You might also like
- Principles of CAD CAM CAEDocument600 pagesPrinciples of CAD CAM CAEBob Benedict0% (1)
- Computer-Aided Analysis of Mechanisms Using ChExcelDocument53 pagesComputer-Aided Analysis of Mechanisms Using ChExcelAhmet FidanNo ratings yet
- Silo - Tips - Virtual Machine in Automation ProjectsDocument42 pagesSilo - Tips - Virtual Machine in Automation ProjectsHamzaNo ratings yet
- Altair's Student Guides - CAE and Design Optimisation - BasicsDocument69 pagesAltair's Student Guides - CAE and Design Optimisation - BasicsKFourMetrics100% (29)
- Anand Bhat PHD ThesisDocument202 pagesAnand Bhat PHD ThesisJuJuSmithNo ratings yet
- NI Mechatronics Machine Design GuideDocument46 pagesNI Mechatronics Machine Design GuideGautam TyagiNo ratings yet
- Principles of CAD/CAM/CAEDocument600 pagesPrinciples of CAD/CAM/CAEMuhammad Bilal87% (23)
- AutomotiveCockpitDesign2020 PDFDocument85 pagesAutomotiveCockpitDesign2020 PDFpetrishiaNo ratings yet
- Dinesh Chandra Verma Principles of Computer Systems and Network ManagementDocument266 pagesDinesh Chandra Verma Principles of Computer Systems and Network Managementedward djami100% (1)
- Altair's Student Guides - A Designer's Guide To Finite Element AnalysisDocument84 pagesAltair's Student Guides - A Designer's Guide To Finite Element AnalysisKFourMetrics100% (48)
- Model-Based Engineering for Complex Electronic SystemsFrom EverandModel-Based Engineering for Complex Electronic SystemsRating: 5 out of 5 stars5/5 (1)
- Wa0036Document41 pagesWa0036hemacrcNo ratings yet
- AnsysDocument46 pagesAnsysapi-3719538100% (9)
- Design, Development and Performance Evaluation of Multiprocessor Systems On FpgaDocument161 pagesDesign, Development and Performance Evaluation of Multiprocessor Systems On FpgagurumbhatNo ratings yet
- Project Proposal On Online Notice BoardDocument33 pagesProject Proposal On Online Notice BoardAyush Shrestha75% (48)
- A Conceptual Cost Comparison Study Between Alberta and Overseas Module - Sedaghat - Nassim - 201609 - MSCDocument238 pagesA Conceptual Cost Comparison Study Between Alberta and Overseas Module - Sedaghat - Nassim - 201609 - MSCcmkangNo ratings yet
- Components and Generative ProgrammingDocument18 pagesComponents and Generative ProgrammingSavi AnalizeNo ratings yet
- Advanced Computer-Aided Fixture DesignFrom EverandAdvanced Computer-Aided Fixture DesignRating: 5 out of 5 stars5/5 (1)
- The Multibody Systems Approach to Vehicle DynamicsFrom EverandThe Multibody Systems Approach to Vehicle DynamicsRating: 5 out of 5 stars5/5 (2)
- Book-Shop Automation SystemDocument17 pagesBook-Shop Automation Systemamit_krishnawarish60% (10)
- Design Interview BookDocument6 pagesDesign Interview BookNair YadukrishnanNo ratings yet
- Inventory Management System For AstuDocument100 pagesInventory Management System For Astuabelasnake08No ratings yet
- Human Resource Management System Using RFIDDocument332 pagesHuman Resource Management System Using RFIDEngrMuzammalJanjua67% (3)
- Product Performance Evaluation using CAD/CAE: The Computer Aided Engineering Design SeriesFrom EverandProduct Performance Evaluation using CAD/CAE: The Computer Aided Engineering Design SeriesNo ratings yet
- Fixture Design System With Automatic Generation and Modification of Complementary Elements For Modular FixturesDocument21 pagesFixture Design System With Automatic Generation and Modification of Complementary Elements For Modular FixturessamNo ratings yet
- Product Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesFrom EverandProduct Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesRating: 4 out of 5 stars4/5 (4)
- Finite Element Analysis for Design Engineers, Second EditionFrom EverandFinite Element Analysis for Design Engineers, Second EditionNo ratings yet
- ANSYS Report PDFDocument17 pagesANSYS Report PDFsai leela mohanNo ratings yet
- Machine Design by E.L. WallaceDocument186 pagesMachine Design by E.L. Wallacenavodit14No ratings yet
- Example Literature Review Mechanical EngineeringDocument6 pagesExample Literature Review Mechanical Engineeringc5eakf6zNo ratings yet
- Ubeda - Control PID para Brazo RobóticoDocument50 pagesUbeda - Control PID para Brazo RobóticoLê Chấp DuyNo ratings yet
- Phase 1Document18 pagesPhase 1Usman ZahidNo ratings yet
- Thesis Abhishek MishraDocument45 pagesThesis Abhishek Mishrasuperiorsambrial examcellNo ratings yet
- Krishnal Report On AdasDocument109 pagesKrishnal Report On AdasKrishnal NairNo ratings yet
- Diss SchwarzDocument130 pagesDiss SchwarzMohamed AdelNo ratings yet
- Apeco Business Processes Improvement in Aris Software: Ardo PermDocument86 pagesApeco Business Processes Improvement in Aris Software: Ardo PermEden Solutions LtdNo ratings yet
- Patterns in Action 4.5Document98 pagesPatterns in Action 4.5pablo@No ratings yet
- Urdu Text To Image SynthesisDocument18 pagesUrdu Text To Image SynthesisMuhammad Sheharyar MohsinNo ratings yet
- Master Thesis Uzsoki Mark FinalDocument102 pagesMaster Thesis Uzsoki Mark FinalMark UzsokiNo ratings yet
- Ke 10Document272 pagesKe 10Mohamed AdelNo ratings yet
- Introduction To Formal Hardware Verification-Springer-Verlag Berlin Heidelberg (1999)Document308 pagesIntroduction To Formal Hardware Verification-Springer-Verlag Berlin Heidelberg (1999)Sucharita PriyadarshiniNo ratings yet
- Online Trading System Case Study Using FORMDocument99 pagesOnline Trading System Case Study Using FORMibbuandNo ratings yet
- NATMAPreportDocument23 pagesNATMAPreportVovManNo ratings yet
- Understanding Server-to-Server Traffic in Data CentersDocument46 pagesUnderstanding Server-to-Server Traffic in Data CentersCliff6948No ratings yet
- C++ Concepte PDFDocument49 pagesC++ Concepte PDFLaura Diana PisicaNo ratings yet
- MACHINE DESIGN PROJECT Lecture NoteDocument21 pagesMACHINE DESIGN PROJECT Lecture Noteatkilt mechNo ratings yet
- Buku Referensi Anas 4 - Matrix Stiffness MethodDocument148 pagesBuku Referensi Anas 4 - Matrix Stiffness MethodHilda MaulizaNo ratings yet
- Relation Between Robotic Arm Components, Performance and CostDocument62 pagesRelation Between Robotic Arm Components, Performance and CostTechs Solutions RobotsNo ratings yet
- Machine DesignDocument520 pagesMachine DesignMohan Varkey100% (2)
- JapfDocument280 pagesJapfartNo ratings yet
- Daa Report-1Document21 pagesDaa Report-1Amresh KohliNo ratings yet
- Obtimum Cross DockingDocument104 pagesObtimum Cross DockingTsendayush BayanmunkhNo ratings yet
- Demystifying Numerical Models: Step-by Step Modeling of Engineering SystemsFrom EverandDemystifying Numerical Models: Step-by Step Modeling of Engineering SystemsRating: 2 out of 5 stars2/5 (1)
- Engineering Simulation and its Applications: Algorithms and Numerical MethodsFrom EverandEngineering Simulation and its Applications: Algorithms and Numerical MethodsNo ratings yet
- Manufacturing Facilities Design & Material Handling: Sixth EditionFrom EverandManufacturing Facilities Design & Material Handling: Sixth EditionNo ratings yet
- Meccan Is MoDocument1 pageMeccan Is MomariomatoNo ratings yet
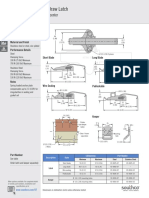
- Adjustable V4 Draw LatchDocument2 pagesAdjustable V4 Draw LatchmariomatoNo ratings yet
- Flexmove Plastic Slat Conveyors SystemDocument16 pagesFlexmove Plastic Slat Conveyors SystemmariomatoNo ratings yet
- Cure For All Advanced CancersDocument634 pagesCure For All Advanced Cancerse33aticNo ratings yet
- Notes MechV PDFDocument21 pagesNotes MechV PDFzamburittiNo ratings yet
- Finite Element AnalysisDocument70 pagesFinite Element AnalysisDinesh PerumalsamyNo ratings yet
- Theory of MachinesDocument41 pagesTheory of MachinesC V CHANDRASHEKARA75% (4)
- Fundamentals of Machine Component Design - Student Solutions ManualDocument137 pagesFundamentals of Machine Component Design - Student Solutions ManualAmanda Silva82% (28)
- STRESS ANALYSIS and FATIGUE of Welded StructuresDocument20 pagesSTRESS ANALYSIS and FATIGUE of Welded Structuresmatteo_1234100% (1)
- Full Text DocumentDocument62 pagesFull Text Documentvinoo13No ratings yet
- Recent Advances in Practical Finite Element AnalysisDocument11 pagesRecent Advances in Practical Finite Element AnalysismariomatoNo ratings yet
- Bolt PretensionDocument6 pagesBolt Pretensionsujayan2005No ratings yet
- Effective Modal Masses: 1 AbstractDocument4 pagesEffective Modal Masses: 1 AbstractmariomatoNo ratings yet
- 155710Document56 pages155710mariomatoNo ratings yet
- 155710Document56 pages155710mariomatoNo ratings yet
- Unit 25 Essential Working Practices in Vehicle TechnologyDocument10 pagesUnit 25 Essential Working Practices in Vehicle TechnologymariomatoNo ratings yet
- CETE ScilabTEC2013Document30 pagesCETE ScilabTEC2013mariomatoNo ratings yet
- Methods of Nonlinear Random Vibration Analysis: AbstractDocument27 pagesMethods of Nonlinear Random Vibration Analysis: AbstracttuanphamcktNo ratings yet
- Beam FEM Ss AxialDocument10 pagesBeam FEM Ss AxialmariomatoNo ratings yet
- Introduction To Finite Element ModelingDocument5 pagesIntroduction To Finite Element Modelingmastura_rahim_3No ratings yet
- Aikido Shudokan Emag 2012Document61 pagesAikido Shudokan Emag 2012mariomato100% (2)
- EQE Ceresa EtalDocument22 pagesEQE Ceresa EtalmariomatoNo ratings yet
- Guideline For The Assessment of Existing StructuresDocument48 pagesGuideline For The Assessment of Existing StructuresAnonymous q0irDXlWAmNo ratings yet
- WangDocument18 pagesWangnagarajucruxNo ratings yet
- Fatigue Life Evaluation of Mechanical Components Using Vibration Fatigue Analysis TechniqueDocument7 pagesFatigue Life Evaluation of Mechanical Components Using Vibration Fatigue Analysis TechniquemariomatoNo ratings yet
- Weld Design by FEADocument11 pagesWeld Design by FEAAdarsh D. KarkiNo ratings yet
- 9554327Document254 pages9554327mariomatoNo ratings yet
- Solidworks Simulation WeldsDocument38 pagesSolidworks Simulation Weldsfiuto_rights_1404802100% (2)
- Qualcomm LTE Performance & Challenges 09-01-2011Document29 pagesQualcomm LTE Performance & Challenges 09-01-2011vembri2178100% (1)
- Centrifugal Compressor Operation and MaintenanceDocument16 pagesCentrifugal Compressor Operation and MaintenanceNEMSNo ratings yet
- Oracle Data Integration - An Overview With Emphasis in DW AppDocument34 pagesOracle Data Integration - An Overview With Emphasis in DW Appkinan_kazuki104No ratings yet
- BetaDocument16 pagesBetaAkshita Saxena100% (2)
- Excel Dynamic Arrays: Department Item Quantity Price Total $Document5 pagesExcel Dynamic Arrays: Department Item Quantity Price Total $Bilal Hussein SousNo ratings yet
- WPS Office 2016Document22 pagesWPS Office 2016Muhammad Aliff SyukriNo ratings yet
- AMD OverDrive Utility 4.3.1.0698 Release NotesDocument1 pageAMD OverDrive Utility 4.3.1.0698 Release Notesbayu_gendeng666No ratings yet
- Tesla Regen, Brakes and Sudden AccelerationDocument66 pagesTesla Regen, Brakes and Sudden AccelerationmartinvvNo ratings yet
- Dynamic model of manipulatorsDocument20 pagesDynamic model of manipulatorsbalkyderNo ratings yet
- F (X, Y) Sin (Xy) + X LN (Y) Find F at (0, )Document9 pagesF (X, Y) Sin (Xy) + X LN (Y) Find F at (0, )muhammad abrarNo ratings yet
- Valve Actuator Data SheetDocument1 pageValve Actuator Data SheetRob StorrowNo ratings yet
- Delta VFD E Series User ManualDocument399 pagesDelta VFD E Series User ManualTendai AlfaceNo ratings yet
- Toyo ML210 thread cutting gear assembly drawingsDocument12 pagesToyo ML210 thread cutting gear assembly drawingsiril anwarNo ratings yet
- Practical-10: AIM: Installing Active Directory and Creating AD ObjectsDocument4 pagesPractical-10: AIM: Installing Active Directory and Creating AD ObjectsnisuNo ratings yet
- Enzyme Inhibition and ToxicityDocument12 pagesEnzyme Inhibition and ToxicityDaniel OmolewaNo ratings yet
- Silo Cement CalculationDocument11 pagesSilo Cement CalculationFikriaraz AfifNo ratings yet
- The Order of Historical Time: The Longue Durée and Micro-HistoryDocument17 pagesThe Order of Historical Time: The Longue Durée and Micro-HistoryGeorgia KoutaNo ratings yet
- Regeln Map 2Document2 pagesRegeln Map 2bruno.wetzelNo ratings yet
- Ce010 601 Design of Steel Structures Ce PDFDocument5 pagesCe010 601 Design of Steel Structures Ce PDFPrakash rubanNo ratings yet
- Unit 10Document18 pagesUnit 10ChaithraMalluNo ratings yet
- NEC Article 250Document42 pagesNEC Article 250unknown_3100% (1)
- Fundamentals of Neural Networks by Laurene FausettDocument476 pagesFundamentals of Neural Networks by Laurene Fausettsivakumar89% (18)
- Public Key Cryptography: S. Erfani, ECE Dept., University of Windsor 0688-558-01 Network SecurityDocument7 pagesPublic Key Cryptography: S. Erfani, ECE Dept., University of Windsor 0688-558-01 Network SecurityAbrasaxEimi370No ratings yet
- SIEMENS-7SA522 Setting CalculationDocument20 pagesSIEMENS-7SA522 Setting Calculationnaran19794735No ratings yet
- Mitsubishi diesel forklifts 1.5-3.5 tonnesDocument2 pagesMitsubishi diesel forklifts 1.5-3.5 tonnesJoniNo ratings yet
- Ms-Dos Device Drivers: Device Drivers Are The That in File atDocument13 pagesMs-Dos Device Drivers: Device Drivers Are The That in File atJass GillNo ratings yet
- Ey-H3l Yh1576Document44 pagesEy-H3l Yh1576jorgeNo ratings yet
- DC Machines Chapter SummaryDocument14 pagesDC Machines Chapter SummaryMajad RazakNo ratings yet
- Self Report QuestionnaireDocument6 pagesSelf Report QuestionnaireMustafa AL ShlashNo ratings yet
- 171 - New CAN-filter For Cran Com. SCS4 and MidrangeDocument4 pages171 - New CAN-filter For Cran Com. SCS4 and MidrangeMohamed ElnagdyNo ratings yet