sc
i
*
sq
T
*
em
rd
r
m
sq s s
s
L
L
i L B + = ,
rd
r
m
s sd s s
L
L
i L C + =
Figure II-16 : Stratgie de commande de la machine asynchrone cage dcureuil
* *
sd m rd
i L = Eq. II-33
La consigne du courant statorique i
sq
*
est calcule partir de lEq. II-21 :
*
*
*
sd T
em
sq
i k
T
i = Eq. II-34
o
r
m
T
L
pL
k
2
2
3
= .
Comme il a t montr prcdemment, la consigne du couple lectromagntique T
em
*
est gnre pour suivre la courbe de puissance maximale montre dans la Figure II-13(a):
m eq m opt em
D k T =
2 *
Eq. II-35
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
59
Les grandeurs rotoriques doivent tre estimes partir des grandeurs statoriques qui
sont les seules accessibles. Ainsi, partir des quations II-13 et II-17, on peut estimer le flux
rd
:
1 +
=
s T
i L
r
sd m
rd
Eq. II-36
o T
r
est la constante de temps rotorique et s est loprateur de Laplace.
La position
s
de laxe d par rapport au stator est obtenue par lintgration de la
pulsation statorique
s
qui peut tre exprime partir des expressions II-14, II-18, II-19 et II-
36:
rd r
sq m
m s
T
i L
p
+ = Eq. II-37
Londuleur auquel est connecte la machine lectrique tant un onduleur de tension et
la variable de contrle tant le courant statorique, on exprime la relation liant le courant et la
tension :
sq s s
rd
r
m sd
s sd s sd
i L
dt
d
L
L
dt
di
L i R v
+ + = Eq. II-38
sd s s rd s
r
m
sq
s sq s sq
i L
L
L
dt
di
L i R v + + + = Eq. II-39
o :
s r
m
L L
L
2
1 = est le facteur de dispersion.
Ces relations expriment les tensions au stator de la machine sur les axes d et q. On y
remarque le couplage entre laxe d et laxe q. Le dcouplage est possible en considrant les
termes de couplage comme des perturbations (Figure II-17).
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
60
A
PI
PI
i
sd
i
sq
+
+
+
+
-
+
+
-
+
-
+
-
i
*
sd
i
*
sq
i
sq
i
sd
Machine asynchrone
dans la base de Park
Bi
sq
Ci
sd
v
sd
v
sq
A
B
C
Figure II-17: Dcouplage des axes d et q dans la structure de commande de la machine
Le schma qui se trouve lintrieur du bloc machine asynchrone dans la base de
Park rsume les deux quations prcdentes qui ont t mises sous la forme :
( ) B v A i
sd sd
+ = Eq. II-40
( ) C v A i
sq sq
+ = Eq. II-41
o
s L R
A
s s
+
=
1
,
rd
r
m
sq s s
s
L
L
i L B + = ,
rd
r
m
s sd s s
L
L
i L C + =
Les paramtres des rgulateurs PI sont donns dans lAnnexe E.
II.3.2 Systme photovoltaque
Le but de cette section est de dcrire les modles mathmatiques des composants du
systme de conversion photovoltaque. Comme la chane de conversion olienne, le systme
de conversion photovoltaque est bas sur des blocs modulaires, comme prsent dans la
Figure II-18 :
Hacheur
survolteur
Systme de
commande
Ga
Ta
ipv
vpv
imcc
vcc
ipv vpv D
Gnrateur
PV
Figure II-18 : Systme de conversion photovoltaque
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
61
Ainsi, la modlisation du systme de conversion photovoltaque suppose la
modlisation du gnrateur photovoltaque (la cellule PV, les panneaux et leurs connections)
et de lensemble hacheur systme de commande, permettant dextraire la puissance maximale.
Lclairement utilis dans la simulation du systme PV est obtenu partir de mesures.
II.3.2.1 Cellule photovoltaque
La conversion photovoltaque consiste en la transformation directe de la lumire en
nergie lectrique (courant continu ; effet voltaque dcouvert en 1839 par Edmond
Becquerel), au moyen de dispositifs semi-conducteurs, communment appels cellules
photovoltaques [12]. Les cellules PV sont fabriques partir de matriaux semi-
conducteurs, d'habitude du silicium (Figure II-19). Il sagit dune structure en quatre couches :
une grille conductrice, une couche de silicium dope n, une couche dope p et une grille.
+
-
Charge
silicium type p
Eclairement nergtique
Grille
infrieure
Grille
suprieure
silicium type n
Figure II-19 : Cellule photovoltaque
Lorsquun photon ayant suffisamment dnergie est absorb par le semi-conducteur, il
produit la rupture dune liaison de valence et libre ainsi un lectron, ce qui cre un trou
positif [65]. Ces charges sont ensuite spares par le champ lectrique au niveau de la
jonction np, puis se dirigent vers les contacts lectriques correspondants. En reliant les deux
couches, travers un circuit lectrique, on obtient un mouvement des lectrons qui passent
dune couche lautre et crent ainsi un courant lectrique.
Dans l'obscurit, la cellule PV fonctionne comme une diode. Elle ne produit pas du
courant. Cependant, si elle est connecte une source externe de tension, il circulera un
courant I
D
[66].
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
62
Quand la cellule PV est claire, elle produit un courant approximativement proportionnel
lclairement. Une cellule est souvent modlise par le schma lectrique illustr dans la
Figure II-20 [66] [67] :
Iph
ID
Ic
Vc
Ta
Ga
Rs
Rsh
VD
Figure II-20 : Schma lectrique quivalent dune cellule photovoltaque, modle une diode
Dans la Figure II-20, la source de courant gnre un courant I
ph
, proportionnel
lclairement G
a
[W/m
2
]. Le fonctionnement de la diode est modlis par lquation de la
diode [28]. La rsistance shunt R
sh
caractrise le courant de fuite au niveau de la jonction et la
rsistance R
s
reprsente les diverses rsistances de contact et de connexion.
Le courant I
c
fourni par la cellule (Figure II-20) est la diffrence entre le courant I
ph
et
le courant direct de la diode I
D
:
( )
sh
c
c
s c c
ph D ph c
R
V
mKT
R I V e
I I I I I
+
= = 1 exp
0
Eq. II-42
o :
m - constante de qualit de la diode ;
K - constante de Boltzmann ;
T
c
- temprature absolue de la cellule ;
e - charge de llectron ;
V
c
- la tension aux bornes de la cellule ;
I
0
- le courant de saturation de la jonction non claire ;
1 exp
0
c
D
mKT
eV
I - le courant direct de la diode [65] [66] ;
=
c
g
T K
E
I exp 10 5 , 1
5
0
Eq. II-43
o, E
g
est dite lnergie de la bande interdite . Pour un matriau semi-conducteur donn, E
g
est presque constante et I
0
est donc une fonction de la temprature.
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
63
Le dernier terme de lquation II-42, V
c
/R
sh
, est beaucoup plus petit par rapport aux
deux premiers termes et il peut par consquent tre nglig.
La Figure II-21 montre la caractristique courant-tension (I
c
-V
c
) pour une cellule
photovoltaque. Ainsi, si une rsistance variable R est connecte aux bornes de la cellule PV,
le point de fonctionnement est dtermin par lintersection de la caractristique I
c
-V
c
de la
cellule avec la courbe de la charge. Pour une charge rsistive, la courbe de charge est une
droite avec la pente 1/R. Par consquent, si la rsistance R est petite, le point de
fonctionnement est situ dans la rgion AB de la courbe. Le courant I
c
varie peu en fonction
de la tension (il est presque gal au courant de court-circuit). La cellule se comporte comme
un gnrateur de courant. D'autre part, si la rsistance R est grande, la cellule fonctionne dans
la rgion CD. Dans cette zone, la tension de la cellule varie peu en fonction du courant I
c
: la
cellule se comporte comme une source de tension qui est presque gale la tension de
fonctionnement vide. Dans la rgion BC sur la courbe, la cellule PV ne peut tre caractrise
ni par une source de courant, ni par une source de tension. Cest dans cette zone que se trouve
le point pour lequel la puissance fournie est maximale dans des conditions fixes
dclairement et de temprature.
I
c
V
c
I
cc
V
0c
A
B
C
D
1/R
opt
1/R
V
max
I
max
M
Figure II-21 : Caractristique I
c
(V
c
) dune cellule photovoltaque
Une cellule relle peut tre caractrise par les paramtres principaux, prsents aussi
dans la Figure II-21 :
Le courant de court circuit, I
cc
= I
ph
, est proportionnel lclairement et reprsente
le courant maximal gnr par la cellule. Il est produit dans des conditions de court
circuit (V
c
=0).
La tension vide correspond la chute de tension sur la diode, quand elle est
traverse par le photocourant I
ph
(I
D
= I
ph
), I
c
=0. Cette tension peut tre exprime
mathmatiquement par:
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
64
=
0 0
ln ln
I
I
V
I
I
e
mKT
V
ph
t
ph
c
tv
Eq. II-44
o
e
mKT
V
c
t
= est la tension thermique et T
c
est la temprature absolue de la cellule.
Le Point de Puissance Maximale est le point de fonctionnement M(V
max
, I
max
) dans la
Figure II-21, pour lequel la puissance dissipe dans la charge rsistive est maximale.
Le rendement maximal est le rapport entre la puissance maximale et la puissance
incidente :
a in
AG
V I
P
P
max max max
= = Eq. II-45
o P
in
est la puissance incidente, G
a
est lclairement et A est la surface de la cellule.
Le facteur de forme est le rapport entre la puissance dlivre la charge et le
produit de I
cc
et V
tv
:
cc tv CC tv
I V
I V
I V
P
FF
max max max
= = Eq. II-46
Le facteur de forme pour une cellule de bonne qualit est suprieur 0,7. Il diminue avec
laugmentation de la temprature de la cellule.
Dans la Figure II-22, est prsente linfluence de lclairement nergtique G
a
et de la
temprature T
c
de la cellule sur la caractristique I
c
-V
c
de la cellule PV.
(a) (b)
Figure II-22 : Influence de lclairement (a) et de la temprature (b) sur les caractristiques de la
cellule photovoltaque
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
65
La Figure II-22(a) montre laugmentation logarithmique de la tension de
fonctionnement vide avec lclairement, pendant que le courant de court-circuit est une
fonction linaire de lclairement. L'influence de la temprature de la cellule sur les
caractristiques I
c
-V
c
est illustre dans la Figure II-22(b). L'effet prdominant avec
laugmentation de la temprature de la cellule est la diminution de la tension de
fonctionnement vide ; la cellule est ainsi moins efficace. Le courant de court-circuit
augmente lgrement avec la temprature de la cellule.
II.3.2.2 Panneau photovoltaque
Plusieurs cellules PV sont groupes pour constituer des modules ou des panneaux PV.
Ceux-ci contiennent N
p
branches en parallle, chacune avec N
s
cellules connectes en srie,
Figure II-23.
1
2
Ns
1 2 Np
V
p
+
-
Figure II-23 : Panneau photovoltaque constitu par N
p
branches en parallle chacune avec N
s
cellules en
srie
Le modle du panneau photovoltaque est obtenu en remplaant chaque cellule dans la
Figure II-23 par le schma quivalent prsent dans la Figure II-20 (en considrant le mme
clairement et la mme temprature pour toutes les cellules). Dans le modle mathmatique
du panneau PV, qui sera prsent par la suite, les paramtres du panneau ont t rfrencs
par la lettre P et les paramtres de la cellule PV ont t rfrencs par la lettre C. Ainsi, le
courant I
p
, gnr par le panneau PV, dans des conditions de fonctionnement arbitraires, peut
tre dcrit par:
+
=
c
t s
p p
S
p
tv
p
P
cc
P
V N
I R V V
I I exp 1 Eq. II-47
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
66
Dans cette expression le courant gnr dpend :
Du courant de court circuit du panneau : I
cc
p
=N
p
I
cc
c
De la tension de fonctionnement vide du panneau : V
tv
p
=N
s
V
0c
c
De la rsistance srie quivalente du panneau PV : R
s
p
=(N
s
/N
p
)R
s
c
, o
c
S
R est la
rsistance interne de chaque cellule et la rsistance de la connexion entre les
cellules.
La tension thermique du semi-conducteur dune cellule PV :
e
mKT
V
c
c
t
=
Sachant quen pratique, le rendement dun panneau PV est dtermin dans des
conditions environnementales connues, tous les paramtres numrs prcdemment doivent
tre dtermins partir des donnes fournies par les catalogues des constructeurs. Ces
paramtres sont donns dans des conditions standards ou nominales, (Tableau II-4).
Tableau II-4 : Conditions nominales et standard
CONDITIONS NOMINALES
CONDITIONS STANDARD
Eclairement G
a,ref
=800 W/m
2
Eclairement G
as
=1000 W/m
2
Temprature ambiante T
a,ref
=20C Temprature de la cellule T
s
c
=25C
Temprature de la cellule T
ref
C
Courant court-circuit du panneau I
cc,s
c
Tension vide du panneau V
tv,s
p
Vitesse du vent : 1m/s
Puissance maximale du panneau P
max,s
p
Le courant de court-circuit de la cellule I
cc
C
varie linairement avec lclairement :
a
c
cc
G C I
1
= Eq. II-48
o la constante C
1
sexprime :
0 ,
0 ,
1
a
c
cc
G
I
C = Eq. II-49
La temprature de fonctionnement de la cellule T
c
dpend de lclairement G
a
et de la
temprature ambiante T
a
, selon lquation empirique suivante [66] :
a a
c
G C T T
2
+ = Eq. II-50
o la constante C
2
sexprime par la relation suivante :
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
67
ref a
ref a
c
ref
G
T T
C
,
,
2
= Eq. II-51
La dpendance de la tension vide avec la temprature de la cellule, lclairement et
le courant de court-circuit est exprime laide de lexpression suivante :
( )
( )
( )
c
s cc
c
cc
c
s
s a
a
c
s c
s
c c
s tv
c
tv
I I R
G
G
e
T K
T T C V V
,
,
3 ,
log
273
+
+ + = Eq. II-52
A partir des paramtres standards de la cellule, il est possible de retrouver aussi une
expression pour la rsistance interne dune cellule [66][68] :
c
cc
c
s tv
s
c
s
I
V
r R
,
= Eq. II-53
avec :
v
s
FF
FF
r =1 Eq. II-54
o :
+
=
1
72 . 0 ln
0 ,
,
0 ,
,
0 ,
,
c
t
c
s tv
C
t
c
s tv
C
t
c
s tv
V
V
V
V
V
V
FF Eq. II-55
Pour dlivrer des courants et des tensions adapts aux applications courantes, plusieurs
panneaux PV sont connects en srie et/ou en parallle (Figure II-24).
1
2
Ms
1 2 Mp
V
p
+
-
Figure II-25 : Connexion de plusieurs panneaux
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
68
Le courant total gnr par la configuration montre dans la Figure II-24 est donn par
lexpression suivante :
=
=
p
M
i
i
I I
1
Eq. II-56
Si on considre les panneaux PV identiques et le mme clairement pour tous, alors le
courant total est dfini par :
P
p
I M I = Eq. II-57
II.3.2.3 Optimisation du rendement nergtique du systme PV
Comme il est montr dans la Figure II-25, il existe un seul point sur la caractristique
I-V d'un panneau photovoltaque pour lequel la puissance maximale est produite. Quand un
panneau est connect directement sur une batterie (couplage direct), en gnral le point de
fonctionnement nest pas le Point de Puissance Maximale (MPP maximum power point)
(Figure II-25).
La puissance dlivre par les panneaux PV dpend de lclairement, de la temprature
et de la tension aux bornes [67]. Ainsi, dans un systme couplage direct, le systme PV doit
tre surdimensionn pour assurer la puissance demande par la charge.
Pour optimiser le rendement nergtique du systme PV, une solution est lutilisation
dun MPPT (Maximum Power Point Tracker). Celui-ci permet de suivre le point de puissance
maximale en contrlant la tension ou le courant PV indpendamment de la charge [69].
Figure II-25 : Caractristique Courant/Tension/Puissance dun panneau PV
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
69
Cependant, l'emplacement du PPM sur les courbes PV n'est pas connu priori. Il doit tre
localis par une mthode de calcul ou par un algorithme de recherche. La situation est
complique par le fait quentre le PPM, lclairement et la temprature, il existe une
dpendance non-linaire, (Figure II-26) :
Figure II-26 : Caractristiques puissance-tension dun gnrateur PV
Plusieurs algorithmes ont t proposs pour la ralisation du MPPT [69] [70]. De bons
rsultats sont obtenus avec lalgorithme incrmentation de la conductance ( incremental
conductance ). Lavantage de cet algorithme est la vitesse de recherche du point de puissance
maximale quand les conditions atmosphriques changent rapidement [69]. Cest cet
algorithme qui a t choisi pour la commande du MPPT tudi dans le cadre de ce travail et sa
description sera prsente par la suite.
La puissance produite par le gnrateur PV peut tre exprime par :
pv pv pv
V I P = Eq. II-58
La conductance et lincrmentation de la conductance peuvent tre identifies en
drivant lEq. II-58 par rapport la tension V
pv
:
pv
pv
pv
pv
pv
pv
pv
dV
dI
V
I
dV
dP
V
+ =
1
Eq. II-59
Ainsi, on a not avec G la conductance et avec G lincrment de la conductance :
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
70
pv
pv
V
I
G = Eq. II-60
pv
pv
dV
dI
G = Eq. II-61
Comme il est montr dans la Figure II-27, lalgorithme cherche le point pour lequel la
conductance est gale la conductance incrmente.
P
V
0 =
pv
pv
dV
dP
0 >
pv
pv
dV
dP
0 <
pv
pv
dV
dP
( ) G G =
( ) G G <
( ) G G >
PPM
Figure II-27 : Recherche du PPM par la mthode de lincrmentation de la conductance
Lalgorithme, bas sur la surveillance de la tension et du courant, est illustr dans le
diagramme-bloc prsent dans la Figure II-28.
Mesure :
V
pv
(t), I
pv
(t)
V
pv
=0
I
pv
=I
pv
(t)-I
pv
(t-t)
V
pv
=V
pv
(t)-V
pv
(t-t)
I
pv
=0
d(t)=d(t-t)-d d(t)=d(t-t)-d
oui
non
non
V
pv
(t-t)= V
pv
(t)
I
pv
(t-t)=I
pv
(t)
Retour
I
pv
>0
non
oui
oui
non non
oui
oui
I
pv
/V
pv
=-I
pv
/V
pv
Ipv/Vpv>-Ipv/Vpv
d(t)=d(t-t)+d d(t)=d(t-t)+d
Figure II-28 : Bloc-diagramme de lalgorithme Incrmentation de la conductance
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
71
Les calculs sont faits avec le pas t, d(t) tant le rapport cyclique au pas actuel, d(t-t)
tant le rapport cyclique au pas antrieur et d (Annexe E) tant le rapport cyclique
incrment [69][71].
II.3.2.4 Hacheur survolteur
Ladaptation de la tension aux bornes du panneau PV partir de la stratgie de
commande prsente dans la section antrieure est illustre dans la Figure II-29. Le
convertisseur CC/CC est un hacheur survolteur. Comme pour le convertisseur du systme
olien, le model du hacheur a t simplifi en utilisant le thorme des valeurs moyennes [61]
(Figure II-30).
I
pv
Algorithme
MPPT
i
gpv
V
pv
V
bus
I
L
I
cpv
Gnrateur PV
Convertisseur
CC/CC
d
h
Figure II-29 : Schma dtaill du systme de conversion PV
dV
bus
=V
D
L
i
gpv
V
pv
V
bus
I
L
+ -
dI
L
=I
T
D
L
I
T
(t)
i
gpv
V
bus
(t)
I
L
(t)
V
pv
(t)
T
V
D
(t)
(a) (b)
Figure II-30 : (a) Hacheur survolteur commutation, (b) Hacheur survolteur valeurs moyennes
Ainsi, les quations modlisant le hacheur sont :
( ) [ ]
pv bus
L
V V d
L dt
dI
+ + = 1
1
Eq. II-62
( )
L pv
pv
pv
I I
C dt
dV
=
1
Eq. II-63
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
72
En appliquant la loi de conservation de puissance, le courant gnr par le gnrateur
PV dans le bus CC peut tre exprim par la relation :
( )
L gpv
I d I = 1 Eq. II-64
o d est le rapport cyclique.
II.3.3 Bus courant continu
Lolienne et les panneaux PV prsents dans les sections II.3 et II.4 sont connects
un bus courant continu. Pour un fonctionnement optimal, ceux-ci ont besoin dune tension
constante sur ce bus.
La rgulation de la tension continue V
cc
sur le bus CC est mise en uvre par un
hacheur rversible en courant, connect un banc de batteries. Ainsi, le bus CC est rgul
une valeur de tension constante en contrlant le flux dnergie entre les batteries et le bus.
Quand lnergie fournie par les sources dnergie renouvelable est insuffisante pour faire face
une augmentation soudaine de la charge, la tension du bus CC devient infrieure la
valeur de rfrence. Dans ce cas, lnergie manquante est obtenue partir des batteries.
Quand il existe un excs dnergie, il est utilis pour recharger les batteries. Larchitecture de
ce systme est prsente dans la Figure II-31. Les composants prsents sur la figure seront
dtaills par la suite.
HACHEUR
rversible
en courant
PI
+
V
*
bus
V
bus
-
Batteries
V
bus
C
bus
I
bat
V
bat
I
cb
I
bg
I
cbus
d
b
Figure II-31 : Architecture du bus CC avec batteries de stockage
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
73
II.3.3.1 Batterie
L'nergie lectrique est une nergie qui ne peut tre stocke qu'en faibles quantits.
Dans les systmes isols, des batteries sont souvent utilises pour garantir lquilibre
production/consommation et pour lisser les variations de puissance.
Avant de passer la description "modlisation de la batterie", il est utile de dfinir certaines
notions sur les batteries.
Concepts
Toute batterie est un ensemble de cellules lectrochimiques capables de stocker de
l'nergie lectrique sous forme chimique, puis de la restituer partiellement par la suite, grce
la rversibilit des ractions mises en jeu. Ces ractions consistent en des oxydations et des
rductions [72] au niveau des lectrodes, le courant circulant sous forme d'ions dans
l'lectrolyte et sous forme d'lectrons dans le circuit raccord la batterie (Figure II-32).
La capacit nergtique de la batterie (exprime en wattheures, Wh) dpend des quantits et
de la nature des lments chimiques compris dans la cellule.
Electrode
positive
Electrode
ngative
+
-
+
-
+
-
Circuit externe
Flux dlectrons
Electrolyte
Raction de
transfert de charge
(rduction)
Raction de
transfert de charge
(oxydation)
Courant ionique
+ -
Figure II-32 : Cellule lectrochimique de base
L'anode est l'lectrode laquelle l'oxydation (perte d'un ou plusieurs lectrons) se
produit et partir de laquelle les lectrons vont alimenter le circuit extrieur (la charge). La
cathode est l'lectrode laquelle se produit la rduction (gain d'un ou plusieurs lectrons); les
lectrons revenant de la charge arrivent sur cette lectrode. En dcharge, l'anode est la borne
ngative de la batterie et la cathode la borne positive. Par contre, en charge, l'lectrode
ngative est la cathode et l'lectrode positive est l'anode, les lectrons circulant alors dans
l'autre sens.
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
74
Les paramtres lectriques suivants sont gnralement employs pour caractriser une
batterie:
La capacit nominale q
max
est le nombre maximal d'ampres-heures (Ah) qui peut
tre extrait de la batterie, dans des conditions de dcharge prdtermines.
L'tat de charge SOC (State of charge) est le rapport entre la capacit prsente et la
capacit nominale q
max
: SOC = q/q
max
(0 SOC 1). Si SOC = 1, la batterie est
totalement charge si SOC = 0, la batterie est totalement dcharge.
Le rgime de charge (ou dcharge) est le paramtre qui reflte le rapport entre la
capacit nominale d'une batterie et le courant auquel celle-ci est charge (ou
dcharge). Il est exprim en heures. Par exemple, pour une batterie de 150 Ah
dcharge 5 A, le rgime de dcharge est 30 h.
La dure de vie est le nombre de cycles charge/dcharge que la batterie peut soutenir
avant de perdre 20% de sa capacit nominale.
Modlisation de la batterie
Il existe dans la littrature une large varit de modles de batterie [73][74][75]. Le
plus souvent, ces modles reprsentent la batterie par un circuit lectrique quivalent,
compos de rsistances, de capacits et autres lments de valeur fixe ou variant avec des
paramtres tels que l'tat de charge ou la temprature. Ces modles sont utiliss pour
dterminer l'tat de charge ou pour prdire la dure de vie des batteries. La plupart des
modles sont constitus de deux parties, lune dcrivant le model de capacit et lautre, le
model de tension de la batterie [66].
La capacit est une des caractristiques les plus importantes dune batterie. Cette
capacit reprsente la quantit de courant qui peut tre extraite d'une lectrode via les "masses
actives", c'est--dire l'lectrolyte et les matriaux actifs des lectrodes, sur une dcharge. Cette
capacit s'exprime en ampres-heures, Ah (1 Ah = 3600 coulombs). En pratique, cette
capacit dpend du courant, ainsi que de la temprature [66][73].
Le modle de la tension fournit l'amplitude de la tension aux bornes de la batterie.
Cette tension est influence par la profondeur de la charge et de la dcharge. Le modle de la
tension doit tre capable de prvoir que la tension de la batterie baisse lentement
(linairement) pendant la premire partie de dcharge et rapidement la fin, quand la batterie
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
75
est presque vide (Figure II-33). Dans le cas de la recharge, la tension augmente linairement
pendant la premire partie et plus rapidement vers la fin de la charge.
Vbat [V]
Temps [h]
M
N
Vbat [V]
Temps [h]
M
N
Charge Dcharge
Figure II-33 : Evolution de la tension avec le temps, durant la charge et la dcharge
Les modles de tension sont gnralement bass sur des quations qui relient la
tension au courant et l'tat de charge [66][73].
Les diffrents modles existant dans la littrature pour les batteries sont dune mise en
oeuvre difficile notamment cause du nombre lev de paramtres dterminer. Ces
paramtres sont ncessaires pour modliser lvolution dans le temps de la tension aux bornes
de la batterie, sur toute la phase de charge et de dcharge (Figure II-33). Par consquent, ces
types de modles sont adquats pour des simulations long terme. Sachant que dans la
prsente tude, le modle de la batterie servira modliser les courbes de charge et dcharge
dans la partie linaire (entre les points M-N sur les courbes prsentes dans la Figure II-33) et
que lanalyse en simulation sera effectue sur des intervalles de temps assez courts, il est plus
appropri dutiliser un modle simplifi. Le schma lectrique dun tel modle est prsent
dans la Figure II-34. Il sagit dune source idale de tension en srie, avec une rsistance et
une capacit.
R0
I
charge
V
bat
+
-
E
I
dcharge
R
Charge
C
b
V
cb
Figure II-34 : Modle lectrique simplifi
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
76
Par convention, la batterie est vue comme un gnrateur. Le courant de charge est
ngatif et celui de dcharge est positif. Pour ce modle, linfluence de la temprature est
nglige, le modle de la capacit est approch par le condensateur C
b
et le modle de tension
est obtenu en appliquant la loi des mailles :
Cb bat bat
V I R E V + =
0
Eq. II-65
La rsistance R
0
, suppose constante, modlise la rsistance interne de la batterie,
tandis que la source idale de tension E en srie avec la capacit C
b
modlise la partie linaire
sur les courbes de charge et de dcharge.
Les valeurs des lments constituant le modle sont alors dtermines par des essais
de charge et de dcharge dans le but dapprocher les courbes de fonctionnement de la batterie.
Plusieurs batteries sont assembles en srie lorsque l'on dsire disposer d'une tension plus
grande que celle d'une seule batterie, et en parallle, lorsque le courant requis dpasse la
capacit d'une seule batterie.
II.3.3.2 Hacheur rversible en courant
Dans le cas du hacheur utilis pour adapter la tension aux bornes du gnrateur PV, le
transfert dnergie seffectue dans un seul sens, de la source (gnrateur PV) vers le bus CC.
Dans le cas du Hacheur utilis par la charge/dcharge des batteries, le courant lectrique doit
tre rversible. Ainsi, pour raliser le transfert dnergie dans les deux sens, un hacheur
survolteur et un hacheur dvolteur ont t associs [75] comme lindique la Figure II-35.
L
b
T
2
V
bat
I
bat
D
2
T
1
PI
+
V
*
bus
V
bus
-
V
bus
C
bus
I
cb
I
cbus
d
b
Survolteur Dvolteur
Bus CC
1-d
b
+ - + -
i
+
-
v
Figure II-35 : Hacheur rversible en courant
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
77
Les quations diffrentielles dfinissant le fonctionnement des deux hacheurs runis
sur la structure prsente dans la Figure II-35 ont t rsolues en utilisant un modle en
valeurs moyennes [61]. Sachant que la commande des interrupteurs T
1
et T
2
est simultane
avec des rapports cycliques d
b
et 1-d
b
complmentaires, le fonctionnement du hacheur
rversible en courant est dcrit par :
( )
bat bus b
bat
V V d
L dt
di
=
1
Eq. II-66
En appliquant la loi de conservation de la puissance, le courant inject ou absorb du
bus CC sexprime :
bat b cb
i d i = Eq. II-67
Le rapport cyclique d
b
est obtenu partir dun rgulateur PI (Annexe E) ayant comme
entre lerreur de tension sur le bus CC.
II.3.4 Onduleur triphas
La connexion entre le bus CC et le bus CA est ralise laide dun onduleur
triphas bidirectionnel. Cette section prsente le modle de la partie puissance et la stratgie
de commande choisie pour londuleur.
II.3.4.1 Modlisation de la partie puissance de londuleur triphas
Le schma lectrique de londuleur dans lenvironnement systme hybride est donn
dans la Figure II-36. Il sagit dun onduleur triphas bidirectionnel bas sur un pont de
transistors IGBT.
Pour ce type de convertisseurs, les stratgies de commutation souvent utilises sont
PWM (Pulse Width Modulation en anglais ou MLI, Modulation de Largeur dImpulsions, en
franais) ou SVM (Space Vector Modulation en anglais o MVS, Modulation du Vecteur
dEspace en franais). La stratgie de commutation SVM a plusieurs avantages par rapport
la stratgie de commutation PWM classique, cause dune meilleure utilisation du bus CC,
moins dharmoniques sur les courants et les tensions et moins de pertes dues aux
commutations [76].
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
78
v
a
v
b
v
c
i
a
i
b
i
c
v
0
L
f
GD
N
Z
ch
Energie
Renouvelable
+
Batteries
i
+
-
v
i
CD i
BD
i
AD
v
A
v
B
v
C
I
re I
CC
S
as
S
bs
S
cs
S
ai S
bi
S
ci
V
CC
i
ND
i
Cch i
Bch
i
Ach
N
0
v
a
v
b
v
c
Figure II-36 : Schma lectrique de londuleur triphas
Parce que la stratgie de commutation ne fait pas lobjet de notre tude, la
modlisation du convertisseur est ralise avec les hypothses numres dans la section
II.3.1.5. En considrant la charge triphase quilibre et le point mdian 0 de la source
dalimentation comme point de rfrence, les tensions v
a0
, v
b0
ou v
c0
prennent la valeur V
d
/2
quand linterrupteur suprieur dun bras (ex. S
as
) est en conduction et respectivement -V
d
/2
quand linterrupteur infrieur du mme bras (S
ai
) est en conduction. Dans la Figure II-36, les
interrupteurs ont t dsigns par S et leur tat peut tre 1. En appliquant le thorme des
valeurs moyennes, les interrupteurs peuvent tre remplacs par les rapports cycliques [61]
obtenus la sortie de la commande de londuleur (Figure II-37).
V
CC
/2
V
CC
/2
+
-
+
-
I
CC
0
d
a
d
b
d
c
v
a
v
b
v
c
i
a
i
b
i
c
L
f
Z
v
A
v
B
v
C
DG
i
BD i
AD
i
Bl
i
Al i
Cl
N
~
~
~
Figure II-37 : Schma quivalent de londuleur triphas en valeurs moyennes
Ainsi, en supposant que la tension sur le bus CC est fixe, les tensions de phase
lentre du filtre rapportes au point de neutre sont :
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
79
c
b
a
cc
cN
bN
aN
d
d
d
v
v
v
v
2 1 1
1 2 1
1 1 2
6
Eq. II-68
o V
cc
est la tension provenant de la source courant continu et d
a
, d
b
, d
c
sont les rapports
cycliques. Les quations diffrentielles permettant de modliser les tensions et les courants
dans londuleur sont :
c
b
a
f
c
b
a
f
cN
bN
aN
CN
BN
AN
i
i
i
dt
d
L
i
i
i
R
v
v
v
v
v
v
Eq. II-69
0 = + +
c b a
i i i Eq. II-70
o v
AN
, v
BN
et v
CN
sont les tensions triphases la sortie du filtre et i
a
, i
b
et i
c
sont les courants
triphass la sortie dans londuleur. Le courant dans la partie continue peut tre obtenu
partir de la loi de conservation de la puissance :
c c b b a a CC CC
i v i v i v i V
0 0 0
+ + = Eq. II-71
Ainsi, en remplaant les tensions par leur expression
( i s j c b a k
V S
v
CC kj
k
, ; , , ;
2
0
= = = ), i
cc
sexprime :
[ ] [ ]
T
c b a c b a CC
i i i d d d i
2
1
= Eq. II-72
II.3.4.2 Stratgies de commande de londuleur
La solution la plus simple pour la commande de londuleur est la commande
hystrsis qui fournit une rponse dynamique rapide, une bonne prcision, une robustesse
leve et il ny a pas de compensation en CC. Cependant, le problme majeur de la
commande hystrsis est que sa frquence moyenne de commutation varie avec le courant
de charge, entranant un comportement irrgulier et alatoire des interrupteurs [76]. Ce
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
80
comportement a comme consquence une fatigue supplmentaire des interrupteurs et rend
difficile le dimensionnement du filtre.
Le principe de commande tant fix, plusieurs stratgies de commande sont
envisageables pour le contrle des grandeurs lectriques [60][76][78][79]. Parmi celles-ci, la
stratgie de commande base sur la rgulation du courant (tension) en coordonnes continues
dq est largement utilise. Les boucles fermes de rgulation utilises par ces commandes
assurent une rponse rapide en rgime transitoire et une performance leve en rgime
stationnaire [60].
Ce type de commande a t choisi pour le convertisseur bidirectionnel illustr dans la
Figure II-36. Le schma de la commande est prsent dans la Figure II-38 :
Charge
G
D
Energie
Renouvelable
L
f
v
CN
v
BN
v
AN
i
b
i
d
i
q
i
*
q
i
*
d
v
Sd
v
Sq
d
a
d
b
d
c +
-
v
d
+
-
+
+
+
+
+
-
-
L
f
L
f
i
c
i
b
i
a
i
CD
i
BD
i
AD
i
Cl
i
Bl
i
Al
dq
abc
abc
dq
abc
dq
v
S
v
S
va vb vc
/
da db dc
i
c
i
a
VCC
i
d
v
d
i
q
v
Sa
v
Sb
v
Sc
PI
PI
PI
PI
+
+
v
q
-
v
*
d
v
*
q
Hacheur
survolteur
PI
+
-
Vbat
db
Ib
Icb
Figure II-38 : Stratgie de commande du convertisseur bidirectionnel en coordonnes dq
Il sagit dune stratgie de commande permettant londuleur de contrler de manire
autonome en frquence et en amplitude la tension dlivre une charge. Cette stratgie
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
81
contient deux boucles de rgulation : une boucle interne pour la rgulation du courant et une
boucle externe pour la rgulation de la tension [78] [79]. Le contrle de ces grandeurs est
ralis dans un rfrentiel tournant dq (Figure II-39).
iq
jq
i
is
id
i
d
j
vd
Axe rel
stationnaire
Axe rel
tournant
Axe imaginaire
stationnaire
Axe imaginaire
tournant
vl
v
Figure II-39 : Projections des diffrentes composantes des vecteurs courant et tension dans un rfrentiel
tournant
La rgulation de la composante i
d
du courant permet dagir sur le flux de puissance
active, alors que la rgulation de la composante i
q
du courant agit sur le flux de puissance
ractive. En exprimant lquations II-69 dans un systme de rfrence tournant li la tension
aux bornes de la charge, on a :
q f
d
f d f Sd d
i L
dt
di
L i R v v + = Eq. II-73
d f
q
f q f Sq
i L
dt
di
L i R v = 0 Eq. II-74
Deux rgulateurs PI (Annexe E) sont utiliss pour contrler les courants i
d
et i
q
.
Cependant, pour le systme dcrit par les quations II-73, II-74, les performances des
rgulateurs ne sont pas satisfaisantes cause du couplage existant entre laxe d et laxe q [76].
Le dcouplage est possible en considrant les termes de couplage comme des termes de
perturbation (Figure II-40).
Les signaux de commande sont obtenus partir des Eq. II-73 et II-74 :
( )( )
q f d d d Sd
i L i i PI v v + =
*
Eq. II-75
( )( )
d f q q Sq
i L i i PI v + =
*
Eq. II-76
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
82
v
*
d
PI
PI
f f
sL R +
1
PI
f f
sL R +
1
L
f
L
f
v
d
i
d
i
q
+
-
v
ld
-
+
+
+
-
-
+
+
+
+
-
+
-
i
*
d
i
*
q
i
q
i
d
Modle du filtre dans
la base de Park
v
d
L
f
i
q
L
f
i
d
v
Sd
v
Sq v
*
q
=0
PI
v
q
+
-
Figure II-40 : Dcouplage des axes d et q
Les consignes i
d
*
et i
q
*
sont les sorties des PI utiliss dans la boucle externe de
rgulation des tensions v
ld
et v
lq
. Cette boucle de rgulation permet de fixer lamplitude de la
tension sur le bus CA (v
*
ld
=ct) et dannuler v
lq
.
( )( )
d d d
v v PI i =
* *
Eq. II-77
( )( )
q q q
v v PI i =
* *
Eq. II-78
Les signaux de commande v
Sd
et v
Sq
sont ramens dans la base de dpart
(transformations inverses de Clarke et Park) pour servir de signaux de commande (calculer les
rapports cycliques). Langle utilis dans les transformations de Park est obtenu en intgrant
la vitesse angulaire (=2f, f la frquence des grandeurs alternatives).
II.3.5 Gnrateur diesel
Comme indiqu dans la section 1.3.1.3., le gnrateur diesel est en gnral constitu
dun moteur diesel et dun gnrateur synchrone. Le modle dynamique complet du groupe
lectrogne diesel suppose la modlisation du moteur diesel avec la boucle de rglage de la
vitesse et du gnrateur synchrone avec le systme de rglage de la tension.
II.3.5.1 Moteur diesel et rgulateur de vitesse
Les moteurs diesels sont les moteurs combustion interne les plus efficaces [80]. La
vitesse de rotation d'un tel moteur dpend de la quantit de carburant inject et de la charge
applique au vilebrequin du moteur. Le moteur diesel est un systme non linaire. Il prsente
des temps morts et des retards, ce qui rend difficile son contrle. Les moteurs diesels sont
munis dun rgulateur de vitesse : mcanique, lectromcanique ou lectronique. Celui-ci
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
83
ralise le contrle automatique de la vitesse du moteur diesel, en rglant linjection de
carburant en fonction de la charge. Il agit sur le mcanisme d'acclration, en fournissant le
carburant sans variations abruptes et rpond en finesse aux variations de charge.
De nombreux ouvrages proposent des modles plus ou moins complexes du moteur
diesel, en fonction de la disponibilit des donnes constructeurs [18][6][81]. Cependant,
lexprience et les mesures en exploitation ont montr que pour tudier la rponse du systme
face aux perturbations rapides de vitesse, il peut suffire dutiliser un modle simple [6][82].
Le diagramme bloc dun moteur diesel simplifi et celui du rgulateur de vitesse
respectivement sont illustrs dans la Figure II-41.
d
1
s
K
I
2
1 s
K
a
+
s
e
1
Machine
synchrone
*
d
d
T
d
+
-
+
+
Actionneur Combustion
u
Figure II-41 : Bloc-diagramme dun moteur diesel simplifi et du rgulateur de vitesse
Lentre du rgulateur de vitesse est lerreur de vitesse de rotation et la sortie est le
signal de commande de lactionneur. Les paramtres du rgulateur de vitesse sont le statisme
d
et le facteur intgrateur K
I
. Lobjectif de lintgrateur est dliminer lerreur statique de la
vitesse. La dynamique de fonctionnement de lactionneur est approche par un modle du
premier ordre avec le gain K
a
, qui adapte la relation entre le couple et la consommation de
carburant et une constante de temps
2
. Cette constante de temps dpend de la temprature du
carburant. Les deux paramtres, K
a
et
2
, sont variables, mais leur variation est ngligeable
pour des intervalles de temps courts [80][83].
Le bloc combustion inclut un retard qui reprsente le temps ncessaire pour que le
moteur diesel rponde une demande de modification du taux dinjection de carburant. Ce
temps mort
1
est le rsultat de plusieurs cylindres qui ne sont pas tous dans la position
permettant daccepter plus de carburant un instant donn. Le dlai peut tre exprim comme
tant le temps rel entre les arrives conscutives des pistons au point dinjection plus
approximativement un quart de tour du vilebrequin. Ainsi, le dlai peut tre approch par :
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
84
d d c
n
h
=
4
60
2
60
1
Eq. II-79
o h=2 ou 4 pour des moteurs deux ou quatre-temps ; n
c
est le nombre de cylindres et
d
est
la vitesse de rotation en tours par minute.
Le couple produit par le moteur diesel, T
d
, est une fonction du dbit de carburant .
Dans le cas dun rseau isol ayant comme source principale le gnrateur diesel,
celui-ci est charg de fixer la frquence du rseau et de garder lamplitude de la tension
constante. Pour le SEH tudi dans cette thse, la frquence et lamplitude de la tension sont
fixes par londuleur, ce qui permet au GD de fonctionner puissance constante et dtre
arrt si ncessaire. Par consquent, le modle du moteur diesel se rduit une constante qui
fixe la puissance de la machine synchrone.
II.3.5.2 Modle simplifi de la machine synchrone
La puissance mcanique fournie en sortie du bloc moteur diesel est convertie en
puissance lectrique par un modle simplifi [84] de la machine synchrone. Les parties
mcanique et lectrique de la machine sont modlises dans le mme bloc.
Le rotor de la machine synchrone est constitu dun enroulement parcouru par un courant
dexcitation Ie continu crant un champ magntique 2p polaire. Il possde donc p paires de
ples. Le mme nombre de ples se retrouve dans le stator. Ses enroulements sont le sige de
courants alternatifs triphass. La liaison entre la pulsation
g
du champ magntique tournant
et la vitesse de rotation est :
p
g
s
= Eq. II-80
avec
g
=2f,o f est la frquence des courants alternatifs en Hz.
Un enroulement de linduit (stator) soumis au champ magntique tournant de
lentrefer est le sige dune force lectromotrice e(t) de valeur efficace E :
s s
n K pn KN f KN E = = =
'
Eq. II-81
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
85
o :
K : coefficient de Kapp (caractristique de la machine)
N : nombre de conducteurs dune phase de la machine (1 spire = 2 conducteurs)
: flux maximum travers un enroulement [Wb]
n
s
: vitesse de rotation [rpm]
K = KNp : constante globale (caractristique de la machine)
Le modle quivalent dun enroulement du gnrateur synchrone est montr dans la Figure II-
42 :
e
g
R
g
L
g
v
g
i
g
Figure II-42 : Modle quivalent dun enroulement
e
g
: f..m. vide [V]
V : tension aux bornes dun enroulement de la machine [V]
R
g
: rsistance de lenroulement []
L
g
: inductance synchrone []
La loi des mailles pour le schma prsent dans la Figure II-42 avec les grandeurs
instantanes est :
g g
g
g g g
i R
dt
di
L v e + + = Eq. II-82
En triphas, le stator comporte trois enroulements et donc trois forces lectromotrices
e
g1
(t), e
g2
(t) et e
g3
(t) de mme valeur efficace E et dphases de 2/3.
Dans le modle simplifi de la machine synchrone, la partie mcanique sans
frottement est dcrite par lquation :
g em d
s
ds
T T
dt
d
J
_
=
Eq. II-83
o :
J
ds
est linertie totale de lensemble moteur diesel gnrateur synchrone ;
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
86
s
est la vitesse de rotation ;
T
d
est le couple mcanique sur larbre ;
T
em_g
est le couple lectromagntique.
CHAP. II : Dimensionnement, modlisation et commande des composants du SEH
87
II.4 Conclusions
Dans ce chapitre, nous avons dimensionn et modlis un SEH constitu par une
olienne, des panneaux PV, un gnrateur diesel et un systme de stockage. Les sources
dnergie renouvelable sont connectes sur un bus CC. Linterconnexion entre le bus CC
et le bus CA sur lequel est connect le gnrateur diesel est ralise travers un
convertisseur CC/CA. Nous avons conu sous lenvironnement MATLAB/Simulink les
modles, de tous les lments du SEH, permettant une simulation du comportement du
systme complet. La simulation est utilisable pour une analyse dynamique du SEH allant de
quelques millisecondes jusqu plusieurs secondes.
Les modles prsents dans ce chapitre permettent dtudier le comportement du SEH
en rgime de charge quilibr. Dans le chapitre suivant, nous modlisons le SEH pour une
analyse en rgime de charge dsquilibre. Nous proposons aussi une solution qui permet
dquilibrer la tension aux bornes de la charge dans de conditions de dsquilibre.
CHAP. III : SEH EN CONDITIONS DE DESEQUILIBRE
CHAP. III : SEH en conditions de dsquilibre
91
CHAP. III : SEH EN CONDITIONS DE DESEQUILIBRE
III.1 Introduction
Parmi les problmes rencontrs dans la mise en uvre dun SEH, lorsque la
distribution est faite en triphas, le dsquilibre de tension tient une place importante. Le plus
souvent, ce dsquilibre est caus par des charges monophases qui ne sont pas distribues
uniformment sur les trois phases du systme triphas.
Pour modliser ltat de dsquilibre et aussi simplifier lanalyse en vue dune
solution, la dcomposition dune grandeur triphase quelconque en trois systmes de variables
triphases selon le thorme de Fortescue peut tre utilise. Cette approche dont le fondement
est mathmatique permet une interprtation physique pour les conditions du dsquilibre
et permet denvisager un principe de correction.
Pour contrler les squences inverse et homopolaire qui apparaissent en conditions de
charges dsquilibres, plusieurs solutions passives et actives sont disponibles. Il existe trois
solutions actives pour corriger la squence inverse : les filtre passifs [79], lasservissement
[85] ou la rgulation avec action prvisionnelle [86]. Il est possible dliminer la squence
inverse de la tension avec un convertisseur utilisant trois bras et une stratgie de commande
ou des combinaisons des stratgies de commande numres plus haut. Ce convertisseur qui
rgle les trois niveaux de tension nest cependant pas capable de traiter simultanment la
squence homopolaire. Nous proposons une dmarche originale pour atteindre lobjectif dun
rseau quilibr en tension, sous le contrle dun onduleur quatre bras. Le quatrime bras
contrle lvolution du potentiel du fil de neutre.
Ce chapitre prsente dabord la reprsentation dun systme de grandeurs triphases
dsquilibres en composantes symtriques, puis dans un rfrentiel tournant de coordonnes
dq0 li la pulsation des grandeurs. Ensuite, sont prsents la dfinition du dsquilibre, le
modle du convertisseur quatre bras et deux stratgies de commande capables de traiter les
perturbations entranes par les squences directe et inverse. La premire stratgie de
commande assure la rgulation de la tension et du courant mesurs la sortie du convertisseur
en coordonnes dq0. La deuxime dcompose les courants et les tensions de charge en
composantes symtriques, puis rgule les projections de chacune delles dans un rfrentiel
tournant li la pulsation respective.
CHAP. III : SEH en conditions de dsquilibre
92
III.2 Reprsentations des variables triphases dsquilibres
III.2.1 Composantes symtriques des systmes triphass
Selon le thorme de Fortescue [87], un systme triphas de vecteurs dsquilibrs
peut se dcomposer en trois systmes de trois vecteurs symtriques (Annexe F), selon les
modles suivants (Figure III-1) :
1. Un systme triphas quilibr, nomm systme de squence directe, form de trois
vecteurs gaux en amplitude, de squence normale ABC, tel que deux vecteurs
conscutifs soient dphass de 120;
2. Un systme triphas quilibr, nomm systme de squence inverse, form de trois
vecteurs gaux en amplitude, de squence inverse par rapport celle du systme
prcdent, cest--dire CBA, tel que deux vecteurs conscutifs soient dphass de
120;
3. Un systme form de trois vecteurs gaux en amplitude et ayant tous les trois la mme
orientation, nomm systme de squence homopolaire.
Il est important de noter que les trois systmes de vecteurs quilibrs sont indpendants les
uns des autres du point de vue de lamplitude et du dphasage par rapport une rfrence,
mais ils tournent tous les trois la mme vitesse et dans le mme sens : le sens antihoraire
(Figure III-1). Le terme squence inverse signifie que les vecteurs, aux yeux dun observateur
immobile qui les regarde tourner, apparaissent dans un ordre inverse par rapport celui du
systme direct. Les vecteurs homopolaires tournent dans le mme sens et la mme vitesse
que les vecteurs du systme originel.
120
120
120
120
120
120
X
C,d
X
A,d
X
B,d
X
A,i
X
B,i
X
C,i
X
A,h
X
B,h X
A,h
+
+
X
C
X
A
X
B
=
Figure III-1 : Systme de vecteurs dsquilibrs, dcompos en trois systmes triphass symtriques
diffrents et indpendants
Un systme triphas de grandeurs dsquilibres en reprsentation phasorielle peut
tre exprim par :
CHAP. III : SEH en conditions de dsquilibre
93
( )
+ +
+
)
3
2
(
3
2
C
B
A
t j
C
t j
B
t j
A
C
B
A
e X
e X
e X
x
x
x
Eq. III-1
o X
A
, X
B
et X
C
sont les amplitudes des trois phases.
Selon le thorme de Fortescue, en utilisant une reprsentation phasorielle et les matrices de
transformation prsentes dans lAnnexe F, le systme triphas (Eq. III-1) devient :
h C
h B
h A
i C
i B
i A
d C
d B
d A
C
B
A
x
x
x
x
x
x
x
x
x
x
x
x
,
,
,
,
,
,
,
,
,
Eq. III-2
o les membres droits de lquation III-2 sont les vecteurs de squence directe, de squence
inverse et de squence homopolaire exprims par les relations suivantes :
( )
+ +
+
)
3
2
(
3
2
,
,
,
d
d
d
t j
d
t j
d
t j
d
d C
d B
d A
e X
e X
e X
x
x
x
Eq. III-3
( )
+ +
+
+
)
3
2
(
3
2
,
,
,
i
i
i
t j
i
t j
i
t j
i
i C
i B
i A
e X
e X
e X
x
x
x
Eq. III-4
( )
( )
+
+
+
) (
,
,
,
h
h
h
t j
h
t j
h
t j
h
h C
h B
h A
e X
e X
e X
x
x
x
Eq. III-5
La partie relle dun systme de grandeurs triphases dsquilibres, dcompos
utilisant les composantes symtriques, est illustre dans la Figure III-2 :
CHAP. III : SEH en conditions de dsquilibre
94
Figure III-2 : Composantes symtriques dun systme de grandeurs triphases : (a) systme dsquilibr,
(b) systme de squence directe, (c) systme de squence inverse, (d) systme de squence homopolaire
III.2.2 Transformation des systmes triphass dsquilibrs dans le
rfrentiel tournant dq0
La somme des grandeurs dun systme triphas quilibr est nulle. En appliquant la
transforme de Park (Annexe D), le systme triphas devient biphas en coordonnes dq, la
composante 0 tant nulle. Un exemple de systme triphas quilibr transform en
coordonnes dq0 est illustr dans la Figure III-3 (jusqu linstant t=0,04 s). Le nouveau
systme de rfrence est choisi tel que, linstant t = 0, laxe d concide avec laxe du
rfrentiel 0 (Annexe D). Dans le cas dun systme triphas dsquilibr, la somme des
CHAP. III : SEH en conditions de dsquilibre
95
grandeurs nest plus nulle et la transformation du systme triphas en coordonnes de Park
donne trois composantes dq0 non nulles (Figure III-3, aprs linstant t=0,04 s).
Comme illustr dans la Figure III-3, un systme triphas dsquilibr prsente, dans le
rfrentiel tournant dq0, des oscillations la pulsation 2 (=2f, o f est la frquence des
grandeurs alternatives, f=50 Hz), sur les composantes d et q (Figure III-3(b)(c)), et , sur la
composante 0 (Figure III-3(d)).
Figure III-3 : Systme triphas quilibr/dsquilibr et sa transformation dans le rfrentiel tournant
dq0 : (a) systme fondamental, (b) composante-d, (c) composante-q, (d) composante-0.
Nous nous proposons de trouver la source des oscillations superposes sur les
composantes dq0. Dans ce but, les composantes symtriques du systme triphas dsquilibr,
illustres dans la Figure III-3(a) sur lintervalle 0,04-0,08 s, ont t transformes en
coordonnes dq0. Le rfrentiel utilis tourne dans le mme sens (antihoraire) pour toutes les
squences. Mathmatiquement, en appliquant la transform de Park la partie relle du
systme (Eq. III-2), on a :
CHAP. III : SEH en conditions de dsquilibre
96
h
h q
h d
i
i q
i d
d
d q
d d
q
d
X
X
X
X
X
X
X
X
X
X
X
X
, 0
,
,
, 0
,
,
, 0
,
,
0
Eq. III-6
Comme illustr dans la Figure III-4, la seule squence qui oscille la pulsation 2 en
coordonnes dq0 est la squence inverse (Figure III-4(c)). Ces oscillations apparaissent parce
que le systme de rfrence dq0 choisi tourne dans le sens antihoraire, la vitesse , alors
que la perturbation introduite par la squence inverse tourne la vitesse , dans le sens
contraire. La grandeur de squence homopolaire dans le rfrentiel tournant dq0 prsente des
oscillations de la composante 0, la pulsation (Figure III-4(d)).
Figure III-4 : Systme triphas dsquilibr et ses composantes symtriques dans le rfrentiel tournant
dq0 : (a) systme triphas dsquilibr, (b) systme de squence directe, (c) systme de squence inverse,
(d) systme de squence homopolaire
Par consquent, dans un systme dsquilibr en coordonnes dq0, lexistence de la
squence inverse entrane les oscillations la pulsation 2 sur les composantes d et q et la
CHAP. III : SEH en conditions de dsquilibre
97
prsence de la squence homopolaire entrane loscillation la pulsation sur la composante
0.
III.3 SEH avec charge dsquilibre
Les conditions de dsquilibre dans un SEH peuvent apparatre pour plusieurs raisons.
La plupart de charges domestiques sont monophases. Quand un SEH triphas alimente des
charges triphases et monophases, la puissance demande par chaque charge peut crer des
dsquilibres dans le systme. Pour les grands systmes de distribution, la prsence de
charges dsquilibres ne conduit pas une tension fortement dsquilibre. Cependant, les
SEH isols, avec impdances non nulles pour les lignes de transmission, sont soumis des
distorsions de tension en rapport avec le niveau de puissance, les dissymtries et la qualit des
charges.
III.3.1 Dfinition du dsquilibre de tensions
Le dsquilibre dun systme triphas sobserve lorsque les trois tensions ne sont pas
gales en amplitude et/ou dphases de 120 les unes par rapport aux autres. La quantification
du phnomne fait appel la dcomposition de la composante fondamentale selon les
composantes symtriques de Fortescue. La norme EN50160 [36] dfinit un degr de
dsquilibre inverse et un degr de dsquilibre homopolaire :
le degr de dsquilibre inverse est le rapport entre la composante inverse du
fondamental de la tension et sa composante directe :
[ ] 100 % _
directe squence
inverse squence
i Ds = Eq. II-7
le degr de dsquilibre homopolaire est le rapport entre la composante homopolaire
du fondamental de la tension et sa composante directe :
[ ] 100
hom
% _
directe squence
opolaire squence
h Ds = Eq. II-8
La norme EN50160 fixe le taux de dsquilibre inverse admissible 2 % sur les
valeurs efficaces calcules sur 10 minutes pour 95 % du temps dune semaine.
CHAP. III : SEH en conditions de dsquilibre
98
Le dsquilibre du systme triphas de tension est essentiellement d aux charges
monophases ou triphases dsquilibres raccordes sur le rseau. Les consquences sont
laugmentation de lchauffement des machines asynchrones et lexistence de couple inverse
et conduisent la dgradation prmature des machines.
III.3.2 Topologies de SEH en conditions de dsquilibre
Pour un SEH ayant pour but dalimenter des charges triphases et monophases, un
quatrime fil connect un point de neutre doit tre fourni. Si la charge totale est quilibre,
le fil de neutre ne sera pas sollicit en courant. Cependant, si la charge est dsquilibre un
point de neutre flottant entranerait une tension triphase dsquilibre.
Un moyen simple de gnrer le point de neutre est dutiliser deux condensateurs pour
diviser en deux le bus CC et connecter le fil de neutre au point milieu entre les deux
condensateurs (Figure III-5).
va
vb
vc
ia
ib
ic
v0
iN
Lf
GD
vN
Zch
Energie
Renouvelable
+
Batteries
iCD iBD
iAD
vA
vB
vC
Ire ICC
Sas
Sbs Scs
Sai Sbi
Sci
VCC
iND
iCch iBch iAch
Figure III-5 : Convertisseur bus CC divis par deux condensateurs pour la connexion du fil de neutre
En conditions de charge dsquilibre, le courant de neutre est partag entre les deux
condensateurs (Figure III-5) entranant une oscillation de la tension aux bornes des
condensateurs [88]. Cette variation est cause non seulement par les oscillations la pulsation
introduites par la squence homopolaire, mais aussi par les oscillations la frquence 2
introduites par la squence inverse. Lamplitude des oscillations de la tension aux bornes des
condensateurs dpend surtout du courant de neutre et de la valeur des capacits des
condensateurs. Pour minimiser ces oscillations, il est ncessaire dutiliser une trs grande
capacit pour les condensateurs [89].
CHAP. III : SEH en conditions de dsquilibre
99
Une autre possibilit qui peut rsoudre en partie les inconvnients de la structure
antrieure est illustre dans la Figure III-6. Dans cette topologie, chaque condensateur est
connect sur un hacheur [89].
Avec cette topologie, les effets ngatifs introduits par le courant de neutre peuvent tre
compenss par une commande individuelle de chaque hacheur.
v
a
v
b
v
c
i
a
i
b
i
c
i
N
L
N
L
f
GD
v
N
Z
Energie
Renouvelable
Batteries
i
CD
i
BD
i
AD
v
A
v
B
v
C
I
cc
S
as
S
bs
S
cs
S
ai
S
bi
S
ci
L
h2
S
1
S
2
i
ND
i
Cch
i
Bch
i
Ach
L
h1
S
3
S
4
v
0
Figure III-6 : Convertisseur triphas deux hacheurs
Le grand dsavantage du circuit prsent dans la Figure III-6 est que les deux bancs de
batteries peuvent se dcharger avec des courants asymtriques. Cette dcharge asymtrique
des batteries peut tre vite en utilisant un systme complexe de mesure et de commande.
En consquence, la prsence dune charge dsquilibre dans un SEH isol demande
une autre approche pour londuleur charg de fixer lamplitude et la phase de la tension,
diffrente de celle prsente dans la section II.3.4.
III.4 Convertisseur quatre bras
Une autre possibilit pour la connexion du fil de neutre est prsente dans la Figure
III-7. Il sagit dun convertisseur quatre bras [89][92], o le fil de neutre est connect au
milieu du quatrime bras. La connexion du point de neutre au milieu du quatrime bras
permet de traiter le courant de neutre caus par les charges dsquilibres. Une bonne
CHAP. III : SEH en conditions de dsquilibre
100
rgulation du courant de neutre permettra davoir des tensions bien quilibres, la sortie du
filtre du convertisseur.
Ce type de convertisseur que nous proposons sera tudi par la suite pour quilibrer la tension
triphase en sortie.
v
a
v
b
v
c
i
a
i
b
i
c
v
f
i
N
L
N
L
f
GD
v
N
Z
Energie
Renouvelable
Batteries
i
+
-
v
i
CD
i
BD
i
AD
v
A
v
B
v
C
I
rw
I
cc
I
cb
I
c
S
fs
S
as
S
bs
S
cs
S
fi
S
ai
S
bi
S
ci
V
cc
L
b
S
b1
S
b2
i
ND
i
Cch
i
Bch
i
Ach
Convertisseur
CC/CC
s
i
Figure III-7 : Convertisseur utilisant quatre bras
Pour les convertisseurs classiques utilisant une stratgie de commutation SVM, o la
charge est considre comme tant toujours quilibre, le vecteur spatial est en deux
dimensions et la stratgie de commutation est par consquent ralise en deux dimensions.
Dans ce cas, il existe huit combinaisons de commutations possibles pour le vecteur spatial.
Pour le convertisseur utilisant quatre bras, le nombre total de combinaisons de commutations
slve seize. Une version volue de la stratgie de commutation SVM en deux
dimensions, la SVM en trois dimensions, capable de fournir les squences de commutation
pour les huit commutateurs est prsente en [88][90].
Parce que la stratgie de commutation ne fait pas lobjet de cette thse, dans un
premier temps, le fonctionnement du convertisseur quatre bras est dfini par une fonction de
commutations (Eq. III-7), qui servira ensuite modliser le convertisseur en valeurs
moyennes.
CHAP. III : SEH en conditions de dsquilibre
101
=
ferm sont S et S Si
ferm sont S et S ou S et S Si
ferm sont S et S Si
S
fs ji
fi ji fs js
fi js
jf
, 1
, 0
, 1
j={a,b,c} Eq. III-9
Ainsi, les tensions la sortie du convertisseur sont :
cf
bf
af
CC
cf
bf
af
S
S
S
V
v
v
v
Eq. III-10
Le courant dans la partie continue peut tre exprim par :
[ ][ ]
T
c b a cf bf af cc
i i i S S S I = Eq. III-11
Les tensions de phase rapportes au point de neutre, v
af
, v
bf
et v
cf
, sont des tensions
obtenues avec une priode de commutation constante T
s
. Les tensions moyennes sur chaque
priode de commutation peuvent tre obtenues en utilisant le thorme des valeurs moyennes
[61].
III.4.1 Modlisation de la partie puissance du convertisseur
En ngligeant les pertes et en supposant que la frquence de commutation est de 10
20 fois plus grande que la frquence fondamentale, le convertisseur peut tre modlis en
valeurs moyennes, comme illustr dans la Figure III-8 :
En supposant que la tension sur le bus CC, V
cc
, est maintenue sa valeur de
rfrence grce au systme de rgulation utilisant lnergie des batteries (condition ncessaire
pour assurer lamplitude de la tension la sortie du convertisseur), les tensions v
af
, v
bf
, v
cf
peuvent tre exprimes par :
cf
bf
af
cc
cf
bf
af
d
d
d
V
v
v
v
Eq. III-12
CHAP. III : SEH en conditions de dsquilibre
102
V
cc +
-
d
af
V
cc
d
cf
V
cc
v
a
v
b
v
c
i
a
i
b
i
c
v
f
i
N
L
N
L
f
v
N
Z
v
A
v
B
v
C
I
cc
GD
i
CD
i
BD
i
AD
i
ND
i
Cch i
Bch
i
Ach
d
bf
V
cc
I
cc
~ ~ ~
Figure III-8 : Modle en valeurs moyennes du convertisseur
o d
af
, d
bf
et d
cf
sont les rapports cycliques. Les tensions et les courants dans le convertisseur
sont exprims par les quations III-13 et III-14.
N
N
N
N
N
N
N
N
c
b
a
f
c
b
a
f
CN
BN
AN
cf
bf
af
i
i
i
dt
d
L
i
i
i
R
i
i
i
dt
d
L
i
i
i
R
v
v
v
v
v
v
Eq. III-13
0 = + + +
N c b a
i i i i Eq. III-14
o v
AN
, v
BN
et v
CN
sont les tensions rapportes au point de neutre la sortie du filtre, i
a
, i
b
et i
c
sont les courants triphass la sortie de londuleur et i
N
est le courant de neutre. Le courant
dans la partie continue peut tre obtenu partir de la loi de conservation de la puissance (voir
section II.3.4.1) :
[ ][ ]
T
c b a cf bf af cc
i i i d d d i = Eq. III-15
Le modle en valeurs moyennes illustr dans la Figure III-8 est utilis pour dvelopper
les stratgies de commande prsentes par la suite.
III.5 Stratgies de commande du convertisseur quatre bras
Dans un SEH triphas, les courants dsquilibrs gnrs par des charges ingalement
distribues sur les trois phases peuvent entraner un courant de neutre et un dsquilibre de la
tension triphase (voir section III.3).
CHAP. III : SEH en conditions de dsquilibre
103
Dans cette section, sont prsentes deux stratgies de commande visant lquilibrage de la
tension au point de couplage entre londuleur, le gnrateur diesel et la charge. Les deux
stratgies de commande sont dveloppes sur la mme structure que celle prsente dans la
section II.3.4.2, cest--dire avec deux boucles de rgulation.
La premire stratgie de commande assure la rgulation du courant et de la tension en utilisant
un rfrentiel tournant dq0 (commande-dq0). La seconde stratgie dcompose les courants et
les tensions en composantes symtriques, puis ces dernires sont rgules dans un rfrentiel
tournant dq (commande-dih).
III.5.1 Stratgie de commande-dq0
La stratgie de commande dans le rfrentiel dq0 est illustre dans la Figure III-9. Il
sagit dune stratgie de commande deux boucles de rgulation, une boucle interne pour la
rgulation du courant et une boucle externe pour la rgulation de la tension. Les boucles de
rgulation du courant et de la tension incluent trois paires de rgulateurs de type
Proportionnel-Intgral (PI), une pour chaque canal, d, q et 0 (Annexe E).
Charge
G
D
Energie
Renouvelable
L
f
v
CN
v
BN
v
AN
i
b
i
d
i
q
i
*
q
i
*
d
v
fd
d
af
d
bf
d
cf
+
-
v
d
+
-
+
+
+
+
-
-
L
f
L
f
i
c
i
b
i
a
i
CD
i
BD
i
AD
i
Cch
i
Bch i
Ach
dq0
0
0
abc
0
abc
dq0
0
abc
dq
v
f
v
f
va vb vc
/
da db dc
i
c
i
a
i
d
v
d
i
*
0
v
*
af
PI
PI
PI
PI
+
+
v
q
-
v
*
d
v
*
q
Commande du
bus CC
PI PI
v
*
0
v
f0
i
N
i
0
v
0
-
+
i
AD
-
+
v
fq
v
f0
v
*
bf
v
*
cf
v
q
v
0
+
+
VCC
Hacheur
survolteur
PI
+
-
Vbat
db
Ib
Icb
V
*
CC
Figure III-9 : Stratgies de commande-dq0
CHAP. III : SEH en conditions de dsquilibre
104
La relation entre les diffrents rfrentiels utiliss dans la stratgie de commande est
illustre dans la Figure III-10 :
0
d
q
Figure III-10 : Relation entre les rfrentiels 0 et dq0
La stratgie de commande en coordonnes dq0 peut tre obtenue partir de lquation.
III-13 en appliquant la transform de Park (matrice T
p
Annexe D) aux systmes triphass :
La tension la sortie de londuleur en coordonnes dq0
0 f
fq
fd
cf
bf
af
P
v
v
v
v
v
v
T Eq. III-16
La tension la sortie du filtre en coordonnes dq0
0
v
v
v
v
v
v
T
q
d
CN
BN
AN
P
Eq. III-17
Le courant dans londuleur en coordonnes dq0
0
i
i
i
i
i
i
T
q
d
c
b
a
P
Eq. III-18
Les courants de neutre en coordonnes dq0 (en appliquant la transform de Park un
systme triphas de signaux identiques, les composantes dq sont nulles)
CHAP. III : SEH en conditions de dsquilibre
105
0
3
0
0
i I
I
I
T
N
N
N
P
Eq. III-19
La transforme de Park applique la drive dun systme triphas peut tre
exprime par :
dt
dX
X
dt
dT
T
dt
dX
T
dq
dq
P
P
abc
P
0
0
1
+ =
Eq. III-20
avec
0 0 0
0 0
0 0
1
dt
dT
T
P
P
Eq. III-21
En remplaant les quations III-16 - III-19 dans lquation III-13 et en tenant compte
des quations III-20 et III-21, nous obtenons :
0 0 0 0 0 0
3
0
0
3
0
0
0 i
dt
d
L
i
R i
i
L
i
i
i
dt
d
L
i
i
i
R
v
v
v
v
v
v
N N d
q
f q
d
f q
d
f q
d
f
fq
fd
Eq. III-22
Ainsi, les signaux de commande sont :
q f
d
f d f d fd
i L
dt
di
L i R v v + + = Eq. III-23
d f
q
f q f q fq
i L
dt
di
L i R v v + + + = Eq. III-24
dt
di
L i R
dt
di
L i R v v
N N f f f
0
0
0
0 0 0
3 3 + + + + = Eq. III-25
Le couplage existant entre les axes dq peut tre limin en insrant les termes -L
f
i
q
et
L
f
i
d
(Figure III-11).
CHAP. III : SEH en conditions de dsquilibre
106
v
*
d
=|v
d
|
PI PI
f f
sL R +
1
PI
f f
sL R +
1
L
f
L
f
v
d
i
d
i
q
+
-
v
d
-
+
+
+
-
-
+
+
+
+
-
+
-
i
*
d
i
*
q
i
q
i
d
Modle du filtre dans
la base de Park
v
d
L
f
i
q
L
f
i
d
v
fd
v
fq v
*
q
=0
PI
v
q
+
-
-
i
*
0
i
0
v
*
0
=0
PI
v
0
+
-
i
0
) 3 ( ) 3 (
1
N f N f
L L s R R + + +
v
q
v
0
PI
+
+
v
f0 +
+
-
v
0
v
q
-
Figure III-11 : Dcouplage des axes d et q
Boucle externe de rgulation de la tension :
Les consignes de la boucle interne de rgulation, i
*
d
, i
*
q
et i
*
0
, sont fournies par la
boucle externe de rgulation de la tension.
( )( )
d d d
v v PI i =
* *
Eq. III-26
( )( )
q q q
v v PI i =
* *
Eq. III-27
( )( )
0
*
0
*
v v PI i
q
= Eq. III-28
Lamplitude de la tension la sortie du filtre est impose par la rfrence v
*
d
. Les
consignes v
*
q
et v
*
0
sont fixes zro.
Boucle interne de rgulation du courant :
Les signaux v
fd
, v
fq
et v
f0
peuvent tre obtenus partir des quations III-23 - III-25:
( )( )
q f d d d fd
i L i i PI v v + =
*
Eq. III-29
( )( )
d f d d q fq
i L i i PI v v + + =
*
Eq. III-30
( )( )
d d f
i i PI v v + =
*
0 0
Eq. III-31
Les signaux de commande v
*
af
, v
*
bf
et v
*
cf
sont obtenus en appliquant la transforme de
Park inverse (Annexe D). Les rapports cycliques sont lis ces signaux par la relation III-32.
CHAP. III : SEH en conditions de dsquilibre
107
*
*
*
1
cf
bf
af
CC
cf
bf
af
v
v
v
v
d
d
d
Eq. III-32
III.5.2 Stratgies de commande-dih
Comme montr dans la section III.2.2, la tension ou le courant triphas dsquilibr
transform en coordonnes dq prsente des oscillations la pulsation 2. La composante 0 est
similairement affecte par les dsquilibres, mais la pulsation . Cette section prsente une
stratgie de commande en boucle ferme, base sur les composantes symtriques. Cette
stratgie de commande permet la rgulation du courant et de la tension en coordonnes dq
continues (sans oscillations), mme quand la charge est dsquilibre.
Dans un premier temps, le courant et la tension triphass sont dcomposs en
composantes symtriques (directe, inverse et homopolaire), en utilisant la reprsentation
phasorielle. Puis, les trois systmes triphass de tensions et courants instantans sont contrls
sparment en utilisant des rgulateurs PI dans diffrents rfrentiels tournants. Ainsi, la
squence directe est rgule dans un rfrentiel positif, cest--dire qui tourne dans le sens
antihoraire et les squences inverse et homopolaire sont rgules dans un rfrentiel ngatif,
cest--dire qui tourne dans le sens horaire.
III.5.2.1 Dcomposition de la tension triphase en composantes symtriques
Soit la tension triphase (quilibre ou dsquilibre) mesure la sortie du filtre (Eq.
III-33).
( )
+ +
+
+
=
)
3
2
cos(
)
3
2
cos(
cos
C CN
B BN
A AN
CN
BN
AN
t V
t V
t V
v
v
v
Eq. III-33
o V
AN
, V
BN
et V
CN
sont les amplitudes des trois phases.
Pour pouvoir dcomposer lquation III-33 en ses composantes symtriques, il faut dabord
trouver son expression phasorielle (Eq. III-34).
CHAP. III : SEH en conditions de dsquilibre
108
( ) ( )
+ + + + +
+ + +
+ + +
=
)
3
2
sin( )
3
2
cos(
)
3
2
sin( )
3
2
cos(
sin cos
C CN C CN
B BN B BN
A AN A AN
CN
BN
AN
t V j t V
t V j t V
t V j t V
v
v
v
Eq. III-34
Un moyen simple dobtenir la partie imaginaire de lexpression phasorielle de la
tension dcrite par lquation III-33 est de retarder la tension relle mesure, dun quart de
priode (T/4=1/(4f), f=50 Hz), comme illustr dans la Figure III-12. La somme du signal rel
mesur et du signal retard multipli par j ( 1 = j ) permet de retrouver lexpression
phasorielle du systme
abc
v . Ce dernier multipli par les matrices de transformation [F
d
], [F
i
]
et [F
h
] (Annexe F) donne les trois systmes de tension de squence directe, inverse et
homopolaire (Eq. III-35 III-37).
[ ] [ ][ ]
abc d d abc
v F v =
,
Eq. III-35
[ ] [ ][ ]
abc i i abc
v F v =
,
Eq. III-36
[ ] [ ][ ]
abc h h abc
v F v =
,
Eq. III-37
4
T
Delay
j
+
v
abc
p abc
v
,
n abc
v
,
h abc
v
,
abc
v
+
[ ]
[ ]
[ ]
h
i
d
F
F
F
Figure III-12 : Mthode de dcomposition de la tension en composantes symtriques
Les parties relles des systmes directe, inverse et homopolaire obtenues aprs la
dcomposition sont exprimes par les relations III-38, III-39 et III-40 :
( )
+ +
+
+
=
)
3
2
cos(
)
3
2
cos(
cos
,
,
,
d
d
d
d
d CN
d BN
d AN
t
t
t
V
v
v
v
Eq. III-38
CHAP. III : SEH en conditions de dsquilibre
109
( )
+
+ +
+
=
)
3
2
cos(
)
3
2
cos(
cos
,
,
,
i
i
i
i
i CN
i BN
i AN
t
t
t
V
v
v
v
Eq. III-39
( )
+
+
+
=
) cos(
) cos(
cos
,
,
,
h
h
h
h
h CN
h BN
h AN
t
t
t
V
v
v
v
Eq. III-40
o V
d
, V
q
et V
0
sont les amplitudes des systmes de squence directe, de squence inverse et
squence homopolaire respectivement.
La mthode de dcomposition prsente dans la Figure III-12 a t teste
dynamiquement sur une source idale de tension, pour laquelle lamplitude de la phase A,
linstant t=0,04 passe de la valeur nominale de 2 230 V 100 V et le rsultat est illustr
dans la Figure III-13.
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
-400
-200
0
200
400
v
a
b
c
[
V
]
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
-400
-200
0
200
v
a
b
c
,
d
[
V
]
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
-100
0
100
v
a
b
c
,
i
[
V
]
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
-100
0
100
Temps [s]
v
a
b
c
,
h
[
V
]
v
AN
v
BN
v
CN
v
AN,d
v
BN,d
v
CN,d
v
AN,i
v
BN,i
v
CN,i
v
AN,h
v
BN,h
v
CN,h
T/4
T/4
Figure III-13 : Effet du retard sur les composantes symtriques de la tension
CHAP. III : SEH en conditions de dsquilibre
110
Jusqu' linstant t=0,04 s, la tension triphase v
abc
est quilibre et par consquent, la
tension de squence inverse v
abc ,i
et la tension de squence homopolaire v
abc ,h
sont nulles.
Aprs linstant t=0,04 s, la tension v
abc
dvient dsquilibre, ce qui fait apparatre les
squences inverse et homopolaire. Comme montr dans la Figure III-13, les vraies amplitudes
pour les trois systmes de squence directe, inverse et homopolaire sont obtenues aprs T/4, la
dure du retard introduit pour lobtention de la partie imaginaire de lquations III-31.
La mme mthode de dcomposition est applique aussi au courant triphas mesur.
III.5.2.2 Transformations appliques la tension de squence directe
Comme montr dans la section III.2.1, la squence directe a une succession de phases
normales ABC. Ainsi, en exprimant le systme triphas de squence directe (Eq. III-38), dans
un rfrentiel dq0 qui tourne dans le sens antihoraire, nous avons :
0
) sin(
) cos(
, 0
,
,
d
d
d
d
d q
d d
V
v
v
v
Eq. III-41
La Figure III-14 prsente graphiquement la transformation de la tension triphase de
squence directe en tensions continues v
d,d
et v
d,q
, en utilisant un rfrentiel tournant dans le
sens antihoraire. La somme des trois tensions de squence directe tant nulle, la composante 0
de la tension ne va pas tre prise en compte.
v
AN,d
+ v
BN,d
+ v
CN,d
= 0
d
q
Rfrentiel tournant dans le sens
antihoraire
Figure III-14 : Transformation de la tension triphase de squence directe en signaux continus
Aprs avoir transform la tension de squence directe en grandeurs continues dq, ces
dernires peuvent tre facilement traites par des rgulateurs PI.
CHAP. III : SEH en conditions de dsquilibre
111
Lobtention de la tension de squence directe, sa transformation en coordonnes
continues dq, mais aussi les autres transformations appliques pour obtenir les signaux de
commande sont illustres dans la Figure III-15 :
Re
[ ]
d
F
[ ]
abc
v
[ ]
d abc
v
,
[ ]
d abc
v
,
C
[ ]
d dq
v
,
[ ]
*
,d dq
v
[ ]
*
,d abc
v
( )
[ ]
P
T
( )
[ ]
1
P
T
[ ]
*
abc
v
C
x
4
T
Delay +
v
abc
abc
v
+
Cx j
( )
[ ]
P
T =transformation de Park
C =calculs de compensation appliqus au signal
[ ]
abc
v
Figure III-15 : Transformations appliques la tension de squence directe
III.5.2.3 Transformations appliques la tension de squence inverse
La succession des phases pour le systme de squence inverse (Eq. III-39) est inverse
par rapport la squence directe. Par consquent, pour transformer la tension de squence
inverse en grandeurs continues, il faut utiliser un rfrentiel qui tourne en sens horaire, la
frquence fondamentale. Ainsi, en multipliant le systme triphas (Eq. III-39) par la matrice
de Park, pour laquelle devient -, nous retrouvons des grandeurs continues (Eq. III-40).
0
) sin(
) cos(
, 0
,
,
i
i
i
i
i q
i d
V
v
v
v
Eq. III-42
Ce changement de base est aussi illustr dans la Figure III-16 :
CHAP. III : SEH en conditions de dsquilibre
112
v
AN,i
+ v
BN,i
+ v
CN,i
= 0
d
q
Rfrentiel tournant dans l e sens
horaire
Figure III-16 : Transformation de la tension triphase de squence inverse en signaux continus
Les transformations prsentes dans la Figure III-15 sont compltes par les
transformations appliques la tension de squence inverse (Figure III-17).
Re
[ ]
d
F
[ ]
abc
v
[ ]
abc
v
[ ]
d abc
v
,
[ ]
d abc
v
,
C
[ ]
d dq
v
,
[ ]
*
,d dq
v
[ ]
*
,d abc
v
( )
[ ]
P
T
( )
[ ]
1
P
T
[ ]
*
abc
v
C
x Re
[ ]
i
F
[ ]
i abc
v
,
[ ]
i abc
v
,
C
[ ]
i dq
v
,
[ ]
*
,i dq
v
[ ]
*
,i abc
v
( )
[ ]
P
T
( )
1
P
T
4
T
Delay
+
v
abc
abc
v
+
Cx j
( )
[ ]
P
T =transformation de Park
C =calculs de compensation appliqus au signal
Figure III-17 : Transformations appliques la tension de squence inverse
III.5.2.4 Transformations appliques la tension de squence homopolaire
Le but de la stratgie de commande base sur les composantes symtriques est
dliminer les squences inverse et homopolaire de la tension en rgime dsquilibr. Comme
montr dans la section prcdente, la squence inverse peut tre transforme en composantes
continues et donc, peut tre facilement traite en utilisant des rgulateurs PI. Au contraire, la
squence homopolaire de la tension dans un rfrentiel dq0 apparat comme une perturbation
CHAP. III : SEH en conditions de dsquilibre
113
sur la composante 0. En effet, en appliquant la transforme de Park au systme dcrit par Eq.
III-40 nous obtenons :
+
=
) cos(
0
0
, 0
,
,
h
h
h
h q
h d
t
V
v
v
v
Eq. III-43
Il existe deux possibilits dliminer la squence homopolaire. La premire suppose
lutilisation dun rgulateur classique en parallle avec un filtre passe-bande la frquence de
rsonance [91]. Le dsavantage de cette mthode est quen rgime transitoire, le rgulateur
a besoin de plusieurs priodes pour liminer lerreur statique.
La deuxime possibilit suppose la compensation de la valeur efficace de la perturbation
homopolaire. Parce que la squence homopolaire comporte trois tensions superposes, sa
valeur efficace ne peut pas tre accessible quavec un retard dapproximativement une priode
(20 ms). Ce retard est beaucoup trop long pour envisager cette solution dans la stratgie de
commande.
Une autre solution qui permet de transformer la squence homopolaire en
composantes continues sera prsente par la suite.
Comme prcis dans la section III.2.1, les vecteurs dun systme triphas de squence
homopolaire sont en phase et gaux en amplitude. Ils sont galement indpendants du point
de vue de lamplitude par rapport aux systmes de squence directe et homopolaire.
Rappelons aussi que le systme des phaseurs de tension de squence homopolaire obtenu avec
la mthode illustre dans la Figure III-12 est le rsultat du produit entre les phaseurs de
tensions dsquilibres et la matrice homopolaire [F
h
]. Cette reprsentation phasorielle permet
la localisation des vecteurs de tension dans lespace et par consquent, pour la squence
homopolaire, il est possible de dphaser les vecteurs de tension de 120, sans affecter
lamplitude. Ainsi, si au dpart la matrice homopolaire avait lexpression III-40, elle devient
celle de III-45 [93][94].
[ ]
=
1 1 1
1 1 1
1 1 1
3
1
h
F Eq. III-44
CHAP. III : SEH en conditions de dsquilibre
114
[ ]
=
2 2 2
*
1 1 1
3
1
a a a
a a a F
h
Eq. III-45
o
=
3
2
sin
3
2
cos
j a
Le nouveau systme triphas de squence homopolaire devient :
[ ] [ ][ ]
abc h
h abc
v F v
*
,
*
= Eq. III-46
Graphiquement, les vecteurs v
BN,h
et v
CN,h
du systme triphas de squence
homopolaire, initialement ayant la mme orientation que le vecteur v
AN,h
, sont dphass 120
et respectivement 240 par rapport ce dernier (Figure III-18).
v
A,h
v
B,h
v
A,h
120
v
B,h
v
C,h
v
A,h
240
Figure III-18 : Dphasage des vecteurs du systme homopolaire
Il est important de ne pas perdre de vue que le but des transformations appliques la
squence homopolaire est de pouvoir la transformer en coordonnes continues dq tout en
gardant lamplitude du systme originel. La conservation de lamplitude est importante, car le
but de la stratgie de commande est de compenser la squence homopolaire.
Aprs ces transformations de phase, le systme de squence homopolaire (Eq. III-44) (la
partie relle) devient :
( )
+
+ +
+
=
)
3
2
cos(
)
3
2
cos(
cos
*
,
*
,
*
,
h
h
h
h
h CN
h BN
h AN
t
t
t
V
v
v
v
Eq. III-47
CHAP. III : SEH en conditions de dsquilibre
115
Ainsi, la tension de squence homopolaire devient un systme triphas quilibr
succession de phases ACB. Il peut donc tre dcompos en coordonnes continues dq en
utilisant un rfrentiel tournant en sens horaire. Une fois transforme en coordonnes
continues dq, nous pouvons appliquer facilement les calculs de compensation de la squence
homopolaire en utilisant des rgulateurs PI. Aprs ces calculs de compensation, nous avons
appliqu les transformations inverses pour obtenir les signaux de commande. Toutes les
transformations appliques au signal de squence homopolaire sont illustres dans la Figure
III-19. Pour dmontrer que la squence homopolaire nest pas affecte par les transformations
appliques, nous avons montr dans la Figure III-19, que, pour chaque transformation directe,
il existe une transformation inverse. La transformation inverse en grandeurs phasorielles nest
pas ncessaire car les signaux de commande sont des grandeurs relles. De plus, les calculs de
compensation effectus pour la squence homopolaire en coordonnes dq (aditions et
multiplications) sont les mmes que si on ralisait la compensation directe de la composante 0
(voir section III-5.1).
La transformation inverse des grandeurs homopolaires dphases en trois grandeurs
superposes est donne par lquation III-48.
[ ] [ ] [ ]
*
,
1
* *
,
*
h abc
h
h abc
v F v
= Eq. III-48
o [ ]
0 0 1
0 0 1
0 0 1
1
*
h
F .
[ ]
abc
v [ ]
abc
v
C
x Re
[ ]
h
F
[ ]
h abc
v
,
[ ]
*
,h abc
v
C
[ ]
*
,h dq
v [ ]
*
,
*
h dq
v
( )
[ ]
P
T
( )
1
P
T
4
T
Delay
+
v
abc
abc
v
+
Cx j
( )
[ ]
P
T =transformation de Park
C =calculs de compensation appliqus au signal
[ ]
*
h
F
[ ]
*
,h abc
v
[ ]
1
*
h
F
[ ]
*
,h abc
v
[ ]
*
,
*
h abc
v
Figure III-19 : Transformations applique la tension de squence homopolaire
Aprs les calculs de compensation de toutes les squences, les signaux obtenus seront
ramens dans la base de dpart (ABC) et additionns phase par phase pour obtenir ensuite les
CHAP. III : SEH en conditions de dsquilibre
116
signaux de commande. La chane complte de transformations utilises dans la stratgie de
commande pour traiter le signal de tension est illustre dans la Figure III-20.
Toutes les transformations utilises pour la tension triphase sont appliques
galement au courant triphas mesur et trait dans la stratgie de commande.
Re [ ]
d
F
[ ]
abc
v
[ ]
abc
v
[ ]
d abc
v
,
[ ]
d abc
v
,
[ ]
d dq
v
,
[ ]
*
,d dq
v [ ]
*
,d abc
v
( )
[ ]
P
T
( )
[ ]
1
P
T
[ ]
*
abc
v
C
x Re [ ]
i
F
[ ]
i abc
v
,
[ ]
i abc
v
,
[ ]
i dq
v
,
[ ]
*
,i dq
v [ ]
*
,i abc
v
( )
[ ]
P
T
( )
1
P
T
4
T
Delay
+
v
abc
abc
v
+
Cx j
( )
[ ]
P
T =transformation de Park
C
Re
[ ]
h abc
v
,
[ ]
*
,h abc
v
C
[ ]
*
,h dq
v [ ]
*
,
*
h dq
v
( )
[ ]
P
T
( )
1
P
T
[ ]
*
h
F
[ ]
*
,h abc
v
[ ]
1
*
h
F
[ ]
*
,h abc
v
[ ]
*
,
*
h abc
v
C
C
[ ]
h
F
=calculs de compensation appliqus au signal
Figure III-20 : Transformation complte appliques la composante fondamentale de la tension
III.5.2.5 Stratgie de commande complte
La structure complte de la commande-dih base sur les composantes symtriques de
la tension et du courant est illustre dans la Figure III-21. Elle est constitue par deux boucles
de rgulation [95], une boucle interne de courant et un boucle externe de tension sur trois
voix. Les courants et les tensions mesurs la sortie du filtre sont dabord dcomposs en les
trois systmes de squence directe, inverse et homopolaire. Puis, ces systmes triphass sont
transforms en grandeurs continues en utilisant diffrents rfrentiels tournants comme dcrit
dans la section prcdente. Les trois squences de tensions et courants en coordonnes dq sont
traites indpendamment par trois voix de rgulation. La squence directe de la tension et du
courant est rgule par des rgulateurs PI, dans un rfrentiel positif, et les squences inverse
et homopolaire sont rgules par des rgulateurs PI, dans un rfrentiel ngatif.
CHAP. III : SEH en conditions de dsquilibre
117
Charge
Dcomposition
des Squences
&
abc/dq
G
D
Energie
renouvelable
dq/abc
&
Composition
des squences
L
f
v
CN
v
BN
v
AN
i
c
i
b
i
a
i
d,h
i
q,h
i
d,i
i
q,i
i
d,d
i
q,d
i
*
d,d
i
*
q,d
i
*
q,i
i
*
q,h
i
*
d,i
i
*
d,h
i
dq,d
i
dq,i
i
dq,h
v
dq,d
v
dq,i
v
dq,h
v
*
d,d
v
*
q,d
v
*
dg,i
v
*
q,i
v
*
d,h
v
*
q,h
v
dgdp
v
qg,d
v
dg,i
v
qg,i
v
qg,h
v
dg,h
v
d,d
v
fd,d
v
fq,d
v
fd,i
v
fq,i
v
fd,h
v
fq,h
d
a
d
b
d
c
Dcomposition
des Squences
&
abc/dq
+
-
+
-
-
+
+
+
+
+
+
+
-
-
+
+
+
+
-
-
-
-
v
q,h
+
+
+
+
v
q,h
PI
PI PI
PI
PI
PI
PI
L
f
v
d,i
+
+
+
PI
PI
v
q,i
+
-
+
+
-
-
v
q,d +
+
PI
PI
PI
-
-
L
f
L
f
L
f
+
+
i
c
i
b
i
a
i
N
i
CD
i
BD
i
AD
i
Cch
i
Bch i
Ach
VCC
Hacheur
survolteur
PI
+
-
Vbat
db
Ib Icb
V
*
CC
Commande du
bus CC
Figure III-21 : Stratgie de commande-dih
La stratgie prsente dans la Figure III-21 permet la compensation des perturbations
entranes par les squences inverse et homopolaire. Ainsi, la tension en sortie du filtre, dans
le point commun de couplage, devient bien quilibre.
Dans la Figure III-21, les termes -L
f
i
q,d
, L
f
i
d,d
, L
f
i
q,i
, -L
f
i
d,i
, sont insrs pour
dcoupler la dynamique des axes dq. Ils ont t calculs en utilisant le mme raisonnement
que dans le cas de la stratgie de commande-dq0.
Soit la tension la sortie et lentre du filtre et le courant sous la forme compacte dcrite par
les quations III-49 III-51 :
[ ] [ ]
T
cf bf af f
v v v v = Eq. III-49
[ ] [ ]
T
CN BN AN
v v v v = Eq. III-50
[ ] [ ]
T
c b a
i i i i = Eq. III-51
CHAP. III : SEH en conditions de dsquilibre
118
Chaque systme dcrit par les quations III-49 III-51 peut tre dcompos en
utilisant les composantes symtriques, en :
[ ] [ ] [ ] [ ]
h f i f d f f
v v v v
, , ,
+ + = Eq. III-52
[ ] [ ] [ ] [ ]
h i d
v v v v + + = Eq. III-53
[ ] [ ] [ ] [ ]
h i d
i i i i + + = Eq. III-54
o :
[ ] [ ]
T
d cf d bf d af d f
v v v v
, , , ,
= , [ ] [ ]
T
i cf i bf i af i f
v v v v
, , , ,
= , [ ] [ ]
T
h cf h bf h af h f
v v v v
, , , ,
= sont les
tensions de squence directe, inverse et homopolaire lentre du filtre ;
[ ] [ ]
T
d CN d BN d AN d
v v v v
, , ,
= , [ ] [ ]
T
i CN i BN i AN i
v v v v
, , ,
= , [ ] [ ]
T
h CN h BN h AN h
v v v v
, , ,
= sont les
tensions de squence directe, inverse et homopolaire la sortie du filtre ;
[ ] [ ]
T
d c d b d a d
i i i i
, , ,
= , [ ] [ ]
T
i c i b i a i
i i i i
, , ,
= , [ ] [ ]
T
h c h b h a h
i i i i
, , ,
= sont les courants de
squence directe, inverse et homopolaire dans londuleur. Par la suite, le premier indice avant
la virgule, pour les grandeurs prsentes, est li aux rfrentiels et lindice aprs la virgule est
li la squence directe, inverse ou homopolaire.
Boucle externe de rgulation de la tension :
La boucle externe de rgulation donne les consignes des courants {i
*
d,d
, i
*
q,d
, i
*
d,i
, i
*
q,i
,
i
*
d,h,
i
*
q,h
}, en fixant les squences directe, inverse et homopolaire de la tension en coordonnes dq. La
squence directe de la tension v
d,d
est compare lamplitude de la tension dsire et lerreur est
traite par un rgulateur PI. Toutes les autres tensions {v
q,d
, v
d,i
, v
q,i
, v
d,h
, v
q,h
} sont fixes 0 en
utilisant la mme procdure.
Boucle interne de rgulation du courant :
Le courant de squence directe, dans la premire voix de rgulation de la stratgie de
commande prsente dans la Figure III-21, est rgul dans un rfrentiel positif et les tensions
de squence directe v
fd,d
, v
fq,d
ont les expressions :
( )( )
p q f d d d d d d d fd
i L i i PI v v
, ,
*
, , ,
+ = Eq. III-55
( )( )
d q f d q d q d q d fq
i L i i PI v v
, ,
*
, , ,
+ + = Eq. III-56
CHAP. III : SEH en conditions de dsquilibre
119
Le courant de squence inverse, dans la deuxime voix de rgulation de la stratgie de
commande, est rgul dans un rfrentiel ngatif et les tensions de squence inverse v
fd,i
, v
fq,i
ont les expressions :
( )( )
i q f i d i d i d i fd
i L i i PI v v
, ,
*
, , ,
+ + = Eq. III-57
( )( )
i q f i q i q i q i fq
i L i i PI v v
, ,
*
, , ,
+ = Eq. III-58
Le courant de squence homopolaire, dans la troisime voix de rgulation de la
stratgie de commande est rgul dans un rfrentiel ngatif et les tensions de squence
homopolaire v
fd,h
, v
fq,h
ont les expressions :
( )( )
h d h d h d h fd
i i PI v v
,
*
, , ,
+ = Eq. III-59
( )( )
h q h q h q h fq
i i PI v v
,
*
, , ,
+ = Eq. III-60
La synthse des rgulateurs PI utiliss dans les boucles de rgulation a t ralise par
la mthode de placement de ples. Les paramtres des rgulateurs sont prsents dans
lAnnexe E.
Les signaux de commande [d
af
d
bf
d
cf
]
T
(les rapports cycliques) sont obtenus en
appliquant dabord la transformation inverse Park et Clarke (Annexe D) aux signaux {v
fd,d
,
v
fq,d
, v
fd,i
, v
fq,i
, v
fd,h
, v
fq,h
}. Ensuite, rsultat de cette transformation, les composantes
symtriques en rfrentiel abc (Figure III-22) sont composes phase par phase.
Sequence
composition
d
af
d
bf
d
cf
v
*
abc,d
v
fdq,h
v
fdq,i
v
fdq,d
v
*
abc,i
v
*
a,h
abc
dq
-
abc
dq
-
abc
dq
Figure III-22 : Transformation dq-abc et composition des squences
Il est important de rappeler que la composition des squences utilise trois phases
homopolaires identiques (voir section III.2.1). Parce que, actuellement, la squence
homopolaire v
*
abc,h
comporte trois signaux avec la mme amplitude et dphass tel que deux
CHAP. III : SEH en conditions de dsquilibre
120
phases conscutives sont dphas 120, seule la phase A est utilise pour obtenir les rapports
cycliques (Eq. III-58).
+ +
+ +
+ +
=
*
,
*
,
*
,
*
,
*
,
*
,
*
,
*
,
*
,
1
h a i c d c
h a i b d b
h a i a d a
CC
cf
bf
af
v v v
v v v
v v v
v
d
d
d
Eq. III-61
CHAP. III : SEH en conditions de dsquilibre
121
III.6 Conclusions
Dans ce chapitre, deux stratgies de commande ont t dveloppes partir du modle
du convertisseur quatre bras.
La premire stratgie utilise deux boucles de rgulation pour rguler la tension et le
courant dsquilibrs la sortie du convertisseur en coordonnes dq0. Si les axes d et q sont
coupls, laxe 0 est indpendant. Lorsque la charge est dsquilibre, lexistence de la
squence inverse entrane des oscillations la pulsation 2 des composantes dq et lexistence
de la squence homopolaire entrane des oscillations la pulsation de la composante 0.
La deuxime stratgie est base sur la dcomposition des systmes triphass de
tension et de courant dsquilibrs instantans en coordonnes symtriques directe, inverse et
homopolaire. La mthode de dcomposition utilise la reprsentation phasorielle. Elle est
ralise avec un retardement des signaux mesurs dun quart de priode de la frquence
fondamentale et elle applique un dphasage de 120 entre les vecteurs homopolaires
initialement superposs. Les squences directe, inverse et homopolaire sont des composantes
continues dans leur propre rfrentiel tournant dq ; chacune delles est efficacement rgule
par des rgulateurs PI. Les signaux de commande sont obtenus en appliquant les transformes
inverses de Park et de Clarke et en additionnant phase par phase les trois systmes triphass
de squence directe, inverse et trois fois la phase A homopolaire.
Les performances des stratgies de commande prsentes dans ce chapitre sont
analyses dans le chapitre suivant.
CHAP. IV : RESULTATS DE SIMULATION
Chap. IV : Rsultats de simulation
125
CHAP. IV : RESULTATS DE SIMULATION
IV.1 Introduction
Dans les deux chapitres prcdents, nous avons prsent les bases qui ont permis de
dvelopper sous lenvironnement MATLAB/Simulink, les modles de simulation de tous les
composants du SEH illustr dans la Figure II-7. Ces modles de simulation peuvent tre
utiliss de manire modulaire, ce qui permet dadapter le modle aux objectifs des
simulations. Les paramtres des composants du SEH sont donns dans lAnnexe B.
Dans ce chapitre, structur en deux parties, les simulations font appel des situations
varies et reprsentatives des difficults potentielles rencontres par les SEH. Ainsi, dans la
premire partie, lattention est focalise sur le comportement du SEH face aux variations
climatiques et de charge triphases quilibres. Nous analysons lefficacit des systmes de
commande des sources dnergie renouvelable et la stabilit des bus CC et CA. Pour cette
partie, le modle de simulation du SEH est celui prsent dans le Chapitre II.
Dans la deuxime partie, le SEH est analys en rgime de charge dsquilibre. Les outils de
simulation utiliss sont bass sur les modles dvelopps dans le Chapitre III. Pour largir le
champ d'investigation et illustrer la capacit de la stratgie de commande-dih par rapport la
stratgie de commande-dq0, nous avons test le SEH quip de londuleur quatre bras avec
diffrents types de dsquilibre. Un premier test est ralis en rgime de dsquilibre
permanent avec des charges monophases de valeurs diffrentes, distribues sur les trois
phases du SEH. Dans un deuxime test ralis en condition de dsquilibre transitoire, seule
la phase A du SEH est charge diffremment.
IV.2 Analyse du comportement dynamique du SEH
Dans cette section, nous allons analyser dabord le comportement dynamique du SEH
soumis des variations climatiques (vent et clairement), dans le but dtudier lefficacit des
stratgies de commande permettant aux sources dnergie renouvelable doptimiser le
rendement nergtique. La stabilit du bus CC est galement analyse du point de vue de la
Chap. IV : Rsultats de simulation
126
rgulation de la tension. Nous examinons ensuite le comportement de la tension sur le bus
CA et le bus CC face aux variations rapides de charge CA.
IV.2.1 Variations climatiques
IV.2.1.1 Variation du vent
Une premire simulation est ralise pour tester lefficacit de la stratgie de
commande permettant lolienne de poursuivre le point de puissance maximale. Le profil de
vent utilis [43] pour cette simulation est prsent dans la Figure IV-1.
Figure IV-1 : Vitesse du vent
Durant cette simulation, seule la puissance dlivre par lolienne varie. La puissance
demande par la charge est constante.
La Figure IV-2 prsente lefficacit avec laquelle le gnrateur asynchrone de
lolienne poursuit la vitesse optimale. Cette dernire, en pointill sur la figure, est lie la
vitesse instantane du vent par la vitesse spcifique optimale
opt
. Nous constatons que la
vitesse de la machine lectrique suit bien la vitesse optimale. Lcart existant entre les deux
courbes est caus par linertie du systme olien.
Chap. IV : Rsultats de simulation
127
Figure IV-2 : Performance de la commande de poursuite de la vitesse de rotation optimale
Dans une deuxime simulation, un chelon de vitesse du vent est utilis pour illustrer
la rponse du systme de poursuite du point de puissance maximale (voir section II.3.1.6) et
pour analyser lvolution de la tension sur le bus CC.
Pour cet essai, la vitesse du vent varie de 5 m/s 9 m/s puis nouveau 5 m/s. Cette
variation correspond une vitesse optimale larbre denviron 600 et 1100 rpm
respectivement (Figure IV-3). Lvolution des composantes i
sd
du courant statorique lie au
flux de la machine lectrique et i
sq
lie au couple de la mme machine (voir section II.3.1.6)
est aussi prsente dans la Figure IV-3.
Figure IV-3 : Performances de la stratgie de commande pour une variation du vent de type chelon
Chap. IV : Rsultats de simulation
128
Nous remarquons que la vitesse de la machine lectrique suit les variations de la
composante i
sq
du courant statorique, associe au couple optimal, pendant que la composante
i
sd
reste constante.
Comme montr dans le chapitre II, la liaison entre les sources dnergie renouvelable
et londuleur est ralise par le biais dun bus CC. La rgulation de la tension continue V
cc
sur ce bus est mise en uvre par un hacheur rversible en courant, connect un banc de
batteries. La dynamique de V
cc
pour le mme chelon de vitesse est prsente dans la Figure
IV-4. Nous constatons qu linstant t=10 s, le hacheur fournit un courant i
cch
positif sur le bus
CC. Cela signifie que les batteries assurent une partie de lnergie demande par la charge.
A linstant o la vitesse du vent change, le surplus dnergie produit par lolienne est envoy
dans le banc de batteries (t=27 s). Au moment t=53 s, la vitesse du vent a de nouveau la
valeur initiale et les batteries se dchargent pour assurer lnergie demande par la charge.
Durant cet essai, la tension V
cc
reste constante, ce qui montre un excellent comportement du
systme de rgulation de la tension.
Figure IV-4 : Dynamique du bus CC pour un chelon de vent
IV.2.1.2 Variation dclairement
Pour tester lefficacit de lalgorithme MPPT utilis dans le systme de conversion
photovoltaque, nous avons utilis un profil dclairement rel. Il sagit de lclairement
nergtique global sur une surface horizontale obtenue partir de mesures ralises ct du
Chap. IV : Rsultats de simulation
129
Havre, lors dune journe avec des variations dclairement importantes, dues aux passages
frquents des nuages. Son profil est prsent dans la Figure IV-5.
Figure IV-5 : Eclairement nergtique global sur une surface horizontale lors dune journe clairement
variable
Pour cet essai, la temprature est garde constante 25C et seule la puissance fournie
par le systme photovoltaque varie. La puissance photovoltaque rcupre P
pv
et la
puissance incidente maximale P
pv,in
, qui peut tre rcupre avec la surface des panneaux
exploite, sont illustres dans la Figure IV-6. La puissance incidente maximale est le produit
entre lclairement, la surface des panneaux exploite et le rendement du systme PV.
Figure IV-6 : Puissance PV incidente sur la surface des panneaux et puissance PV rcupre
Chap. IV : Rsultats de simulation
130
Nous constatons une bonne rponse du systme de poursuite du point de puissance
maximale. La variabilit du rendement du systme PV avec lclairement nergtique est la
cause des pertes enregistres pour des valeurs dclairement faibles.
Une deuxime simulation a t ralise pour analyser lvolution de la tension dans le
bus CC face un chelon dclairement. Celui-ci varie de 400 800 W/m
2
. Pendant ce test,
les autres sources du SEH fournissent une puissance constante et il ny a pas de variations de
charge. Les rsultats de cet essai de simulation sont illustrs dans la Figure IV-8.
Comme nous pouvons le constater, jusquau moment t=15s, une partie de la puissance
demande par la charge est fournie par les batteries (le courant I
cch
est positif). Au moment
t=15s, le surplus de puissance fournie par le systme photovoltaque va dans le banc de
batteries et le courant I
cch
devient ngatif. A t=30 s, lclairement nergtique reprend la
valeur initiale et le courant qui traverse le hacheur redevient positif (les batteries se
dchargent).
Figure IV-8 : Dynamique du bus CC pour un chelon dclairement
La dynamique rapide du rgulateur de la tension V
cc
permet de la maintenir constante sa
valeur de rfrence.
Chap. IV : Rsultats de simulation
131
IV.2.2 Variation de charge
IV.2.2.1 Variation de charge rsistive
Dans cette section, le SEH est soumis des variations de charge pour analyser
lvolution du bus CA et du bus CC.
Une premire simulation est ralise en faisant varier une charge rsistive triphase
quilibre de 30 KW 50 KW, puis nouveau 30 KW. Les deux chelons ont lieu un
intervalle de 0,13 s. Pour cette simulation, le SEH est quip de londuleur modlis dans le
Chapitre II, bas sur une configuration trois bras et de la stratgie de commande classique
dcomposition dq (voir section II.3.4). Le bilan des puissances en SEH avant et aprs le
premier chelon de puissance de la charge rsistive est illustr dans la Figure IV-9.
P
ol
P
pv
P
GD
7 KW
8.5 KW
30,5 KW
P
gnre
=P
bat
+P
ch
16 KW
30KW
P
bat
P
ch
4
K
W
50 KW
P
bat
P
ch
P
ol
P
pv
P
GD
7 KW
8.5KW
30,5KW
P
gnre
+P
bat
=P
ch
(a) (b)
Figure IV-9 : Bilan des puissances en SEH (a) avant la variation de charge, (b) aprs le premier chelon
Dans la Figure IV-9(a), jusquau dbut de la variation de la charge rsistive, la
puissance demande par celle-ci est assure par le gnrateur diesel. Le surplus de puissance
gnre par ce dernier et la puissance gnre par les sources dnergie renouvelable va dans
les batteries. Rappelons que le GD et la charge rsistive sont tous les deux du cot du bus
CA. Aprs son augmentation, la charge absorbe la totalit de la puissance gnre par les
sources et le reste est fourni par les batteries (Figure IV-9(b)).
La dynamique du bus CA pendant les variations de charge est illustre dans les
Figures IV-10 et IV-11. Sachant que nous avons choisi une charge purement rsistive, le
dphasage entre le courant dans une phase et la tension simple correspondante est zro. Par
Chap. IV : Rsultats de simulation
132
consquent, les courants de charge seront utiliss pour mesurer les facteurs de puissance (le
facteur de puissance est donn par le dphasage entre le courant et la tension). Ainsi, dans la
Figure IV-10, jusqu linstant t=1 s, le dphasage entre le courant i
on
dans londuleur et la
tension est de 105, ce qui correspond une puissance active transfre vers les batteries
(londuleur charge les batteries). Aprs linstant t=1 s, la puissance demande par la charge
augmente. Cette variation est suivie par un rgime transitoire durant lequel les courants du
gnrateur diesel sont dsquilibrs. J usqu linstant t=1,13 s (retour aux conditions
initiales), le dphasage entre le courant dans londuleur et la tension est de 10, ce qui
correspond une puissance active transfre vers la charge. Comme nous pouvons le
constater, la commande de londuleur ragit vite la variation de charge, mais le dsquilibre
existant sur les courants du gnrateur diesel pendant le rgime transitoire entrane un faible
dsquilibre sur les courants de la charge. A linstant t=1,13 s, la charge revient la valeur
initiale 30 kW et entrane un nouveau transitoire accompagn par des dsquilibres sur les
courants du gnrateur diesel et un changement de phase pour le courant triphas dans
londuleur.
1 1.05 1.1 1.15 1.2
-50
0
50
i
o
n
[
A
]
1 1.05 1.1 1.15 1.2
-100
0
100
i
G
D
[
A
]
1 1.05 1.1 1.15 1.2
-100
0
100
Temps [s]
i
c
h
[
A
]
A B C
A B C
A B C
Figure IV-10 : Courants des sources triphases et courant de la charge pendant les variations de charge
La Figure IV-11 prsente lvolution de la tension sur le bus CA pendant les
variations de charge. La commande de londuleur est affecte par le comportement du
Chap. IV : Rsultats de simulation
133
gnrateur diesel, ce qui entrane un faible dsquilibre sur la tension pendant les rgimes
transitoires. Nous remarquons galement sur la tension, la prsence des surtensions
transitoires gnres par le filtre RL la sortie de londuleur.
Figure IV-11 : Evolution de la tension face aux variations de charge
La Figure IV-12 illustre la dynamique du bus CC pour le mme chelon de charge.
Comme nous pouvons le remarquer, pour une variation de lamplitude du courant de charge
I
ch am
, denviron 40 A, la tension V
cc
oscille lgrement, mais retrouve sa valeur de rfrence
en moins de 50 ms.
Figure IV-12 : Dynamique du bus CC pendant les variations de charge
Chap. IV : Rsultats de simulation
134
IV.2.2.1 Variation de charge RLE
La dynamique du bus CA et du bus CC a t galement analyse pour une
variation de charge RLE et les rsultats de cette analyse sont prsents dans cette section.
Pour cette simulation, le gnrateur diesel est considr comme une charge ngative. Pour
tudier les effets entrans par une variation de charge RLE, nous avons dconnect le
gnrateur diesel en pleine charge. La reconnexion du gnrateur diesel dans le SEH ne fait
pas lobjet de cette analyse. Cette reconnexion exige la mise en place dun processus de
synchronisation des sources. Ce processus na pas t tudi dans cette thse.
La configuration du SEH pour cette simulation est la mme que celle utilise pour le
test de variation de charge rsistive. Le bilan des puissances en SEH, avant et aprs la
dconnexion du gnrateur diesel, est illustr dans la Figure IV-13.
P
ol
P
pv
P
GD
12,5 KW
13 KW
30,5 KW
16 KW
40 KW
P
bat
P
ch
P
gnre
=P
bat
+P
ch
P
ol
P
pv
12,5KW
13KW
40 KW
P
bat
P
ch
14,5
KW
P
gnre
+P
bat
=P
ch
(a) (b)
Figure IV-13 : Bilan des puissances en SEH (a) avant la dconnexion du GD, (b) aprs la dconnexion du
GD
La Figure IV-13(a) illustre le bilan des puissances du SEH avant la dconnexion du
gnrateur diesel. La puissance demande par la charge est assure en grande partie par le
gnrateur diesel avant quil soit dconnect. Le surplus de puissance fournie par les sources
dnergie renouvelable est absorb par les batteries. Aprs la dconnexion du gnrateur
diesel (Figure IV-13(b)), la puissance demande par la charge est fournie par les sources
dnergie renouvelable et la diffrence est assure par les batteries.
Dans les Figures IV-14 et IV-15, nous avons prsent lvolution des grandeurs
lectriques du bus CA avant, aprs et pendant la dconnexion du gnrateur diesel. Comme
Chap. IV : Rsultats de simulation
135
nous pouvons le remarquer dans la Figure IV-14, avant linstant t=1 s, le gnrateur diesel
fournit la plupart du courant absorb par la charge et londuleur fournit la diffrence.
Figure IV-14 : Courants des sources triphases et courant de la charge avant et aprs la dconnexion du
GD
Aprs linstant t=1 s (dconnexion du gnrateur diesel), le courant absorb par la
charge est assur en totalit par londuleur. Nous constatons que ce dernier ragit trs vite, ce
qui rend possible une bonne continuit dans lalimentation de la charge.
La Figure IV-15 illustre lvolution de la tension sur le bus CA, au moment de la
dconnexion du gnrateur diesel.
Figure IV-15 : Tension sur le bus CA au moment de la dconnexion du GD
Chap. IV : Rsultats de simulation
136
A part quelques faibles surtensions transitoires au moment de la dconnexion du gnrateur
diesel, la tension sur le bus CA reste quilibre et bien sinusodale.
Lvolution du bus CC au moment de la dconnexion du gnrateur diesel est
prsente dans la Figure IV-16. Nous constatons quau moment de la dconnexion, le courant
dans le bus CC passe de 14 A environ 60 A. Malgr cette variation, lamplitude des
oscillations de la tension autour de sa rfrence nest pas trs importante. Ces oscillations sont
de plus amorties, comme pour la perturbation prcdente, en moins de 50 ms.
Figure IV-16 : Evolution du bus CC avant, aprs et au moment de la dconnexion du GD
Ltude du comportement dynamique de la tension du bus CC face toutes ces
perturbations a permis de constater que la rgulation de la tension V
cc
compense ces
perturbations. On a notamment remarqu que les transitoires faits suite ces perturbations
sont courts et que lamplitude des oscillations ayant lieu dans ces transitoires est trs faible
(0,3 % de V
*
cc
). Par consquent, ces simulations dmontrent que la partie CC et celle CA
du SEH peuvent tre tudies sparment.
IV.3 Analyse du SEH en rgime dsquilibr
Les diffrentes sources utilises dans un SEH sont en gnral tudies en supposant un
fonctionnement quilibr. Le fonctionnement dsquilibr est considr comme tant un
fonctionnement anormal. En ralit, les dsquilibres sont trs rpandus, surtout dans un SEH
isol (autonome).
Chap. IV : Rsultats de simulation
137
Dans cette section, le SEH est analys dans des conditions de charge dsquilibre. Le
SEH est quip dun onduleur autonome deux stratgies de commande diffrentes. Les deux
stratgies utilises ont t prsentes dans le chapitre prcdent.
Lanalyse ralise dans la section prcdente a rvl un comportement bien stable du
bus CC. Ainsi, la suite des simulations, qui ne concernent que le bus CA et qui sont assez
courtes, peuvent tre ralises en simplifiant le modle de simulation du SEH prsent au
Chapitre II, en ne modlisant ni les sources dnergie renouvelable, ni les batteries, ni les
systmes de commande correspondants.
Dans cette section, le comportement du SEH est analys en rgime de dsquilibre
permanent et transitoire.
IV.3.1 Rgime dsquilibr permanent
Pour cette simulation, le SEH alimente en nergie une charge rsistive fortement
dsquilibre. La phase A est charge 21 KW, la phase B, 2,6 KW et la phase C, 8,8
KW. La puissance fournie par le systme hybride durant cette simulation provient des sources
dnergie renouvelable, du gnrateur diesel et des batteries. Ainsi, les sources dnergie
renouvelable produisent 35 KW, le gnrateur diesel, 30,5 KW et le banc de batteries a une
capacit nominale de 230Ah. Le modle de londuleur utilis dans le SEH est bas sur une
structure quatre bras et deux stratgies de commande sont prises en compte, tel que nous
avons indiqu dans le Chapitre III.
Les deux stratgies de commande utilisent deux boucles de rgulation : une boucle externe
pour le rgulation de la tension en sortie du filtre RL et une boucle interne pour la rgulation
du courant circulant dans ce filtre. La rgulation est ralise en utilisant un rfrentiel tournant
dq0 pour la premire stratgie et en utilisant les composantes symtriques dans des
rfrentiels tournants dq pour la deuxime stratgie.
Par la suite, le comportement du SEH sera analys pour ces deux stratgies de commande.
Quelques grandeurs dintrt sont prsentes dans les Figures VI-17 et IV-18. Dans le
cas du SEH bas sur un onduleur commande-dq0, nous constatons que la charge triphase
dsquilibre entrane un courant triphas dsquilibr i
ch
, mais aussi des dsquilibres sur le
courant gnr par le gnrateur diesel i
GD
et sur le courant i
on
qui traverse londuleur (Figure
Chap. IV : Rsultats de simulation
138
IV-17). De plus, ce dernier est non-sinusodal. Une lgre dformation de la forme donde
peut tre remarque aussi pour les courants du gnrateur diesel et pour les courants absorbs
par la charge. Un courant de charge dsquilibre entrane galement un courant i
N
dans le fil
de neutre non nul.
La Figure IV-18 prsente les mmes variables pour le SEH utilisant le deuxime type
de stratgie de commande (commande-dih). Nous constatons que pour les mmes conditions
de dsquilibre, les formes donde des courants sont bien sinusodales. Pour le GD, le courant
est mme quilibr.
En comparant les courants de neutre dans les Figures IV-17 et IV-18, nous constatons
que lamplitude du courant de neutre dans le cas de la commande-dq0 est infrieure
lamplitude du courant de neutre dans le systme utilisant la commande-dih. Pour le systme
utilisant la commande-dq0, le dsquilibre de courant du GD entrane une diminution des
amplitudes des courants dans londuleur, ce qui explique la diffrence entre les amplitudes
des courants de neutre (le courant de neutre est la somme des courants de phase dans
londuleur, voir section III.4.1).
Figure IV-17 : Courants gnrs par les sources, courants de charge et courant
de neutre pour le systme utilisant la commande-dq0
Chap. IV : Rsultats de simulation
139
Figure IV-18 : Courants gnrs par les sources, courants de charge
et courant de neutre pour le systme utilisant la commande-dih
Dans le cas du SEH avec onduleur commande-dih, lamplitude du courant de neutre
durant le dsquilibre a t compare lamplitude du courant de neutre obtenu dans les
mmes conditions de charge, mais avec une source de tension idale. Les rsultats de
simulation sont similaires montrant lefficacit de la commande-dih.
Dans les deux cas, la rversibilit de londuleur permet de stocker le surplus dnergie
produit par le GD dans les batteries. Cela explique lopposition de phase entre les courants
gnrs par le gnrateur diesel et les courants qui traversent londuleur sur les phases moins
charges, B et C.
Pour la commande-dq0, le dsquilibre des courants en sortie du gnrateur diesel
peut tre expliqu en analysant lvolution temporelle de la tension triphase sur le bus CA
(Figure IV-19). En effet, dans cette figure, nous constatons que la charge triphase
dsquilibre entrane une tension triphase dsquilibre. En comparant cette tension celle
obtenue avec la commande-dih (Figure IV-20), nous remarquons aussi un lger dphasage.
Chap. IV : Rsultats de simulation
140
Figure IV-19 : Tension triphase sur le bus CA pour le systme utilisant la commande-dq0
Figure IV-20 : Tension triphase sur le bus CA pour le systme utilisant la commande-dih
Nous faisons appel la dcomposition de la tension selon les composantes
symtriques de Fortescue pour quantifier le phnomne de dsquilibre (voir section III.3.1).
Ainsi, le degr de dsquilibre inverse a une valeur denviron 11% dans le cas du systme
Chap. IV : Rsultats de simulation
141
utilisant la commande-dq0 et il est infrieur 1% dans le cas du systme utilisant la
commande-dih.
Rappelons quil est gnralement convenu que pour un dsquilibre infrieur 2%,
aucun problme ne doit survenir.
Comme nous avons prcis dans le Chapitre I, les consquences des dsquilibres sont
laugmentation de lchauffement des machines tournantes CA, lexistence de couple
inverse et conduisent la dgradation prmature des machines. Par exemple, une variation
de 10 % de lamplitude de la tension se traduira par une perte de couple de 19 % pour une
machine asynchrone [36].
Les Figures IV-21 et IV-22 prsentent quelques grandeurs internes de la
commande-dq0 et -dih respectivement. Le but est danalyser et dexpliquer pourquoi la
commande-dq0 narrive pas garder quilibre la tension la sortie du filtre, en prsence
dune charge dsquilibre, et de bien expliquer le fonctionnement de la commande base sur
les composantes symtriques.
Rappelons que les tensions ou les courants de phase dsquilibrs peuvent tre
dcomposs en utilisant les composants symtriques dans trois systmes de squence directe,
inverse et homopolaire. Dans le rfrentiel fixe ABC, les systmes de squence inverse et
homopolaire sont des perturbations superposes sur le systme fondamental. En transformant
le systme fondamental dsquilibr ABC en coordonnes dq0, la squence inverse se
retrouve sur les coordonnes dq une frquence 2 (=2f, f est la frquence du rseau).
Ceci sexplique par le fait que le systme de rfrence dq de la squence inverse tourne dans
le sens contraire au systme de rfrence dq de la squence directe. La perturbation introduite
par la squence homopolaire apparat dans la variable 0 la frquence , parce que laxe-0
est stationnaire.
La boucle externe de rgulation de la tension V
ch
a pour but de fixer lamplitude et la
phase de la tension la sortie du filtre. Les sorties de ces rgulateurs sont les rfrences de
courant pour la boucle de rgulation interne (voir section III.5.1).
Chap. IV : Rsultats de simulation
142
Figure IV-21 : Composantes de la tension de sortie du filtre V
ch
dans le rfrentiel tournant dq0.
Figure IV-22 : Composantes symtriques de la tension V
ch
dans le rfrentiel tournant dq.
(a) squence directe, (b) squence inverse, (c) squence homopolaire
(a)
(b)
(c)
Chap. IV : Rsultats de simulation
143
Dans le cas de la commande-dq0, Figure IV-21, nous remarquons la prsence doscillations
la frquence 2 pour les composantes d et q de la tension et la frquence pour la
composante 0. Ces oscillations sont causes par la prsence de la squence inverse superpose
sur le signal dorigine (voir section III.2.2). Leurs amplitudes sont de quelques dizaines de
volts.
La Figure IV-22 illustre quelques grandeurs internes de la stratgie de commande
dih. Comme montr dans le Chapitre III, cette stratgie de commande est base sur la
dcomposition en composantes symtriques de la tension et du courant triphass. Le grand
avantage de cette commande est sa capacit de contrler sparment la squence directe, la
squence inverse et la squence homopolaire. Ces affirmations sont confirmes par les
rsultats prsents dans la Figure IV-22. Nous constatons que la tension de squence directe
peut tre transforme en grandeurs continues v
d,d
et v
d,q
, en utilisant un rfrentiel tournant
dans le sens anti-horaire. Ces grandeurs sont ensuite contrles par des rgulateurs PI. De la
mme faon, la tension de squence inverse, qui nest pas nulle cause de la charge
dsquilibre, est transforme en grandeurs continues v
i,d
et v
i,q
, par une projection un
rfrentiel tournant dans la direction oppose (sens horaire). Deux rgulateurs PI sont utiliss
pour contrler les composantes continues de la tension inverse.
Le mme changement de rfrentiel et la mme rgulation sont appliqus la tension de
squence homopolaire, mais cette fois, aprs avoir dphas les trois vecteurs superposs
lorigine (voir sous-chapitre III.5.2.4). Comme le montre la Figure IV-22, les composantes
symtriques de la tension en coordonnes dq suivent fidlement les rfrences fixes.
Les Figures IV-23 et IV-24, prsentent les grandeurs contrles par la boucle de
rglage interne.
Pour le cas de la commande-dq0 (Figure IV-23), nous constatons que les composantes
d et q du courant i
on
dans la boucle interne de rgulation suivent les consignes donnes par la
boucle externe de rgulation de la tension avec un lger retard (Figure IV-21). Les consignes
oscillent la frquence 2. Lerreur statique existante entrane aussi un dphasage entre la
consigne et le signal rel. La Figure IV-23 montre aussi le courant i
0
et sa consigne. Ils
oscillent la frquence et lerreur statique est presque nulle.
Chap. IV : Rsultats de simulation
144
Figure IV- 23: Courants dans londuleur dans le rfrentiel dq0
Figure IV-24 : Composantes symtriques du courants dans londuleur dans le rfrentiel dq.
(a) squence directe, (b) squence inverse, (c) squence homopolaire
(a)
(b)
(c)
Chap. IV : Rsultats de simulation
145
Dans le cas de la commande-dih, de mme que la boucle externe, la boucle interne
utilise les composantes symtriques pour raliser la rgulation du courant la sortie de
londuleur (Figure IV-24). En effet, les mmes changements de rfrentiel sont appliqus
pour transformer les squences directe, inverse et homopolaire en coordonnes dq. Une fois
ces grandeurs transformes en grandeurs continues, ces dernires sont contrles par des PI
pour les composantes d et q de chaque squence. Comme nous pouvons le remarquer dans la
Figure IV- 24, le courant dans londuleur mesur dans le rfrentiel dq suit bien les
rfrences, en pointilles, pour les trois squences.
Pour vrifier la stabilit du bus CC, juste pour cette simulation, nous avons
reconnect le systme de stockage et le systme de rgulation de la tension sur le bus CC.
Les Figures VI-25(a)(b) comparent le comportement de la tension dans le bus CC pour les
deux commandes. Nous remarquons dans les deux cas, la prsence doscillations la
frquence 2 autour de la tension de rfrence en pointill. La cause de ces oscillations est
linfluence du courant de neutre sur le bus CC (voir section III. 4.1). La diffrence
damplitude entre les oscillations est denviron 1 V, ce qui est logique, vu la diffrence
damplitude entre les courants de neutre.
Figure IV-25 : Tension du bus CC en rgime dsquilibr. (a) commnde-dq0, (b) commande-dih
IV.3.2 Rgime transitoire
Une deuxime simulation est ralise pour tudier leffet des dsquilibres transitoires.
Pour cet essai, la phase A de la charge triphase rsistive, initialement quilibre, passe dune
valeur de puissance de 17,6 KW 2,6 KW et vice-versa en 100 ms.
(a) (b)
Chap. IV : Rsultats de simulation
146
Les Figures IV-26 et IV-27 illustrent les variations de lamplitude des courants gnrs par
londuleur et le gnrateur diesel, du courant consomm par la charge et du courant de neutre.
Figure IV-26 : Courants gnrs par les sources, courants de charge et courant de neutre
durant un dsquilibre transitoire (commande-dq0)
Figure IV-27 : Courants gnrs par les sources, courants de charge et courant de neutre
durant un dsquilibre transitoire (commande-dih)
Chap. IV : Rsultats de simulation
147
Toutes les sources gnrent un courant triphas bien quilibr, jusquau moment o la
puissance consomme par la phase A de la charge rsistive chute 2,6 KW, en t=1 s. Ce
courant est absorb en totalit par la charge et le courant de neutre est nul. Dans le cas de la
commande-dq0 (Figure IV-26), les courants gnrs par le gnrateur diesel, par londuleur et
les courants absorbs par la charge triphase deviennent dsquilibrs partir de t=1 s.
Pendant la dure du dsquilibre, il existe aussi un courant non nul dans le fil de neutre, qui
relie la charge au milieu du quatrime bras du convertisseur.
Les mmes signaux ont t analyss pour le cas de la commande-dih (Figure IV-27).
Nous constatons que les courants absorbs sur les phases ayant la mme charge sont
quilibrs. A chaque changement de rgime de fonctionnement, un lger dsquilibre peut
tout de mme tre observ sur les courants du gnrateur diesel et de londuleur.
Dans la Figure IV-27 nous remarquons galement que lamplitude du courant dans le
fil de neutre est plus importante que dans le cas de la commande-dq0.
Les Figures IV-28 et IV-29 prsentent une comparaison des tensions obtenues avec les
deux types de commande, dans le point de couplage entre la charge, londuleur et le
gnrateur diesel.
Dans le cas de la commande-dq0 (Figure IV-27), nous constatons que le dsquilibre
introduit par la phase moins charge entrane un dsquilibre de tension sur toutes les phases.
Au contraire, la commande-dih arrive bien contrler la tension dans ce mme point.
Les diffrences entre les deux systmes de commande sont analyses en observant les
rponses de la boucle externe de rgulation de la tension et celles de la boucle interne de
rgulation du courant.
Les Figures IV-30 IV-31 montrent les variations des composantes dq0 de la tension
et, respectivement, des composantes symtriques de la tension dans le rfrentiel dq, pendant
les priodes transitoires. Nous remarquons, pour tous les signaux de tension, la prsence de
surtensions transitoires chaque changement de rgime. Ces surtensions transitoires
apparaissent suite aux variations soudaines de la charge de la phase A correspondante une
puissance de 15 kW.
Chap. IV : Rsultats de simulation
148
Figure IV-28 : Tension triphase sur le bus CA durant un dsquilibre transitoire (commande-dq0)
Figure IV-29 : Tension triphase sur le bus CA durant un dsquilibre transitoire ( commande-dih)
Dans le cas de la commande-dih, nous remarquons la prsence de deux surtensions
transitoires (Figure IV-31) pour chaque changement de rgime. La cause de ces surtensions
transitoires est le retard utilis dans le systme de commande pour la dcomposition du
systme triphas dorigine en composantes symtriques (voir section III.5.2.1).
Chap. IV : Rsultats de simulation
149
Figure IV-30 : Tension dans le rfrentiel tournants dq0
Figure IV-31 : Composantes symtriques de la tension en rfrentiel tournant dq.
(a) squence directe, (b) squence inverse, (c) squence homopolaire
(a)
(b)
(c)
Chap. IV : Rsultats de simulation
150
Le comportement du gnrateur diesel durant le rgime transitoire est plus visible sur les
squences symtriques de la tension en coordonnes dq. Comme nous pouvons le constater
dans la Figure IV-31, les transitoires qui apparaissent lors du changement de rgime de
fonctionnement sont accompagns de faibles oscillations qui rallongent le rgime transitoire.
En regardant attentivement, nous remarquons que la boucle externe de la commande-dq0 a
besoin du mme dlai pour arriver au rgime permanent (Figure IV-30).
Les signaux contrls par la boucle de rgulation interne sont reprsents dans les
Figures VI-32 et IV-33. Dans le cas de la commande utilisant les composantes symtriques,
nous retrouvons les effets causs par le retard utilis dans la transformation phasorielle. En
effet, pendant un quart de priode (5 ms), les rfrences de la boucle interne sont celles
calcules au pas antrieur, ce qui explique leurs variations. Une fois ce quart de priode pass,
le courant est nouveau facilement rgul.
Figure IV- 32: Courants dans le rfrentiel dq0
Chap. IV : Rsultats de simulation
151
Figure IV-33 : Composantes symtriques du courants dans le rfrentiel dq.
(a) squence directe, (b) squence inverse, (c) squence homopolaire
(a)
(b)
(c)
Chap. IV : Rsultats de simulation
152
IV.4 Conclusions
La premire partie de ce chapitre a rvl un bon comportement du SEH face aux
variations climatiques. Les systmes de poursuite du point de puissance maximale utiliss par
les sources dnergie renouvelable se sont montrs trs efficaces pendant les variations du
vent et de lclairement. Les mmes variations climatiques ont permis de mettre en vidence
un excellent comportement du systme de rgulation de la tension du bus CC.
La dynamique du bus CC et du bus CA a t analyse aussi par rapport aux variations de
charge triphase de type R et RLE. Ces simulations ont montr que les transitoires entrans
par les variations de charge sont courts et que lamplitude des fluctuations ayant lieu durant
ces transitoires est trs faible. Ces observations ont permis de sparer la partie CC et celle
CA du SEH.
Dans la deuxime partie, nous avons mis en vidence le comportement du SEH en
rgime dsquilibr permanent et transitoire. Les simulations ont t ralises en exploitant le
modle du SEH quip de londuleur quatre bras sur lequel nous avons implment deux
stratgies de commande. La premire stratgie de commande, la commande-dq0, rgule la
tension et le courant la sortie du filtre du convertisseur en coordonnes dq0, pendant que la
deuxime, la commande-dih, rgule les composantes symtriques de la tension et du courant
en coordonnes continues dq. La comparaison des rsultats de simulation montre que dans les
mmes conditions de dsquilibre, les performances de la commande-dih sont nettement
suprieures aux performances de la commande-dq0.
CONCLUSIONS GENERALES ET PERSPECTIVES
Conclusions gnrales et perspectives
155
CONCLUSIONS GENERALES ET PERSPECTIVES
Des amliorations dans la conception et le fonctionnement des SEH sont toujours
ncessaires pour rendre plus comptitive lintgration des sources dnergies alternatives dans
le bilan des systmes globaux de production dnergie. Dans ce contexte, le travail de
recherche prsent dans cette thse est une contribution lanalyse du comportement et la
matrise des performances dun SEH constitu par une olienne, des panneaux
photovoltaques et batteries de stockage.
Dans cette thse, notre dmarche a t dveloppe en trois tapes pour atteindre ces
objectifs:
Une investigation sur le dimensionnement du SEH ;
Ltude des moyens de maximisation de lutilisation des ressources renouvelables ;
Une stratgie damlioration de la qualit de lnergie lectrique gnre.
Aprs un rappel sur les SEH en gnral, leurs architectures et les outils de
dimensionnement, nous nous sommes intresss au SEH du type
Eolien/Photovoltaque/Diesel et Batteries de stockage. Pour maximiser lutilisation des
ressources renouvelables, le dimensionnement et le choix du fonctionnement des composants
ont t raliss en tenant compte de la charge et de la disponibilit des ressources
renouvelables. Ensuite, les modles de simulation pour les sources du SEH, les lments
dinterconnexion et le systme de stockage ont t dvelopps et runis dans une bibliothque
de modles paramtriques sous lenvironnement MATLAB/Simulink.
Chaque composant du SEH tudi inclut une stratgie de commande, dans le but soit de
satisfaire un critre nergtique, soit de permettre de reproduire un comportement dynamique
raliste.
Le module gnrateur olien a t modlis en tenant compte de tous ses
lments : rotor olien, transmission, gnrateur et convertisseur de puissance.
Pour maximiser la rcupration de lnergie contenue dans le vent, la commande adopte pour
la chane de production olienne a t la Commande Indirecte de Vitesse. Cette commande
gnre une rfrence de couple lectromagntique lie la courbe de puissance maximale. La
consigne de couple ainsi obtenue permet dadapter la vitesse de rotation du rotor olien la
Conclusions gnrales et perspectives
156
vitesse du vent, par le biais dun convertisseur commande vectorielle connect au stator de
la machine asynchrone.
Concernant le module gnrateur photovoltaque , le modle polynomial prenant en
compte les variations de lclairement et de la temprature permet de retrouver avec fidlit
les caractristiques courant-tension donnes par les constructeurs de panneaux
photovoltaques.
Le gnrateur photovoltaique a t quip dun systme MPPT qui permet de varier le point
statique de fonctionnement pour que les capteurs photovoltaques puissent dlivrer le
maximum de puissance. Lalgorithme utilis pour la recherche du point de puissance
maximale consiste en lincrmentation de la conductance . Cet algorithme commande un
hacheur survolteur qui adapte la tension aux bornes des panneaux photovoltaques en fonction
des changements dclairement.
La modlisation des composants du systme de stockage dnergie a aussi t ralise.
Un modle batterie simplifi relatif au systme de stockage lectrochimique (batteries
plomb-acide) a t adopt. Le modle, bien que simple, permet danalyser lvolution du
courant dans la batterie, condition cependant de fonctionner sur la zone linaire de la courbe
de charge et de dcharge. Plusieurs modules batterie ont t connects ensemble pour
reflter la ralit du couplage de plusieurs units dans un systme SEH. La charge et la
dcharge des batteries sont contrles travers un hacheur rversible en courant, command
pour fixer la tension sur le bus CC, bus sur lequel sont connects les sources dnergie
renouvelable et londuleur qui permet le couplage aux charges courants alternatifs.
Bien quil fonctionne puissance constante dans notre tude, le gnrateur diesel a t
modlis en tenant compte de tous ses lments (le moteur diesel et son gouverneur de
vitesse, la machine synchrone et le rgulateur de tension), dans la perspective de pouvoir
analyser diffrentes configurations du SEH.
Comme prcis prcdemment, un des objectifs de la thse a t que le SEH gnre
une nergie lectrique de qualit. Parmi les perturbations auxquelles sont sujets les systmes
tels que celui que nous avons tudi, nous avons choisi de traiter les dsquilibres de tension.
Nous nous sommes particulirement intresss aux dsquilibres de tension car ils tiennent
une place importante parmi les problmes rencontrs dans la mise en uvre dun SEH
Conclusions gnrales et perspectives
157
triphas (puissance de court-circuit, faible rpartition non homogne des charges par phase).
En vue de pouvoir analyser et amliorer la qualit de la tension, nous avons dvelopp des
modles capables de rendre compte et de traiter les dsquilibres. Un convertisseur
bidirectionnel quatre bras a t propos comme solution pour quilibrer la tension gnre
par le SEH en conditions de charge dsquilibre. Le quatrime bras permet de traiter le
courant de neutre caus par le dsquilibre.
Des commandes spciales associes cette structure ont t proposes pour amliorer la
qualit de la tension au point de couplage. Deux stratgies de commande ont ainsi t
implmentes sur le modle de simulation de londuleur quatre bras. La premire stratgie
de commande (commande-dq0) assure la rgulation de la tension et du courant mesurs la
sortie du convertisseur dans un rfrentiel tournant dq0. Ce rfrentiel est li la tension aux
bornes de la charge. La deuxime stratgie (commande-dih) est base sur la dcomposition
des systmes triphass de tension et de courant mesurs la sortie du convertisseur en
composantes symtriques directe, inverse et homopolaire. Avec cette stratgie, nous
proposons une dmarche originale permettant datteindre lobjectif dquilibrer la tension aux
bornes de la charge. La commande-dih suppose dabord la reprsentation phasorielle de
chaque grandeur individuelle mesure. Cette reprsentation a permis la dcomposition du
systme triphas dorigine en trois systmes de squence directe, inverse et homopolaire.
Parce que les squences directe et inverse apparaissent comme des composantes continues
dans leur propre rfrentiel tournant, chacune dentre elles est rgule indpendamment par
des rgulateurs PI. Pour pouvoir traiter la squence homopolaire, une solution non
conventionnelle a t propose. Les vecteurs homopolaires initialement superposs ont t
dphass de 120. Dans une approche spcifique, la squence homopolaire a pu ainsi subir les
mmes transformations et a t additionne aux autres squences pour obtenir les signaux de
commande ncessaires la compensation.
Les diffrents modles dvelopps pour chaque constituant du systme ont t ensuite
interconnects afin danalyser le comportement dynamique du SEH complet. La structure
modulaire du SEH permet lintgration de divers composants en fonction de lobjectif de la
simulation.
Des simulations ont permis de tester les performances des stratgies de poursuite du
point de puissance maximale utilises. Elles ont aussi mis en vidence un comportement bien
stable des bus CC et CA, en prsence des variations des sources et des charges triphases
Conclusions gnrales et perspectives
158
quilibres (R et RLE) auxquelles le SEH a t soumis. Le SEH quip de londuleur quatre
bras a galement t test en conditions de charge dsquilibre. Les tests ont t raliss en
rgime de dsquilibre permanent et transitoire. Les rsultats comparatifs ont prouv que dans
les mmes conditions de dsquilibre, les performances de la commande-dih sont nettement
suprieures aux performances de la commande-dq0.
Les rsultats du travail de recherche prsent dans cette thse permettent de dgager
des perspectives immdiates et plus lointaines:
Un premier travail conduisant lexprimentation consistera en limplmentation par
des techniques numriques des commandes tudies. Dans limplmentation physique,
toutes les stratgies de commande seront implmentes dans des processeurs de signal.
La qualit du rsultat de mise en uvre sera dpendante de lefficacit des algorithmes
et des performances en temps rel du systme de commande. Un travail est dj initi
dans ce sens et les premiers rsultats sont prometteurs [90][96].
Intgration dun systme de supervision. Le SEH tudi prsente une structure
complexe et pour une meilleure intgration de toutes les sources interconnectes, il
faut non seulement des systmes de commande individuels, mais aussi un systme
global de supervision.
Tests sur un systme rel. Il sera intressant de tester les performances dynamiques de
toutes les stratgies de commande sur un systme rel. Dans ce but, le SEH tudi
dans cette thse est en train dtre construit lchelle de 1 :100.
REFERENCES BIBLIOGRAPHIQUES
Rfrences bibliographiques
161
REFERENCES BIBLIOGRAPHIQUES
[1] Vaughn C. Nelson, Ken L. Starcher, Robert E. Foster, R. Nolon Clark, Deon
Raubenheimer, Wind hybrid systems technology characterization, West Texas AM
University AEI, New Mexico State University SWTDI, USDA ARS Bushland,
Vista University, May 2002.
[2] J. G. McGowan, J.F. Manwell, Hybrid/PV/Diesel system experiences, Renewable
Energy, 16, 928-933, 1999.
[3] S. Ruin, O. Carlson, Wind-hybrid systems with variable speed and DC-link Wind
Power for the 21 Century, Kassel, Germany, 25-27 September 2000.
[4] E. Ian Baring-Gould, L. Flowers, P. Lundsager, Worldwide status of wind-diesel
applications, Pre-Workshop Wind-Diesel 101, 2004, Anchorage, Alaska.
[5] P. Lundsager, H. Bindner, N. Clausen, S. Frandsen, L. H. Hansen, J. C. Hansen,
Isolated systems with wind power, Ris-R-1256(EN), 2001.
[6] E. Koutroulis, K. Kalaitzakis, N. C. Voulgaris, A hybrid PV-Wind generator system
using a maximum power point tracking technique, Renewable energies for islands,
Chania, Crete Greece, 2001.
[7] T. L. Jensen, Renewable Energy on Small Islands, Forum for Energy and
development (FED), Second Edition Denmark August 2000.
[8] N. Clausen, H. Bindner, S. Frandsen, J. C. Hansen, L. H. Hansen, P. Lundsager,
Isolated systems with wind power, an implementation guideline, Riso National
Laboratory, Roskilde, 2001.
[9] T. Ackermann, L. Sder, An overview of wind energy-status 2002, Renewable and
Sustainable Energy Reviews 6 (2002) 67128, Elsevier Science 2003.
[10] L. H. Hansen, L. Helle, F. Blaabjerg, E. Ritchie, S. Munk-Nilsen, P. Soresen, B. Bak-
Jensen, P. Lundsager, Conceptual survey of generators and power electronics for
wind turbines, Riso National Laboratory, Roskilde, 2001.
[11] J. T. G. Pierik, R. W. Dunlop, W. K. Lee, J. Gabriel, Performance evaluation
methods for autonomous, applications oriented wind turbine systems, Technical
Report ECN-C01-090, 2001.
[12] M. Huart, Guide des nergies renouvelables, Association pour la Promotion des
Energies Renouvelables, Ministre de la Rgion Wallonne diteur, 1994.
[13] J. Muller, R. Desserrires, Conversion photovoltaque, Publi par: Club CRIN,
2002.
Rfrences bibliographiques
162
[14] C. Alonso, J. Alzeu, C. Andrieu, S. Astier, J. Bonal, A. H. Ben, C. Combes, F. Costa,
B. Dakyo, R. Desserrires, J. Fonio, O. Gergaud, C. Glazie, J-C. Muller, B. Multon, C.
Nichita, X. Roboam, P. Rossetti, Llectronique de puissance vecteur doptimisation
pour les nergies renouvelables, ECRIN, ISBN : 2-912154-08-1, Paris, 2002.
[15] J. Schmid, F. Raptis, P. Zacharias, PV Hybrid Plants. State of the Art and Future
Tends, V-Hybrid Power Systems 2000, Aix-en-Provence, Frankreich, 2000.
[16] P. Boulanger, D. Desmettre, Les systmes photovoltaques, Clefs CEA N 44,
2000-2001.
[17] T. Alleau, I. Dumas, La pile combustible une rponse aux proccupations
nergtiques et environnementales, Clefs CEA N 44, 2000-2001.
[18] I. Kamwa, B. Saulier, Modlisation, simulation et rgulation dun rseau
olien/diesel autonome, Raport NIREQ4340, Varennes, Canada, 1989.
[19] I. Cruz, F. Arias, F. Avia, L. M. Arribas, R. P. Fiffe, Assessment of different energy
storage systems for wind energy integration, European Wind Energy Conference
2001.
[20] F. Faure, Suspension magntique pour volant dinertie, Thse soutenue lInstitut
National Polytechnique de Grenoble le 20 juin 2003.
[21] B. Wichert, PV-diesel hybrid energy systems for remote area power generation A
review of current practice and future developments, Renewable and Sustainable
Energy Reviews, 1997, vol. 1, No. 3, pp. 209228, Elsevier Science 1997.
[22] M.Ashari, C. V. Nayar, An optimum dispatch strategy using set points for a
photovoltaic (PV)-diesel-battery hybrid power system, Renewable Energy, vol. 66,
No. 1, pp. 19, Elsevier Science 1999.
[23] M.A. Elhadidy, S.M. Shaahid, Parametric study of hybrid (wind + solar +diesel)
power generating systems, Renewable Energy, vol. 66, No. 1, pp. 129139, Elsevier
Science 2000.
[24] W. Kellogg, M.H. Nehrir, G. Venkataramanan, V. Gerez, Optimal unit sizing for a
hybrid wind/photovoltaic generating system, Electric Power Systems Research, Vol.
39, No. 1, pp. 35-38, 1996
[25] M. Muselli, G. Notton, A. Louche, Design of hybrid-photovoltaic power generator,
with optimization of energy management, Solar Energy, Vol. 65, No. 3, pp. 143
157, Elsevier Science 1999.
[26] L. H. Hansen, P. Lundsager, Review of relevant studies of isolated systems, Ris-R-
1109(EN) 2000.
[27] D. Turcotte, M. Ross, F. Sheriff, Photovoltaic hybrid system sizing and simulation
tools: status and needs, PV Horizon: Workshop on photovoltaic hybrid systems,
Montreal, 2001.
Rfrences bibliographiques
163
[28] H. Bindner, Power control for wind turbines in weak grids: concepts development,
Ris-R-1118(EN) 1999.
[29] S. Drouilhet, M. Shirazi, Wales, Alaska high-penetration wind-diesel hybrid power
system. Theory of operation, NREL/TP-50031755, mai 2002.
[30] H. G. Beyer, T. Degner, Assessing the maximum fuel savings obtainable in simple
wind-diesel systems, Solar Energy, Vol. 61, No. 1, pp. 510, Elsevier Science 1997.
[31] G. Szccomado, J. Svensson, Transient operation of grid-connected voltage source
converter under unbalanced voltage conditions, IEEE Industry Applications
Conference, 36th IAS Annual Meeting, Chicago, 2001.
[32] C. D. Barley and C. B. Winn, Optimal dispatch strategy in remote hybrid power
systems, Solar Energy Vol. 58, No. 4-6, pp. 165-179, 1996
[33] A.Pereira, Modular supervisory controller for hybrid power systems, Ris-R-
1202(EN) 2000.
[34] M. Pipattanasomporn, A study of remote area internet access with embedded power
generation, Etd-12272004-141318, Virginia Polytechnic Institute, 2004.
[35] J. F. Manwell, A. Rogers, G. Hayman, C. T. Avelar, J. G. McGowan, Hybrid2- A
hybrid system simulation model. Theory manual, NREL Subcontract XL-11126-1-1,
1998.
[36] EN 50160, Voltage characteristics of electricity supplied by public distribution
systems, CENELEC, Belgium, 1999.
[37] A. Larsson, Voltage and frequency variation in autonomous grids: a comparison of
two different wind-diesel systems, Proc. of the European Union Wind Energy
Conference, pp. 317-320, Sweden, 1996.
[38] E. Muljadi, McKenna, Power quality issues in a hybrid power system, NREL/CP-
500-30412, 2001.
[39] H. Sharma, S. Islam, T. Pryor, C. V. Nayar, Power quality issues in a wind turbine
driven induction generator and diesel hybrid autonomous grid, Proc. AUPEC 2000.
[40] A. Larsson, The power quality of wind turbines, Thesis, CHALMERS, ISBN91-
7197-970-0, Sweden 2000.
[41] HOMER home page : http://www.nrel.gov/homer/, 2005.
[42] Nichita C., Luca D., Dakyo B., Ceanga E., Large Band Simulation of the Wind Speed
for Real-Time Wind Turbine Simulators, IEEE Transactions on Energy Conversion,
Vol. 17(4), pp. 523- 529, 2002.
Rfrences bibliographiques
164
[43] H. Camblong, Minimisation de lImpact des Perturbations dOrigine Eolienne dans la
Gnration dElectricit par des Arognrateurs Vitesse Variable, Thse de
doctorat, ENSAM Bordeaux, 2003.
[44] Dsir Le Gourires, Energie Eolienne. Thorie, conception et calcul pratique des
installations, deuxime dition, EYROLLES Paris 1982.
[45] D. Spera, editor, Wind Turbine Technology Fundamental Concepts of Wind
Turbine Technology, ASME Press, New York, 1998.
[46] J. Ercolino, Modlisation en rgime nominal et partiel de l'coulement mridien dans
les turbomachines axiales et hlicocentrifuges, Thse Mcanique, Laboratoire
d'Energtique et Mcanique des Fluides Internes, Arts et Mtiers, ENSAM 2002.
[47] S. Heier ; translated by R. Waddington Grid Integration of Wind Energy Conversion
Systems, John Wiley & Sons LTD, 3rd edition 1998.
[48] A. D. Diop, Contribution au Dveloppement dun Simulateur Electromcanique
dArognrateurs : Simulation et Commande en Temps Rel dune Turbine de
Puissance Moyenne Angle de Calage Variable, Thse de Doctorat, Universit du
Havre, 1998.
[49] I. Vechiu, Loptimisation de la rcupration de lnergie olienne. Simulation en
temps rel dune turbine olienne sous lenvironnement Matlab, DEA dElectronique,
Universit du Havre, 2002.
[50] T. Petru, Modelling of Wind Turbines for Power System Studies,Technical report
Chalmers University of Technology, No. 391L, 2001.
[51] S. A. Papathanassiou, N. G. Boulaxis, M. P. Papadopoulos, A Simulation Code for
Power Systems with High Wind Penetration, European Wind Energy Conference
Proceedings, Copenhagen, 2001.
[52] I. Mart, T. S. Nilsen, H. Madsen, A. Roldn, S. Prez, Improving Prediction Models
in Complex Terrain, Global Windpower Conference Proceedings, Paris, 2002.
[53] Y. D. Song, B. Dhinakaran, X. Y. Bao, Variable Speed Control of Wind Turbine
Using Nonlinear and Adaptative Algorithms, Journal of Wind Engineering and
Industrial Aerodynamics, pp. 293-308, 2000.
[54] V. Rogez, Modlisation Simplifie de Sources de Production Dcentralise pour des
Etudes de Dynamique des Rseaux. Application lIntgration dune Production
Eolienne dans un Rseau de Distribution Insulaire, Thse de doctorat, Ecole
Doctorale dArras, Lille, 2004.
[55] R. Pea. R. Cardenas, R. Blasco, G. Asher, J. Claire, A Cage Induction Generator
Using Back to Back PWM Converters for Variable Speed Grid Connected Wind
Energy System, Industrial Electronics Society. IECON '01. The 27th Annual
Conference of the IEEE Volume 2, 29 Nov.-2 Dec. 2001 Page(s):1376 - 1381 vol.2,
2001.
Rfrences bibliographiques
165
[56] A. Kelemen, M. Imecs, Sisteme de Reglare cu Orientare dupa Cmp ale Mainilor de
Curent Alternativ, Editura Academiei, Roumanie, Bucarest, 1989.
[57] T. L. Skvarenina, The Power Electronics Handbook, ISBN:0-6493-7336-0, CRC
Press LLC, Boca Raton, Florida, USA, 2002.
[58] C. M. Ong, Dynamic Simulation of Electric Machinery Using Matlab/Simulink,
Upper Saddle River, Prentice Hall, 1998
[59] H. Camblong, I. M. Alegria, G. Abad, M. Rodriguez, Experimental Trials of
Different Maximum Power Point Tracking Control Strategies of a Variable Speed
Wind Turbine, EPE PEMC 2004 Conference Proceedings, Riga, 2004.
[60] Camblong H., Santos M., Rodriguez M., Logiciel de Simulation dEoliennes Vitesse
Variable, rapport de SIMEOLE, Fonds Communs de Coopration Aquitaine-Euskadi,
2002.
[61] J. Sun and H. Grotstollen, Averaged modelling of switching power converters:
Reformulation and theoretical basis, IEEE PESC92, 11661172, 1992.
[62] B. Robyns, Y. Pankow, L. Leclercq, B. Franois, Equivalent Continuous Dynamic
Model of Renewable Energy Systems, ELECTRIMACS 2002, Montreal, Canada,
CD-ROM, 2002.
[63] R. S. Pena, R. J. Cardenas, G. M. Asher, J. C. Claire, Vector Controlled Induction
Machines for Stand-Alone Wind Energy Applications, Proceedings of the IEEE
Industry Application Annual Meeting, IAS-2000, Rome, 2000.
[64] I. Vechiu, H. Camblong, G. Tapia, B. Dakyo, C. Nichita, Dynamic Simulation Model
of a Hybrid Power System: Performance Analysis, Wind Energy Conference,
London, England, 2004.
[65] A. Hoque, K. A. Wahid, New Mathematical Model of a Photovoltaic Generator,
Journal of Electrical Engineering, vol. EE 28, No. 1, June 2000.
[66] A. D. Hansen. P. Srensen, L. H. Hansen, H. Bindner, Models for Stand-Alone PV
System, Ris-R-1219(EN)/SEC-R-12, 2000.
[67] G. Walker, Evaluating MPPT Converter Topologies Using a Matlab PV Model,
Journal of Electrical & Electronics Engineering, Australia, IEAust, vol.21, No. 1,
pp.49-56, 2001.
[68] A. WAGNER, Peak-Power and Internal Series Resistance Measurement under
Natural Ambient Conditions, Proceedings EuroSun 2000, Copenhagen 2000.
[69] D. P. Hohm, M. E. Ropp, Comparative Study of Maximum Power Point Tracking
Algorithms, Progress in Photovoltaics, vol 11, p. 47-62, January 2003.
Rfrences bibliographiques
166
[70] G. J. Yu, Y. S. Jung, J. Y. Choi, G. S. Kim, A Novel two-mode MPPT Control
Algorithm Based on Comparative study of existing algorithms, Solar Energy,
Volume 76, Issue 4, Pages 455-463, Avril 2004.
[71] F. M. Ishengoma, L. E. Norum, Implementation of a Digitally Controlled Stand-
Alone Photovoltaic Power Supply, NORPPIE 2002, Nordic Workshop on Power and
Idustrial Electronics, 2002.
[72] D. Devilliers, E. Mah, Cellules lectrochimiques: aspects thermodynamiques et
cintiques, Lactualit chimique, janvier 2003.
[73] F. Delfosse, Dtermination de lEtat de Charge des Batteries dun Vhicule
Electrique, Travail de fin dtudes, Universit de Lige, 1998.
[74] M. Thele, S. Buller, D. U. Sauer, R. W. De Donkcker, E. Karden, Hybrid Modelling
of Lead-Acid Batteries in Frequency and Time Domain, Journal of Power Sources,
Vol. 144, Pages 461-466, 2005.
[75] A. Jossen, J. Garche, H. Doering, M. Goetz, W. Knaupp, L. Joerissen, Hybrid
systems with leadacid battery and proton-exchange membrane fuel cell, Journal of
Power Sources, Vol. 144, pp. 395-401, 2005.
[75] M. Lavabre, Electronique de Puissance Conversion de lEnergie, Edition Casteilla,
1998.
[76] M. S. M. Malinowski, Sensorless Control Strategies for Three- Phase PWM
Rectifiers, Ph. D. Thesis, Warsaw University of Technology, 2001.
[78] M. P. Kazmierkowski, R. Krishnan, F. Blaabjerg, Control in Power Electronics
Selected Problems, Elsevier Science, 2002.
[79] H. Song, K. Nam, Dual Current Control Scheme for PWM Converter under
Unbalanced Input Voltage Condition, IEEE Trans. on Industrial Electronics, Vol. 46,
No. 5, 1999.
[80] V. M. Pereira, J. A. P. Pomilio, P. A. V. Ferreira, Experimental Setup for
Autonomous Induction Induction Generator System with Voltage and Frequency
Regulation Studies, Conference on the Computation of Electromagnetic Fields -
COMPUMAG2003, CD-ROM, New York USA, 2003.
[81] S. A. Papathanassiou, M. P. Papadopoulos, Dynamics Characteristics of Autonomous
Wind-Diesel Systems, Renewable Energy, Vol. 23, Pag. 293-311, 2001.
[82] F. Jurado, J. R. Saenz, Neuro-Fuzzy Control for Autonomous Wind-Diesel Systems
Using Biomass, Renewable Energy, Vol. 27, pp 39-56, 2002.
[83] T. Tuken, R. R. Fullmer, J. VanGerpen, Modelling, Identification, and Torque
Control of a Diesel Engine for Transient Test Cycles, SAE SP, no.819, Detroit, 1990.
Rfrences bibliographiques
167
[84] MATLAB/Simulink.www.mathworks.com/access/helpdesk/help/toolbox/physmod/
powersys/simplifiedsynchronousmachine.html, 2005.
[85] G. Saccomando, J. Svensson, Transient Operation of Grid-connected Voltage Source
Converter Under Unbalanced Voltage Conditions, IEEE Industry Applications
Conference, 36th IAS Annual Meeting, Chicago, Il. USA, 2001.
[86] S. El-Barbari, W. Hofmann, Disturbance Observer and State Predictor Based Digital
Control of a Three Phase 4 Wire PWM Inverter for PV Application, PCIM POWER
CONVERSION 99 Nrnberg, proceedings pp. 593-598, 1999.
[87] C.L. Fortescue, Method of Symmetrical Coordinates Applied to the Solution of
Polyphase Networks, A.I.E.E. Transactions, V.37 Part II, pp. 1027-1140, 1918.
[88] R. Zhang, High Performance Power Converter Systems for Nonlinear and
Unbalanced Load/Source, Dissertation, Virginia Polytechnic Institute and State
University, 1998.
[89] S. El-Barbari, W. Hofmann, Digital Control of Four Leg Inverter for Standalone
Photovoltaic Systems with Unbalanced Load, Industrial Electronics Society, 2000.
IECON 2000. 26th Annual Confjerence of the IEEE Volume 1, 22-28 Oct. 2000
Page(s):729 - 734 vol.1
[90] O. Curea, I. Vechiu, H. Camblong, B. Dakyo, Implementation of a DSP Controlled
for a Hybrid Power System (accepted for publication), PELINCEC 2005 Conference,
Poland, 2005.
[91] R. A. Gannett, Control Strategies for High Power Four-Leg Voltage Source
Inverters Master's Thesis, Virginia Polytechnic Institute and State University, etd-
07302001-133659, 2001.
[92] M.C. Benhabib, S. Saadate, New Control Approach for Four-Wire Active Power
Filter Based an the Use of Synchronous Reference Frame Electric Power Systems
Research, Volume 73, Issue 3, Pages 353-362 March, 2005.
[93] I. Vechiu, H. Camblong, Member, IEEE, O. Curea, B. Dakyo, G. Tapia Performance
Analysis of Four-Leg VSC under Unbalanced Load Conditions for Hybrid Power
System Application PELINCEC Conference, Warsaw, 2005.
[94] I. Vechiu, H. Camblong, G. Tapia, B. Dakyo, O. Curea, Modelling and Control of
Four-Wire Voltage Source Inverter Under Unbalanced Voltage Condition for Hybrid
Power System Applications EPE Conference, CD-ROM, Dresden, 2005.
[95] F. Bottern, H. Pinheiro, H. A. Grndling, J. R. Pinheiro, H. L. HeyDigital, Voltage
and Current Controllers for Three-Phase PWM Inverter for UPS Applications,
Industry Applications Conference, vol. 4, pp:2667 2674, 2001.
[96] O. Curea, I. Vechiu, D. Marin, H. Camblong, B. Dakyo. Small-Scale Test Bench of a
Hybrid Power System, EPE 2005, CD-ROM, Dresden, Germany, 2005.
ANNEXES
ANNEXE A. Rapport de dimensionnement du SEH
171
ANNEXE A. Rapport de dimensionnement du SEH
Configurations du SEH en fonction du cot net actuel
Cas dtude
Charge, valeur moyenne: 575 kWh/d
Eclairement, valeur moyenne: 4,8 kWh/m2/d
Vitesse du vent, valeur moyenne: 7 m/s
30kW Diesel Prix du carburant: 0,8 $/L
Architecture du systme
PV: 18 kW
Eolienne: 1 *G 22kW
30kW Diesel: 30 kW
Batteries: 40 Trojan T-105
Onduleur: 75 kW
Redresseur: 75 kW
Stratgie de fonctionnement: Cycle Charging
ANNEXE A. Rapport de dimensionnement du SEH
172
Bilan de cot
Cot net actuel: 768.716 $
Cot moyen unitaire annuel: 0,287 $/kWh
Ventilation des frais
Capital
Initial
Capital
Annualis
Cot de
remplacement
annuel
Fonctionnement
& maintenance
annuelle
Consommation
de carburant
annuelle
Cot total
annualis Composant
($) ($/an) ($/an) ($/an) ($/an) ($/an)
18kW PV 99.000 7.744 0 0 0 7.744
G 22kW 55.000 4.302 0 1.500 0 5.802
30kW Diesel 15.000 1.173 1.576 3.968 28.570 35.287
Batteries 5.200 407 3.660 160 0 4.226
Convertisseur 67.500 5.280 1.793 0 0 7.073
Total 241.700 18.907 7.029 5.628 28.570 60.134
Production dnergie lectrique annuelle
Consommation dnergie lectrique annuelle
Consumation Fraction
Charge
(kWh/yr)
Charge CA 209.871 100%
Total 209.871 100%
Production Fraction
Composant
(kWh/yr)
Surface PV 30.991 12%
Eolienne 98.016 40%
30kW Diesel 119.040 48%
Total 248.046 100%
Variable Valeur Unit
Fraction Renouvelable: 0,520
Excs dnergie: 38,176 kWh/an
Charge non satisfait. 4 kWh/an
ANNEXE A. Rapport de dimensionnement du SEH
173
PV
Variable Valeur Unit
Puissance moyenne: 84,9 kWh/j
Puissance minimale: 0,0001936 kW
Puissance maximale: 20,5 kW
Pntration PV: 14,77 %
Facteur de capacit: 19,65 %
Heures de fonctionnement: 4,732 h/an
Eolienne: G 22kW
Variable Valeur Unit
Capacit totale: 25,0 kW
Puissance moyenne: 11,19 kW
Puissance minimale: 0,0573 kW
Puissance maximale: 25,0 kW
Pntration olienne: 46,7 %
Facteur de capacit: 44,8 %
Heures de fonctionnement: 8,760 h/an
ANNEXE A. Rapport de dimensionnement du SEH
174
30kW Diesel
Variable Valeur Unit
Heures de fonctionnement: 3.968 h/an
Nombre de dmarrages: 1.590 dmarrages/h
Dure de vie: 5,04 h
Puissance moyenne: 30,0 kW
Puissance minimale: 30,0 kW
Puissance maximale: 30,0 kW
Carburant utilis annuellement: 35.712 L/an
Utilisation spcifique du carburant: 0,300 L/kWh
Rendement lectrique moyen: 33,9 %
Batteries
Variable Valeur Unit
Capacit totale des batteries 27.236 kWh/an
Dure de vie des batteries 1,241 an
Autonomie des batteries 1,578 heures
ANNEXE A. Rapport de dimensionnement du SEH
175
Emissions
Polluant Emissions (kg/an)
Dioxyde de carbone: 94.041
Monoxyde de carbone: 232
Hydrocarbure non brl: 25,7
Particule: 17,5
Dioxyde soufre: 188,9
Oxydes de Nitrogne: 2.071
ANNEXE B. Paramtres des composants du SEH
177
ANNEXE B. Paramtres des composants du SEH
B.1 Eolienne de 22 kW
Paramtres du rotor olien
Valeurs Nominales Valeur Unit
Puissance P
n
22 kW
Rayon R
4,54 m
Vitesse de rotation N
t
138,65 rpm
Rapport de multiplication N 10,38
Rendement de la conversion 1
Valeurs nominales de la machine asynchrone
Valeurs Nominales Valeur Unit
Tension (Y) V
n
380 V
Courant I
n
44 A
Frequence f
n
50 Hz
Vitesse de rotation N
n
1440 rpm
Puissance P
n
22 kW
Couple T
n
145 Nm
Facteur de puissance 0,89
Paramtres de la machine asynchrone
Paramtre Valeur Unit
Rsistance du stator R
s
0,115
Rsistance du rotor R
r
0,184
inductance de fuite du stator L
s
1,65 mH
Inductance de fuite du rotor L
r
1,68 mH
Resistence de
magnetissation
R
m
224
Inductance de
magnetisation
L
m
46,6 mH
Inertie J 0,334 kgm
2
ANNEXE B. Paramtres des composants du SEH
178
B.2 Panneau PV (Shell SQ75)
Caractristiques lectriques en conditions standard de test (Eclairement 1000 W/m
2
et
temprature de la cellule 25C)
Paramtre Valeur Unit
Puissance nominale P
n
75 W
Puissance nominale MPPT P
mppt
75 W
Tension vide
V
tv
21.7 V
Courant de court circuit I
tv
4.8 A
Spcifications mcaniques du panneau PV Caractristiques I-V de la cellule
ANNEXE B. Paramtres des composants du SEH
179
B.3 Gnrateur diesel 30 Kw
Valeurs nominales de la machine synchrone
Valeurs Nominales Valeur Unit
Puissance S
n
33 kWA
Tension (Y) V
n
380 V
Courant I
n
50 A
Frequence f
n
50 Hz
Vitesse de rotation N
n
1500 rpm
cos
0.8
Inductif
Paramtres de la machine synchrone
Paramtre Valeur Unit
Ractance synchrone X
s 3,51
Rsistance R
s 0,04
B.4 Convertisseur bidirectionnel
Paramtres du convertisseur bidirectionnel
Paramtre Valeur Unit
Tension dentre
700 V
CC
Tension de sortie
(v
aN
, v
bN
, v
cN
)
230
V
ef
Frequence 50 Hz
Entre/Sortie
Puissance triphase 75 kW
Inductance (L
f
, L
N
) 3 mH
Composants du
filtre
Rsistance (R
f
, R
N
)
0,1
B.5 Batterie Dryfit A500
Paramtres de la batterie Dryfit A500
Valeurs Nominales Valeur Unit
Capacit nominale C
n20C
115 Ah
Tension V
n
12 V
Charge maximale I
n20C
770 A
ANNEXE C. Calcul de lexpression du coefficient de couple dune olienne
181
ANNEXE C. Calcul de lexpression du coefficient de couple dune
olienne
La modlisation du rotor olien exige la connaissance de lexpression C
t
() dpendant
des caractristiques gomtriques et du profil des pales. Cette expression peut tre obtenue
partir de mesures en soufflerie ou par calcul numrique en utilisant la thorie de llment de
pale [1]. Cette thorie permet de modliser les forces qui entranent le mouvement de rotation
du rotor olien. Deux forces sont gnralement utilises pour dcrire le comportement
arodynamique dun profil de pale compris entre les distances r et r+dr et situ dans un vent
relatif de vitesse V
r
(Figure C-1) : la force de portance dF
z
perpendiculaire la direction de V
r
et la force de trane dF
x
parallle la direction de V
r
.
dF
t
dF
a
dF
t
dF
z
dF
x
r
r
V
v
V
r
t
Axe du rotor
l
R
m
r
t
dr
r
Figure C-1: Arodynamique de la pale
Les forces de portance et de trane ont les expressions suivantes :
dr l V C dF
r z z
2
2
1
= Eq. C-1
ANNEXE C. Calcul de lexpression du coefficient de couple dune olienne
182
dr l V C dF
r x x
2
2
1
= Eq. C-2
o l est la longueur de corde du profil et C
z
, C
x
sont les coefficients de portance et trane
respectivement. La variation de C
z
et C
x
en fonction de langle dincidence pour un profil
NACA 2315 est prsente dans la Figure C-2 [4].
Figure C-2: Variation des coefficients de portance et de trane pour un profil de pale donn
La contribution des lments des pales de lolienne situs entre les distances r et r+dr
peut tre value par la pousse axiale et le couple moteur. Leurs expressions sont :
( ) ( ) ( ) ( ) ( ) ( ) ( )dr C C l V dF dF dF
x z r x z a
+ = + = sin cos
2
1
sin cos
2
Eq. C-3
( ) ( ) ( ) ( ) ( ) ( ) ( )dr C C l V dF dF dF
x z r x z t
+ = + = cos sin
2
1
cos sin
2
Eq. C-4
La somme des intgrales sur toutes les pales, des composantes horizontales et
verticales des forces de portances et de trane permet le calcul de la force de pousse axiale
et du couple arodynamique :
( )dr r dF F
p
m
N
k
R
R
a a
=
=1
Eq. C-5
( )dr r rdF T
p
m
N
k
R
R
t t
=
=1
Eq. C-6
o N
p
est le nombre de pales, R est le rayon du rotor olien et R
m
est la distance du centre du
moyeu au coin de la pale ct moyeu.
ANNEXE C. Calcul de lexpression du coefficient de couple dune olienne
183
Ainsi, en galant lexpression du couple obtenue partir du thorme du disque actuateur (Eq.
II-3) lexpression du couple obtenue partir du thorme de llment de pale (Eq. C-6), on
retrouve lexpression du coefficient de couple :
( ) ( ) ( ) ( ) ( )dr C C V l r
V R
C
x z
N
k
R
R
r
v
t
p
m
+
=
=
cos sin
1
1
2
2 3
Eq. C-7
La vitesse relative V
r
peut sexprimer en fonction de la vitesse du vent V
v
et de la
vitesse spcifique :
+ =
+ = + =
2
2
2
2 2 2
1 1
R
r
V
RV
Rr
V r V V
v
v
t
v t v r
Eq. C-8
Langle dincidence peut galement sexprimer en fonction de la vitesse spcifique :
( )
2 2
1 1
cos
+
=
=
R
r
R
r
R
r
R V
Rr
V
r
t t
v
t
v
t
Eq. C-9
( )
2
1
1
sin
+
= =
R
r
V
V
t
r
v
Eq. C-10
=
r
R
arctg Eq. C-11
Ainsi, pour des valeur de et fixes, on peut retrouver les courbes des coefficients
de couple et de puissance illustrant les caractristiques gomtriques dun rotor olien [4].
Dans la Figure C-3, sont montres les courbes des coefficients de couple et de puissance pour
un rotor trois pales, angle de calage fixe et avec un diamtre de 9 m. Le profil de pale a t
approch en utilisant les coefficients de portance et de trane prsents dans la Figure C-2.
ANNEXE C. Calcul de lexpression du coefficient de couple dune olienne
184
Figure C-3 : Courbes des coefficients de puissance et de couple
ANNEXE D. Transformations de Clarke et de Park
185
ANNEXE D. Transformations de Clarke et de Park
Tout systme triphas, X
a
, X
b
, X
c
, (X - tension ou courant) peut tre reprsent par un
vecteur tournant en coordonnes , et 0 dans un plan tridimensionnel orthogonal. La
transformation du systme triphas dans ces coordonnes orthogonales, parfois appele la
transforme de Clarke, est exprime par :
[ ] [ ]
T
c b a
T
X X X T X X X
0 0
= Eq. D-1
o
=
2
1
2
1
2
1
2
3
2
3
0
2
1
2
1
1
3
2
0
T Eq. D-2
Avec la matrice T
0
ainsi dfinie, les amplitudes sont conserves. En utilisant la
place du facteur 2/3 et de 1/2, les racines carres de ceux-ci, la matrice devient orthonorme et
les puissances sont conserves.
La transformation inverse est donne par lquation Eq. D-3 :
[ ] [ ]
T T
c b a
X X X T X X X
0
1
0
= Eq. D-3
o
1
2
3
2
1
1
2
3
2
1
1 0 1
1
0
T Eq. D-4
Quand le systme triphas est quilibr, la composante 0 est nulle et le vecteur tourne
dans un plan - la vitesse . La trajectoire du vecteur est un cercle. Le mouvement de
ANNEXE D. Transformations de Clarke et de Park
186
rotation reprsente la nature variable du systme avec le temps. En reprsentant le systme en
coordonnes dq tournant la vitesse (Figure D-1), le vecteur devient invariant avec le
temps. La transformation des coordonnes 0 en dq0 (transformation de Park) est donne
par lquation Eq. D-5 :
[ ] [ ]
T
dq
T
q d
X X X T X X X
0 0 0
= Eq. D-5
o la matrice T
dq0
est exprime par :
( ) ( )
( ) ( )
=
1 0 0
0 cos sin
0 sin cos
0
t t
t t
T
dq
Eq. D-6
La transformation inverse est donne par lquation Eq. D-7 :
[ ] [ ]
T
q d dq
T
X X X T X X X
0
1
0 0
=
Eq. D-7
o la matrice T
-1
dq0
a lexpression :
( ) ( )
( ) ( )
1 0 0
0 cos sin
0 sin cos
1
0
t t
t t
T
dq
Eq. D-8
0
d
q
Figure D-1 : Relation entre les rfrentiels 0 et dq0
Les deux transformations Eq. D-1 et Eq. D-5 peuvent tre combines dans une seule
transformation Eq. D-9 :
ANNEXE D. Transformations de Clarke et de Park
187
[ ] [ ]
T
C B A P
T
q d
X X X T X X X =
0
Eq. D-9
o T
P
est la matrice de Parke directe dfinie par :
( )
( )
=
2
1
2
1
2
1
3
4
sin
3
2
sin sin
3
4
cos
3
2
cos cos
3
2
t t t
t t t
T
P
Eq. D-10
La matrice inverse est :
( )
( )
2
1
2
1
2
1
3
4
sin
3
2
sin sin
3
4
cos
3
2
cos cos
3
2
1
t t t
t t t
T
P
Eq. D-11
ANNEXE E. Paramtres des rgulateurs utiliss dans les stratgies de commande
189
ANNEXE E. Paramtres des rgulateurs utiliss dans les
stratgies de commande
E.1 Rgulateurs de la commande vectorielle du gnrateur olien
H
g
d q
K
p
1.635 1.635
K
i
57.5 57.5
E.2 Incrmentation de la conductance
Pas d'incrmentation du rapport cyclique : d=0.01.
E.3 Rgulateurs du bus CC
H
CC
K
p
0.001
K
i
0.3
E.4 Rgulateurs de la commande du convertisseur bidirectionnel (rgime
quilibr)
Boucle interne de courant
H
C
d q
K
p
3 3
K
i
100 100
Boucle externe de tension
ANNEXE E. Paramtres des rgulateurs utiliss dans les stratgies de commande
190
H
V
d q
K
p
0,27 0,27
K
i
2,77 2,77
E.5 Rgulateurs de la commande-dq0
Boucle interne de courant
H
C
d q 0
K
p
3 3 12
K
i
100 100 400
Boucle externe de tension
H
V
d q 0
K
p
0,27 0,27 0,27
K
i
2,77 2,77 2,77
E.6 Rgulateurs de la commande-dih
Boucle interne de courant
H
d
H
i
H
h
d q d q d q
K
p
3 3 3 3 12 12
K
i
100 100 100 100 400 400
Boucle externe de tension
ANNEXE E. Paramtres des rgulateurs utiliss dans les stratgies de commande
191
H
d
H
i
H
h
d q d q d q
K
p
0,27 0,27 0,27 0,27 0,27 0,27
K
i
2,77 2,77 2,77 2,77 2,77 2,77
ANNEXE F. Composantes symtriques
193
ANNEXE F. Composantes symtriques
F.1 Thorme de Fortescue
La reprsentation en composantes symtriques a t propose par C. L. Fortescue en
1918. Sous sa forme gnrale, le thorme de Fortescue snonce comme suit :
Un ensemble non quilibr de n vecteurs coplanaires, concurrents et de mme nature peut
tre rduit n systmes de vecteurs symtriques.
F.1 Dcomposition en composantes symtriques
Considrons trois grandeurs complexes
A
X ,
B
X et
C
X prises dans cet ordre et
formant un systme dsquilibr. En conformit avec le thorme de Fortescue, le systme
dsquilibr est la somme vectorielle des trois systmes :
h A i A d A A
X X X X
, , ,
+ + = Eq. F-1
h B i B d B B
X X X X
, , ,
+ + = Eq. F-2
h C i C d C C
X X X X
, , ,
+ + = Eq. F-3
Puisquon a une relation bien dfinie entre les vecteurs des diffrents systmes, on
peut reprendre les quations prcdentes et les exprimer laide des seuls vecteurs de la phase
A et de loprateur a.
=
3
2
sin
3
2
cos
j a Eq. F-4
Ainsi :
h A i A d A A
X X X X
, , ,
+ + = Eq. F-5
h A i A d A B
X X a X a X
, , ,
2
+ + = Eq. F-6
h A i A d A C
X X a X a X
, ,
2
,
+ + = Eq. F-7
Si on fait la somme vectorielle de ces trois quations, on obtient :
ANNEXE F. Composantes symtriques
194
( ) ( )
h A i A d A C B A
X X a a X a a X X X
, ,
2
,
2
3 1 1 + + + + + + = + +
Puisque :
0 1
2
= + + a a Eq. F-8
il en dcoule que :
h A C B A
X X X X
,
3 = + + Eq. F-9
Donc :
( )
C B A h A
X X X X + + =
3
1
,
Eq. F-10
Au lieu de faire directement la somme des trois quations, on peut avancer dabord la
phase B de 120 en multipliant tous les termes de la deuxime quation par loprateur a et
retarder la phase C de 120 en multipliant tous les termes de la troisime quation par a
2
. De
cette faon, on obtient :
h A i A d A A
X X X X
, , ,
+ + = Eq. F-11
h A i A d A B
X a X a X X a
, ,
2
,
+ + = Eq. F-12
h A i A d A C
X a X a X X a
,
2
, ,
2
+ + = Eq. F-13
Si on fait la somme de ces trois quations, on constate que les composantes
i A
X
,
et
h A
X
,
sannulent. Il en rsulte que :
( )
C B A d A
X a X a X X
2
,
3
1
+ + = Eq. F-14
Si, cette fois, on retarde la phase B de 120 et quon avance la phase C de 120, on
obtient :
h A i A d A A
X X X X
, , ,
+ + = Eq. F-15
h A i A d A B
X a X X a X a
,
2
, ,
2
+ + = Eq. F-16
ANNEXE F. Composantes symtriques
195
h A i A d A C
X a X X a X a
, , ,
2
+ + = Eq. F-17
Lorsquon fait la somme de ces trois quations, on trouve que ce sont alors les
composantes
d A
X
,
et
h A
X
,
qui sont nulles, do :
( )
C B A i A
X a X a X X + + =
2
,
3
1
Eq. F-18
Si on regroupe les rsultats des trois dveloppements prcdents (Eq. F-10, Eq. F-14,
Eq. F-18) pour bien voir la structure de ces quations, on obtient :
( )
C B A d A
X a X a X X
2
,
3
1
+ + = Eq. F-19
( )
C B A i A
X a X a X X + + =
2
,
3
1
Eq. F-20
( )
C B A h A
X X X X + + =
3
1
,
Eq. F-21
Ces trois relations dmontrent que tout systme dsquilibr, quel quil soit, peut tre
remplac par un arrangement bien dfini de trois systmes de squence.
Les phases B et C des systmes directe, inverse et homopolaire peuvent tre exprimes
en utilisant le mme raisonnement que prcdemment. Sous une forme matricielle, les trois
systmes triphass de squence directe, inverse et homopolaire sont :
[ ]
C
B
A
d
d C
d B
d A
X
X
X
F
X
X
X
,
,
,
Eq. F-22
[ ]
C
B
A
i
i C
i B
i A
X
X
X
F
X
X
X
,
,
,
Eq. F-23
[ ]
C
B
A
h
h C
h B
h A
X
X
X
F
X
X
X
,
,
,
Eq. F-24
o :
ANNEXE F. Composantes symtriques
196
[ ]
=
1
1
1
3
1
2
2
2
a a
a a
a a
F
d
, [ ]
=
1
1
1
3
1
2
2
2
a a
a a
a a
F
i
,[ ]
=
1 1 1
1 1 1
1 1 1
3
1
h
F
TITRE : Modlisation et analyse de l'intgration des nergies renouvelables dans un rseau autonome
Rsum
Dans la plupart des rgions isoles, le gnrateur diesel est la source principale dnergie lectrique. Pour ces
rgions, le prix dextension du rseau lectrique savre prohibitif et le surcot de lapprovisionnement en
combustible augmente radicalement avec lisolement. Dans ce contexte, linterconnexion de plusieurs sources
dnergie renouvelable (des oliennes, des panneaux photovoltaques, des petites centrales hydrolectriques, etc.)
dans un Systme dEnergie Hybride (SEH) peut avoir une incidence profitable sur la production dnergie
lectrique, en termes de cot et de disponibilit.
Cependant, des amliorations dans la conception et le fonctionnement des SEH sont toujours ncessaires pour
rendre cette technologie plus comptitive dans les rgions isoles. Ainsi, le travail de recherche prsent dans
cette thse est une contribution lanalyse du comportement et la matrise des performances dun SEH
constitu par deux sources dnergie renouvelable, un gnrateur diesel et des batteries de stockage. Ce type de
systme est tudi selon trois aspects : dimensionnement, maximisation de lutilisation des ressources
renouvelables et qualit de lnergie lectrique.
Pour maximiser lutilisation des ressources renouvelables, le dimensionnement et le choix du fonctionnement
des composants sont raliss en tenant compte des ressources nergtiques disponibles, ainsi que des contraintes
dutilisation. Ensuite, les modles de simulation pour les sources du SEH, les lments dinterconnexion et le
systme de stockage sont dvelopps et runis dans une bibliothque de modles paramtriques sous
lenvironnement MATLAB/Simulink. Les modles de simulation, suffisamment prcis, sont utiliss de manire
modulaire pour une plus grande flexibilit dans ltude du comportement dynamique du SEH et pour tester
diffrentes stratgies de commande. Cette dmarche permet ainsi de crer des scnarios de conditions de
fonctionnement pour le SEH et de faire varier par la simulation, les sources dnergie et/ou le niveau et le type
de charge. Chaque composant du SEH tudi inclut une stratgie de commande, dans le but soit de satisfaire un
critre nergtique, soit de permettre de reproduire un comportement dynamique raliste.
En vue de pouvoir analyser et amliorer la qualit de la tension, nous avons dvelopp des modles capables de
rendre compte et de traiter les dsquilibres. Un convertisseur bidirectionnel quatre bras est propos comme
solution pour quilibrer la tension gnre en conditions de charge dsquilibre. Des commandes spciales
associes cette structure ont t proposes pour amliorer la qualit de la tension aux bornes de la charge.
Les rsultats obtenus en simulations montrent quavec llectronique de puissance et des stratgies de commande
appropries, il est possible davoir un degr plus lev dintgration des sources dnergie renouvelable et
damliorer la qualit de lnergie gnre par un SEH.
Mots cls : systme dnergie hybride, dimensionnement, simulation, convertisseurs, commande, composantes
symtriques, qualit de lnergie.
TITLE: Modelling and analysis of the renewable energy integration in an autonomous grid
Abstract
In many of the remote areas, the diesel generator is the main source of power supply. The cost of grid extension
is, and will probably continue to be, prohibitive and the fuel cost increases severely with the remoteness of the
location. The combination of several energy sources (wind turbines, photovoltaic panels, small hydroelectric
power plants etc.) in a Hybrid Power System (HPS) can be very attractive for most of the remote areas, in terms
of cost and availability.
However, improvements of the design and operation of the HPS are still needed to make this technology more
competitive in remote areas. In this context, the work presented in this thesis is a contribution to the behaviour
analysis and the performances control of an HPS constituted by two renewable energy sources, a diesel generator
and storage batteries. This kind of system is studied according to three aspects: sizing, maximizing the use of the
renewable resources and power quality.
To maximize the use of renewable resources, the size and operation of the HPS components are matched to the
load and the available renewable resources. Then, simulation models for all components of the HPS are
developed and brought together in a parametric library under MATLAB/Simulink environment. The simulation
models, sufficiently precise, are used in a modular manner for a higher flexibility of the HPS dynamic behaviour
investigation and to test different control strategies. Each source of the system includes a control strategy either
to satisfy an energy criterion or to reproduce a realist dynamic behaviour.
In order to be able to analyze and to improve the voltage quality, simulation models capable of treating
unbalances were developed. A four-leg bi-directional converter is the proposed solution to mitigate the voltage
unbalance. Special control strategies associated to this topology have been proposed to improve the quality of the
output voltage under unbalanced load conditions.
The simulations results show that using power electronics and the suitable control strategies, it is possible to
have a high level integration of renewable energy sources and to improve the power quality of an HPS.
Keywords: hybrid power system, three-phase power system, sizing, simulation, converters, control, symmetrical
component, power quality.
You might also like
- Architecture OrdinateurDocument213 pagesArchitecture OrdinateurNour Eddine Elmoukhtar100% (1)
- Zarkov EF2009 ModelisationDocument9 pagesZarkov EF2009 ModelisationhassenbbNo ratings yet
- Le CompresseurDocument30 pagesLe CompresseurhassenbbNo ratings yet
- Cours Electronique Puissance Ch1Document20 pagesCours Electronique Puissance Ch1arnaud29100% (1)
- Le Guide de L'air Comprimé PDFDocument40 pagesLe Guide de L'air Comprimé PDFTony DjaraNo ratings yet
- Aerodyn Machines Eoliennes PDFDocument28 pagesAerodyn Machines Eoliennes PDFhassenbbNo ratings yet
- Le Guide de L'air Comprimé PDFDocument40 pagesLe Guide de L'air Comprimé PDFTony DjaraNo ratings yet
- Compresseur Niveau4 MaugisDocument28 pagesCompresseur Niveau4 MaugisGhofrane Ben SlamaNo ratings yet
- Le CompresseurDocument30 pagesLe CompresseurhassenbbNo ratings yet
- ModélisetcommandmachasynDocument56 pagesModélisetcommandmachasynmarwitosNo ratings yet
- Adaptation D'impédancesDocument7 pagesAdaptation D'impédanceshassenbbNo ratings yet
- Le Guide de L'air Comprimé PDFDocument40 pagesLe Guide de L'air Comprimé PDFTony DjaraNo ratings yet
- PFE1011Document70 pagesPFE1011Hemza SellamnaNo ratings yet
- COURS Electronique de PuissanceDocument139 pagesCOURS Electronique de Puissancemechergui_nabil92% (74)
- Cours Machine Synchrone TgettDocument22 pagesCours Machine Synchrone TgettJosef PrinceNo ratings yet
- 4 Transistor Bip PDFDocument40 pages4 Transistor Bip PDFotmaneNo ratings yet
- Ing Nassim GuernoudjDocument116 pagesIng Nassim GuernoudjImeneNo ratings yet
- Cours Sur Les TransistorsDocument9 pagesCours Sur Les TransistorsAyoub AbNo ratings yet
- Capitan e AnuDocument225 pagesCapitan e AnuYahia NinoNo ratings yet
- Cours Sur Les AutomatismesDocument1,385 pagesCours Sur Les Automatismesjulien1987100% (6)
- Inj Mazouz FaridaDocument133 pagesInj Mazouz Faridahassenbb100% (1)
- Cours TS UE STI 2012 2013 Distribue PDFDocument184 pagesCours TS UE STI 2012 2013 Distribue PDFAliOuadhaniNo ratings yet
- Cours Sur Les AutomatismesDocument1,385 pagesCours Sur Les Automatismesjulien1987100% (6)
- GRAFCET Point de Vue Partie CommandeDocument3 pagesGRAFCET Point de Vue Partie CommandehassenbbNo ratings yet
- Comment Entretenir Batteries Marine Manuel Francais Entretien BatterieDocument2 pagesComment Entretenir Batteries Marine Manuel Francais Entretien BatteriehassenbbNo ratings yet
- Ghennam Tarak DLE PDFDocument199 pagesGhennam Tarak DLE PDFKaziiLaggounNo ratings yet
- API Automate ProgrammableDocument97 pagesAPI Automate ProgrammableJalal Raougui50% (2)
- Sunny Island 24-09-2014 PDFDocument170 pagesSunny Island 24-09-2014 PDFhassenbbNo ratings yet
- 6 - ElectrocinetiqueDocument11 pages6 - ElectrocinetiquebenyouNo ratings yet
- Bulletin 012 11Document3 pagesBulletin 012 11Domingo BenNo ratings yet
- Exercices Exponentielle CorrigesDocument10 pagesExercices Exponentielle CorrigesYoussef ElalaouiNo ratings yet
- 2-Cours Machine À Courant ContinuDocument28 pages2-Cours Machine À Courant ContinuNírmo NìroNo ratings yet
- Qis 215 - FRDocument12 pagesQis 215 - FRlaurent serbinNo ratings yet
- Présentation Générale Des EoliennesDocument6 pagesPrésentation Générale Des EoliennesMeher Ounissi100% (2)
- Circuit ElectriqueDocument5 pagesCircuit Electriquecharef loumaNo ratings yet
- TFC Déséquilibre TensionDocument119 pagesTFC Déséquilibre Tensionmichee musanshaNo ratings yet
- Micom P342/P343/P344 /P345 & P391: Protections D'alternateurDocument846 pagesMicom P342/P343/P344 /P345 & P391: Protections D'alternateurakebayeriNo ratings yet
- 19-Pro Groupe ElectrogeneDocument25 pages19-Pro Groupe ElectrogeneKeddrick ReynoldsNo ratings yet
- Duogen Documentation TechniqueDocument29 pagesDuogen Documentation TechniquevassindouNo ratings yet
- Memoir Ismail HamitDocument84 pagesMemoir Ismail HamitAbdelilah HilaliNo ratings yet
- CH03 Integration Des Systemes Éioliens 2024Document22 pagesCH03 Integration Des Systemes Éioliens 2024energiesrenouvelables25No ratings yet
- Production de L Energie ElectriqueDocument21 pagesProduction de L Energie ElectriqueOumar MandodjoNo ratings yet
- Exercices Machine Courant Continu2Document13 pagesExercices Machine Courant Continu2aziz rahmouniNo ratings yet
- Methodologie de TravailDocument15 pagesMethodologie de Travailboussaid nejla100% (1)
- TP2 MSDocument5 pagesTP2 MShouda elmoudaneNo ratings yet
- Application Des Aimants Aux Machines ÉlectriquesDocument37 pagesApplication Des Aimants Aux Machines ÉlectriquesBah BrahimNo ratings yet
- Belghit SalimDocument75 pagesBelghit SalimloicNo ratings yet
- DistribuerDocument11 pagesDistribuerMurat BasNo ratings yet
- TD01CV23mars - Generatrice AsynchroneDocument6 pagesTD01CV23mars - Generatrice AsynchronefrNo ratings yet
- Rapport PDFDocument59 pagesRapport PDFselotmani100% (2)
- Chapitre 2 PDFDocument15 pagesChapitre 2 PDFallan hereNo ratings yet
- Manuel D Utilisation CP200DDocument57 pagesManuel D Utilisation CP200DJulian COULETNo ratings yet
- Processus Production BillettesDocument104 pagesProcessus Production BillettesnoureddineNo ratings yet
- 12fee Fonctionnement D Une Eolienne PDFDocument2 pages12fee Fonctionnement D Une Eolienne PDFsaidNo ratings yet
- Ms ELN Boussaid+Morad PDFDocument128 pagesMs ELN Boussaid+Morad PDFmechtoub sofianeNo ratings yet
- Etude Expérimentale Des Propriétés de Fonctionnement D'un Moteur Asynchrone À Cage D'écureuilDocument8 pagesEtude Expérimentale Des Propriétés de Fonctionnement D'un Moteur Asynchrone À Cage D'écureuilbourja ilyassNo ratings yet
- Electronique - Base CoursDocument68 pagesElectronique - Base CoursKawtar Ait naniNo ratings yet