You might also like
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Process Control Lab ManualDocument30 pagesProcess Control Lab ManualAkash Sundar50% (2)
- Process Temperature Control Using PID and LabVIEWDocument17 pagesProcess Temperature Control Using PID and LabVIEWManish SinghNo ratings yet
- MATLAB Simulation of Open & Closed Loop Control SystemsDocument5 pagesMATLAB Simulation of Open & Closed Loop Control SystemsNahin Amin100% (1)
- Experiment 24: The Potentiometer: PurposeDocument6 pagesExperiment 24: The Potentiometer: PurposekirtiNo ratings yet
- AFPT921 Air Flow Pressure Temperature Control TrainingDocument2 pagesAFPT921 Air Flow Pressure Temperature Control TrainingKamalanathen ChlvnNo ratings yet
- Heat Lab 4Document8 pagesHeat Lab 4Rubanraj RajendrenNo ratings yet
- Unsteady State Conduction in a Solid ExperimentDocument7 pagesUnsteady State Conduction in a Solid ExperimentBilenNo ratings yet
- National Institute of Technology, Rourkela: Department of Electrical EngineeringDocument11 pagesNational Institute of Technology, Rourkela: Department of Electrical Engineeringvineeth kumarNo ratings yet
- EKC 291 9 Heat ConductionDocument11 pagesEKC 291 9 Heat ConductionLia HolmanNo ratings yet
- Experiment 4 Study On Dynamics of First Order and Second OrderDocument12 pagesExperiment 4 Study On Dynamics of First Order and Second OrderQastalani Ghazali100% (1)
- 2019-20 HV Lab Manual Updated 078Document55 pages2019-20 HV Lab Manual Updated 078madhulavNo ratings yet
- Chemical ThermodynamicsDocument33 pagesChemical ThermodynamicsAkash Ghosh0% (1)
- Tom Lab ManualDocument24 pagesTom Lab Manualm_er100No ratings yet
- First Order SystemDocument21 pagesFirst Order SystemNiranjan BeheraNo ratings yet
- Control System Lab ManualDocument56 pagesControl System Lab ManualSrinivas Kondal Rao100% (3)
- Chapter 4Document49 pagesChapter 4Ibrahim Al-HammadiNo ratings yet
- DSTWU - A Shortcut Distillation Model in Aspen Plus® V8.0: 1. Lesson ObjectivesDocument39 pagesDSTWU - A Shortcut Distillation Model in Aspen Plus® V8.0: 1. Lesson Objectivesnico123456789No ratings yet
- CHME324-B-Lab Manual Fall 2016 (Ahmed Elkhatat)Document99 pagesCHME324-B-Lab Manual Fall 2016 (Ahmed Elkhatat)bebsybiswezNo ratings yet
- A Computer Program For The Correlation of Binary Vapor-Liquid Equilibrium DataDocument52 pagesA Computer Program For The Correlation of Binary Vapor-Liquid Equilibrium DataJacob H. (Jack) LashoverNo ratings yet
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Document12 pagesDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipNo ratings yet
- Process Control Fundamentals for Continuous OperationsDocument21 pagesProcess Control Fundamentals for Continuous Operationsحاتم غيدان خلفNo ratings yet
- Process Control Exam Review0.1830.43640.58850.61860.93675.1831. The integral term of the controller at t=6 min is(mA)Response No.Response0010.08820.1830.43640.58850.61860.93675.18Document9 pagesProcess Control Exam Review0.1830.43640.58850.61860.93675.1831. The integral term of the controller at t=6 min is(mA)Response No.Response0010.08820.1830.43640.58850.61860.93675.18Kalmah3636No ratings yet
- Lab Manual Electrical Workshop4 IDocument47 pagesLab Manual Electrical Workshop4 Ishoaib ehsanNo ratings yet
- Closed loop temperature controlDocument6 pagesClosed loop temperature controlsjsujiprasadNo ratings yet
- HEAT CONDUCTION LAB REPORTDocument7 pagesHEAT CONDUCTION LAB REPORTYi Ling GohNo ratings yet
- AutomaticControlforMechanicalEngineersByM GalalRabieoptDocument176 pagesAutomaticControlforMechanicalEngineersByM GalalRabieoptHectorVasquezLaraNo ratings yet
- Can Bang Long HoiDocument370 pagesCan Bang Long HoiKhanh Nguyen100% (1)
- EE321 LAb6Document18 pagesEE321 LAb6Brown Tukalou100% (1)
- Exp-40 Part2Document22 pagesExp-40 Part2Ahmet Samet ÖzdilekNo ratings yet
- Humidity and Temperature Measurement Using Arduino: Submitted ByDocument22 pagesHumidity and Temperature Measurement Using Arduino: Submitted Byhandsome03No ratings yet
- Control of Temperature System 2Document18 pagesControl of Temperature System 2mustafa Al AsfourNo ratings yet
- Basic Electronics - JFET - TutorialspointDocument6 pagesBasic Electronics - JFET - Tutorialspointgunasekaran k100% (1)
- Learning from Experience Improves Robot OperationDocument18 pagesLearning from Experience Improves Robot OperationPeps Peps PepsNo ratings yet
- Real-World-Modeling PDFDocument12 pagesReal-World-Modeling PDFGATOMICONo ratings yet
- Effect of Mass TransferDocument5 pagesEffect of Mass Transferengr20210% (1)
- Process Control Lab ManualDocument32 pagesProcess Control Lab ManualRakesh Kumar Patnaik50% (2)
- Lab Manuals 2CH403 IPC Jan 2020 PDFDocument47 pagesLab Manuals 2CH403 IPC Jan 2020 PDFSamriddha Das GuptaNo ratings yet
- High VoltageDocument30 pagesHigh VoltageMohammed Mansoor100% (1)
- Process Control & Instrumentations CEV 544 PrelabDocument9 pagesProcess Control & Instrumentations CEV 544 PrelabFaradilah Binti Ajma'inNo ratings yet
- Sec01 - GroupE - (Unsteady State Heat Transfer)Document11 pagesSec01 - GroupE - (Unsteady State Heat Transfer)Dzulfadhly ShaariNo ratings yet
- Study of P, PD, Pi, Pid Controllers Using Mat LabDocument13 pagesStudy of P, PD, Pi, Pid Controllers Using Mat LabVignesh NagarajanNo ratings yet
- Liquid Diffusion Coefficient Apparatus BP09Document4 pagesLiquid Diffusion Coefficient Apparatus BP09Ahmed AliNo ratings yet
- Ench 529 Virtual Lab (E5) InstructionsDocument2 pagesEnch 529 Virtual Lab (E5) Instructionsench501No ratings yet
- CEIC3002 Project Description 2011Document6 pagesCEIC3002 Project Description 2011MF_WANZNo ratings yet
- Composite WallDocument6 pagesComposite WallRushabh PatelNo ratings yet
- PHE Control Mechanism PDFDocument6 pagesPHE Control Mechanism PDFNaren VmdNo ratings yet
- Lab Report R3 Batch ReactorDocument9 pagesLab Report R3 Batch Reactorzy_yf0% (1)
- Report of An Industrial Visit To Reliance Thermal Power Plant, DahanuDocument8 pagesReport of An Industrial Visit To Reliance Thermal Power Plant, DahanuAmeya VirkudNo ratings yet
- dx10 02 3 Gen2factor PDFDocument18 pagesdx10 02 3 Gen2factor PDFELFER OBISPO GAVINONo ratings yet
- Ipcnotes For DistributionDocument159 pagesIpcnotes For Distributionavinashpatil2408No ratings yet
- D - Two-Phase Flow Lab ManualDocument23 pagesD - Two-Phase Flow Lab ManualdanielNo ratings yet
- Finite Control Volume AnalysisDocument30 pagesFinite Control Volume Analysishari tubagusNo ratings yet
- Chemical Engineering ThermodynamicsDocument282 pagesChemical Engineering ThermodynamicsC JayaKumarNo ratings yet
- Enthalpy PDFDocument3 pagesEnthalpy PDFAnonymous NxpnI6jCNo ratings yet
- Fluid Mechanics II (Chapter 4)Document20 pagesFluid Mechanics II (Chapter 4)sarmadNo ratings yet
- CISE 316 Control Systems Design Lab ManualDocument78 pagesCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- Potentiometer Error Detector CharacteristicsDocument16 pagesPotentiometer Error Detector CharacteristicsAryan Batra100% (1)
- EEE-282N - S&S Quiz, U-1,2 - SolutionsDocument2 pagesEEE-282N - S&S Quiz, U-1,2 - SolutionsMohammad Umar RehmanNo ratings yet
- Lecture 16-17-18 Signal Flow GraphsDocument58 pagesLecture 16-17-18 Signal Flow GraphsMohammad Umar RehmanNo ratings yet
- BrakingDocument19 pagesBrakingMohammad Umar RehmanNo ratings yet
- Drives SolutionsDocument4 pagesDrives SolutionsMohammad Umar RehmanNo ratings yet
- Eec 504Document25 pagesEec 504Mohammad Umar RehmanNo ratings yet
- Field ControlDocument1 pageField ControlMohammad Umar RehmanNo ratings yet
- Turning Your Dissertation Into A Publishable Journal ArticleDocument10 pagesTurning Your Dissertation Into A Publishable Journal ArticleMohammad Umar RehmanNo ratings yet
- Presentation 1Document2 pagesPresentation 1Mohammad Umar RehmanNo ratings yet
- Eee 282n ProblemDocument2 pagesEee 282n ProblemMohammad Umar RehmanNo ratings yet
- Measure resistors in series and parallelDocument3 pagesMeasure resistors in series and parallelAnonymous QvdxO5XTRNo ratings yet
- Teaching Dossier: Andrew W. H. HouseDocument9 pagesTeaching Dossier: Andrew W. H. HouseMohammad Umar RehmanNo ratings yet
- Z01 FRAN6598 07 SE All 0 PDFDocument113 pagesZ01 FRAN6598 07 SE All 0 PDFMohammad Umar RehmanNo ratings yet
- LightLevels Outdoor+indoor PDFDocument5 pagesLightLevels Outdoor+indoor PDFMauricio Cesar Molina ArtetaNo ratings yet
- NLC Synopsis 2Document4 pagesNLC Synopsis 2riddler_007No ratings yet
- Expt 2Document8 pagesExpt 2bryarNo ratings yet
- B.tech. Electrical III SemDocument95 pagesB.tech. Electrical III SemMohammad Umar RehmanNo ratings yet
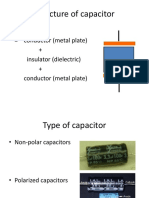
- Structure of Capacitor: - Capacitor Conductor (Metal Plate) + Insulator (Dielectric) + Conductor (Metal Plate)Document11 pagesStructure of Capacitor: - Capacitor Conductor (Metal Plate) + Insulator (Dielectric) + Conductor (Metal Plate)Mohammad Umar RehmanNo ratings yet
- Solving Convolution Problems: PART I: Using The Convolution IntegralDocument4 pagesSolving Convolution Problems: PART I: Using The Convolution IntegralMayank NautiyalNo ratings yet
- 2015JEEADVP 1 SolutionsDocument35 pages2015JEEADVP 1 SolutionsRajdeepNo ratings yet
- Why Teach Mathematical ModellingDocument3 pagesWhy Teach Mathematical ModellingMohammad Umar RehmanNo ratings yet
- ME 422 Control Systems: Steady-State Error NotesDocument4 pagesME 422 Control Systems: Steady-State Error NotesJames W MwangiNo ratings yet
- Chapter 10Document93 pagesChapter 10Carraan Dandeettirra Caala Altakkatakka100% (1)
- 10629Document36 pages10629Mohammad Umar RehmanNo ratings yet
- 2011 - Nature - Grad - Student - Aspirations and Anxieties PDFDocument3 pages2011 - Nature - Grad - Student - Aspirations and Anxieties PDFMohammad Umar RehmanNo ratings yet
- Iare - e Autonomous Regulations and Syllubus - 12Document293 pagesIare - e Autonomous Regulations and Syllubus - 12Mohammad Umar RehmanNo ratings yet
- Power Distribution IITKDocument5 pagesPower Distribution IITKMohammad Umar RehmanNo ratings yet
- Ee 6365 Electrical Engineering Laboratory Manual: (Type Text)Document59 pagesEe 6365 Electrical Engineering Laboratory Manual: (Type Text)Mohammad Umar RehmanNo ratings yet
- Calculus StandardsDocument2 pagesCalculus StandardsMohammad Umar RehmanNo ratings yet
- B015Document40 pagesB015Indrojyoti MondalNo ratings yet
- EE021 - Sub-Station Earth Grid DesignDocument4 pagesEE021 - Sub-Station Earth Grid DesignbhavikNo ratings yet
- AssignmentDocument14 pagesAssignmentapi-561990701No ratings yet
- MIS Unit 2 AssignmentDocument3 pagesMIS Unit 2 AssignmentRajesh AmbroseNo ratings yet
- MPH KPH Detailed InstructionsDocument10 pagesMPH KPH Detailed InstructionsRyan Emmanuel MangulabnanNo ratings yet
- 034 PhotogrammetryDocument19 pages034 Photogrammetryparadoja_hiperbolicaNo ratings yet
- Actia Manual ENDocument4 pagesActia Manual ENmonsieurminou72No ratings yet
- Um m1114 61298 en 1412 PDFDocument55 pagesUm m1114 61298 en 1412 PDFJFco VANo ratings yet
- WachsDocument64 pagesWachsJorgeNo ratings yet
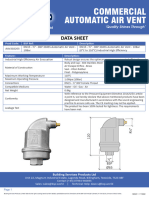
- BSP - Commercial AAV - 10bar - DataSheet - V1.1 - 11-2022Document1 pageBSP - Commercial AAV - 10bar - DataSheet - V1.1 - 11-2022j.iqubalNo ratings yet
- Toshiba NB250-107 - Product..Document2 pagesToshiba NB250-107 - Product..gabriel_danut100% (1)
- Sentinel LM Programmer/'s Reference ManualDocument474 pagesSentinel LM Programmer/'s Reference ManualAshish JoshiNo ratings yet
- 5G-RANGE Brazil Attachment - 0Document73 pages5G-RANGE Brazil Attachment - 0ALEXANDRE JOSE FIGUEIREDO LOUREIRONo ratings yet
- Errer Code List Konica 7145Document16 pagesErrer Code List Konica 7145Pamela MitchellNo ratings yet
- PostgreSQL: Historia, requisitos de instalación y componentes claveDocument7 pagesPostgreSQL: Historia, requisitos de instalación y componentes claveJosue AlmanzaNo ratings yet
- The Unified Kill ChainDocument19 pagesThe Unified Kill ChainManuNo ratings yet
- Siemens Gamesa Wind Turbine 4 X Platform Brochure enDocument4 pagesSiemens Gamesa Wind Turbine 4 X Platform Brochure enMendes NetoNo ratings yet
- Signal Analysis For Radio MonitoringDocument40 pagesSignal Analysis For Radio MonitoringNectaria GizaniNo ratings yet
- Extended Reality XR Over 5G and 5G-Advanced New RaDocument7 pagesExtended Reality XR Over 5G and 5G-Advanced New Ra1RN20IS411No ratings yet
- Test Code2555Document6 pagesTest Code2555JaNo ratings yet
- RPA Automation Boosts Efficiency With BotsDocument3 pagesRPA Automation Boosts Efficiency With BotsMila TanNo ratings yet
- SD Exit Exm Tuto SoLDocument55 pagesSD Exit Exm Tuto SoLTadesse MegersaNo ratings yet
- Cover Letter DellDocument2 pagesCover Letter DellRavi SharmaNo ratings yet
- Polarity Test of TransformerDocument3 pagesPolarity Test of TransformerdebarshiNo ratings yet
- PWC Data Security Report - HealthcareDocument12 pagesPWC Data Security Report - HealthcareWilliamBuckRogersNo ratings yet
- Maintenance of Electrical Equipment For FM Personnel: E-LearningDocument1 pageMaintenance of Electrical Equipment For FM Personnel: E-LearningNigel AngNo ratings yet
- Gxv3140 Usermanual EnglishDocument151 pagesGxv3140 Usermanual Englishindio007No ratings yet
- Endress Houser TMRDocument20 pagesEndress Houser TMRAndriana Teja PermanaNo ratings yet
- MDS Report for PTFE TubeDocument3 pagesMDS Report for PTFE TubeyatheendravarmaNo ratings yet
- Control Gear Fluorescent Electronic EB-ECONOMY Electronic Ballasts For TLD LampsDocument6 pagesControl Gear Fluorescent Electronic EB-ECONOMY Electronic Ballasts For TLD LampsGary LauNo ratings yet
- 5cd6d9a3a16/certificate PDFDocument4 pages5cd6d9a3a16/certificate PDFIzotopСчастьяNo ratings yet
- Arizona, Utah & New Mexico: A Guide to the State & National ParksFrom EverandArizona, Utah & New Mexico: A Guide to the State & National ParksRating: 4 out of 5 stars4/5 (1)
- Naples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoFrom EverandNaples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoRating: 5 out of 5 stars5/5 (1)
- South Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptFrom EverandSouth Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptRating: 5 out of 5 stars5/5 (1)
- The Bahamas a Taste of the Islands ExcerptFrom EverandThe Bahamas a Taste of the Islands ExcerptRating: 4 out of 5 stars4/5 (1)
- New York & New Jersey: A Guide to the State & National ParksFrom EverandNew York & New Jersey: A Guide to the State & National ParksNo ratings yet
- Japanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensFrom EverandJapanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensNo ratings yet