You might also like
- Ultrasonic TOFD flaw sizing and imaging in thin platesDocument6 pagesUltrasonic TOFD flaw sizing and imaging in thin platesSridharan ChandranNo ratings yet
- Ultrasonic TestingDocument85 pagesUltrasonic TestingSathish Raams100% (2)
- Measurement While Drilling: Signal Analysis, Optimization and DesignFrom EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignNo ratings yet
- Liyingsun2010 - Acoustic Emission Sound Source Localization For Crack in The PipelineDocument4 pagesLiyingsun2010 - Acoustic Emission Sound Source Localization For Crack in The PipelineHenriqueNo ratings yet
- Digital Signal Processing Techniques and Applications in Radar Image ProcessingFrom EverandDigital Signal Processing Techniques and Applications in Radar Image ProcessingNo ratings yet
- TOFD Inspection With Phased Arrays: 17th World Conference On Nondestructive Testing, 25-28 Oct 2008, Shanghai, ChinaDocument7 pagesTOFD Inspection With Phased Arrays: 17th World Conference On Nondestructive Testing, 25-28 Oct 2008, Shanghai, ChinafizanlaminNo ratings yet
- Digital Communications: Courses and Exercises with SolutionsFrom EverandDigital Communications: Courses and Exercises with SolutionsRating: 3 out of 5 stars3/5 (2)
- UT Question and AnswersDocument11 pagesUT Question and Answersrzajadgs50% (2)
- Noise in Nanoscale Semiconductor DevicesFrom EverandNoise in Nanoscale Semiconductor DevicesTibor GrasserNo ratings yet
- Ultrasonic Crack Depth Measurement of Surface Bracking Cracks in PipingDocument8 pagesUltrasonic Crack Depth Measurement of Surface Bracking Cracks in Pipingcal2_uniNo ratings yet
- Pana USDocument52 pagesPana USflorin100% (1)
- Amateur Radio Electronics on Your MobileFrom EverandAmateur Radio Electronics on Your MobileRating: 5 out of 5 stars5/5 (1)
- BS7706Document47 pagesBS7706Woodrow FoxNo ratings yet
- Bio Accoustic 131203Document10 pagesBio Accoustic 131203Choirun Nisa Nur AiniNo ratings yet
- Presentation7 - Sonic or Acoustic Log Classroom - NewwwwDocument43 pagesPresentation7 - Sonic or Acoustic Log Classroom - NewwwwIndarti ManikNo ratings yet
- ISO 5577 Foreword - Key terms and definitions for ultrasonic testingDocument24 pagesISO 5577 Foreword - Key terms and definitions for ultrasonic testingmuhammad faizal akbarNo ratings yet
- Introduction of Ultrasonic TestingDocument70 pagesIntroduction of Ultrasonic TestingMAXX ENGINEERS100% (1)
- PHY02Document7 pagesPHY02ben harrisNo ratings yet
- K - Sonic LoggingDocument19 pagesK - Sonic Logginghoho91No ratings yet
- Crack Depth MethodDocument8 pagesCrack Depth MethodNejib GhazouaniNo ratings yet
- Ultrasonic Testing: by Geetanjali Sharma Devendra Singh Amit Kumar JhaDocument55 pagesUltrasonic Testing: by Geetanjali Sharma Devendra Singh Amit Kumar JhandtitcNo ratings yet
- Shear Wave PDFDocument6 pagesShear Wave PDFcutefrenzyNo ratings yet
- Ultrasonic TestingDocument55 pagesUltrasonic Testingdhasdj100% (1)
- Guia Calibracion TofdDocument47 pagesGuia Calibracion Tofdinspeccion_179116669100% (2)
- Technical RequirementsDocument14 pagesTechnical RequirementsLucas GuadaNo ratings yet
- Simulation and Analysis of Ultrasonic Guided Wave Nondestructive Testing of Cofferdam Rod Based On Dispersion CurvesDocument7 pagesSimulation and Analysis of Ultrasonic Guided Wave Nondestructive Testing of Cofferdam Rod Based On Dispersion CurvesDemian PereiraNo ratings yet
- ID Connected Crack Detection and Sizing TechniquesDocument7 pagesID Connected Crack Detection and Sizing TechniquesEduardoNo ratings yet
- Jitter, Noise, and Signal Integrity at High-Speed: A Tutorial - Part IIDocument4 pagesJitter, Noise, and Signal Integrity at High-Speed: A Tutorial - Part IIMarcos PerdomoNo ratings yet
- Acoustic or Ultrasonic UDT Radar and EM Wave Methods NDT PDFDocument46 pagesAcoustic or Ultrasonic UDT Radar and EM Wave Methods NDT PDFgonzalez_m_aNo ratings yet
- Shear Waves On TofdDocument18 pagesShear Waves On TofdmonokoeNo ratings yet
- An Investigationof Non Destructive Testing of Pressure VesselDocument6 pagesAn Investigationof Non Destructive Testing of Pressure VesselAsif HameedNo ratings yet
- TOFD Principle, Limitations, Calibration and InspectionDocument8 pagesTOFD Principle, Limitations, Calibration and InspectionVikas TiwariNo ratings yet
- A Wideband Digital Beamforming Method Based on Stretch ProcessingDocument10 pagesA Wideband Digital Beamforming Method Based on Stretch Processingsukanya_13No ratings yet
- Vibration SeverityDocument11 pagesVibration SeverityDr. R. SharmaNo ratings yet
- The Effects of Conductivity of The Materials Associated With The Wedges On The Loss by DiffractionDocument15 pagesThe Effects of Conductivity of The Materials Associated With The Wedges On The Loss by DiffractionjantjournalNo ratings yet
- Research Article: Multiframe Ultrasonic TOFD Weld Inspection Imaging Based On Wavelet Transform and Image RegistrationDocument9 pagesResearch Article: Multiframe Ultrasonic TOFD Weld Inspection Imaging Based On Wavelet Transform and Image Registrationphan hoang diepNo ratings yet
- TOFD PresentationDocument29 pagesTOFD Presentationnirmalmthp100% (6)
- CHIME - A New Ultrasonic Method For Rapid Screening of Pipe, Plate and Inaccessible GeometriesDocument9 pagesCHIME - A New Ultrasonic Method For Rapid Screening of Pipe, Plate and Inaccessible GeometriesCarlos BustamanteNo ratings yet
- Basics: Ultrasonic Testing MethodDocument7 pagesBasics: Ultrasonic Testing Methodponnivalavans_994423No ratings yet
- 3320 Fiber-Optic CommunicationDocument32 pages3320 Fiber-Optic CommunicationEdward FahmiNo ratings yet
- Basic Principles of Ultrasonic TestingDocument73 pagesBasic Principles of Ultrasonic TestingDeepulal LalanNo ratings yet
- Tofd !!!Document27 pagesTofd !!!PelifullHDNo ratings yet
- Underwater Wireless Communication System: Home Search Collections Journals About Contact Us My IopscienceDocument7 pagesUnderwater Wireless Communication System: Home Search Collections Journals About Contact Us My IopscienceJay SharmaNo ratings yet
- 208 Murugaiyan CorrectedDocument8 pages208 Murugaiyan CorrectedalialatabyNo ratings yet
- Radar Basic TheoryDocument61 pagesRadar Basic TheoryzakiannuarNo ratings yet
- Guide to Using HC-SR04 Ultrasonic Distance SensorDocument6 pagesGuide to Using HC-SR04 Ultrasonic Distance SensorSreejith Skr100% (1)
- Ut IntrDocument25 pagesUt IntrJeevana Sugandha WijerathnaNo ratings yet
- Characteristics of Piezoelectric TransducersDocument50 pagesCharacteristics of Piezoelectric Transducersextremo1No ratings yet
- Basic Principles of Ultrasonic Testing PDFDocument73 pagesBasic Principles of Ultrasonic Testing PDFSisira Chandrasoma100% (1)
- Introduction To WaveletDocument26 pagesIntroduction To WaveletNarasimhan KumaraveluNo ratings yet
- Basics: UT Study Guide. Questions and Answers Fill In, Choose The Right Answer or Write Required Equations or AnswersDocument5 pagesBasics: UT Study Guide. Questions and Answers Fill In, Choose The Right Answer or Write Required Equations or AnswersWahEedNo ratings yet
- Paper Velocimeter SPIE RS07Document12 pagesPaper Velocimeter SPIE RS07Mounika ReddyNo ratings yet
- Noise Figure Measurement in Mobile Radio EnvironmentDocument7 pagesNoise Figure Measurement in Mobile Radio EnvironmentRakeshconclaveNo ratings yet
- An Overview of Microwave Sensor TechnologyDocument8 pagesAn Overview of Microwave Sensor Technology박철승No ratings yet
- Chapters 1,2&4-6 and Additional InformationDocument18 pagesChapters 1,2&4-6 and Additional InformationFaye TolentinoNo ratings yet
- RF Noise Basics and Noise MeasurementDocument6 pagesRF Noise Basics and Noise Measurementse7en_cs0% (1)
- Radar Theory Guide for ControllersDocument43 pagesRadar Theory Guide for Controllersvyashemant83No ratings yet
- Nureg CR 6791Document135 pagesNureg CR 6791aldeanucuNo ratings yet
- S Scan PrincipleDocument9 pagesS Scan PrincipleSou FienNo ratings yet
- AUT Validation Report For Phased Array AUT SystemDocument26 pagesAUT Validation Report For Phased Array AUT Systemaldeanucu100% (1)
- Eddy Current Maths PDFDocument195 pagesEddy Current Maths PDFaldeanucuNo ratings yet
- Study of Defect Characteristics Essential For ET UT RTDocument58 pagesStudy of Defect Characteristics Essential For ET UT RTaldeanucu100% (2)
- SKI Report 2004 - 19 PDFDocument24 pagesSKI Report 2004 - 19 PDFaldeanucuNo ratings yet
- DMTA 20029 01EN - Rev - A TomoView - 210 User PDFDocument504 pagesDMTA 20029 01EN - Rev - A TomoView - 210 User PDFaldeanucu100% (1)
- OmniSX - MX2 - Training - 16J TOFD Flaw Sizing and CharacterizationDocument35 pagesOmniSX - MX2 - Training - 16J TOFD Flaw Sizing and Characterizationaldeanucu100% (3)
- OmniScan SX MX2 TOFD Acquisition GuideDocument12 pagesOmniScan SX MX2 TOFD Acquisition Guidealdeanucu100% (1)
- Scanner HydroFORM - en PDFDocument2 pagesScanner HydroFORM - en PDFaldeanucuNo ratings yet
- Ultrasonic Testing of Steel CastingDocument38 pagesUltrasonic Testing of Steel CastingPARK, SANGYEOLNo ratings yet
- Phased Array Ultrasonic Technology 2nd Edition - SampleDocument26 pagesPhased Array Ultrasonic Technology 2nd Edition - Samplealdeanucu67% (3)
- Grain Refinement of Austenitic SS Weld To Facilitate UTDocument178 pagesGrain Refinement of Austenitic SS Weld To Facilitate UTaldeanucuNo ratings yet
- MX2 Training Program 14G Phased Array Analysis-Flaw CharaterizationDocument32 pagesMX2 Training Program 14G Phased Array Analysis-Flaw Charaterizationaldeanucu100% (1)
- New NFT PDFDocument2 pagesNew NFT PDFaldeanucuNo ratings yet
- Austenitic Weld Inspection With EMAT Phased Array PDFDocument10 pagesAustenitic Weld Inspection With EMAT Phased Array PDFaldeanucuNo ratings yet
- Dmta041 01en B Tomoscan Focus LT User Manual enDocument0 pagesDmta041 01en B Tomoscan Focus LT User Manual enaldeanucuNo ratings yet
- Qualification Process For Phased Array UT Using DNV RP-F118Document12 pagesQualification Process For Phased Array UT Using DNV RP-F118aztec20100% (1)
- 1994 Belgian UT Evaluation of The PISC III Austenitic Stainless Steel SpecimensDocument20 pages1994 Belgian UT Evaluation of The PISC III Austenitic Stainless Steel SpecimensaldeanucuNo ratings yet
- Ra06 - p044 067 Efda VesselDocument24 pagesRa06 - p044 067 Efda VesselaldeanucuNo ratings yet
- Study of Defect Characteristics Essential For ET UT RTDocument58 pagesStudy of Defect Characteristics Essential For ET UT RTaldeanucu100% (2)
- 389 DumasDocument8 pages389 DumasaldeanucuNo ratings yet
- Ultrasonic Time of Flight Diffraction Technique For Weld Defects A ReviewDocument9 pagesUltrasonic Time of Flight Diffraction Technique For Weld Defects A ReviewaldeanucuNo ratings yet
- 3d Weld Visualization Using Manual Phased ArrayDocument10 pages3d Weld Visualization Using Manual Phased ArrayaldeanucuNo ratings yet
- 02 - Kta-3201 4 PDFDocument26 pages02 - Kta-3201 4 PDFaldeanucu100% (1)
- Eddy Current Tubing DentingDocument54 pagesEddy Current Tubing Dentingaldeanucu100% (3)
- Phased Array PDFDocument1 pagePhased Array PDFaldeanucuNo ratings yet
- Catalog 2008ECT Tubing PDFDocument45 pagesCatalog 2008ECT Tubing PDFaldeanucuNo ratings yet
- Catalog 2008ECT Tubing PDFDocument45 pagesCatalog 2008ECT Tubing PDFaldeanucuNo ratings yet
- CH-314 Lab Experiment 3Document3 pagesCH-314 Lab Experiment 3Fatima tahirNo ratings yet
- Boilers & FurnacesDocument88 pagesBoilers & Furnacesnrnak0% (1)
- EET 3153: Physical Electronics: Job Kerosi EmailDocument77 pagesEET 3153: Physical Electronics: Job Kerosi EmailOdhiambo MeshackNo ratings yet
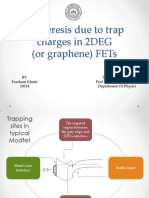
- Hysteresis Due To Trap Charges in 2deg (Or Graphene) FetsDocument17 pagesHysteresis Due To Trap Charges in 2deg (Or Graphene) FetsPrashant KhatriNo ratings yet
- Adsorption of VOCDocument24 pagesAdsorption of VOCMuhammad Farhan MokhtarNo ratings yet
- Usp (1118) Monitoring Devices-Time, Temperature, and HumidityDocument3 pagesUsp (1118) Monitoring Devices-Time, Temperature, and HumiditySara OchoaNo ratings yet
- Liquid Flow Rate For FlowmetersDocument4 pagesLiquid Flow Rate For Flowmetersابوالحروف العربي ابوالحروفNo ratings yet
- Units and Unit Conversions Mcgraw HillDocument5 pagesUnits and Unit Conversions Mcgraw HillParvezNo ratings yet
- 2DOF System Free Vibration AnalysisDocument42 pages2DOF System Free Vibration Analysismohanrajjercy71No ratings yet
- Conservation of angular momentum examplesDocument4 pagesConservation of angular momentum examplesidraumrNo ratings yet
- Geology Lab ReportDocument2 pagesGeology Lab ReportSteve100% (1)
- Abstract - Fatigue Behavior in Strain Cycling in The Low and Intermediate Cycle RangeDocument55 pagesAbstract - Fatigue Behavior in Strain Cycling in The Low and Intermediate Cycle RangeZarra FaktNo ratings yet
- HeatDocument54 pagesHeatARNAV GOELNo ratings yet
- 5 Methods To Determine Preheat TemperatureDocument5 pages5 Methods To Determine Preheat TemperatureNapoleon DasNo ratings yet
- Models - Cfd.displacement VentilationDocument20 pagesModels - Cfd.displacement VentilationMarioNo ratings yet
- General Chemistry 2 Module 5Document3 pagesGeneral Chemistry 2 Module 5Jogie De GuiaNo ratings yet
- Radiography Methods for Ensuring Acceptable Image QualityDocument4 pagesRadiography Methods for Ensuring Acceptable Image QualityRavindra S. Jivani100% (1)
- Class X Physics Heat and Optics DocumentDocument111 pagesClass X Physics Heat and Optics DocumentsugothaaaNo ratings yet
- FukudaUF 4100Document2 pagesFukudaUF 4100Adijoyo PurwonegoroNo ratings yet
- 2014 WINTER Cryoquip Installation Tips and Considerations For Ambient Vaporizers1Document2 pages2014 WINTER Cryoquip Installation Tips and Considerations For Ambient Vaporizers1Kom NakNo ratings yet
- Thermodynamics Lab Report - Application of The Perfect Gas Laws in The Determination of Adiabatic Index of AirDocument9 pagesThermodynamics Lab Report - Application of The Perfect Gas Laws in The Determination of Adiabatic Index of Airqiaunus69% (13)
- Topic 1: Central Luzon State UniversityDocument29 pagesTopic 1: Central Luzon State UniversityZACK PHILIP AQUINONo ratings yet
- Tds-Ind-Gearz-Ep 052715Document2 pagesTds-Ind-Gearz-Ep 052715sebastianNo ratings yet
- Pulse-Echo Reflection Ultrasound InspectionDocument2 pagesPulse-Echo Reflection Ultrasound InspectionPradeep SiddhamNo ratings yet
- C StructDesign Bendapudi Feb10 (1) Part 1Document0 pagesC StructDesign Bendapudi Feb10 (1) Part 1Rubén MenaNo ratings yet
- ASTM A234-2011aDocument8 pagesASTM A234-2011aSam WeberNo ratings yet
- Challenger 3000 Parts ManualDocument52 pagesChallenger 3000 Parts ManualCristhian Aguilar100% (1)
- Advanced Gas Tanker TrainingDocument136 pagesAdvanced Gas Tanker TrainingPrassanna Venkatesh100% (2)
- Rock properties affecting conical pick performance and comparison of experimental and theoretical cutting resultsDocument38 pagesRock properties affecting conical pick performance and comparison of experimental and theoretical cutting resultsFranceth Castellanos BallesterosNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 5 out of 5 stars5/5 (2)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusFrom EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusRating: 4.5 out of 5 stars4.5/5 (2)
- Psychology Behind Mathematics - The Comprehensive GuideFrom EverandPsychology Behind Mathematics - The Comprehensive GuideNo ratings yet
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathFrom EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathRating: 5 out of 5 stars5/5 (1)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Math Magic: How To Master Everyday Math ProblemsFrom EverandMath Magic: How To Master Everyday Math ProblemsRating: 3.5 out of 5 stars3.5/5 (15)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- Assessment Prep for Common Core Mathematics, Grade 6From EverandAssessment Prep for Common Core Mathematics, Grade 6Rating: 5 out of 5 stars5/5 (1)