The International Journal Of Engineering And Science (IJES) || Volume || 2 ||Issue|| 12 || Pages || 85-91 || 2013 || ISSN (e): 2319
1813 ISSN (p): 2319 1805
A New Approach Based on Sinusoidal PWM Inverter with PI Controller for Vector control of Induction Motor
Nirban Chakraborty, Prof. Goutam Kr. Panda, Prof. Pradip Kr. Saha
1
PG Scholar, Department of Electrical Engineering, Jalpaiguri Government Engineering College, Japlaiguri West Bengal, India, Pin-735102 2 HOD and Professor, Department of Electrical Engineering, Jalpaiguri Government Engineering College, Japlaiguri, West Bengal, India, Pin-735102 3 Professor, Department of Electrical Engineering, Jalpaiguri Government Engineering College, Japlaiguri, West Bengal, India, Pin-735102
------------------------------------------------------------ABSTRACT--------------------------------------------------------This paper is mainly based on the vector control of Induction motor (IM). The analysis of mathematical model of IM, with the powerful simulation modeling capabilities of Mat lab/ Simulink is given here. The entire module of this IM is divided into several independent functional module such as IM body module, Inverter module, coordinate transformation module and Sinusoidal pulse width modulation (SPWM) production module and so on. With the help of this module we can analyze a variety of different simulation waveforms, which provide an effective means for the analysis and design of the IM control system.
Keywords - Clarke Transformation, Park Transformation, Mathematical model of Induction motor,
Sinusoidal pulse width modulation, Vector control. --------------------------------------------------------------------------------------------------------------------------------------Date of Submission: 28 November 2013 Date of Acceptance: 15 December 2013 --------------------------------------------------------------------------------------------------------------------------------------
I. INTRODUCTION
Among all types of ac machine, the Induction machine (IM), particularly the cage type, is most commonly used in industry. These machines are very economical, rugged and reliable and available in the ranges of fractional horse power (FHP) to multi-megawatt capacity. Low-power FHP machines are available in single-phase, but poly-phase (three-phase) machines are used most often in variable-speed drives. In vector control the IM can be controlled like a separately excited dc motor, brought a renaissance in the highperformance control of ac drives. In vector control the Magnetic field can be decoupled to get a good control performance, hence the torque and flux can be controlled independently [6]. The analysis of mathematical model of IM, with the powerful simulation modeling capabilities of Mat lab/ Simulink, the IM control system will be divided into several independent functional modules such as IM motor module, inverter module, coordinate transformation module and SPWM production module and so on. By combining these modules, the simulation model of IM control system can be built.
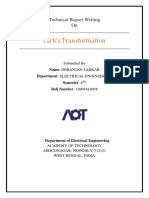
II. STATIONARY TO ROTATING REFERENCE FRAME TRANSFORMATION
Three phase ac machines conventionally use phase variable notation. For a balanced three phase, star connected machine we havefa+fb+fc=0
Fig.1. Current space vector in stationary and rotating reference frame
www.theijes.com
The IJES
Page 85
A New Approach Based on Sinusoidal PWM Inverter with PI Controller for Vector control of Induction Motor Where fa, fb and fc denote any one of current, voltage and flux linkage [1].
III. CLARK TRANSFORMATION
The transformation from three-phase to two-phase quantities can be written in matrix form as: = 2/3 (1)
Where f and f are orthogonal space phasor. The stator current space vector is defined as the complex quantity [1]: (2) It is possible to write (2) more compactly as: (3) Where ia, ib and ic are instantaneous phase currents and is a vector operator that produces a vector rotation of = (2)/3. The choice of the constant in the transformation of equation (1) is somewhat arbitrary. Here, the value of 2/3 is chosen. Its main advantage is that magnitudes are preserved across the transformation. The inverse relationship is written as:
(4)
Transformation equations (1) and (4) are known as the Forward Clarke Transformation and Reverse Clarke Transformation respectively.
IV. PARK TRANSFORMATION
For the transformation of stationary stator variables to rotating reference frame we use park transformation and then we write in matrix form as: = (5)
Where r is the angle between stationary reference frames and rotating reference frame is shown in Fig.1. Transformation equation (5) is known as Park transformation. V. MATHEMATICAL MODEL OF INDUCTION MOTOR The mathematical model of an IM [6] in terms of phase voltages for stator and rotor can be written as: For stator: = For rotor: = +p (7) +p (6)
The flux linkage can be written as in matrix from: = The flux linkage equations are: = www.theijes.com (9) The IJES Page 86 (8)
A New Approach Based on Sinusoidal PWM Inverter with PI Controller for Vector control of Induction Motor = Where, (10)
(11)
(12)
(13)
(14)
Now applying the transformations (1) and (5) to voltages, flux linkages and currents in the equations (6), (7), (9) and (10) we get a set of simple transformed equations as: The voltage equation in q-d reference frame: = = = = (15) (16) (17) (18)
The flux linkage equation in q-d reference frame: = =( = = ( ) ) (19) (20) (21) (22)
Here, and are leakage and mutual inductance respectively. is the synchronous speed and speed of the rotor . The electromagnetic torque ( ) for rotor current can be written as: = (3/2)(P/2) (23)
is the
The electromagnetic torque ( ) for stator current can be written as:
www.theijes.com
The IJES
Page 87
A New Approach Based on Sinusoidal PWM Inverter with PI Controller for Vector control of Induction Motor = (3/2)(P/2) (24) The equation for motor dynamics is: = + + (25)
VI. VECTOR CONTROL
Vector control is also known as decoupling or field orientated control. Vector control decouples three -phase stator current into two phase d-q axis current, one producing flux and other producing torque [2]. This allows direct control of flux and torque [5]. In case of vector control of an IM drives operates similarly like a separately excited dc motor drive. In a dc machine, neglecting the armature reaction effect and field saturation, the developed torque is given by
Fig.2. Dc motor model = (26)
Where = armature current and = field current. The construction of a dc machine is such that the field flux produced by the current is perpendicular to the armature flux , which is produced by the armature current [3] . These space vectors, which are stationary in space, are orthogonal or decoupled in nature. So in case of an IM the phase currents are decoupled in q-d reference frame for vector controlling. The dc motor model is shown in the fig.2.[4] When three-phase voltages are applied to the machine, they produced three-phase fluxes both in the stator and the rotor. The three-phase fluxes can be represented in a two-phase stationary ( ) frame. If these two phase fluxes along ( ) axes are represented by a single-vector then all the machine flux will be aligned along that vector. This vector is commonly specified as d-axis which makes an angle with the stationary frame -axis, as shown in the fig. 3. The q-axis is set perpendicular to the d-axis. The flux along the q-axis in case will obviously zero. The phasor diagram fig.3 presents these axes. When the machine input current change sinusoid ally in time, the angle keeps changing. Thus the problem is to know the angle accurately, so that the d-axis of d-q frame is locked with the flux vector.
Fig.3. Phasor diagram of a field orientated system The controller part of the vector control of IM is inverse transformed from q-d reference frame to reference frame and then to the stationary phase voltage frame which is then given through a inverter to the machine model part. www.theijes.com The IJES Page 88
A New Approach Based on Sinusoidal PWM Inverter with PI Controller for Vector control of Induction Motor
VII. SINUSOIDAL PWM
Fig.4. shows circuit model of three phase PWM inverter [5] and Fig.4. Shows waveforms of carrier signal (Vtri) and control signal (Vcontrol), inverter output line to neutral voltages are VAO, VBO, VCO, inverter output line to line voltages are VAB, VBC, VCA respectively.
Fig.4.Three phase PWM inverter
Fig.5. Waveforms of three phase sinusoidal PWM inverter
The inverter output voltages are determined as follows: When Vcontrol > Vtri, VAO = VDC/2 When Vcontrol < Vtri, VAO = -VDC/2 Where VAB = VAO-VBO, VBC = VBO-VCO, VCA = VCO-VAO.
VIII. FIGURES AND TABLES
Here we take the base speed as 200rpm and we observe form the waveform of the speed that the rotor speed almost gives the desired response. The total simulation time of the motor is t=0.4sec. In current wave form we see that the three phases current almost perfectly merge with each other. We also observe the electromagnetic torque, inverter output voltage waveform and dq axis current waveform We take Stator resistance (rs) = 6.03, Rotor resistance (rr) = 6.085, Stator inductance (Ls) = 489.3e-3, Rotor inductance (Lr) = 489.3e-3, Poles (P) = 4,
www.theijes.com
The IJES
Page 89
A New Approach Based on Sinusoidal PWM Inverter with PI Controller for Vector control of Induction Motor
Fig 6: Three Phase Current response curve
Fig 7: Speed Response curve
Fig 8: Electromagnetic Response Curve
Fig 9: Inverter Output Voltage Waveform
Fig 10: d-axis current Waveform www.theijes.com The IJES Page 90
A New Approach Based on Sinusoidal PWM Inverter with PI Controller for Vector control of Induction Motor
Fig 11: q-axis current Waveform
IX. CONCLUSION
In this paper vector control has been described in adequate detail and has been implemented on IM in real time. The performance of the IM is quite satisfactory by using PI controller and Sinusoidal pulse width modulated inverter. The selection of the value of the proportional gain and integral gain has a significant impact on the model performance. By varying the inverter voltage we can get steady response for high speeds also. The performance of vector control is quite satisfactory for achieving fast reversal of IM even at very high speed range.
REFERENCES
[1] [2] [3] [4] [5] [6] J.Holtz, Sensorless control of Induction Motor Drives Procedings of IEEE, Vol.90. No 8, August 2002, PP 1359 -1394. M.Jemli, M.Boussak, M.Godda and M.B.A.Kamoun MRAS Identification Schemes for Sensorless Indirect Field Oriented Contorl of Induction Motor Drives With Rotor Resistance Tuning Proc.of ICEM,Turkey 1998 PP 1572 -157 S.Tamai, H.Sugimoto, and M.Yano, Speed sensorless vector control of induction motor with model reference adaptive system, in Conf.Rec.IEEE-IAS Annu. Meeting, 1987, pp. 189-195. Bimal K. Bose, Modern Power Electronics and Ac drives. R. Krishnan, Electric Motor Drives. Amresh Kumar Ray, Kaushal Prasad and Nitish Kumar The Application of Variable Frequency Drive as an efficient control element in cement industry in the IJES ||Volume 2||Issue 8||50 -56||2013, ISSN (e): 2319-1813 ISSN(p): 2319-1805.
www.theijes.com
The IJES
Page 91
You might also like
- VECXOR CONTROL TECHNIQUES FOR INDUCTION MOTORSDocument6 pagesVECXOR CONTROL TECHNIQUES FOR INDUCTION MOTORSThinseepNo ratings yet
- A Novel Current Controlled Space Vector Modulation Based Control Scheme For Reducing Torque Ripple in Brushless DC DrivesDocument7 pagesA Novel Current Controlled Space Vector Modulation Based Control Scheme For Reducing Torque Ripple in Brushless DC DrivesKoukou AmkoukouNo ratings yet
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- A New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterDocument8 pagesA New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterVenktesh MishraNo ratings yet
- Direct Torque Control of Brushless Doubly Fed Induction MachineDocument12 pagesDirect Torque Control of Brushless Doubly Fed Induction Machinejagarov4954No ratings yet
- Wind TurbineDocument5 pagesWind TurbineAnthony WellsNo ratings yet
- Implementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERDocument6 pagesImplementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERIDESNo ratings yet
- Modeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DDocument5 pagesModeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DSundaraPandiyanNo ratings yet
- 2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1Document6 pages2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1ashikhmd4467No ratings yet
- IJSC Vol2 Iss1 253 260 2 PDFDocument8 pagesIJSC Vol2 Iss1 253 260 2 PDFMd Mustafa KamalNo ratings yet
- Vector Control of A Permanent-Magnet Synchronous Motor Using AC-AC Matrix ConverterDocument11 pagesVector Control of A Permanent-Magnet Synchronous Motor Using AC-AC Matrix ConverterKushagra KhamesraNo ratings yet
- PWM Switching Strategy For Torque Ripple Minimization in BLDC MotorDocument6 pagesPWM Switching Strategy For Torque Ripple Minimization in BLDC MotorekaliappanNo ratings yet
- Paper 4 - p302Document6 pagesPaper 4 - p302Sherif M. DabourNo ratings yet
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocument6 pagesArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNo ratings yet
- A Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsDocument9 pagesA Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsInternational Journal of Engineering Inventions (IJEI)No ratings yet
- Fuzzy PI Speed Controller for Induction Motors Using FPGADocument7 pagesFuzzy PI Speed Controller for Induction Motors Using FPGABharati RajaNo ratings yet
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDocument6 pagesInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNo ratings yet
- Vector Control of AC Motor Drive For Active Damping of Output Using Passive Filter ResonanceDocument6 pagesVector Control of AC Motor Drive For Active Damping of Output Using Passive Filter ResonanceijaertNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Simulation by Composite ModelDocument8 pagesSimulation by Composite Modelanshgarg786No ratings yet
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsDocument7 pagesEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainNo ratings yet
- An Optimized Control Method Based On Dual Three-Level Inverters For Open-End Winding Induction Motor DrivesDocument9 pagesAn Optimized Control Method Based On Dual Three-Level Inverters For Open-End Winding Induction Motor DrivesCharles KellyNo ratings yet
- Space-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationDocument8 pagesSpace-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationinfodotzNo ratings yet
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulNo ratings yet
- Comparison of SPWM and SVPWM Scheme For Two-Level Inverter Fed Induction Motor DriveDocument6 pagesComparison of SPWM and SVPWM Scheme For Two-Level Inverter Fed Induction Motor Drivemanish_er570No ratings yet
- FQC IISC-250kvaDocument23 pagesFQC IISC-250kvaDeepak GehlotNo ratings yet
- Modeling and Simulation of A PWM Rectifier Inverter Induction Motor Drive System Implementing Speed Sensor Less Direct Vector ControlDocument6 pagesModeling and Simulation of A PWM Rectifier Inverter Induction Motor Drive System Implementing Speed Sensor Less Direct Vector ControlFarhan SarwarNo ratings yet
- Chapter 1 Introduction A. Background: Full Speed, Torque Acceleration Deceleration. Power ConsumptionDocument13 pagesChapter 1 Introduction A. Background: Full Speed, Torque Acceleration Deceleration. Power ConsumptionfirmanNo ratings yet
- IM ModelDocument32 pagesIM ModelVijay KumarNo ratings yet
- Four Switch Three Phase Inverter Control of BLDC MotorDocument6 pagesFour Switch Three Phase Inverter Control of BLDC MotorBhargav Cho ChweetNo ratings yet
- Dynamic Modelling of Induction MotorDocument12 pagesDynamic Modelling of Induction Motorvidya_sagar826No ratings yet
- Hysteresis ControllerDocument9 pagesHysteresis ControllerengrarNo ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- New Torque Control Scheme for Electric Vehicle MotorsDocument7 pagesNew Torque Control Scheme for Electric Vehicle MotorsPrasanth RamavarapuNo ratings yet
- Harmonic Reduction in Parallel Inverters Using THIPWMDocument6 pagesHarmonic Reduction in Parallel Inverters Using THIPWMAhmed JanadNo ratings yet
- Analysis of Single Phase Matrix ConverterDocument6 pagesAnalysis of Single Phase Matrix ConverterNarhari AhirraoNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- Karampuri 2016Document6 pagesKarampuri 2016Kill MongerNo ratings yet
- Modelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkDocument7 pagesModelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkkrcdewanewNo ratings yet
- Adaptive Backstepping Control of Separately Excited DC MotorDocument6 pagesAdaptive Backstepping Control of Separately Excited DC MotorEngr XamirNo ratings yet
- Closed Loop Control of Hexagram Inverter: G.Renukadevi, K.RajambalDocument8 pagesClosed Loop Control of Hexagram Inverter: G.Renukadevi, K.Rajambalrenunila100% (1)
- Power System Dynamics and ControlDocument9 pagesPower System Dynamics and ControlBiplab SarkarNo ratings yet
- Simulation of DFIG Wind Turbines Ride Through CapabilityDocument9 pagesSimulation of DFIG Wind Turbines Ride Through CapabilityDanny LiNo ratings yet
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 pagesAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNo ratings yet
- Stand Alone Self ExcitedDocument6 pagesStand Alone Self ExcitedSamundra GurungNo ratings yet
- 2Document6 pages2Sairam SaiNo ratings yet
- Fem PWM Inverter MaxwellDocument15 pagesFem PWM Inverter MaxwellBala KrishnanNo ratings yet
- Control VectorialDocument6 pagesControl VectorialdanipedoNo ratings yet
- Modelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesDocument7 pagesModelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesskrtamilNo ratings yet
- Unipolar and Bipolar SPWM Voltage Modulation Type Inverter For Improved SwitchingDocument5 pagesUnipolar and Bipolar SPWM Voltage Modulation Type Inverter For Improved SwitchingOdnamra AlvarezNo ratings yet
- Ijest12 04 01 032 PDFDocument6 pagesIjest12 04 01 032 PDFNius Pahala NainggolanNo ratings yet
- Paper ID 105Document6 pagesPaper ID 105hassenbbNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDocument7 pagesSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Literacy Level in Andhra Pradesh and Telangana States - A Statistical StudyDocument8 pagesLiteracy Level in Andhra Pradesh and Telangana States - A Statistical StudytheijesNo ratings yet
- The Effect of Firm Size and Diversification On Capital Structure and FirmValue (Study in Manufacturing Sector in Indonesia Stock Exchange)Document12 pagesThe Effect of Firm Size and Diversification On Capital Structure and FirmValue (Study in Manufacturing Sector in Indonesia Stock Exchange)theijesNo ratings yet
- A Statistical Study On Age Data in Census Andhra Pradesh and TelanganaDocument8 pagesA Statistical Study On Age Data in Census Andhra Pradesh and TelanganatheijesNo ratings yet
- Means of Escape Assessment Procedure For Hospital's Building in Malaysia.Document5 pagesMeans of Escape Assessment Procedure For Hospital's Building in Malaysia.theijesNo ratings yet
- Improving Material Removal Rate and Optimizing Variousmachining Parameters in EDMDocument5 pagesImproving Material Removal Rate and Optimizing Variousmachining Parameters in EDMtheijesNo ratings yet
- Industrial Installation Skills Acquired and Job Performance of Graduates of Electrical Installation and Maintenance Works Trade of Technical Colleges in North Eastern NigeriaDocument8 pagesIndustrial Installation Skills Acquired and Job Performance of Graduates of Electrical Installation and Maintenance Works Trade of Technical Colleges in North Eastern NigeriatheijesNo ratings yet
- Impact of Sewage Discharge On Coral ReefsDocument5 pagesImpact of Sewage Discharge On Coral ReefstheijesNo ratings yet
- Defluoridation of Ground Water Using Corn Cobs PowderDocument4 pagesDefluoridation of Ground Water Using Corn Cobs PowdertheijesNo ratings yet
- Gating and Residential Segregation. A Case of IndonesiaDocument7 pagesGating and Residential Segregation. A Case of IndonesiatheijesNo ratings yet
- Big Data Analytics in Higher Education: A ReviewDocument8 pagesBig Data Analytics in Higher Education: A ReviewtheijesNo ratings yet
- Studio of District Upgrading Project in Amman - Jordan Case Study - East District WahdatDocument5 pagesStudio of District Upgrading Project in Amman - Jordan Case Study - East District WahdattheijesNo ratings yet
- Experimental Study On Gypsum As Binding Material and Its PropertiesDocument15 pagesExperimental Study On Gypsum As Binding Material and Its PropertiestheijesNo ratings yet
- Analytical Description of Dc Motor with Determination of Rotor Damping Constant (Β) Of 12v Dc MotorDocument6 pagesAnalytical Description of Dc Motor with Determination of Rotor Damping Constant (Β) Of 12v Dc MotortheijesNo ratings yet
- Multimedia Databases: Performance Measure Benchmarking Model (PMBM) FrameworkDocument10 pagesMultimedia Databases: Performance Measure Benchmarking Model (PMBM) FrameworktheijesNo ratings yet
- Data Clustering Using Autoregressive Integrated Moving Average (ARIMA) Model For Islamic Country Currency: An Econometrics Method For Islamic Financial EngineeringDocument10 pagesData Clustering Using Autoregressive Integrated Moving Average (ARIMA) Model For Islamic Country Currency: An Econometrics Method For Islamic Financial EngineeringtheijesNo ratings yet
- Performance Evaluation of Calcined Termite Mound (CTM) Concrete With Sikament NN As Superplasticizer and Water Reducing AgentDocument9 pagesPerformance Evaluation of Calcined Termite Mound (CTM) Concrete With Sikament NN As Superplasticizer and Water Reducing AgenttheijesNo ratings yet
- The Effect of Organizational Culture On Organizational Performance: Mediating Role of Knowledge Management and Strategic PlanningDocument8 pagesThe Effect of Organizational Culture On Organizational Performance: Mediating Role of Knowledge Management and Strategic PlanningtheijesNo ratings yet
- A Study For Applications of Histogram in Image EnhancementDocument5 pagesA Study For Applications of Histogram in Image EnhancementtheijesNo ratings yet
- A Lightweight Message Authentication Framework in The Intelligent Vehicles SystemDocument7 pagesA Lightweight Message Authentication Framework in The Intelligent Vehicles SystemtheijesNo ratings yet
- Mixed Model Analysis For OverdispersionDocument9 pagesMixed Model Analysis For OverdispersiontheijesNo ratings yet
- Design and Simulation of A Compact All-Optical Differentiator Based On Silicon Microring ResonatorDocument5 pagesDesign and Simulation of A Compact All-Optical Differentiator Based On Silicon Microring ResonatortheijesNo ratings yet
- Development of The Water Potential in River Estuary (Loloan) Based On Society For The Water Conservation in Saba Coastal Village, Gianyar RegencyDocument9 pagesDevelopment of The Water Potential in River Estuary (Loloan) Based On Society For The Water Conservation in Saba Coastal Village, Gianyar RegencytheijesNo ratings yet
- Marginal Regression For A Bi-Variate Response With Diabetes Mellitus StudyDocument7 pagesMarginal Regression For A Bi-Variate Response With Diabetes Mellitus StudytheijesNo ratings yet
- Short Review of The Unitary Quantum TheoryDocument31 pagesShort Review of The Unitary Quantum TheorytheijesNo ratings yet
- Energy Conscious Design Elements in Office Buildings in HotDry Climatic Region of NigeriaDocument6 pagesEnergy Conscious Design Elements in Office Buildings in HotDry Climatic Region of NigeriatheijesNo ratings yet
- Status of Phytoplankton Community of Kisumu Bay, Winam Gulf, Lake Victoria, KenyaDocument7 pagesStatus of Phytoplankton Community of Kisumu Bay, Winam Gulf, Lake Victoria, KenyatheijesNo ratings yet
- The Effect of Varying Span On Design of Medium Span Reinforced Concrete T-Beam Bridge DeckDocument4 pagesThe Effect of Varying Span On Design of Medium Span Reinforced Concrete T-Beam Bridge DecktheijesNo ratings yet
- Fisher Theory and Stock Returns: An Empirical Investigation For Industry Stocks On Vietnamese Stock MarketDocument7 pagesFisher Theory and Stock Returns: An Empirical Investigation For Industry Stocks On Vietnamese Stock MarkettheijesNo ratings yet
- Integrated Approach To Wetland Protection: A Sure Means For Sustainable Water Supply To Local Communities of Nyando Basin, KenyaDocument6 pagesIntegrated Approach To Wetland Protection: A Sure Means For Sustainable Water Supply To Local Communities of Nyando Basin, KenyatheijesNo ratings yet
- Evaluation of Tax Inspection On Annual Information Income Taxes Corporation Taxpayer (Study at Tax Office Pratama Kendari)Document5 pagesEvaluation of Tax Inspection On Annual Information Income Taxes Corporation Taxpayer (Study at Tax Office Pratama Kendari)theijesNo ratings yet
- Pelton Wheel Lab Report Revised SDocument12 pagesPelton Wheel Lab Report Revised STalha100% (1)
- AS (GCE) Instant Revision of ChemistryDocument130 pagesAS (GCE) Instant Revision of ChemistryOlivia Panterka Vainilla100% (4)
- Pile RefereneDocument24 pagesPile RefereneamazonNo ratings yet
- BS 6166-1Document12 pagesBS 6166-1FEKINo ratings yet
- Study On Torsional Stiffness of Engine CrankshaftDocument5 pagesStudy On Torsional Stiffness of Engine CrankshaftBestin VargheseNo ratings yet
- Press Fit Pressure Calculator - Optimize Your Interference - Transition Fit DesignDocument2 pagesPress Fit Pressure Calculator - Optimize Your Interference - Transition Fit Designankitsarvaiya100% (1)
- Year 9 Unit 9 Forces in ActionDocument5 pagesYear 9 Unit 9 Forces in ActionCatherine ChanNo ratings yet
- Flexural STrength of Beam ASTM C78Document5 pagesFlexural STrength of Beam ASTM C78Bunkun15No ratings yet
- Assignment BDocument2 pagesAssignment BWilson JonesNo ratings yet
- FRP Column AbaqusDocument14 pagesFRP Column AbaqusAlvin PurmawinataNo ratings yet
- Nano Spray Dryer B-90 - Literature Review and ApplicationsDocument8 pagesNano Spray Dryer B-90 - Literature Review and ApplicationsprinceamitNo ratings yet
- FP A08e15 Od01 - DS - 0 0 5 PDFDocument2 pagesFP A08e15 Od01 - DS - 0 0 5 PDFYura DankoNo ratings yet
- Signal Reconstruction from CWT CoefficientsDocument8 pagesSignal Reconstruction from CWT CoefficientsBiswajeet ChampatyNo ratings yet
- Centurion University of Technology and Management: Recent Developments in Mechanical Engineering (Rdme - 2019)Document5 pagesCenturion University of Technology and Management: Recent Developments in Mechanical Engineering (Rdme - 2019)Babuli KumarNo ratings yet
- Mae 5130: Viscous Flows: Lecture 3: Kinematic PropertiesDocument23 pagesMae 5130: Viscous Flows: Lecture 3: Kinematic Propertiesriteish singhNo ratings yet
- 1/4-car ride model overviewDocument11 pages1/4-car ride model overviewcanup1990No ratings yet
- Ordinary Level Heat NotesDocument44 pagesOrdinary Level Heat Notespatrick omonyNo ratings yet
- Is 6452 High Alumina Cement For Structural Use-SpecificationDocument10 pagesIs 6452 High Alumina Cement For Structural Use-SpecificationRamarraju KalidindiNo ratings yet
- Phys 1004 - Cheat - Sheet. Electromagnetism and WavesDocument2 pagesPhys 1004 - Cheat - Sheet. Electromagnetism and WavesNadya B.No ratings yet
- Advances in Phased Array Compound S-Scan DesignDocument18 pagesAdvances in Phased Array Compound S-Scan Designhcmcrlho100% (1)
- Doucet, de Freitas, Gordon - An Introduction To Sequential Monte Carlo MethodsDocument12 pagesDoucet, de Freitas, Gordon - An Introduction To Sequential Monte Carlo MethodsevgeniaNo ratings yet
- Airy FunctionDocument10 pagesAiry Functionalokesh1982No ratings yet
- Magnetic Field and Magnetic Effects of Current: Assignment 2Document2 pagesMagnetic Field and Magnetic Effects of Current: Assignment 2HaRryNo ratings yet
- Unit 2 MCB Key PDFDocument19 pagesUnit 2 MCB Key PDFDafne Fertig88% (32)
- Master Track Energy and Process TechnologyDocument5 pagesMaster Track Energy and Process TechnologyGeorge CarmelNo ratings yet
- COT Science 6 Q3 DLP-simple Machine - PPTX Version 1Document75 pagesCOT Science 6 Q3 DLP-simple Machine - PPTX Version 1Bryan Bangiban83% (18)
- Numerical Methods in Rock MechanicsDocument24 pagesNumerical Methods in Rock Mechanicsali100% (2)
- Copia de GranulometriaDocument1 pageCopia de GranulometriaSantiago GiraldoNo ratings yet
- Closing The Gaps in Inertial Motion Tracking (MUSE - Magnitometer-Cenrtic Sensor Fusion) (Romit Roy Choudhury) (2018) (PPTX)Document60 pagesClosing The Gaps in Inertial Motion Tracking (MUSE - Magnitometer-Cenrtic Sensor Fusion) (Romit Roy Choudhury) (2018) (PPTX)ip01No ratings yet
- 07apr Mat183 Mat193 Mat421Document6 pages07apr Mat183 Mat193 Mat421Ahmad Mustaqim100% (1)