You might also like
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsFrom EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNo ratings yet
- Tracking and Dynamic Balancing of Rotor BladesDocument6 pagesTracking and Dynamic Balancing of Rotor Bladesfitasmounir100% (1)
- Rotor Blade Static Balancing - Art or ScienceDocument16 pagesRotor Blade Static Balancing - Art or ScienceT/ROX100% (1)
- Rotor Track and Balance ImprovementsDocument9 pagesRotor Track and Balance ImprovementsEric BechhoeferNo ratings yet
- Improved Rotor Track and Balance Performance Using An Expert SystemDocument8 pagesImproved Rotor Track and Balance Performance Using An Expert SystemEric BechhoeferNo ratings yet
- RADS-At Student Training GuideDocument58 pagesRADS-At Student Training Guiderobiny100% (10)
- Helicopter PPT 1Document18 pagesHelicopter PPT 1Sunil PanwarNo ratings yet
- FAA APPROVED BHT-412-FM-4 LIMITATIONSDocument24 pagesFAA APPROVED BHT-412-FM-4 LIMITATIONSPiyush GoelNo ratings yet
- Helicopter Swashplate MechanismDocument3 pagesHelicopter Swashplate MechanismRaghav SachdevaNo ratings yet
- EC130 B4 Technical DataDocument30 pagesEC130 B4 Technical DataBruno Alonso PachecoNo ratings yet
- AFCSDocument84 pagesAFCSLeilson ArouchaNo ratings yet
- Kingair b200gtDocument8 pagesKingair b200gtDid Yeah100% (1)
- AS350B3-tech Data 2009Document70 pagesAS350B3-tech Data 2009trunNo ratings yet
- 0001 Bo105 CB CBSDocument2 pages0001 Bo105 CB CBSIan Sinclair21% (14)
- Beechcraft Service Bulletin Master Index GuideDocument188 pagesBeechcraft Service Bulletin Master Index GuideEstevam Gomes de Azevedo100% (1)
- Rotor Track BalanceDocument7 pagesRotor Track BalanceEric BechhoeferNo ratings yet
- 412 B1.3 Bell Training ManualDocument276 pages412 B1.3 Bell Training ManualJan Kneissl100% (1)
- Agusta AB139 Vibration Analysis and AttenuationDocument9 pagesAgusta AB139 Vibration Analysis and AttenuationŞükrü ÇarkçiNo ratings yet
- BO 105 F Flight Control System Chapter 4Document108 pagesBO 105 F Flight Control System Chapter 4ALEXANDER100% (3)
- HeliSAS RFMS Bell 407 SR2344LADocument16 pagesHeliSAS RFMS Bell 407 SR2344LAfiskitNo ratings yet
- PT6 Training ManualDocument64 pagesPT6 Training ManualAnderson Guimarães100% (2)
- Model 250 C40BDocument2 pagesModel 250 C40Bsnappish1No ratings yet
- Bell 429 ProdSpecsDocument52 pagesBell 429 ProdSpecsJan Thys100% (1)
- Manual For Ecureuil HelicopterDocument63 pagesManual For Ecureuil Helicoptershahidcarlos100% (2)
- Helicopter Assignment Helicopter Systems: Main Rotor SystemDocument10 pagesHelicopter Assignment Helicopter Systems: Main Rotor SystemMarc LumabanNo ratings yet
- Vibration Analysis and Rotor Balancing GuideDocument84 pagesVibration Analysis and Rotor Balancing GuideLuis HernandezNo ratings yet
- Section 14 - Autopilot PDFDocument23 pagesSection 14 - Autopilot PDFrobbertmdNo ratings yet
- 350B3 09 101 02Document72 pages350B3 09 101 02sbayersaikhan50% (4)
- The Australian Air Transport Pilot Licence (Helicopter) S76 Performance and Operations HandbookDocument75 pagesThe Australian Air Transport Pilot Licence (Helicopter) S76 Performance and Operations Handbookgreg mNo ratings yet
- R44 Maintenance Manual - CompleteDocument643 pagesR44 Maintenance Manual - CompleteCraig Martin75% (4)
- 412 Maintenance Manual Vol 2 Chapter 18 Vibration and Noise PDFDocument110 pages412 Maintenance Manual Vol 2 Chapter 18 Vibration and Noise PDFAmbas NelusNo ratings yet
- Accident Investigation: Roiis-RoyceDocument53 pagesAccident Investigation: Roiis-RoyceMariusz Czajkowski100% (1)
- 139 HumsDocument116 pages139 HumsAlaa Mortada100% (3)
- TCDS 412 BellDocument19 pagesTCDS 412 Belllocanahidayat3989No ratings yet
- Polar coordinate balance chart made simpleDocument27 pagesPolar coordinate balance chart made simplerobinyNo ratings yet
- Pt6t Gearbox PDFDocument117 pagesPt6t Gearbox PDF13421301508No ratings yet
- 412ep PDFDocument52 pages412ep PDFADRAI KHARAL100% (1)
- Cheyenne - APDocument14 pagesCheyenne - APtumb100% (1)
- FAA Type Certificate Data Sheet for Airbus Helicopters AS350 SeriesDocument21 pagesFAA Type Certificate Data Sheet for Airbus Helicopters AS350 Serieskike002No ratings yet
- Ec130b4-Tech Data 2009Document58 pagesEc130b4-Tech Data 2009Fran Garita100% (1)
- BO105 Maintenance ManualDocument2,532 pagesBO105 Maintenance ManualДенис Мешков100% (4)
- AgustaWestland AW 139 SN 41008 Reg M OLJMDocument3 pagesAgustaWestland AW 139 SN 41008 Reg M OLJMPedro TaverasNo ratings yet
- Vibration Analysis BasicsDocument132 pagesVibration Analysis BasicsrobinyNo ratings yet
- As350b3 VemdDocument40 pagesAs350b3 VemdRussell GouldenNo ratings yet
- PRATT & WHITNEY CANADA PROPELLER GOVERNOR MANUALDocument12 pagesPRATT & WHITNEY CANADA PROPELLER GOVERNOR MANUALMichael Quintero100% (1)
- Helicopter Weight and BalanceDocument4 pagesHelicopter Weight and BalanceAbdul Qadeer Khan100% (1)
- 5-BO105 Initial Hydraulic SystemDocument29 pages5-BO105 Initial Hydraulic SystemTitvs Flavivs Vespasianvs50% (4)
- Hawker 800xp SpecsDocument5 pagesHawker 800xp SpecsCooper L100% (2)
- Title Page - King Air 200 SeriesDocument3 pagesTitle Page - King Air 200 SeriessergioNo ratings yet
- Spec EC - 130 B4Document6 pagesSpec EC - 130 B4Niken PratiwiNo ratings yet
- Bell 212 - Technical Ground PDFDocument75 pagesBell 212 - Technical Ground PDFemdcad3790100% (1)
- GNS-XLS Operator's Manual Rev8 PDFDocument415 pagesGNS-XLS Operator's Manual Rev8 PDFSergey D100% (1)
- Questionarie-Arriel 2B&2B1Document13 pagesQuestionarie-Arriel 2B&2B1AbelSinglei100% (2)
- TM 55-1520-210-PMD PDFDocument58 pagesTM 55-1520-210-PMD PDFEagle1968100% (1)
- Unmaintained Copy For Information Only: AW139-QRHDocument248 pagesUnmaintained Copy For Information Only: AW139-QRHsuperdby100% (1)
- 14 Beech PT6 AutoDocument11 pages14 Beech PT6 AutoAliken James100% (1)
- Canadair Chauenqer: Operating ManualDocument47 pagesCanadair Chauenqer: Operating ManualgerezairNo ratings yet
- Section 3: Canaaair ChanenqerDocument19 pagesSection 3: Canaaair ChanenqergerezairNo ratings yet
- Canadair Challenger Operating Manual Section 1Document35 pagesCanadair Challenger Operating Manual Section 1gerezairNo ratings yet
- Canaaair Chaiiencjer: Operating Manual PSP 606Document10 pagesCanaaair Chaiiencjer: Operating Manual PSP 606gerezairNo ratings yet
- AVIALL BendixKing 2018 List Price CatalogDocument90 pagesAVIALL BendixKing 2018 List Price CataloggerezairNo ratings yet
- Faa Flight Standarization 560 550 Board Cessna 500Document53 pagesFaa Flight Standarization 560 550 Board Cessna 500gerezairNo ratings yet
- GFC 700 Autopilot Troubleshooting GuideDocument12 pagesGFC 700 Autopilot Troubleshooting GuidegerezairNo ratings yet
- Challenger 601 ChecklistDocument126 pagesChallenger 601 Checklistgerezair100% (2)
- HE Power Packs: Flexible Hydraulic Systems for Demanding ApplicationsDocument40 pagesHE Power Packs: Flexible Hydraulic Systems for Demanding ApplicationsgerezairNo ratings yet
- Canadair Chahencjer: Operating Manual PSP 606Document22 pagesCanadair Chahencjer: Operating Manual PSP 606gerezairNo ratings yet
- Maintenance Records for Aircraft 500-0158Document41 pagesMaintenance Records for Aircraft 500-0158gerezairNo ratings yet
- Clarification of Part 91 Inspection RequirementsDocument7 pagesClarification of Part 91 Inspection RequirementsgerezairNo ratings yet
- AT520JK Users ManualDocument15 pagesAT520JK Users ManualgerezairNo ratings yet
- 2008 Computer Testing Supplement For IA Testing Ct-8080-8d - WebDocument675 pages2008 Computer Testing Supplement For IA Testing Ct-8080-8d - Webgerezair100% (1)
- Airline Weekly Jan 2017 Issue 607Document12 pagesAirline Weekly Jan 2017 Issue 607gerezairNo ratings yet
- ProAdvantage Brochure2014Document12 pagesProAdvantage Brochure2014gerezairNo ratings yet
- Surface SealDocument0 pagesSurface SealgerezairNo ratings yet
- SblistDocument12 pagesSblistgerezairNo ratings yet
- O Ring SizesDocument8 pagesO Ring SizesgerezairNo ratings yet
- LR25 CockpitReferenceHandbookDocument592 pagesLR25 CockpitReferenceHandbookChiragCharania100% (3)
- Beech Pre PurchaseDocument6 pagesBeech Pre PurchasegerezairNo ratings yet
- AgreementDocument1 pageAgreementgerezairNo ratings yet
- Von Klip Tip Cs PropellerDocument12 pagesVon Klip Tip Cs PropellergerezairNo ratings yet
- Adhesives Sealants Cessna PartsDocument2 pagesAdhesives Sealants Cessna PartsgerezairNo ratings yet
- WashersDocument2 pagesWashersgerezairNo ratings yet
- Orbitec Vacuum ReferenceDocument1 pageOrbitec Vacuum ReferencegerezairNo ratings yet
- Orbitec Vacuum ReferenceDocument1 pageOrbitec Vacuum ReferencegerezairNo ratings yet
- BE90 BprocDocument14 pagesBE90 BprocgerezairNo ratings yet
- Cessna 680 Sovereign StudyGuideDocument56 pagesCessna 680 Sovereign StudyGuidegerezair86% (7)
- Titanvene Lldpe-LctnDocument4 pagesTitanvene Lldpe-LctnRifan HarfaniNo ratings yet
- Husky Air Assignment 5 and 6Document15 pagesHusky Air Assignment 5 and 6varunkalra6No ratings yet
- Environmental Quality Control of Emission From Diesel Engines Regulations 1996 - P.U.a 429-96Document22 pagesEnvironmental Quality Control of Emission From Diesel Engines Regulations 1996 - P.U.a 429-96scribdledeeNo ratings yet
- Indian Standards As On 17.01.2004 LatestDocument19 pagesIndian Standards As On 17.01.2004 LatestSaravana KumarNo ratings yet
- Udayanandan, Notes On Tensors PDFDocument56 pagesUdayanandan, Notes On Tensors PDFhristos314No ratings yet
- Tek 10-03Document4 pagesTek 10-03Thai DamNo ratings yet
- RT 50Document2 pagesRT 50valentin prouteauNo ratings yet
- Insulation Castables Application Procedure - Rev-2 - PDFDocument10 pagesInsulation Castables Application Procedure - Rev-2 - PDFNatarajan MurugesanNo ratings yet
- Boiler MaintenanceDocument144 pagesBoiler Maintenanceaziz100% (2)
- Electricity Scavenger HuntDocument1 pageElectricity Scavenger HuntksonicoNo ratings yet
- Maxxi Report FinalDocument7 pagesMaxxi Report FinalDepanshu Gola100% (1)
- Standardization of Welding ElectrodesDocument8 pagesStandardization of Welding ElectrodesAqsa BanoNo ratings yet
- Shop Manual WA380-3LE SN A50001Document758 pagesShop Manual WA380-3LE SN A50001Eliecer godoy100% (2)
- Troubleshoot Microlab 600 DiluterDocument3 pagesTroubleshoot Microlab 600 DiluterAkmal RakhmadiNo ratings yet
- Brandt M FR Btd500blnDocument74 pagesBrandt M FR Btd500blnStéphane JoussetNo ratings yet
- 2019 Zeta Zwheel Catalogs PDFDocument30 pages2019 Zeta Zwheel Catalogs PDFSales One - Plusgrow - IndiaNo ratings yet
- 1998 CAT 3126 Oper & Maint ManualDocument93 pages1998 CAT 3126 Oper & Maint Manualbatuhan kılıç100% (2)
- 2010 Xstrata VOD Implementation - BartschDocument35 pages2010 Xstrata VOD Implementation - BartschFlávia GomesNo ratings yet
- Online Quiz System DocumentationDocument92 pagesOnline Quiz System DocumentationSultan Aiman100% (1)
- DseDocument20 pagesDsebrawijaya100% (1)
- Metronidazole AnalysisDocument5 pagesMetronidazole AnalysisHendri WasitoNo ratings yet
- HW03 5ad S19 PDFDocument2 pagesHW03 5ad S19 PDFbobNo ratings yet
- Company Profile: How Aristagloves Became a Leader in Personal Protective EquipmentDocument16 pagesCompany Profile: How Aristagloves Became a Leader in Personal Protective EquipmentNissaaNo ratings yet
- BPO2-Module 9 PROJECT PLANDocument16 pagesBPO2-Module 9 PROJECT PLANJudame Charo ZozobradoNo ratings yet
- Solve Process Problems Quickly with Simulation TrainingDocument6 pagesSolve Process Problems Quickly with Simulation TrainingAnonymous qPt2MHzXTNo ratings yet
- DESIGN II - ChemTran General Reference GuideDocument332 pagesDESIGN II - ChemTran General Reference GuideDebabrata MitraNo ratings yet
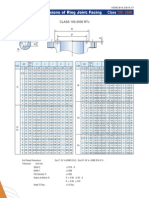
- RTJ Dimension ASME B16.5/B16.47Document1 pageRTJ Dimension ASME B16.5/B16.47parayilomer0% (1)
- As 2560.2.1-2003 Sports Lighting Specific Applications - Lighting For Outdoor TennisDocument7 pagesAs 2560.2.1-2003 Sports Lighting Specific Applications - Lighting For Outdoor TennisSAI Global - APAC0% (1)
- UDR MANUFACTURE ManufacturesDocument8 pagesUDR MANUFACTURE ManufacturesQuadri Consultancy ServicesNo ratings yet
- Purushothaman.V Head-Technical 9500118390: Kind Attn: Ln. RDocument9 pagesPurushothaman.V Head-Technical 9500118390: Kind Attn: Ln. RsramkmNo ratings yet