Professional Documents
Culture Documents
Éolienne
Uploaded by
Ben FahOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Éolienne
Uploaded by
Ben FahCopyright:
Available Formats
Ecole Nationale Suprieure dElectrotechnique, dElectronique, dInformatique,
dHydraulique et des Tlcommunications
Dpartement Gnie Electrique et Automatique
RAPPORT DE STAGE
DE FIN DETUDES
ETUDE THEORIQUE DUN
NOUVEAU RESEAU DE SECOURS
POUR LAERONAUTIQUE
ANDONI URTASUN ERBURU
Du 15/03/2010 au 17/09/2010
Tuteur Sogeti : Nicolas Dodane
Tutrice ENSEEIHT : Maria David
-Confidentiel-
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun
AVANT PROPOS
Le rapport de stage de fin dtudes prsent dans ce texte a t ralis dans le cadre de ma dernire anne de
formation dingnieur lcole ENSEEIHT (Ecole Nationale Suprieure dElectrotechnique, dElectronique, DInformatique,
DHydraulique et des Tlcommunications). Il sest droul du 15 Mars au 17 Septembre 2010, des six dernier mois de mon
anne dErasmus en France et il validera le diplme de Master Recherche en Gnie Electrique.
Le stage a t ralis au sein de Sogeti High Tech, une entreprise de prestation de service dans le secteur de
laronautique Toulouse. Lagence Simulation de Sogeti High Tech est implante au pied des pistes datterrissage de
Blagnac depuis de nombreuses annes et collabore avec lensemble des acteurs du secteur aronautique europen. Cette
socit dveloppe continuellement les comptences de ses collaborateurs, pour garder une place privilgie sur le march
du secteur.
Jai effectu mon stage au sein du ple Optimisation Blagnac, sous la direction de William Belloc et de mon
responsable direct Nicolas Dodane. Cette quipe travaille pour diffrents clients de diffrents secteurs, et son rle est de
raliser des missions bases sur la construction de mthodes de calculs, de plans dexpriences, de chane doptimisation
ou encore de rseaux de neurones.
Je voudrais faire apparatre dans ce texte les personnes qui mont aid pendant la priode de ce stage. Je tiens
remercier, tout dabord Nicolas Dodane, mon matre de stage, membre du ple Optimisation chez Sogeti High Tech, ainsi
que mes collaborateurs Frdric Coll, Emmanuel Corratge, Olivier Deslandes, Benoit Labeyrie, Clment Lefranc, Pierre-Yves
Meyer, Jeremy Ozog, Henri Pascal-Jenny et Rony Tjioe Chung pour leur disponibilit et amabilit pendant mon stage.
Je voudrais ensuite remercier toutes les personnes qui mont accueilli au sein de lentreprise et surtout toutes les
personnes que jai rencontres Toulouse, qui mont fait passer des moments magnifiques et qui ont russi faire de
Toulouse un autre chez moi.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun
SOGETI HIGH TECH
UNE FILIALE DU GROUP CAPGEMINI
Le groupe franais Capgemini est un fournisseur mondial de services de conseil, de technologies et dinfogrance. Il
occupe une place de leader sur ce march en France et est ct la bourse de Paris au CAC40. Le groupe est aujourdhui
implant dans 15 pays, avec plus de 200 bureaux locaux pour un chiffre daffaire annuel de 1.5Bn (au 31 Dcembre 2007).
Sogeti est issue du rachat par Capgemini de Transiciel Technologies en 2004. Lentreprise rsultante a t rebaptise
Sogeti-Transiciel, pour devenir Sogeti en janvier 2006. La vocation de Sogeti est daccompagner les entreprises et
organismes publics dans lvolution des performances de leurs systmes dinformation et dans la mise en uvre de projets
industriels de haute technologie.
Figure 1 : Organisation du Groupe Capgemini
UNE ORGANISATION PAR CORPS DE METIER
Sogeti est aujourdhui la premire socit de services franaise avec 9600 collaborateurs et un chiffre daffaire en 2007
de 715 M. La socit est divise en trois corps de mtiers, hrits de Transiciel.
La division "High Tech" propose un service de conseil en Haute Technologie, la division "Application Services",
lIntgration de systmes depuis la conception la maintenance du systme dinformation et la division "Infrastructure
Services", linfogrance et ladministration de systmes.
Lagence PE4, base Blagnac est elle-mme dcoupe en 5 ples se rpartissant les diffrentes missions.
Cest au sein de cette agence et plus particulirement du ple optimisation que jai volu durant ces cinq mois de
stage.
Figure 2 : Activits de la socit ( gauche) et rpartition de ples ( droite)
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun
TABLE DE MATIERES
Introduction gnrale.............................................................................................................................. 1
I. Considrations gnrales.......................................................................................... 2
1. Gnration en dernier secours........................................................................ 2
2. Choix de la source........................................................................................... 2
2.1) Source dnergie et source de puissance................................................. 2
2.2) Dfinition des exigences........................................................................... 2
2.3) Sources candidates................................................................................... 3
3. Hybridation de la source.................................................................................. 3
4. Rseau avionique............................................................................................ 4
II. Ram Air Turbine (RAT) ............................................................................................... 5
1. LMS AMESim.................................................................................................. 5
2. Prsentation du systme................................................................................ 5
3. Caractrisation des lments......................................................................... 6
3.1. Turbine olienne...................................................................................... 6
3.2. Bote de vitesse et gnrateur lectrique................................................ 8
3.3. Transformateur redresseur...................................................................... 9
3.4. Supercondensateur et hacheur................................................................10
3.5. Actionneur lectro-hydraulique (EHA) .....................................................11
3.6. Charges lectriques................................................................................ 13
4. Rgulation...................................................................................................... 14
4.1. Actionneur lectro-hydraulique (EHA) .................................................... 14
4.2. Rgulation du systme............................................................................ 16
4.3. Rgulation de tension de bus.................................................................. 16
4.4. Gestion MPPT.......................................................................................... 17
4.5. Dynamique.............................................................................................. 20
5. Mission de secours........................................................................................ 20
6. Conclusion..................................................................................................... 21
III. Pile Combustible (PAC) .......................................................................................... 22
1. Prsentation du systme............................................................................... 22
2. Caractrisation de la PAC............................................................................. 22
2.1. Description.............................................................................................. 22
2.2. Dimensionnement................................................................................... 24
2.3. Modlisation de la PAC et du hacheur.................................................... 26
2.4. Rgulation de courant............................................................................. 27
2.5. Gestion du systme.................................................... 27
3. Mission de secours......................................................................................... 28
4. Etude doptimisation....................................................................................... 28
4.1. Le problme doptimisation..................................................................... 29
4.2. Rsultats doptimisation.......................................................................... 32
4.3. Choix du meilleur rsultat........................................................................ 34
4.4. Conclusion de loptimisation.................................................................... 35
5. Conclusion...................................................................................................... 35
IV. Conclusion gnrale et perspectives....................................................................... 36
1. Objectif 1........................................................................................................ 36
2. Objectif 2........................................................................................................ 36
3. Perspectives.................................................................................................. 37
Rfrences bibliographiques................................................................................................................. 38
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 1/38
INTRODUCTION GENERALE
Actuellement, les nergies mcanique, hydraulique et pneumatique sont massivement utilises dans les avions pour des
fonctions diverses, comme les commandes de vol ou le freinage. Dailleurs elles sont employes car, parmi les types
dnergie qui existent et les technologies connues, elles contribuent une masse faible et une fiabilit globale leve, les
deux variables les plus importantes dans la conception dune partie dun avion. Pourtant, le dveloppement rcent de
nouvelles manires de grer lnergie lectrique, notamment grce llectronique de puissance, permet damliorer les
caractristiques des systmes aronautiques.
En effet, il apparat que les systmes lectriques peuvent contribuer rduire la masse totale de lavion, simplifier la
rgulation, donnent la possibilit disoler une partie du rseau tombe en panne et augmentent la fiabilit. Ainsi, les systmes
lectriques se rpandent de plus en plus.
Par exemple, dans la gamme Airbus, lA380 a subi des changements importants. La distribution se compose de deux
rseaux hydrauliques et deux rseaux lectriques principaux (2H+2E), par opposition larchitecture avec trois rseaux
hydrauliques principaux (3H) des avions conventionnels. En plus, certaines commandes de vol sont devenues lectriques
comme lEHA (actionneurs lectro-hydrauliques) et lEMA (actionneurs lectromcaniques) et des disjoncteurs lectroniques
ont t introduits. De mme, le rseau alternatif est maintenant frquence variable entre 360 et 800 Hz, ce qui permet de
supprimer le systme de rgulation de vitesse mcanique, augmenter la fiabilit et rduire la masse.
En ce qui concerne le secours, des innovations ont aussi t ralises. Avant, la gnration en cas durgence tait
dabord hydraulique partir de la RAT accouple une pompe hydraulique avec ensuite une conversion en lectrique. La
source de secours est dsormais lectrique, au moyen dun gnrateur. La puissance transmise la RAT est directement
transforme en lectricit, qui devient la seule puissance disponible et, par consquent, toutes les charges essentielles
doivent tre fournies lectriquement. Ce rseau de secours reprsente une volution importante et peut encore tre
amlior.
Lobjectif de ce travail sinscrit dans ce cadre : essayer damliorer le rseau de secours lectrique de lA380 pour
pouvoir tre utilis pour des avions futurs. Les diffrents types de gnration lectrique, les architectures diverses et le
rglage du systme vont tre le moyen daction pour amliorer les performances, c'est--dire pour rduire la masse totale.
Uniquement une analyse thorique sera ralise, en utilisant la simulation pour gnrer des rsultats.
De mme, ce texte atteindra aussi un deuxime objectif, savoir la monte en comptences de Sogeti High Tech en
simulation des systmes ; activit aujourdhui en dveloppement.
Dans le Chapitre I, la situation durgence sera dcrite, les sources dnergie envisageables pour la gnration lectrique
embarque seront analyses et deux dentre elles seront approfondies. Les avantages dune hybridation de ces sources et
dun rseau de secours lectrique seront ensuite prsents. Une grande partie de ce chapitre a t crite grce
linformation provenant de Rfrence 1 [Ref1], bien que les donnes soient, en gnral, adapter.
Dans le Chapitre II, le systme avec une gnration lectrique consistant en une turbine olienne (Ram Air Turbine)
hybride par une batterie de supercondensateurs sera expliqu, dimensionn, modlis et rgul. Finalement, la mission
durgence sera simule et le systme valu. Lide de lutilisation de ce systme, ainsi que quelques informations
ncessaires modlisation, le dimensionnement et la gestion de lnergie, provient de la Rfrence 1 [Ref1], bien que les
donnes soient adapter.
Dans le Chapitre III, le systme avec une gnration lectrique consistant en une pile combustible hybride par une
batterie de supercondensateurs sera expliqu, dimensionn, modlis et rgul, et la mission durgence sera simule.
Ensuite, le dimensionnement sera optimis avec lobtention de meilleurs rsultats pour la mission durgence et le systme
sera valu. Lide de lutilisation de ce systme, ainsi que quelques informations ncessaires la modlisation, le
dimensionnement, la gestion de lnergie et loptimisation, provient de la Rfrence 2, bien que les donnes soient, ici aussi,
adapter.
Finalement, dans le Chapitre IV, une conclusion gnrale sera extraite. En effet, les analyses ralises nous permettront
de choisir parmi le systme de gnrateur actuel et les deux possibilits tudies dans ce texte, savoir le systme RAT+SC
et le PAC+SC.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 2/38
I. CONSIDERATIONS GENERALES
1. GENERATION EN DERNIER SECOURS
Quand dans un avion en vol, pour quelque raison, tous les racteurs tombent en panne, toute la gnration hydraulique
et lectrique, en plus de la propulsion, sarrtent. Pourtant, il peut toujours planer pendant un certain temps (environ une
demi-heure pour un vol croisire) et une certaine distance, qui sont proportionnels sa hauteur. Dans cette situation, le pilote
doit donc chercher laroport le plus proche ou un lieu appropri et raliser un atterrissage durgence.
Pendant le temps qui scoule entre la panne et latterrissage, il faut aussi disposer dnergie pour tous les besoins
indispensables, appels charges essentielles : les commandes des vols pour diriger lavion, les calculateurs, le train
datterrissage, le freinage, lclairage
Entre les diffrentes possibilits existant pour stocker ou gnrer cette nergie, on pourrait penser aux batteries qui sont
dj situes dans lavion, mais elles ne suffisent que pour moins de dix minutes et elles sont utilises pour des priodes
transitoires de vol et pour terminer un atterrissage. Les rendre capables de satisfaire toute la demande dnergie impliquerait
une masse trop leve.
Par ailleurs, on trouve aussi lAPU (Auxiliary Power Unit) dont la fonction principale est de dmarrer les racteurs ; mais
elle assure aussi des fonctions auxiliaires. Elle peut fournir la puissance ncessaire pour toutes les charges essentielles
mais, son dmarrage ntant pas assur en altitude pendant la situation durgence, elle ne peut tre considre comme une
source de garantie.
Ainsi, la solution qui est finalement adopte depuis de nombreuses annes est dajouter une petite turbine olienne ou
RAT (Ram Air Turbine). Celle-ci ne sera utilise quen cas durgence et profite de la grande vitesse de lavion pour extraire
une haute puissance de lair en circulation tout en ayant une masse raisonnable.
Pourtant, cette solution nest pas la seule et toute source pouvant remplir ces exigences est envisageable. Il faudra alors
considrer toutes les options et choisir la meilleure au regard de divers facteurs : masse, taille, performances, cot et fiabilit.
Pour cela, les requtes vont dabord tre dfinies en termes de puissance et nergie et les diffrentes options seront cites
et analyses.
2. CHOIX DE LA SOURCE
2.1. Source dnergie et source de puissance
Avant de commencer lanalyse des sources, il est important de comprendre les diffrents types de sources : une source
dnergie doit tre capable de fournir la totalit de lnergie ncessaire pour toute la mission, cest--dire, au minimum la
puissance moyenne absorbe par les charges ; une source de puissance doit tre capable de fournir des pointes de
puissance pour que, en combinaison avec la source dnergie, la puissance instantane puisse tre dlivre durant toute la
mission.
Dans le cas habituel o une seule source est prsente, elle devra tre la fois source dnergie et source de puissance
et, par consquent, elle devra tre dimensionne pour la puissance la plus leve constate dans une mission, en
garantissant une certaine puissance moyenne. Cest le cas par exemple de la RAT, qui est actuellement installe dans les
avions.
2.2. Dfinition des exigences
Lavion qui va tre analys ne correspond en termes de puissance aucun des avions de la marque Airbus ou Boeing
existant actuellement mais les valeurs sont proches et les rsultats obtenus sont gnralement applicables. La mission
rpond la situation la plus critique qui peut arriver, qui correspond une panne pendant un vol croisire avec des
turbulences trs fortes.
Pour dfinir les exigences, le profil de puissance requise par les charges essentielles pendant tout le temps de la
mission doit tre assur. Dailleurs, ce sont les charges essentielles qui vont imposer la puissance ncessaire chaque
instant et cest au concepteur de dcider quelle(s) source(s) seront installes et de les dimensionner.
Concernant la mission durgence et les charges essentielles, un classement en deux groups peut tre ralis : les
charges constantes, telles que les calculateurs ou lclairage, requirent une puissance qui est pratiquement constante
pendant toute la mission ; les charges fluctuantes, telles que les commandes de vol, le train datterrissage ou le freinage,
demandent une puissance trs variable dans le temps, avec des pics importants.
Puissances Charges constantes Charges fluctuantes Total
Minimale -8.8 kW 8.7 kW
Moyenne 4.4 kW 21.9 kW
Maximale
17.5 kW
35.2 kW 52.7 kW
Tableau 1 : Distribution de puissances des charges essentielles
De cette faon, en regroupant toutes les charges existantes, un profil de puissance est gnr. Dans notre cas, ce
dernier correspond une puissance moyenne de 21.9 kW avec une puissance maximale de 52.7 kW et une puissance
minimale de 8.7 kW (voir Tableau 1). Par consquent, pour une dure de la mission denviron 30 min, lnergie totale
demande devient approximativement 11 kWh.
La ou les source(s) embarque(s) doivent aussi tre capables de fournir la puissance ncessaire pendant les priodes
transitoires au dmarrage juste aprs la panne des racteurs, latterrissage et lvacuation des passagers.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 3/38
En rsum, elle assurera les demandes chaque instant, depuis le moment o les racteurs cessent de fonctionner,
jusqu ce que tous les passagers soient descendus de lavion, ce qui dfinit la mission de secours (voir Figure 3).
Figure 3 [Ref1] : Mission de secours Airbus
2.3. Sources candidates
Une fois les exigences dfinies, il faut analyser les caractristiques des sources capables de les assurer. Les candidats
sont soit des moyens de stockage, soit des gnrateurs de puissance, de diffrentes natures selon le cas :
APU (Axiliary Power Unit) : une autre APU pourrait tre installe. Celle-ci aurait une puissance et une taille beaucoup
moins leves que lAPU principale qui existe dj dans les avions et, par consquent, serait facile dmarrer dans le
cas durgence. Cependant, le fait dutiliser un combustible de caractristiques similaires au krosne nest pas la
meilleure solution par rapport la fiabilit et va tre aussi une source de pollution. Elle ne semble pas comptitive en
termes de masse non plus.
Batteries lectriques : Les batteries existantes dans les avions ajoutent une masse trs importante mme si elles
servent uniquement couvrir des priodes transitoires. Leur avantage est quelles rpondent instantanment si besoin
mais elles sont loin de pouvoir assurer toute la mission, mme pour les technologies avec une nergie massique plus
leve qui seront utilises lavenir.
Panneaux photovoltaques : A cause de leur poids, de la complexit dinstallation dans lavion et de la dpendance du
temps atmosphrique, les panneaux solaires ne seront pas considrs.
RAT (Ram Air Turbine) : Comme il sagit de la solution adapte actuellement et depuis longtemps, la RAT bnficie
dune grande performance. Les avantages principaux sont la disponibilit dune nergie propre (olienne) pendant la
plupart de la mission et les bonnes caractristiques en termes de masse et volume. Pourtant, un moyen de stockage
est ncessaire pendant le transitoire initial et lapproche au sol et atterrissage car les performances de la turbine
chutent basse vitesse (voir Figure 3). Notre objectif sera donc de remplacer ou amliorer ses caractristiques si cest
possible.
PAC (Pile Combustible) : Une pile combustible pourrait rduire la masse totale du systme de secours. Mais il
faudra aussi bien prendre en compte sa taille, particulirement si lhydrogne est utilis, et le temps ncessaire pour
chauffer la PAC jusqu ce quelle devienne disponible.
En rsum, la RAT et la PAC seront ici tudies. La possibilit damliorer le systme actuel de la RAT ou de le
remplacer par un autre avec une PAC comme source sera envisage.
3. HYBRIDATION DE LA SOURCE
Comme il a t montr, la puissance requise par les charges essentielles est trs variable durant toute la mission de vol.
Les deux sources qui ont t choisies comme candidates sont elles seules capables de fournir cette puissance, mais elles
devraient tre dimensionnes pour la puissance maximale de 52.7 kW, mme si celle-ci ne va tre ncessaire que pendant
des priodes trs courtes. De cette faon, elles seraient surdimensionnes par rapport la puissance moyenne de 21.9 kW,
avec une masse plus leve et un fonctionnement qui sera souvent loin du nominal.
Ainsi, une ide envisageable est dhybrider la source. Deux sources trs diffrentes seront distingues :
La RAT/PAC restera comme source dnergie et fournira la puissance moyenne. Elle sera donc dimensionne pour
cette puissance et travaillera la plupart du temps proche du point nominal, avec une grande rduction de sa masse.
Une source de puissance sera ajoute. Comme il ny a pas besoin dun haut stockage dnergie, cette source devra
surtout tre caractrise par une grande puissance massique, de sorte quelle soit capable de dlivrer les pics de
puissance avec une faible masse.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 4/38
Figure 4 [Ref3] : Plan de Ragone
De cette manire, les avantages de chaque source seront combins une rduction importante de la masse totale. Les
caractristiques de puissance et nergie massique pour des lments de stockage diffrents sont montres dans le plan de
Ragone (voir Figure 4). On observe que les roues dinertie et les supercondensateurs sont des candidats prsentant une
puissance massique plus leve et donc prendre en compte pour la source de puissance. Entre les deux, les
supercondensateurs seront choisis car ils sont plus dvelopps technologiquement avec des bonnes performances et leur
commande sera plus facile au sein du systme lectrique.
Finalement, la configuration qui va tre utilise pour tre capable de fournir toutes les charges sera une mise en
parallle de la source dnergie (RAT ou PAC) avec une batterie de supercondensateurs. Pour que cette mise en parallle
soit possible, il est ncessaire que les deux signaux soient du mme type (rseau alternatif ou continu) et ainsi, des
convertisseurs statiques seront ncessaires pour lassurer et pour, grce aux degrs de libert quils apportent, rguler le
systme.
4. RESEAU AVIONIQUE
En ce qui concerne les avions de la gamme Airbus : avant lA380 les rseaux principaux taient de type alternatif
(115/200 V triphase et 400 Hz). La frquence constante sobtenait avec le CSD (Constant Speed Device), un systme
hydraulique complexe qui fait tourner laxe du gnrateur lectrique une vitesse constante. Pourtant, la fiabilit du CSD
tant trs faible, la gnration lectrique a t change partir de lA380 avec limplantation dun rseau toujours alternatif
mais frquence variable (115/200 V triphase et 360-800 Hz). Ainsi, un simple multiplicateur de vitesse remplace le CSD et
des gnrateurs VFG (Variable Frequency Generator), fonctionnant vitesse variable, sont utiliss. Pour des gnrations
futures, un rseau en courant continu pourrait tre envisag. En effet, les avantages existants sont nombreux :
Le rseau a une haute qualit par rapport aux ondulations de tension, qui sont plus faciles filtrer grce la frquence
de valeur zro dans le cas continu.
La simplicit du rseau continu, avec la valeur de la tension comme seule variable rgler, permet une rgulation
moins complique et une stabilit plus leve. Par exemple, le concept de puissance ractive nexistant pas en courant
continu, il est possible de rgler la vraie puissance.
Dans le cas de la RAT, peu importe quel nombre de phases ou quelle frquence va tre utilis pour le gnrateur
puisque le signal sera ensuite redress. Les deux valeurs pourraient tre varies pour amliorer la masse ou les
performances du systme.
Dans le cas de la PAC, la gnration est directement lectrique et continue. Par consquent, il ne faut plus un
alternateur : un hacheur sera suffisant.
Lnergie de freinage de plusieurs charges pourra tre rcupre en amliorant ainsi lgrement le rendement total
et en vitant la ncessit prcdente de la dissiper en forme de chaleur. Effectivement, des nombreuses charges, qui
requirent une frquence variable (comme les machines synchrones autopilotes), ont actuellement un redresseur non-
rversible lentre. Mais avec un rseau continu, elles nen auront plus besoin et deviendront plus simples et
rversibles.
Dans le cas du rseau de secours, llment qui a t choisi comme le meilleur pour lhybridation est la batterie de
supercondensateurs. Cest pourquoi lnergie sera dabord disponible en forme de tension continue et, sa connexion
sera plus facile avec un rseau continu car un simple hacheur sera suffisant.
Compte tenu de tous ces avantages, un changement vers ces solution serait envisageable. Pourtant, il ne peut pas tre
ralis rapidement cause de la grande complexit du rseau avionique et il sera ventuellement adopt progressivement.
Dans ce cadre, le rseau continu sera prfr dans ce travail pour le rseau de secours de lavion. De mme, la source
dnergie, la source de puissance et les charges essentielles y seront adaptes. La valeur qui sera utilise pour la tension
continue est choisie 270 V puisquelle correspond la tension davant (115/200 V) redresse et ainsi permettra une
meilleure adaptation des charges (seulement lenlvement du redresseur lentre est ncessaire).
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 5/38
II. RAM AIR TURBINE (RAT)
Dans ce chapitre, la turbine olienne ou RAT et une batterie de supercondensateurs seront utilises comme source
durgence pour dlivrer la puissance requise par les charges essentielles dans chaque instant. Comme il a t signal, cette
hybridation, installe au sein dun rseau continu, a plusieurs avantages par rapport au systme existant actuellement avec
une RAT seule et un rseau alternatif : qualit et stabilit du rseau, simplicit de contrle, rduction de la masse du
systme, relaxation de contraintes de variables (comme la frquence), rversibilit des charges et meilleur fonctionnement
des sources.
Afin de valider que tous ces avantages sont en effet des amliorations, des modlisations, des dimensionnements, des
commandes et des simulations seront raliss laide du logiciel de simulation systme LMS AMESim. Pourtant, le but de
ltude tant effectuer une conception systme, il ny aura pas danalyses trs approfondis et la rgulation globale du
systme sera le fil directeur.
Avant de commencer, le logiciel de simulation sera prsent. Ensuite, la prsentation du systme, la modlisation de
chaque lment et la rgulation adapte aux lments et au systme seront ralises. Finalement, la mission durgence sera
simule et des conclusions seront extraites.
1. LMS AMESIM
LMS Imagine.Lab AMESim est un logiciel spcialis en simulation 1D. Il est trs bien adapt la simulation systme et
multiphysique de par les raisons suivantes :
Disponibilit de plusieurs librairies de divers domaines de la physique : lectrique, hydraulique, thermique,
pneumatique, mcanique ainsi que des lments avec entres et sorties de domaines diffrents (par exemple,
dans un moteur lectrique, les parties lectrique, mcanique et thermique peuvent tre traites).
Causalit de chaque lment. Effectivement, chaque lment des librairies dispose dentres et de sorties avec une
causalit effort-flux pour chaque une et les connexions doivent tre ralises en les respectant. Cela facilite la
comprhension et la conception du systme, empche de faire des erreurs et rend laccs la simulation rapide.
Possibilit de crer des nouveaux lments ou de changer leur code et de crer des supercomposants agroupant
plusieurs lments.
Des exemples de composants et supercomposants avec la causalit associe sont montrs dans la Figure 5.
Figure 5 : Logiciel LMS AMESim
2. PRESENTATION DU SYSTEME
Le systme se compose de trois parties bien diffrencies (voir Figure 6), avec tous les lments ncessaires pour leur
adaptation au rseau lectrique continu, qui possde une valeur de tension fixe (imposition de tension) :
Source dnergie : La turbine olienne extrait une partie de la puissance transporte par lair et la transforme en
puissance mcanique. Cette puissance dpend de la vitesse et laltitude de lavion, ainsi que dune variable qui
pourra tre contrle, la vitesse de la turbine. Ensuite, la vitesse de rotation est augmente afin de diminuer le
couple du gnrateur et rduire ainsi sa taille. Une machine synchrone au lieu dune machine courant continu sera
utilise comme gnrateur lectrique grce ses meilleures proprits, do la ncessit de redresser le signal
avec linsertion dun convertisseur statique. Cet ensemble, qui sera appel dsormais RAT, a un degr de libert, le
courant dexcitation du gnrateur lectrique.
Figure 6 [Ref9] : Rseau de secours avec la turbine olienne
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 6/38
Source de puissance : Le supercondensateur ayant une tension variable et infrieure celle du rseau, il est
ncessaire dajouter un hacheur pour les lier. En plus, de cette faon, le courant dlivr par le supercondensateur
peut tre rgul au moyen de ce convertisseur grce son degr de libert (rapport cyclique).
Les charges essentielles : Diverses charges constantes (comme les calculateurs) et diverses charges variables
(commandes de vol, freinage, train datterrissage) demandent une puissance lectrique qui devient finalement
fortement variable.
Un condensateur a t aussi introduit afin de crer une source de tension vis--vis des charges et de filtrer les
harmoniques de courant des deux sources de sorte que les harmoniques de tension soient rduits.
Plusieurs diffrences existent entre ce systme et lancien systme avec un rseau alternatif. En ce qui concerne
lentre des charges lectriques, pour les charges qui ncessitent un courant continu ou frquence contrle, les
redresseurs doivent tre supprims ; pourtant, pour les charges qui demandent un courant frquence non contrle, des
onduleurs doivent tre ajouts. Etant donn quil y a de plus en plus dactionneurs commands avec un moteur autopilot, le
bilan final en termes de masse est positif.
Mme sans considrer ce dernier point concernant les charges, une rduction de masse est attendue. En effet,
concernant la source dnergie et malgr le fait davoir ajout un nouvel lment (le redresseur), tous les autres sont
dimensionns pour la puissance moyenne, qui reprsente moins de la moiti de celle davant. De plus, le poids du
supercondensateur avec le hacheur natteint pas une valeur leve grce sa haute puissance massique et ainsi, la masse
totale sera rduite.
3. CARACTERISATION DES ELEMENTS
Une partie importante de ce chapitre correspond la modlisation des lments afin de pouvoir obtenir des rsultats de
simulation fiables. Dans cette section, une description, un dimensionnement, une modlisation et une commande (sil
convient) de chacun des diffrents lments seront raliss.
Avant dassembler le systme, chaque lment sera valid sparment. Les diffrents lments vont tre analyss dans
lordre suivant : turbine olienne, bote de vitesse et gnrateur lectrique, transformateur-redresseur, supercondensateur et
hacheur, charges essentielles (y compris lEHA).
3.1. Turbine olienne
3.1.a) Description
Lobjectif de la turbine est dextraire la plus grande puissance possible de lair pour une certaine taille et vitesse de
lavion. Elle est donc compose de deux ples, en assurant une haute puissance avec un poids plus bas. Cette puissance
en forme de vitesse de lair est transforme en puissance mcanique, qui sera transmise au gnrateur lectrique.
Un systme dorientation de ples est aussi habituellement utilis en aronautique. Dans notre cas, il sagit dun
montage de ressorts et contrepoids, qui ragit automatiquement en fonction de la vitesse de rotation de la turbine. Pour des
faibles vitesses, il y a un fonctionnement en bute, les ples sont orientes normalement et extraient une grande puissance
(angle de calage vaut zro). Pourtant, quand la vitesse de la turbine dpasse une certaine valeur, langle de calage
augmente rapidement, en rduisant ainsi la puissance extraite, jusqu la valeur maximale de langle .
Le but de ce systme mcanique est de limiter la vitesse de rotation. En effet, face la rduction brusque de la
puissance absorbe quand la vitesse augmente mais aucun changement pour la demande de puissance du gnrateur
lectrique, lnergie cintique de la turbine se verra rduite. Linstallation de ce mcanisme est justifie par sa simplicit,
efficacit et fiabilit.
3.1.b) Modlisation
Etant donn que plusieurs formules utilises pour modliser la turbine sont exprimentales voire de simples relations
mathmatiques, la librairie Signal de AMESim sera employe.
La puissance transporte par une masse dair dpend de sa densit, de la surface de la turbine et la vitesse de lavion
de la faon suivante :
3
2
1
avion T AIR
v S P =
[Ref1]
A part la surface, qui est une constante, les autres valeurs ne sont pas des donnes dentre mais peuvent tre
calcules partir delles. En effet, la densit de lair est fonction de la hauteur de lavion z. Pour son calcul, on la considr
comme gaz idal. De mme, la vitesse de lavion est fonction de la hauteur et de la vitesse VCAS, donne dentre en nuds
qui reprsente la vitesse de lavion par rapport une masse dair prdfinie. Elle sera obtenue en multipliant VCAS par un
coefficient variable f(z) [Ref1].
Pourtant, toute la puissance transporte par lair narrive pas la turbine cause dune perte de vitesse de lair en phase
dapproche. Un coefficient de pertes considr comme constant sera utilis et ainsi, la vitesse effective deviendra la vitesse
de lair au moment darrive, appele VT :
3 '
2
1
, 1
T T AIR avion T
v S P v aeroloss v = =
[Ref1]
De mme, il y aura des pertes arodynamiques qui seront reprsentes par le coefficient de puissance CP et, par
consquent, la puissance finalement absorbe et transmise par la turbine devient :
'
max
3
,
2
1
AIR
T
T
T
P P T T T
P
P
P
P
C avec C v S P = = =
[Ref1]
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 7/38
Lexpression du coefficient de puissance CP est trs complexe. Ce dernier varie fortement avec la forme de la turbine et
le nombre de ples ; cest pourquoi il est donn exprimentalement. En tout cas, il ne peut pas dpasser la limite thorique
de Betz gale 9/16.
Afin de tracer la courbe du coefficient CP, deux variables doivent tre prises en compte, savoir le coefficient
adimensionnel (rapport entre la vitesse de la turbine et de lair) et langle de calage des ples (voir description de la
turbine). Laugmentation de ce angle provoque toujours une rduction du CP et ainsi, le maximum se trouve CP=x pour =x
et =0. Le bilan de puissance avec les pertes, la caractrisation de CP, et est montr dans la Figure 7 :
Figure 7 : Bilan de puissances, coefficient de puissance et angle de calage [Ref1]
De plus, la rponse dynamique de langle par rapport la vitesse de la turbine sera prise en compte, en considrant un
systme de premier ordre avec une constante de temps =x ms.
Finalement, le modle AMESim en utilisant des supercomposants a t implment (voir Figure 8).
Figure 8 : Modle AMESim de turbine olienne
3.1.c) Dimensionnement de la turbine et frquence de gnration
La turbine utilise a des caractristiques de forme, nombre de ples, matriaux dj dfinies et qui ne seront pas
changes dans ce travail. Les paramtres qui interviennent donc dans le dimensionnement de la turbine sont le rayon RT et
les paramtres du systme mcanique dorientation de ples (bute de vitesse Tbute et pente du courbe angle -vitesse,
voir Figure 8).
Grce aux donnes dEADS Casa pour lavion militaire A400M, les rendements de la bote de vitesse et du gnrateur
lectrique sont connus. De cette faon, partir de la puissance moyenne qui doit tre dlivre aux charges (21.9 kW), la
puissance que la turbine doit fournir peut tre calcule. Pour ce calcul, les rendements seront lgrement rduits et une
marge de scurit, qui sera explique plus bas, sera prise en compte :
SEC BV MS
es moych
T
P
P
=
arg
Le Tableau 2 va nous aider comprendre les relations entre les diffrentes vitesses et frquences et dimensionner la
turbine (voir aussi Figure 3).
Minimum Nominal Maximum Unit
VCAS 130
66.87
140
72.02
300
154.32
nuds
m/s
Vavion 67.30 73.46 243.32 m/s
VT 49.91 54.48 180.45 m/s
T x
x
x
x
x
x
rad/s
tours/min
MS MSMIN MSNOM MSMAX tours/min
Frquence FMIN FNOM FMAX Hz
Tableau 2 : Divers vitesses et frquence de gnration
z=300 z=500 z=9000
f(z)
aeroloss
OPT OPT
NP
d
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 8/38
Le point nominal de dimensionnement est choisi une vitesse VCAS de 140 nuds et une hauteur de 500 m. Cest le
moment o la RAT est sur le point dtre retire, avec une puissance disponible dans lair trs faible mais, en mme temps, il
faut quelle fournisse la puissance de dimensionnement. Dans cette perspective, la vitesse de la turbine T qui correspond
au fonctionnement optimal de la turbine pour ces conditions de dimensionnement sera choisie comme vitesse partir de
laquelle langle de calage des pales commencera monter. Par consquent, la turbine pourra tre mene travailler pour
fournir la puissance optimale (OPT, CPOPT) si la vitesse VCAS est plus petite que 140 nuds grce la rgulation ralise.
Cependant, une vitesse plus haute, langle de calage se verra rduit et une chute de rendement (CP<CPOPT) aura lieu
dune manire contrle.
De mme, le minimum pour le dimensionnement sera une vitesse VCAS de 130 nuds et une hauteur proche 0 parce
que la puissance qui pourrait tre extraite est dj trs faible et cela peut provoquer linstabilit du systme. Finalement, le
maximum correspond la vitesse maximale atteinte durant la mission (VCAS = 300 nuds, hauteur denviron 9000 m).
Quant la frquence de gnration, elle pourrait tre fortement variable parce que le courant va tre redress. Pourtant,
pour ne pas sloigner beaucoup du cas actuel du rseau avionique, des limites vont tre dfinies entre FMIN et FMAX. Des
tudes pourront plus tard tre ralises pour optimiser la frquence de fonctionnement.
Donc, certaines valeurs ont t imposes pour la vitesse de lair et de lavion (en noire dans le Tableau 2) et dautres
pour la frquence maximale et minimale (en rouge dans le Tableau 2). A partir de ces valeurs, autres paramtres seront
imposs. Cest le cas du rapport de transmission et des vitesses qui en sont dduites (en bleu dans le Tableau 2).
Finalement, pour garantir une frquence maximale de FMAX, on agira sur le systme mcanique, cest--dire, sur la pente de
la variation de langle en fonction de la vitesse de rotation (en rose dans le Tableau 2). La courbe et les valeurs slectionnes
sont montres dans la Figure 9.
Figure 9 : Angle de calage en fonction de la vitesse de rotation de la turbine
Enfin, il faut dfinir le rayon de la turbine pour que, compte tenu des conditions au point nominal et avec un
fonctionnement optimal (CP=CPOPT), la puissance de dimensionnement puisse tre extraite :
T T Popt T T T
R S C v S P =
3
2
1
Une rduction de rayon denviron 35% par rapport au dimensionnement pour la RAT comme seule source de puissance.
3.2. Bote de vitesse et gnration lectrique
3.2.a) Description
Comme il a t montr, le multiplicateur de vitesse situ la sortie de la turbine va augmenter la vitesse de rotation par
un rapport de d, afin de ladapter au gnrateur lectrique.
En ce qui concerne la gnration lectrique, il y a besoin du degr de libert apport par une machine synchrone rotor
bobin (MSRB), le courant dexcitation mais, en mme temps, il y a intrt viter les contacts glissants, comme dans une
machine synchrone aimants permanents (MSAP). Dans lactualit aronautique, pour obtenir les avantages des deux
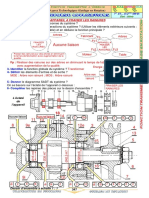
systmes, la configuration montre dans la Figure 10 est utilise :
Figure 10 [Ref1]: Schma de la RAT : turbine, bote de vitesse et gnrateur
Cette structure sera aussi utilise pour notre tude, mme si elle ne sera pas modlise de manire exacte. Elle se
compose de trois machines asynchrones qui tournent dans le mme axe :
Machine synchrone aimants permanents (MSAP) : Elle fourni la puissance ncessaire au calculateur et la MS
auxiliaire.
Machine synchrone auxiliaire (MS auxiliaire) : Il sagit dune MSRB linverse ; cest--dire, avec un rotor fixe qui
reoit une excitation provenant du calculateur et avec un stator tournant la mme vitesse que le rotor de la MS
principale. Le courant la sortie est contrl par le calculateur et redress par un pont diodes, afin dtre adapt
pour fournir la MS principale.
Machine synchrone principale (MS principale) : Cest une MSRB normale, avec une excitation assure par la MS
auxiliaire et le circuit de puissance situ au rotor.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 9/38
3.2.b) Modlisation
Le circuit compos par les trois machines synchrones est quivalent, vis--vis de la simulation lectrique, une MSRB
avec une excitation contrle. Par consquent, uniquement la MS principale sera vraiment modlise, comme une machine
synchrone excitation spare. Lalimentation du circuit dexcitation consiste en une source de tension contrle.
Les deux autres machines servent gnrer cette excitation, qui se traduit en une absorption de la puissance dans
laxe, modlise comme une perte de couple avec le supercomposant losses :
MS
exc exc
I V
C
=
Et, d la petite puissance des machines, les pertes seront ngliges par rapport celles de la MS principale.
Quant la partie mcanique, le frottement et linertie totaux, qui comprend ceux de la turbine, du multiplicateur et du
gnrateur, sont modliss. Ils sont agroups dans un composant dAMESim avec les deux paramtres f et J.
Figure 11 : Modle AMESim du multiplicateur et des machines de gnration lectrique
3.3. Transformateur redresseur
3.3.a) Description
Un redresseur est ncessaire afin de pouvoir connecter la gnration lectrique alternative au rseau continu. En plus,
un transformateur est souvent insr puisquil ajoute un degr de libert qui peut tre utilis pour diverses amliorations
comme la rduction de pertes ou la qualit du courant.
Un simple transformateur triphas toile-toile de rapport de transformation m suivi par un pont redresseur diodes est
dabord utilis. Afin de rduire les oscillations de courant (14.03%), un transformateur spcial avec 3 entres et 6 sorties a
t ensuite employ (voir Figure 12), suivi par deux ponts redresseurs diodes. Avec cette configuration, les oscillations de
courant ont t diminues par un rapport de 4 (3.45%) et la frquence sest vue double. Par consquent, les oscillations de
tension dans le condensateur du bus qui sont dues ce courant seront divises par 8. Malgr quil y ait plus de bobines et de
redresseurs, ils seront dimensionns pour une puissance et un courant/tension plus bas (par exemple, IA et IB vaudront la
moiti quIRAT) et la masse et cot totaux naugmenteront pas beaucoup. De plus, la rgulation du courant, qui considre le
courant IRAT comme purement continu, sera meilleure dans ce cas. Cette configuration sera donc utilise finalement.
Figure 12 : Transformateur redresseur
3.3.b) Modlisation
Le redresseur de courant sera modlis avec un composant disponible en AMESim, le pont 6 diodes. Il prend en
compte des pertes dans chaque diode, en le considrant comme un lment rsistif en conduction. Pourtant, des basses
valeurs ont t choisies et les phnomnes dynamiques ont t ngligs comme premire approximation.
En ce qui concerne le transformateur spcial, ne disposant que dun transformateur monophas en AMESim, deux
supercomposants seront crs (voir Figure 13). Le SC1 est compos tout simplement par trois transformateurs monophass
idaux. Par contre, le SC2 a t cr avec la librairie Signal en respectant les rgles de Kirchhoff pour un transformateur
triangle-toile et la mthodologie de calcul du logiciel lie la causalit.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 10/38
Figure 13 : Modle AMESim du transformateur redresseur
Les inductances de fuites des transformateurs seront ngliges mais le reste des inductances et les rsistances seront
considrs en augmentant les paramtres utiliss pour la machine synchrone.
3.4. Source de puissance : supercondensateur et hacheur
3.4.a) Description
Le supercondensateur a t choisi comme le meilleur moyen de stockage pour servir de source de puissance dans
lhybridation. Un hacheur sera insr entre le supercondensateur et le rseau, ce qui permet dutiliser son degr de libert
pour contrler le courant dlivr. En plus, de cette faon, la tension du supercondensateur VSC ne sera pas dpendante de
celle du rseau et avec un hacheur lvateur ou Boost, cette valeur pourra tre plus basse. La topologie doit tre rversible
en puissance puisque la puissance fournie par le stockage sera de moyenne zro (voir Figure 14) :
Figure 14 : Hacheur lvateur de tension
3.4.b) Modlisation
Un modle simple sera utilis pour le supercondensateur, consistant en un condensateur en srie avec une rsistance
qui reprsente les pertes. Les pertes de linductance et du convertisseur seront agroups dans une autre rsistance RCVS.
Quant aux interrupteurs de puissance rversibles et, dans le cas instantan, lassociation dun transistor et une diode
idaux, disponible en AMESim, sera utilis. Par contre, le modle moyen sera aussi analys pour ainsi tre capable de
choisir le modle le mieux adapt pour la simulation du systme. Cette fois, le transformateur disponible en AMESim, qui sert
aussi des variables continus, sera employ afin de reprsenter les formules correspondantes (voir Figure 15).
Figure 15 : Modles AMESim du supercondensateur et du hacheur
3.4.c) Dimensionnement
Supercondensateur
Pour le supercondensateur, aucune analyse ne sera ralise. Comme le profil de puissance de charge qui sera utilis
dans ce travail est similaire en valeur et forme celui de la Rfrence 1 [Ref1], le dimensionnement et choix du composant
effectus seront considrs comme valides. Les valeurs qui seront donc employes :
kg m R F C
SC SC
7 . 16 16 . 0 7 = = =
Inductance
Pour limiter les oscillations de courant dans le supercondensateur dues au dcoupage au 10% du courant maximal qui
intervient dans le dimensionnement du supercondensateur (IMAX), une valeur sera fixe pour linductance. La valeur critique
de sera utilise pour son dimensionnement :
MAX DEC
BUS
SC
SC DEC
BUS
MAX
I f
V
L
L f
V
I
=
=
4
) 1 (
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 11/38
Pertes hacheur
La rsistance de pertes dans le convertisseur modlise un rendement de 95% au point nominal de fonctionnement
[Ref1]. Cette rsistance sera additionne la rsistance de la bobine, avec RCVS comme rsultat :
Condensateur de bus
Le condensateur de bus doit limiter la variation de la tension de bus. Les trois causes de ces variations de tension sont :
les ondulations du courant du SC provoques par le dcoupage, les ondulations du courant provenant de la RAT provoques
par un redressement imparfait, et les transitoires de courant de charges. Cependant, cette dernire cause est la plus
importante et sera la seule considrer. En effet, quand il y a des changements trs rapides de la puissance demande, la
dynamique de lensemble SC-hacheur ne permettent pas de suivre le courant requis, et sera le condensateur de bus qui
fournira ou absorbera cette puissance, avec une variation de tension de bus. La valeur du condensateur pour limiter cette
variation 6V, en supposant une perturbation en chelon de courant sera estime de faon approxime :
BUS
S
V
t
I
C
2
3.5. Actionneur lectro-hydraulique (EHA)
Ltude des actionneurs lectro-hydrauliques est trs importante pour la modlisation des charges essentielles puisquils
reprsentent une grande et trs variable consommation. Les informations ncessaires pour caractriser lEHA ont t
obtenues de la Rfrence 1 [Ref1], de la Rfrence 4 [Ref4] et des exemples existants dans laide dAMESim. D sa
complexit, la modlisation a t ralise dabord en Bond Graph [Ref1, Ref4] afin davoir une vision plus claire du systme
et, ensuite en AMESim.
3.5.a) Description
LEHA fait partie des commandes de vol et se charge de contrler la position dune gouverne pour diriger lavion. Il est
exactement comme une servocommande hydraulique traditionnelle avec une conversion lectrique-hydraulique lentre.
Un schma de lEHA avec toutes ses parties est prsent dans la Figure 16, o il ny a plus besoin dun redresseur
grce au rseau continu et, par consquent, il devient rversible en courant et en puissance. Les diffrents lments montrs
dans la figure vont tre dcrits :
Londuleur triphas rversible apporte les deux degrs de liberts ncessaires pour contrler la vitesse du moteur
synchrone avec le couple maximal pour une certaine valeur du courant avec des commutations 20 kHz.
Le moteur, qui fonctionnera aussi comme gnrateur pour des courants ngatifs, est une machine synchrone
aimants permanents. A cause du petit couple dvelopp par les machines lectriques de petite taille pour une
certaine puissance, la servocommande est ensuite ncessaire pour contrler la position de la gouverne. Cette
MSAP sera command en vitesse.
La pompe hydraulique est de type volumtrique et tourne dans le mme axe que le moteur lectrique. Elle
transforme la puissance mcanique de rotation en nergie hydraulique, qui est apporte lhuile. Par suite des
grandes diffrences gnres entre les pressions aux deux cots de la pompe et extrieure, des fuites internes et
externes existeront.
Le vrin hydraulique est actionn par le fluide pomp et permet de dplacer la gouverne par moyen de la timonerie.
Ce fluide subira une compression dans les deux chambres du vrin et des fuites internes et externes existeront
aussi dans ce cas.
Le circuit hydraulique se compose de divers lments. Il y a un accumulateur, qui permet de rcuprer les fuites
externes de la pompe et du vrin et empche la cavitation dans les conduites en imposant une limite pour la
pression minimale par moyen de des valves. Un antisurpresseur ou limiteur de pression est utilis et des pertes et
une compression du fluide existeront aussi dans lEHA.
La timonerie dplace la gouverne actionne par le vrin. Des raideurs dancrage et timonerie seront considrs,
ainsi que des pertes provoques par lactionneur hydraulique redondant qui existe.
La gouverne de commande de vol tourne lentement pour suivre la rfrence de position. Le mouvement de
translation est converti en rotation grce au bras de levier BL, transformant la force du vrin en couple.
3.5.b) Modlisation
Chaque un des lments est modlis comme un composant dAMESim ou un supercomposant form par plusieurs
composants (voir Figure16). Deux parties vont tre diffrencies : lentre, partie lectrique avec londuleur et le moteur
synchrone ; et la servocommande, partie hydraulique et mcanique avec le reste dlments.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 12/38
Figure 16 : Modle AMESim dun actionneur lectro-hydraulique (EHA)
Partie lectrique
Londuleur triphas avec causalit en tension nexiste pas en AMESim et il a t cr partir de six interrupteurs idaux.
Le moteur sera reprsent par un modle dune machine synchrone aimants permanents et une inertie modlise les pertes
par friction et les inerties existantes dans laxe, le moteur et la pompe.
Figure 17 : Modle AMESim instantan et moyen de la partie lectrique
Un modle moyen est aussi utilis pour londuleur. Il utilise la loi de la conservation de la puissance instantane pour
faire une liaison entre le circuit monophas et le triphas. Ce modle a une prcision plus basse mais il a lavantage dtre
plus simple et le temps de simulation sera donc rduit. Plus bas, avec la simulation, une comparaison entre modles et un
choix de la meilleure option auront lieu. Les deux cas peuvent tre observs dans la Figure 17.
Servocommande
Un modle Bond Graph de la servocommande avec des transformateurs (transformation entre variables de nature
diffrente), des lments capacitifs (imposition deffort), des lments inductifs (imposition de flux) et des lments rsistifs,
similaire celui de la Rfrence 1 [Ref1], a t trs utile pour la modlisation du systme.
La pompe volumtrique est modlise comme une pompe idale (transformateur en Bond Graph), suivie par des valves
qui reprsentent les fuites externes et internes. Etant le volume trs faible, avec un rapport de D=x cm
3
/rad, la compressibilit
du fluide dans la pompe peut tre nglige.
Laccumulateur gaz impose une pression faible quasiment constante mais plus leve que la pression atmosphrique,
qui servira comme limite infrieure. De cette faon, deux valves, empchent que la pression descende en dessous de cette
valeur et que la cavitation ait lieu. Les valves fonctionnent comme des diodes en lectrique, avec une chute de pression de
0.1 bar en conduction et sans pertes quant ils sont ferms.
Ensuite, le modle existant en AMESim pour des lignes hydrauliques avec des pertes par friction et la compressibilit de
lhuile sera utilis. La simplicit du modle AMESim, qui calcule les paramtres partir de donnes des dimensionnes et
caractristiques des conduites, et le fait quun lment capacitif soit ncessaire pour une correcte causalit va nous mener
considrer les pertes et la compressibilit dans la ligne, mme si les valeurs ne sont pas trs leves.
Pour modliser la valve antisurpresseur, deux valves en antiparallle seront utilises. Elles laissent passer le fluide une
fois que la diffrence de pression dpasse les 200 bars, comme mesure de scurit.
Le vrin est reprsent par un lment qui prend en compte la compressibilit de lhuile dans les chambres, la masse et
la friction. Pourtant, les fuites internes et externes peuvent tre ngliges par rapport la pompe. La compressibilit est
calcule partir de des donnes de dimensions du vrin et de caractristiques du fluide, directement par AMESim, et la
masse et la friction sont introduits. Bien que la masse ne soit pas trs importante pour la modlisation du systme, elle sera
considre pour respecter les rgles de causalit. La transformation de pression en force se fait avec une surface de
2 2 2
) (
4
cm x D D S
i e
= =
Les raideurs dancrage et timonerie sont agroups et modliss comme un lment capacitif en parallle avec un
lment rsistif. En outre, les pertes provoques par lactionneur hydraulique redondant seront considres comme une
perte constante de force.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 13/38
Ensuite, un modle du bras de levier, qui ralise une simple transformation, est utilis, avec un rapport de BL=x mm. Elle
fait tourner la gouverne, qui est reprsente par une grosse inertie avec des pertes par friction et des limites de position.
Finalement, un couple constant modlise de faon trs approxime la rsistance de lair.
Figure 18 : Modle AMESim de la servocommande
3.6. Charges lectriques
Les charges constantes seront modlises trs simplement. Avec la librairie Signal dAMESim, un supercomposant
dont son courant suit les variations de tension pour obtenir une puissance constante est cr. En plus, des modles des
EHAs avec des rfrences de position diffrentes et, par consquent, des profiles de puissance diffrentes seront ajouts en
parallle pour gnrer le profil global des charges.
Figure 19 : Charges lectriques
4) REGULATION
Les charges consomment une certaine puissance et les sources sont obliges garantir la disponibilit de cette
puissance chaque moment. Cest pourquoi deux groupes peuvent tre distingus vis--vis de la rgulation :
La rgulation des charges dpend du type de charge et directement de la mission de vol mais ne dpend
gnralement pas du systme complet. Par exemple, un EHA qui suit une rfrence de position en fonction des
manuvres faire ou des plaques de cuisine qui travaillent en fonction de la nourriture commande par les
passagers. Par consquent, ces rgulations seront ralises en premier lieu.
La rgulation de chaque source dpend totalement de la puissance consomme par les charges ainsi que de la
puissance fournie par lautre source. De cette manire, chaque source doit tre suspendue au fonctionnement du
systme et va accomplir une certaine fonction par rapport ses caractristiques. Par consquent, ces rgulations
seront ralises au final, une fois que la rgulation de charges et la comprhension du systme aient eu lieu.
Dans tous les cas, chaque un des trois systmes contrler sera divis en sousystmes de sorte assurer le bon
fonctionnement dune partie avant de lajouter un ensemble. Ainsi, une source (de tension/couple/vitesse) sera ajoute
quant ncessaire pour complter le sousystme et modliser les entres et les sorties.
4.1. Actionneur lectro-hydraulique (EHA)
4.1.a) Partie lectrique
Pour la rgulation de la partie lectrique de lEHA (voir Figure 17), une source de tension constante de VBUS=270 V
lentre et une source de couple constante la sortie seront considres. Le procs pour arriver commander la vitesse de
la machine synchrone est le suivant :
Le but est que la machine lectrique suive une rfrence de vitesse. Pour cela, le couple lectromagntique
ncessaire sera calcul grce au rgulateur de vitesse, parce quil agit sur lacclration du moteur.
Pour suivre la rfrence de couple, les courants statoriques seront calculs. De plus, comme un autre degr de
libert est disponible, les courants vont aussi crer un flux qui tourne perpendiculairement au flux du rotor afin que
les valeurs des courants soient minimises pour un certain couple.
Pour tablir ces courants, des valeurs des tensions de phase seront calcules avec un rgulateur de courant.
La valeur moyenne des tensions peut tre fixe par moyen des rapports cycliques de londuleur de tension.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 14/38
La configuration finale de commande est montre dans la Figure 20 et chaque partie, en commenant par la boucle
interne, sera explique dans la suite.
Figure 20 : Rgulation de vitesse du moteur lectrique
Rgulation de tensions
Lobjectif est de fixer les tensions de phase dans le moteur V1N, V2N, V3N partir des commutations 20 kHz des
interrupteurs u1, u2, u3 (rapports cycliques 1, 2, 3) et une tension constante de E=VBUS=270 V (voir la Figure 20). La valeur
de i sera directement calcule partir de Vi pour notre systme quilibr de la manire suivante :
E
V
i
i
+ =
2
1
Par la suite de cette rgulation, il y aura une non-linarit pour la tension de phase partir de E/2=135 V et cest pour
cela que la tension sera limite a cette valeur. Avec une rgulation avec harmonique de troisime ordre, une valeur de 155 V
pourrait tre atteinte mais il ny en a pas besoin dans ce cas.
Rgulation de courants
Lobjectif est dtablir les trois courants IS1, IS2, IS3 de rfrence partir des tensions de phase. Le modle considr
pour le moteur prend en compte la rsistance, linductance et la force lectromotrice de la machine. Le synchronisme dans la
machine ne sera pas encore atteint puisque le flux statorique, qui tourne la frquence des courants, augmente trop
rapidement pour tre suivi par le flux rotorique, qui tourne la vitesse mcanique du rotor.
La rgulation a t ralise pour obtenir une bande passante de x rad/s (entre la vitesse de rotation r<x rad/s et la
frquence de commutation d=40000 rad/s), dabord avec un rgulateur PI suivi par un filtre passe bas. Il peut sobserver
dans les rsultats de simulation (voir Figure 21 gauche), quil y a une bonne rgulation de courant, avec un tablissement
rapide mais avec trop de dpassement.
.
Figure 21 : Courant de stator sans ( gauche) et avec ( droite) anti-windup
Ensuite, une rgulation avec compensation des forces lectromotrices et une autre avec un rgulateur PI double au lieu
dun PI+filtre ont t simuls. Pourtant, labsence damliorations notables nous a conduits rester avec le rgulateur
original.
Afin de rduire le fort dpassement des courants, qui nous amnerait surdimensionner les lments lectriques, la
technique anti-windup va tre utilise. En effet, un rapide tablissement du courant est dsir, mme quand la valeur de la
tension est sature 135 V. Cest pourquoi lintgration dans le PI est trop leve et il y a un grand dpassement aprs la
saturation. La solution consiste en rduire la constante dintgration pendant la saturation de faon annuler cet effet non
linaire qui navait pas t pris en compte dans le calcul du rgulateur. Le dpassement a t rduit de 50% 10% environ
(voir Figure 21 droite).
Rgulation de couple
Lobjectif est de gnrer les trois valeurs de courants telles que le couple soit celui de rfrence. Comme le couple est
proportionnel lamplitude du courant, aucune boucle de contrle ne sera ncessaire. Lautre degr de libert disponible,
langle des courants, sera utilis pour atteindre le couple maximal pour une certaine amplitude. Cela sobtient en plaant le
flux statorique perpendiculaire au flux rotorique, dont langle sera mesur par un capteur de position.
max
max max max
3
2
0 cos
2
3
= = =
P
S S P
N
C
I et I N C
Pour obtenir cet angle =0, cest--dire, les flux perpendiculaires, il faut les synchroniser. Avec la position du rotor, les
courants sont dfinis :
)
3
4
sin( ),
3
2
sin( , sin
max 3 max 2 max 1
= = =
S S S S S S
I I I I I I
De cette faon, la frquence des courants est toujours la mme que celle du rotor et le synchronisme est retrouv.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 15/38
Rgulation de vitesse
Lobjectif est de dterminer le couple ncessaire pour suivre la rfrence de vitesse. Pour cela, un rgulateur PI est
utilis. Quant au modle, un couple rsistif constant, une inertie et une friction sont considrs.
Les valeurs sont calcules pour une bande passante de x rad/s. La compensation de couple nest pas utilise car elle
napporte pas des amliorations importantes et le temps dtablissement tS devient x ms.
Cette commande marche trs rapidement pour des petites variations de vitesse, ce qui sera le plus habituel. Pourtant,
pour les transitoires avec des variations de vitesse leves, des dpassements trs grands sont trouvs cause de la
saturation de couple. Afin de lviter, de mme que dans les rgulations de courant, un anti-windup est implment avec la
suite dune diminution importante du dpassement. Les rsultats avec et sans anti-windup se montrent dans la Figure 22. Il
peut sobserver que la saturation de couple provoque une intgration excessive de lerreur et une couple de rfrence trop
lev dans le cas sans anti-windup.
Figure 22 : Rgulation de vitesse avec et sans anti-windup
Modle moyen
Les rfrences de tension sont directement appliques au moteur (voir la Figure 17 droite) et, tant les commutations
limines du modle, le temps de simulation sest vu trs rduit. Les rsultats de simulation sont peu les mmes que dans
le modle instantan et, du coup, le modle moyen sera utilis pour la suite. Les rsultats ne sont pas montrs car aucune
diffrence ne peut sobserver chelle normale.
4.1.b) Servocommande
Pour la rgulation de la position de la gouverne dans la servocommande (voir la Figure 18), une source de vitesse
rglable est utilise lentre puisquune rgulation de vitesse parfaite dans la machine lectrique est considre. En effet,
cette approximation ne posera aucun problme d aux grandes diffrences de dynamique.
Le modle global sera notablement simplifi pour la commande. Des lments ne sont pas utiliss pendant le
fonctionnement normal et dautres ont une valeur trs faible et peuvent tre ngligs sans beaucoup derreur. Les lments
les plus importants et qui seront pris en compte sont les relations de transformation (D, S, BL), la compressibilit de lhuile
dans les chambre du vrin (C), la friction de la gouverne (R) et linertie de la gouverne (L).
Le rgulateur ne sera plus un PI cause de la complexit du modle. Un rgulateur avec deux zros pour compenser
les deux ples du systme et avec deux ples sera utilis :
) )( (
)
1
(
) (
2
B p A p
LC
p
R
C
p k
p R
+ +
+ +
=
Avec les valeurs de A=x, B=x et k=x, le systme en boucle ferme devient :
0 ,
) )( )( (
= =
+ + +
= t Depassemen s x t
c p b p a p
c b a
S
Gref
G
Pourtant, d aux beaucoup dapproximations qui ont t employes, des rsultats moins performants mais valides sont
obtenus avec la simulation : tS=x s, dpassement=15%. Ils sont montrs dans la Figure 23 :
Figure 23 : Rgulation de la position de la gouverne
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 16/38
4.1.c) Systme complet
Comme il a t signal, la rgulation de vitesse de la machine lectrique est assez rapide pour ne pas perturber la
boucle de position. Cest pourquoi la rgulation de position ne change pas pour lensemble et tout le systme fonctionne
correctement avec les mmes caractristiques que dans le cas prcdant.
Finalement, une rfrence de position, correspondant lEHA pendant une partie critique de la mission durgence, a t
gnre afin de tester la rgulation. Les saturations pour les rfrences ont t fixes pour la vitesse du moteur +x/-x rad/s,
pour le couple lectromagntique x Nm et pour la tension de phase 135 V. Avec ces contraintes, les rsultats obtenus
sont les montrs dans la Figure 24 :
Figure 24 : Position de la gouverne et puissance pour la mission de secours
4.2. Rgulation du systme
Le systme peut tre divis en trois parties connectes en parallle : la RAT ou source dnergie, le supercondensateur
avec le hacheur ou source de puissance et les charges lectriques. En ce qui concerne la causalit, les trois sont des
sources de flux puisquils imposent le courant aux lments qui y soient connect. Pourtant, pour raliser une connexion en
parallle, il est forcment ncessaire une source de tension.
La solution qui sera prise, cest dajouter une source deffort en parallle, le condensateur de bus, qui va imposer la
tension et les trois systmes autour lui imposeront le courant. Vis--vis de la rgulation, lensemble source de puissance
avec le condensateur (SC-H-C) sera contrl en tension et la RAT sera commande en courant, comme il est montr dans la
Figure 25 :
Figure 25 : Causalit et rgulation du systme
De cette faon, la tension de rseau sera fixe 270 V. Les charges imposent la puissance et le courant de manire
indpendante au systme et ils ne peuvent donc pas tre rgls. De mme, la RAT peut aussi imposer une puissance et un
courant quelconques, mais cette fois avec une valeur rglable (avec un maximum) grce la rgulation de courant.
Finalement, puisque le SC-H-C fixe la tension, le courant et la puissance lui seront imposs, ce qui provoque une variation
de la tension du SC non contrle et qui peut causer une dstabilisation du systme. Cest pourquoi le degr de libert qui
reste, le courant/la puissance de la RAT, sera utilis pour assurer un bon tat de charge de SC. Cela sera ralis en utilisant
la puissance maximale disponible dans le vent (MPPT ou Maximum Power Point Tracking) le plus de temps possible afin de
minimiser le dimensionnement de la turbine.
Une fois que les charges et leur rgulation ont t expliques, la rgulation de tension de bus sera prsente dabord,
suivi par la rgulation de courant RAT et le calcul de cette rfrence.
4.3. Rgulation de tension de bus
4.3.a) Rgulation de courant supercondensateur
Lensemble SC-hacheur impose un courant ISTOCK = I2 (voir Figure 14) tel que la tension de bus vaille 270 V pendant
toute la mission. Pour cela, le courant lentre du hacheur ISC = I1 (voir Figure 14) sera contrl par moyen du rapport
cyclique du hacheur . Le modle instantan de la Figure 15 sera utilis.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 17/38
Le rgulateur qui sera employ est un IP, similaire au PI mais avec un dpassement plus faible grce lannulation des
zros du systme quivalent en boucle ferme. Ses paramtres seront calculs afin davoir un temps dtablissement de x
ms et un dpassement du 1.5% en boucle ferme.
Ensuite, le modle moyen a t utilis (voir Figure 15). Les rsultats de simulation pour le modle instantan et moyen
sont montrs dans la Figure 26. Une bonne rgulation est obtenue avec des oscillations de courant comme diffrence entre
les modles.
Figure 26 : Rgulation de courant du SC (modle moyen et instantan)
4.3.b) Rgulation de tension
Un rgulateur PI et des compensations du courant de charges et du courant provenant de la RAT seront implments.
Les paramtres du PI seront calculs afin davoir un temps dtablissement de x ms et un dpassement du 1.5% en boucle
ferme.
Pour reprsenter le reste du circuit (voir Figure 14), cest--dire, la RAT avec les charges, une source de courant sera
employe. Des variations de courant leves et instantanes seront modlises afin de commander la tension pour une
situation plus dfavorable que la relle. Les rsultats de simulation sont montrs dans la Figure 27 pour le modle instantan
et moyen, gauche le courant du SC et droite la tension de bus. Les faibles diffrences qui existent entre les tensions des
deux modles justifient lutilisation du modle moyen dans la suite.
Figure 27 : Rgulation de la tension de bus
4.4. Gestion MPPT (Maximum Power Point Tracking)
Comme il a t mentionn et il peut tre observ avec la rgulation de tension de bus, le courant fourni par le SC a une
valeur qui dpend des courants ICH et IRAT et, du coup, aussi la tension du SC. Pour contrler ltat de charge du SC, le
courant IRAT doit tre donc contrl, ce qui sera expliqu dans le paragraphe II.4.4.b.
Ensuite, la valeur pour la rfrence de courant dans cette rgulation sera dfinie. En effet, nous pouvons faire varier la
puissance dlivre par la RAT, avec une limite suprieure en fonction de la puissance disponible dans lair. La dtermination
de cette puissance est trs importante pour minimiser le dimensionnement de la RAT et assurer un bon fonctionnement du
systme. Cela sera analys dans le paragraphe II.4.4.c.
4.4.a) Turbine olienne
Pour vrifier le correct fonctionnement du modle de la turbine, des simulations avec des diffrentes valeurs de vitesse
et hauteur de lavion (puissance disponible) et des diffrentes valeurs du couple rsistif la sortie de la turbine (puissance
requise) ont t ralises. La puissance de sortie reste constante, elle ne dpend pas de la vitesse de la turbine. Pourtant, la
puissance dentre dpend de la puissance disponible mais aussi de la vitesse de la turbine de la faon suivante :
Figure 28 [Ref1]: Puissance absorbe par la turbine
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 18/38
videment, la diffrence entre ces deux puissances se traduit en une variation dnergie cintique de la turbine et, par
consquent, une variation de la puissance quelle absorbe jusqu ce que lquilibre soit trouv. D la forme des courbes
de la Figure 41, les parties situes droite du maximum sont stables et il y aura intrt y rester. De mme, une puissance
de charge ne devra jamais dpasser la puissance disponible (le maximum) puisque cela provoquerait un arrt dfinitif de la
RAT et de la gnration lectrique.
4.4.b) Rgulation de courant IRAT
Lobjectif est de contrler le courant continu IRAT la sortie du redresseur, qui est proportionnel la puissance fournie.
Le degr de libert utilis sera la tension dexcitation de la machine synchrone principale, qui fait varier le courant dexcitation
et finalement le courant de sortie IRAT (voir le systme, Figure 6).
Deux tapes
Dabord, une rgulation en cascade a t essaye. Deux modles linaires de la machines, en ngligeant les
perturbations, et deux rgulateurs PI ont t utiliss pour la commande mais avec des trop de pertes dans le circuit
dexcitation.
Ensuite, une commande en couple en employant la transformation de courants en d,q a t employe, avec des
rsultats toujours mauvais.
Dailleurs, le problme est que le courant de sortie du gnrateur lectrique a une composante ISD beaucoup plus leve
quISQ, et par consquent, il faut un trop grand courant dexcitation pour gnrer le couple ncessaire :
SQ EXC SF P
I I M N C = 2 / 3
Afin de rsoudre ce problme, jai chang le rapport du transformateur. Avec laugmentation du rapport, ISQ augmente
avec une rduction de pertes mais les perturbations sur le sinus VS deviennent trop leves. En outre, une machine ples
saillantes a t aussi utilise, des compensations et des condensateurs ont t ajouts mais toujours avec trop de pertes
ou une mauvaise commande.
Une tape
Finalement, une option moins thorique a t envisage. Elle consiste en trouver la fonction transfert de deuxime ordre
qui se ressemble le plus au comportement du systme. Avec ce but, un chelon de tension dexcitation a t appliqu et une
analyse de la rponse IRAT a t ralis. Le rgulateur utilis pour commande ce systme possde une compensation de
ples, un ple rel et un intgrateur :
) (
) 2 (
) (
2 2
A p p
p p k
p R
n n
RAT
+
+ +
=
Avec les paramtres A=x et k=x, le temps dtablissement est x ms et lquivalent dun systme de premire ordre est
retrouv en boucle ferme :
) )( ( b p a p
b a
I
I
RATref
RAT
+ +
=
Cette rgulation a t teste pour des diffrents courants pour des puissances dlivres de valeur PMIN, PMOY et PMAX
avec des bons rsultats, comme il est montr dans la Figure 29. Ce transitoire initial nexiste pas dans la ralit parce quun
dmarrage plus lent et contrl est ralis. Le problme de cette rgulation est quil ny a quune tape et le courant
dexcitation nest pas contrl. Pourtant, il ne sobserve pas des valeurs dangereuses et cette rgulation sera utilise pour
pouvoir continuer avec la gestion du systme.
Figure 29 : Rgulation de courant IRAT
4.4.c) Systme complet
Une fois que la RAT peut dlivrer la puissance dsire dans chaque instant en tenant en compte la limite de la
puissance disponible, il faut trouver la meilleure rfrence pour ce courant. Il faudra donc estimer la valeur maximale de
puissance qui peut tre fournie dans chaque moment, placer la turbine dans la partie stable sans dpasser jamais cette
valeur maximale et laborer la mthode pour grer le systme. De plus, si la turbine se fait fonctionner la plus part du temps
prs du point optimale, ses dimensionnes pourront tre minimises.
Calcul de la puissance maximale
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 19/38
Dabord, la puissance maximale absorbe par la turbine sera calcule, pour ensuite enlever les pertes dans la
gnration. Dune faon approxime puisque la hauteur na pas t prise en compte, les maxima se calculent partir de la
courbe et dans la partie signale dans la Figure 28.
Pour le calcul de cette puissance maximale, la vitesse VCAS et la hauteur h sont connues et par consquent, et VT
aussi (voir section II.3.1). Il se ralise de la manire suivante :
1. Calcul de la puissance maximale P1 comme sil ny avait pas dangle de calage variable, cest--dire la courbe
discontinue dans la Figure 28 (avec =0) et la vitesse de la turbine correspondante 1. Comme =0, la vitesse de la
turbine est variable pour que = OPT et, du coup, CP=CPOPT (valeurs maximales).
T
T
P T T
R
v
et C v S P
= =
1
3
1
2
1
2. Calcul de la puissance P2 pour une vitesse de turbine 2=Tbute. Langle aussi vaut 0 dans ce cas ; en effet, il est
juste sur le point limite, et varie en fonction des conditions dentre.
P T T P
T
Tbute T
C v S P f C
V
R
= = =
=
3
2
2
1
) 0 , (
3. La puissance P1 sera toujours plus grande que P2 mais, d la supposition dun angle de calage =0, elle ne sera
pas toujours la relle.
Tbute OPT OPT Tbute
OPT OPT Tbute
P P
P P
= = >
= = <
,
,
2 1
1 1 1
4. Une fois que la puissance optimale fournie par la turbine a t calcule, les pertes de la bote de vitesse seront
enleves dabord :
2
= f P
BV
5. Ensuite, les pertes de la machine synchrone seront ajoutes. Elles ont t estimes de faon exprimentale, en
plaant le systme travailler dans le point optimal pour plusieurs puissances. Aprs, une interpolation de
deuxime ordre a t ralise afin de pouvoir calculer la puissance de sortie en fonction de celle dentre.
6. Finalement, pour que la turbine ne puisse pas se situer trs proche de la partie instable ( gauche du point
optimale) et y tomber cause des perturbations, un coefficient de scurit de 0.99 sera appliqu la puissance
obtenue la fin. Ainsi, comme la rfrence sera toujours fixe une valeur plus petite que cette puissance, la
turbine restera dans la partie droite, avec une stabilit garantie.
Gestion MPPT/Puissance requise
Les donnes dentre pour gnrer la rfrence seront la puissance maximale qui peut tre fournie par lensemble RAT
POPT (dj calcule), la puissance demande par les charges dans chaque instant PCH (mesure), et la tension du
supercondensateur VSC (mesure).
La tension du SC sera lentre dun rgulateur dhystrsis avec des limites pour la tension maximale et minimale. Pour
garantir un bon fonctionnement du SC et une scurit au niveau de lnergie stocke, ltat de charge sera limit entre le
75% et 90% de lnergie totale, ce qui correspond une tension entre VMIN et VMAX respectivement [Ref1]. La sortie du
rgulateur sera donc une valeur binaire qui dtermine si le SC est train de passer de VMIN VMAX (en charge) ou de VMAX
VMIN (en dcharge).
Figure 30 : Simulation AMESim de la gestion MPPT/Puissance requise
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 20/38
Lide de la rgulation consiste en favoriser ltat de charge suprieur puisquil est plus stable si jamais il y a des
problmes pas prvus. Ainsi, le cycle de charge aura lieu plus rapidement que le cycle de dcharge, o la rfrence de
puissance dans la rgulation peut avoir deux valeurs diffrentes, savoir la puissance optimale (MPPT on) ou la puissance
demande par les charges (MPPT off) :
Charge : PREF=POPT. La puissance dlivre par la RAT est quasiment constante et varie uniquement avec les conditions
de vol de lavion. Mme si la puissance demande par les charges est trs variable et dpassera certainement cette
valeur optimale, sa valeur moyenne est plus petite et une charge du SC sera observe en moyenne.
Dcharge : Si PCH<POPT, alors PREF=PCH, Si PCH>POPT, alors PREF=POPT
La puissance fournie par la RAT est normalement la puissance demande par les charges et la tension du SC ne
variera quasiment pas. Pourtant, quand cette puissance requise dpasse la valeur de puissance optimale, la RAT nest
plus capable de la fournir et elle ne fournira que la puissance optimale, avec une dcharge du SC.
Les rsultats de simulation sont montrs dans la Figure 30. Les stratgies de commande pendant les tats de charge et
dcharge, avec le MPPT on et off pour les puissances de la RAT et la turbine, peuvent tre observs. Les variations de la
puissance dlivre avec les petits changes de vitesse grce la variation de langle de calage des ples, en restant toujours
dans la partie stable de la courbe (voir Figure 28) doivent aussi tre signales.
4.5. Dynamique
La justification du choix des caractristiques dynamiques des rgulations, ainsi comme la contribution de chaque
lment pour fournir la puissance demande, dans le domaine frquentiel, seront expliques dans ce paragraphe.
En ce qui concerne la rgulation de la tension de bus, la boucle de courant du SC et la boucle de tension de bus doivent
tre le plus rapide possible afin de minimiser le dimensionnement du condensateur de bus. Le temps dtablissement obtenu
pour la boucle de courant est donc t1 ms et, afin de sparer les modes, et de t2 ms pour la boucle de tension.
Quant la rgulation du courant IRAT, il doit stablir plus lentement que la tension de bus pour ne pas perturber cette
tension mais, en mme temps, il doit tre rapide afin de contribuer aux transitoires de puissance de charge pendant le MPPT
off. De cette faon, une valeur de temps dtablissement gale t3 ms est choisie :
MPPT on MPPT off Frquence de
coupure
RAT Basse frquence Basse frquence
Moyenne frquence
F3
SC Basse frquence
Haute frquence
Haute frquence F1
CBUS Trs haute frquence Trs haute frquence
Tableau 3 : Rponse frquentielle du systme
En effet, quand le MPPT est actif (voir Tableau 3) :
La RAT fourni la puissance optimale qui ne correspond pas avec la puissance moyenne demande.
Le supercondensateur fourni le reste de la puissance ncessaire, y compris une composante continue qui provoque
sa charge ou dcharge, mais il est limit par sa frquence de coupure de F1.
Finalement, le condensateur fourni le reste de la puissance demande, celle avec une frquence suprieure F1
approximativement.
De mme, quand le MPPT es inactif (Tableau 3) :
La RAT suit la puissance demande par les charges mais elle est limite par sa frquence de coupure F3.
Le supercondensateur fourni la puissance de frquence comprise entre F3 et F1 peu prs, sans subir aucun
change dans sa tension en valeur moyenne.
Le condensateur de bus travail de mme manire quavec le MPPT actif, en fournissant la trs haute frquence.
5. MISSION DE SECOURS
La mission durgence est dfinie dans le paragraphe I.2.2 avec une dure d peu prs 30min. Pourtant, le temps de
simulation tant trs haut, il faut faire attention ne pas raliser de calculs redondants. Dans ce cadre, une priode de 140s,
pendant le temps le plus reprsentative sera simul.
Cette priode correspond aux 140 dernires secondes de la mission parce quelle reprsente lapproche du sol jusqu
la dconnexion de la RAT, la situation la plus critique. Effectivement, pendant que lavion sapproche du sol, des charges
comme les actionneurs de commande de vol ou le train datterrissage demandent une plus haute puissance. En plus, comme
la vitesse de lavion est plus faible, lnergie disponible est aussi plus faible.
Une vitesse de lavion constante dans une valeur trs basse de 140 nuds et une puissance requise fortement variable
seront donc choisies pour la simulation. Les rsultats de simulation sont montrs dans la Figure 31 :
Des diffrents points peuvent tre signals :
La tension de bus subit des variations plus grandes lorsque la puissance des charges varie trs rapidement. En tout
cas, la valeur de 270 V est rapidement tablie grce la rapide dynamique. De mme, ces variations natteignent
pas des limites trs leves et la valeur maximale de 277 V, un 2.6% de diffrence par rapport la tension
nominale, reste dans les limites des normes dAirbus.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 21/38
Le cycle dhystrsis de la tension du SC est bien implment. Cette tension reste entre les limites de 216 V et 237
V pendant toute la dure de la mission, lexception du final o, avec la puissance requise par les charges trop
leve, la stratgie MPPT narrive pas faire monter la tension. Pourtant, cette diminution nest pas importante
puisque la valeur atteinte ne pose aucun problme de fonctionnement et, en plus, la RAT est sur le point dtre
retire.
Figure 31 : Simulation AMESim de la mission de secours
La stratgie de gestion peut tre observe dans la troisime et quatrime figure : lorsque le SC est en charge, la
puissance absorbe par la turbina et la puissance dlivre par la RAT sont les optimales. En outre, lorsque le SC
est en dcharge, la puissance dlivre par la RAT suit la puissance des charges sans une variation apprciable de
la tension du SC (voir priode 107s-114s approximativement) sauf quand cette puissance demande excde la
puissance optimale disponible et la puissance dlivre devient la puissance optimale, avec une diminution de la
tension du SC (voir le pic de puissance dans le priode 104s-105s).
La vitesse reste constante et gale au point optimal lorsque le MPPT est actif. Lorsque le MPPT est inactif, les
variations de puissance dsires sont ralises avec une faible variation de la vitesse et toujours loin de linstabilit.
La dernire figure sert dimensionner le SC et le hacheur en termes de courant. Ainsi, le courant du SC atteint une
valeur de x pour les conditions les plus critiques.
6. CONCLUSION
En plus de la simplicit du systme lie aux variables continues, plusieurs autres avantages sont retrouvs pour notre
systme hybride RAT - batterie de super condensateurs avec cette stratgie de commande par rapport au systme original
avec la RAT seule :
Il y a une bonne rgulation de la tension de bus avec, par consquent, une bonne qualit du rseau.
La rgulation par hystrsis de la tension du SC assure une disponibilit nergtique dau moins 75% de lnergie
totale du SC et ainsi, un bon fonctionnement est garanti pendant la situation durgence envisage et une prvention
au cas o il y aurait des problmes pas prvus. De mme, cette haute tension limite les pertes du SC en assurant
un bon rendement et une plus facile vacuation de la chaleur gnre.
Lhybridation de la source de puissance avec la commande MPPT de la RAT permet datteindre une rduction de
35% du rayon de la turbine et la puissance du gnrateur lectrique. De cette manire, la masse totale du systme
se verra rduite. Dune faon trs approxime, les masses peuvent tre estimes comme x kg pour le systme
original et x kg pour le systme hybride, cest--dire une rduction de x kg ou 31%.
La limitation de la puissance dlivre par la RAT au 99% de la puissance optimale vite le possible dcrochage de
celle-ci mme dans le cas dune surcharge excessive. En effet, la RAT travaille tout le temps dans la partie stable
de la courbe puissance-vitesse, une vitesse plus grande que la vitesse dans le point optimale Topt et avec la
marge de scurit. Pourtant, une surestimation de cette puissance optimale calcule pourrait conduire demand
trop de puissance la RAT et son dcrochage. Comme autre mesure de scurit, une rduction rapide du courant
de rfrence devra se raliser si la vitesse de la turbine atteint des valeurs plus basses que Topt afin que la vitesse
augmente encore jusqu des valeurs stables. Pendant, le systme de stockage assurera la fourniture dnergie.
Quant aux dsavantages, la fiabilit globale sera lgrement rduite et le systme deviendra plus dpendant de
llectronique de puissance.
En rsum, mme si la stratgie de commande ne respecte pas le principe dhybridation de base, avec la sparation de
puissances basses et hautes frquences, une trs bonne utilisation de la RAT avec le MPPT et une grande disponibilit du
stockage sont retrouves grce cette rgulation. Toutes ces caractristiques et surtout une diminution de la masse trs
importante, nous conduisent considrer ce systme meilleur que le systme utilis actuellement avec la RAT seule et il
devra tre compar avec le systme avec la PAC qui sera analys dans la suite.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 22/38
III. PILE A COMBUSTIBLE (PAC)
Dans ce chapitre, une pile combustible et une batterie de supercondensateurs sont utilises comme source durgence
pour dlivrer la puissance requise par les charges essentielles dans chaque instant. Comme il a t signal, cette
hybridation, installe au sein dun rseau continu, a plusieurs avantages par rapport au systme existant actuellement avec
une RAT seule et un rseau alternatif : qualit et stabilit du rseau, simplicit de contrle, rduction de la masse du
systme, apparition de variables optimiser (comme la puissance fournir par chaque source), rversibilit des charges et
meilleur fonctionnement des sources.
Afin de valider que tous ces avantages sont en effet des amliorations, la modlisation de la PAC, son
dimensionnement, des commandes, des simulations et des optimisations seront raliss laide des logiciels LMS AMESim
(de simulation systme), Optimus (doptimisation) et Matlab. Pourtant, le but de ltude tant effectuer une conception
systme, il ny aura pas danalyses trs approfondis et, la rgulation globale et loptimisation seront les points principaux
suivre.
Avant de commencer, le systme sera prsent. Puisque la PAC est le seule lment avoir chang, elle sera dcrite
en dtail, y compris ses caractristiques, son dimensionnement, sa modlisation et sa commande. Dabord, tous les
lments seront grossirement dimensionns, en supposant quil ny a pas de couplage entre eux et la simulation de la
mission durgence sera ralise. Ensuite, loptimisation de la masse et la consommation fixera les paramtres optimaux et la
simulation de toute la mission sera relance. Finalement, des conclusions seront extraites.
1. PRESENTATION DU SYSTEME
Les trois parties du systme peuvent tre bien diffrencies dans la figure 32. La PAC, source dnergie, est situe en
parallle avec le supercondensateur, source de puissance afin de fournir les charges lectriques. Des convertisseurs
statiques DC/DC sont ncessaires pour lier les sources au rseau continu et un condensateur, ajout au rseau, filtre les
harmoniques de courant et tient une valeur de tension quasiment constante et gale 270 V.
Figure 32 [Ref8] : Rseau de secours avec la PAC
La PAC utilise le combustible stock dans le rservoir pour gnrer la puissance lectrique ncessaire. Un hacheur doit
tre ajout entre la PAC et le rseau cause de la diffrence de tension, ce qui va faire possible lutilisation du degr de
libert quil apporte (le rapport cyclique) pour rguler le courant de la PAC et, ainsi, la puissance dlivre.
Les charges lectriques restent, bien entendu, les mmes puisque elles sont imposes pour notre systme. De mme,
le systme dhybridation ne va pas changer de forme.
Quant la masse du systme, elle sera diminue par rapport au systme original utilis actuellement pour le dernier
secours grce lhybridation installe et la suppression du gnrateur lectrique tournant.
2. CARACTERISATION DE LA PAC
2.1. Description
2.1.a) Choix de la technologie PEM
Une pile combustible utilise la raction chimique dun combustible avec un oxydant en prsence dun lectrolyte pour
obtenir de llectricit, en produisant en mme temps des dchets. Selon la technologie et les diffrents combustibles
(comme lhydrogne, les hydrocarbures ou les alcools) et oxydants (comme loxygne ou le chlore), il existe plusieurs types
de piles combustible.
La pile combustible PEM (Proton Exchange Membrane), qui emploie lhydrogne comme combustible et loxygne
comme oxydant, sera utilise dans notre cas. Les raisons sont que, grce une trs basse temprature de fonctionnement
(plus petite que 80C), elle peut tre dmarre tr s rapidement et il y a moins de corrosion, deux avantages vitaux pour le
domaine aronautique et la mission durgence. En plus, il ny a pas de dchets polluants et la technologie PEM est dj
assez dveloppe et a t dj tudie pour des applications aronautiques dans lUnion Europenne avec le projet de
recherche CELINA (fuel CELL application In a New configured Aircfraft) [Ref2]. Pourtant, des dsavantages sont aussi
retrouvs : la technologie est chre, il faut avoir des ractifs trs purs et, cause de la faible temprature, la chaleur possde
une faible exergie et la cognration nest pas possible. Un autre inconvnient de lhydrogne est sa faible densit, mme si
des rservoirs haute pression, qui font augmenter la masse totale, seront utiliss.
Dans une pile combustible PEM, les ractifs sont lhydrogne et loxygne et le seul produit est leau. La simple
raction chimique qui a lieu est la suivante :
chaleur lectricit O H O H + + +
2 2 2
2 / 1
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 23/38
La transformation dnergie dans cette raction chimique, 25C et par mole dhydrogne, o G reprsente lnergie
lectrique qui pourrait tre extraites idalement, ainsi que le rendement idal sont montrs l-dessous :
% 83 ] / [ 62 . 48 35 . 237 97 . 285
2
=
= + = + =
H
G
H mol kJ ou S T G H
th
2.1.b) Modlisation
Les Rfrences 5, 6 et 7 [Ref5, Ref6, Ref7] ont t utilises pour modliser la PAC.
Thoriquement, toute lnergie G est utilisable et pourrait donc tre transform en nergie lectrique. Cette conversion
de la puissance chimique en lectrique peut tre reprsente par les llment transformateur en Bond Graph avec les
expressions suivantes, o les valeurs correspondent la temprature de 25C :
I E J G P
th th
= =
De cette manire, leffort (G ou E0) est constant et la puissance idale fournie dpend proportionnellement du flux (J ou
I). Pourtant, puisque le flux dhydrogne ne peut pas varier trs rapidement cause des lments auxiliaires de rgulation de
la PAC, elle aura une dynamique assez lente et ne pourra pas rpondre toute seule aux rapides variations de puissance de
charge. Une raison sajoute donc celle de la rduction de masse pour raliser lhybridation : la faible dynamique de la PAC
doit tre complte par un autre lment plus rapide comme la batterie de supercondensateurs. Le fait que la PAC soit
limite en rponse dynamique ne sera pas considr dans les modles parce que, simplement, elle ne sera pas demande
fournir des hautes frquences.
A cette tension thorique Eth, il faut ajouter des diffrentes pertes, qui augmentent avec la densit de courant :
Pertes dactivation : A faible densit de courant, la polarisation dactivation est dominante. D la raction
lectrochimique, les ractifs doivent dpasser une barrire dactivation et ces pertes sont dcrites par lquation
suivante
0 0
ln ln
J
J J
nF
T R
i
i I
nF
T R
n u n u
act
Pertes ohmiques : Ces pertes sont dues la rsistance que rencontre le flux dions et lectrons en traversant leurs
chemins. Elles suivent la loi dOhm
I r J R I
S
R
I
S
l
ohm
= = =
Pertes par diffusion : Elles ne seront pas considres puisquelles occurrent pour des valeurs de densit de courant
leves, suprieures 8000 A/m
2
, qui seront vites cause du faible rendement.
De cette faon, la tension de sortie pour une seule cellule peut tre calcule en fonction du courant I ou de la densit de
courant J de la manire suivante :
0
0
0
0 0
ln ln
J
J J
A J R E
J S
J S I
nF
T R
I
S
R
E E V
n n u
ohm act cell
= =
Figure 33 [Ref7] : Tension de sortie dune cellule en fonction de la densit de courant
Pourtant, tant la tension de sortie trs faible, il y a besoin de mettre plusieurs cellules en parallle, reprsent par N
cellules. Ainsi, il y aura deux degr de libert pour dfinir les caractristiques de la PAC : la surface S et le nombre de
cellules N. Naturellement, ils seront limit cause des raisons technologiques aux valeurs S<800 cm
2
et N<400.
Lexpression de la tension de sortie pour la pile combustible devient :
nF
T R
A avec
J S
J S I
A I
S
R
E N V
u n
PAC
), ln (
0
0
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 24/38
Le reste de paramtres de la PAC sont des constantes dont les valeurs sont fixes laide du logiciel Matlab. Les
paramtres et les graphiques de la tension de sortie, la puissance de sortie et le rendement en fonction du courant pour des
diffrentes valeurs de la surface et du nombre de cellules mais pour la mme puissance sont montrs dans la Figure 34 :
Figure 34 : Tension de sortie, puissance de sortie et rendement de la PAC
Les expressions de la tension de sortie, puissance de sortie et rendement de la PAC en fonction de la densit de
courant J sont plus simples et seront utilises dsormais :
V
J
J J
A J R E
V N
V
J
J J
A J R E J S N P
J
J J
A J R E N V
n
PAC
PAC
n
PAC
n
PAC
48 . 1
ln
48 . 1
), ln ( ), ln (
0
0
0
0
0
0
=
Dans ces expressions, il peut tre apprci facilement que le rendement ne dpend que du J et il y a donc intrt
limiter cette variable. La limite va tre impose J<8000 A/m
2
et par consquent, le rendement minimal sera de 37.10%
dans tous les cas. De mme, la puissance maximale que la PAC peut dlivrer dpend uniquement du produit N fois S, cest-
-dire, de son volume. Les quatre cas reprsents dans la Figure 35 ont la mme puissance maximale, gale 51.8 kW
puisque ce produit vaut 10.17 m
2
pour tous les quatre cas. Pourtant, la limitation du rendement va aussi limiter la puissance
maximale, 44.69 kW dans les quatre cas reprsents.
Figure 35 : Tension de sortie, puissance de sortie et rendement de la PAC
2.2. Dimensionnement
Le dimensionnement de la pile combustible sera ralis par optimisation multicritre dans lintrt de minimiser la
masse et la consommation dhydrogne de la PAC. Comme il a t dj signal, la surface S et le nombre de cellules N
peuvent tre changs pour dfinir la PAC et par consquent toutes ses caractristiques, y compris nos deux objectifs
minimiser. Avant de raliser loptimisation, la puissance dlivrer sera distribue entre les sources de puissance, cest--
dire, la PAC, le supercondensateur et le condensateur afin de les dimensionner.
2.2.a) Distribution des puissances
Comme premire approximation, chaque lment sera considr comme isol et, du coup, le couplage avec le reste du
systme ne sera pas pris en compte. En effet, il y a une rgulation de la tension du SC qui rduira srement la valeur de sa
capacit pendant le procs doptimisation.
Bien entendu, la totalit du spectre de frquence de charge doit tre dlivre aux charges essentielles. Etant donn que
la PAC ne peut suivre que des rfrences de courant basse frquence, la frquence que spare la dynamique des sources
sera fixe 0.05 Hz. De cette faon, la PAC fournira les harmoniques de puissance de moins de 0.05 Hz et le
supercondensateur le reste ; pourtant, la dynamique du SC tant aussi limite par la rgulation de courant, le condensateur
devra tre capable de fournir les hautes frquences.
En considrant ce filtrage, la puissance demande la pile combustible atteint x kW, mais elle sera limite x kW
sans poser des problmes la stabilit globale. En prenant en compte les pertes du hacheur et la puissance requise par les
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 25/38
lments auxiliaires de la PAC (alimentation de gaz, gestion de lhydratation et la temprature), la puissance maximale de
la PAC, utile pour le dimensionnement sera d peu prs x kW. De mme, la puissance demande au SC atteint quasiment
le x kW et la valeur pour le dimensionnement, une fois que les pertes ont t considres, est x kW. Quant lnergie, x kJ
devront tre considrs pour le SC et x J pour le condensateur de bus.
Pour le calcul de la capacit du SC, les limites de tension seront maintenues, comme dans le cas de la RAT, VMIN et
VMAX. La capacit vaudra donc :
2
min
2
max
2
V V
E
C
SC
=
La capacit de bus sera calcule de la mme faon. Pour cela, les limites de tension seront limites 260 et 280 V.
2
min
2
max
2
V V
E
C
BUS
=
2.2.b) Optimisation
Dans ce paragraphe, le problme doptimisation de la masse et la consommation de la PAC sera pos et rsolu. Afin de
simplifier les calculs, le point de fonctionnement sera constant, cest--dire, toutes les variables, savoir la puissance de
sortie PPAC, le courant IPAC, la tension de sortie VPAC et la densit de courant JPAC seront aussi des constants. De cette
manire, pour ce point de fonctionnement, la puissance de sortie sera choisie comme la puissance maximale qui peut tre
atteinte durant toute la mission de secours, de sorte que le courant et la densit de courant reprsenteront, eux aussi, leurs
valeurs maximales et la tension reprsentera sa valeur minimale. En effet, en tenant en compte quil y aura un hacheur la
sortie, ce sont bien le courant maximale et la tension minimale qui vont dterminer les caractristiques du convertisseur et il
naura pas des problmes avec les valeurs de tension maximale et du courant minimale en fonctionnement plus basse
puissance, qui seront, en tout cas, pas trs loin des valeurs puissance maximale.
Ensuite, les variables vis--vis de loptimisation et les quations qui mettent en relation les variables, les contraintes et
les objectifs vont tre prsentes. Les contraintes correspondent aux limitations technologiques (N et S) ou aux limitations de
rendement (la tension minimale dentre du hacheur V et la densit de courant J), le calcul de la masse vient de la Rfrence
2 [Ref2] et la consommation est calcule comme le flux dhydrogne fois le nombre de cellules (en moles H2/s).
Comme il peut tre observ, il y a cinq variables optimiser mais il existe des relations entre eux, cest--dire, ils ne
peuvent pas tre toutes fixes la fois. Effectivement, il y a deux degr de libert finalement et, comme il a t signal, si par
exemple N et S sont fixes, la tension de sortie, le courant, la densit de courant, la masse et la consommation peuvent tre
calculs et la PAC est compltement caractrise. Deux variables quelconques entre les cinq existantes pourront donc tre
retenues pour loptimisation. Ainsi, les variables N et J seront choisies comme degrs de liberts parce quelles font le
problme plus simple et, les quations pour les objectifs et les contraintes, qui doivent maintenant ntre en fonction que de
N et J, deviennent :
Le problme doptimisation reste trs simple et sera rapidement rsolu avec le logiciel Optimus. Lalgorithme gntique
NSEA+ sera utilis par Optimus pour obtenir le front de Pareto, qui est montr dans la Figure 36. Le point choisi reste en
compromis avec les deux objectifs et, en mme temps, la tension dans ce point est proche 270 V mais sans la dpasser,
ce qui permettra dutiliser un hacheur lvateur avec un bon rendement.
Figure 36 : Front Pareto masse-consommation de la PAC
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 26/38
Une fois que la PAC a t dimensionne avec ses deux paramtres fixs S=x m
2
et N=x cellules, le point du
fonctionnement puissance minimale, limite x kW, peut tre aussi dfini. Tous les autres points resteront entre les deux
limites montres dans le Tableau 4.
P (kW) V (V) I (A) (%)
PMAX PMAX VMIN IMAX MIN
PMIN PMIN VMAX IMIN MAX
Tableau 4 : Point limites de fonctionnement de la PAC
2.3. Modlisation de la PAC et le hacheur
2.3.a) Pile combustible
La statique de la pile combustible est dfinie par les courbes de la Figure 34 et 35 o la tension de sortie en fonction
du courant est reprsente par lexpression suivante :
nF
T R
A avec
J S
J S I
A I
S
R
E N V
u n PAC
PAC PAC
), ln (
0
0
Cette expression est juste pour tout le rang de courant de la PAC, mais elle peut tre simplifie pour les point du
fonctionnement, qui correspondent aux courants compris entre IMIN et IMAX. Vu que la courbe est trs linaire pour ces
courants, une linarisation autour du I0=0.5(IMIN+IMAX) sera ralise :
PAC PAC PAC PAC
n n
n PAC
I R E V
J S I
A
S
R
N J A
J S I
I A
J S I A E N V =
+ +
+ = ] [ )] ln( ) ln( [
0
0
0
0
0 0
Cette expression nous permettra de modliser la PAC dune manire trs simple, avec une source de tension en parallle
avec une rsistance. Pourtant, il faut dabord vrifier quelle est valide pour notre zone de fonctionnement, ce qui sera ralis
en comparant les deux graphiques, comme montr dans la Figure 37 :
Figure 37 : Courbes du modle logarithmique et linaire de la PAC
Lerreur pour la tension de la PAC est plus petite que 0.05% pour les courants entre IMIN et IMAX, tout fait ngligeable
pour le fonctionnement normal. Par contre, pour des bas courants, qui apparaissent dans le priode transitoire au dmarrage
de la PAC, le modle ne sera pas valide. Etant ltat stationnaire le seul considr durant la mission durgence, ce fait ne
posera donc pas de limitations au modle. De mme, il faut tenir en compte que les pertes dans la rsistance RPAC ne
correspondent pas aux pertes de la PAC mais elles peuvent tre facilement calcules.
En plus des pertes ohmiques et dactivation, les pertes des lments auxiliaires la PAC doivent tre considres (voir
Figure 38). En effet, des procs comme lalimentation en gaz de la pile combustible, la gestion de la temprature, la
pression et lhydratation consomment une partie importante de la puissance lectrique qui provient de la PAC. Elles seront
grossirement estimes comme le 13% du courant IPAC, ce qui provoque que le courant de sortie de la PAC devienne :
PAC PAC AUX L
I I I = = 87 . 0
1
2.3.b) Le hacheur
Le hacheur situ en srie avec la PAC sera un boost ou hacheur lvateur, ce qui impose que la tension de la PAC ne
soit pas trop leve, particulirement, la tension lentre du convertisseur ne devra jamais dpasser les 270 V. Quant au
modle, il sera celui utilis en srie avec le supercondensateur dans le systme avec la RAT (voir section, tant pour le
modle instantan que pour le modle moyen. La seule diffrence sera que dans le cas actuel, le convertisseur nest pas
rversible et, du coup, une diode et un transistor seront uniquement ncessaires.
Le dimensionnement de linductance se ralise de la faon suivante :
MAX DEC
MAX PAC
SC
CVS DEC
MAX PAC
MAX
I f
E
L
L f
E
I
=
1
Pour les pertes, un rendement du 95 % sera considr pour le point puissance maximale et un rendement du 92.5 %
pour le point puissance minimale. Dans notre cas, cela peut tre modlis comme une rsistance variable linairement en
fonction du courant que la traverse.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 27/38
Finalement, le modle moyen utilis sur AMESim pour la PAC suivie par le hacheur est montr dans la Figure 38 :
Figure 38 : Modle AMESim de la PAC avec le hacheur
2.4. Rgulation de courant
Grce au rapport cyclique, degr de libert du convertisseur, la PAC pourra imposer le courant dsir dans chaque
instant. Le courant IL1, qui traverse linductance, sera rgul et un modle non linaire sera utilis.
Figure 39 : Courants et tensions pour le modle moyen (en haut) et pour le modle instantan (en bas)
Le rgulateur qui sera employ est un IP, similaire au PI mais avec un dpassement plus faible grce lannulation des
zros du systme quivalent en boucle ferme. Le systme en boucle ferme aura deux ples rels, a et b pour obtenir une
frquence de coupure de x Hz sans dpassement.
Des simulations pour un chelon de courant pour le modle moyen et instantan ont t ralises. Dans la Figure 39, le
cas du modle moyen (en haut) montre le point puissance minimale et, le modle instantan (en bas), le point puissance
maximale. Le temps dtablissement est tS=x sec. Il peut tre observ que le modle moyen est quivalent au modle
instantan en termes de puissance et sera dsormais utilis. En outre, on peut valider le modle car les rsultats
puissance maximale et minimale correspondent avec ceux calculs thoriquement (voir Tableau 4).
2.5. Gestion du systme
2.5.a) Elments communs
La similitude entre les deux systmes en tude ne rend pas tonnant que des modles dj raliss dans le systme
avec la RAT puissent tre utiliss pour le systme avec la PAC. Dailleurs, le seul lment qui change est la source
dnergie, pendant que la source de puissance, les charges essentielles et le condensateur de bus restent les mmes en ce
qui concerne le modle lectrique. Ceux-ci peuvent tre observs dans la section II.3.4 (caractrisation du
supercondensateur et le hacheur correspondant) et la section II.3.5 et II.3.6 (actionneur lectro hydraulique et charges
lectriques). Par contre, des variations de paramtres ou des rgulations pourraient avoir lieu :
Par rapport aux charges lectriques, il ny aura videment aucun changement de paramtres ou de stratgie de
rgulation. En effet, les charges sont imposes pour notre systme quelque soit la source (PAC, RAT ou une autre)
et cest nous de raliser la conception des sources sans toucher les charges. Pourtant, les charges seront
simules une fois, les rsultats enregistrs dans un fichier de texte qui sera rutilis chaque prochaine simulation,
ce qui va rduire drastiquement le temps de simulation sans changer les rsultats globaux.
Figure 40 : Modle AMESim des charges lectriques
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 28/38
Quant au supercondensateur et au hacheur situ en srie, la valeur de la capacit et de la puissance traiter est
peu prs pareille que pour le cas de la RAT. La tension maximale du supercondensateur sera aussi conserve ainsi
que la bobine et les pertes du convertisseur.
Le dimensionnement de la capacit de bus donne aussi le mme rsultat et de mme, il naura pas de changements
en ce qui concerne le condensateur de bus.
2.5.b) Gestion du systme
Les points plus importants pour fournir les charges essentielles en garantissant la stabilit du systme sont la rgulation
de la tension du condensateur de bus une valeur quasiment constante autour de 270 V et la rgulation de la tension du
super condensateur entre deux valeurs stables. En effet, le condensateur, qui dlivre les hautes frquences, ainsi que le
supercondensateur, qui dlivre les moyennes frquences plus la puissance requise par le condensateur de bus, doivent tre
fournis dune puissance pour rester avec une tension stable.
Comme dans le cas avec la RAT (voir section II.4.2), le condensateur ajout en parallle avec le reste dlments cre la
causalit tension ncessaire. De faon identique aussi au cas prcdant, le courant la sortie de la source de puissance
sera rgul afin de maintenir une tension constante gale 270 V dans le condensateur de bus, cest--dire, une rgulation
de tension de bus sera ralise.
Figure 41 : Gnration du courant de rfrence ILref pour la PAC
Par ailleurs, la source dnergie, dont la disponibilit de puissance nest plus dpendante des caractristiques
environnementales, sera donc capable de fournir une puissance quelconque (avec des limites suprieure et infrieur) dans
tout instant et, du coup, il ny aura plus besoin dune commande MPPT pour chercher le point de puissance optimale. La PAC
sera responsable de maintenir la tension du supercondensateur entre deux limites, ce qui sera ralis dune faon trs
simple avec un rgulateur proportionnel K : un courant proportionnel la diffrence entre la tension du super condensateur et
la tension de rfrence sera ajout au courant requis par les charges et, ensuite, cette valeur sera filtre avec une frquence
de coupure de 0.05 Hz pour dfinir le courant de rfrence de la PAC. La gnration du courant de rfrence pour la PAC
est montre dans la Figure 41.
Puisque pour cette premire simulation, un dimensionnement exact nest pas ncessaire, le paramtre du rgulateur
proportionnel K sera fix 1, une valeur qui fait bien fonctionner le systme et, de mme, la tension de rfrence sera fixe
0.8 fois la tension maximale du supercondensateur. Pourtant, plus tard, avec loptimisation globale, ces deux paramtres
seront changs.
Finalement, il faut se rappeler que le dimensionnement du supercondensateur a t ralis dans le cas dune absence
de couplage entre les lments. Pourtant, linteraction ajoute entre les sources avec cette rgulation est trs positive parce
que, dun ct, une marge pour la puissance de charges est cre au cas o il y aurait une mission anormalement
complique et, dun autre ct, la valeur de la capacit du super condensateur peut tre rduite. Ainsi, dans notre premire
simulation, le SC sera surdimensionn, ce qui sera rsolu avec loptimisation du systme.
3. MISSION DE SECOURS
Une fois que tous les lments ont t modliss et dimensionns et que toutes les rgulations ont t ralises, il ne
nous reste faire que la simulation de lensemble pendant toute la mission de secours. Pourtant, comme il a t expliqu
dans la section II.5 pour la RAT, les 140 dernires secondes sont suffisamment significatives car il sagit de la priode la plus
critique avec latterrissage de lavion et une demande suprieure des charges. En outre, lanalyse du transitoire ntant pas le
but de cette tude, les 10 premires secondes, elles aussi ne seront pas considres. Les rsultats de simulation sont
montrs dans la Figure 42 :
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 29/38
Figure 42 : Simulation AMESim de la mission de secours
Des diffrents points peuvent tre signals :
La tension de bus subit des variations plus grandes lorsque la puissance des charges varie trs rapidement. En tout
cas, la valeur de 270 V est rapidement tablie grce la rapide dynamique. De mme, ces variations natteignent
pas des limites trs leves et la valeur minimale de 263.6 V, un 2.4% de diffrence par rapport la tension
nominale, reste dans les limites des normes dAirbus.
La tension du supercondensateur reste stable autour de la valeur de rfrence de x V pendant toute la dure de la
mission. Il peut tre observ que, lorsque sa tension baisse/monte considrablement, jusquau xMIN/xMAX environ, le
terme de rgulation de tension a une grande influence sur le courant de rfrence de la PAC et la puissance
dlivre par celle-ci augmente/descend mme jusqu la limite de PMAX/PMIN afin de compenser la perte de tension,
sans poser aucun problme au fonctionnement du systme. Par ailleurs, cette faible variation de la tension du
supercondensateur confirme quil a t surdimensionn puisquune variation plus grande est permise.
Dans le troisime graphique, la distribution des puissances est montre. Bien entendu, la puissance fournie par la
PAC la sortie du hacheur (PEN) plus la puissance fournie par le supercondensateur la sortie du hacheur
correspondant (PPUIS) est gal la puissance requise par les charges. De plus, il peut sobserver que la PAC dlivre
une puissance de frquence trs faible et le SC dlivre la moyenne et haute frquence. La trs haute frquence,
fournie par le condensateur de bus, peut tre nglige pour ces considrations.
La puissance la sortie de la pile combustible reste bien entre les deux valeurs pour lesquelles elle tait
dimensionne. De mme, la puissance maximale la sortie du supercondensateur reste proche de x kW, comme
dimensionn.
Dans le quatrime graphique, les pertes de la source dnergie sont montres. En effet, avec un rendement toujours
plus faible que x%, la puissance la sortie de la PAC (en rouge) est beaucoup plus petite que la puissance
disponible dans lhydrogne lie son entropie (en bleu). Ensuite, il y aura les pertes des lments auxiliaires de la
PAC et du hacheur pour finalement obtenir la puissance utile pour les charges (en vert). Le rendement total de la
source dnergie, en considrant toutes les pertes, reste peu variable, entre x% et x%, grandeur importante pour
lanalyse de la consommation qui succde.
En rsum, un fonctionnement performant et une rduction de la masse de lensemble par rapport au systme original
peuvent tre souligns. Pourtant, cette simulation est un premier pas et avant deffectuer une valuation plus dtaill et une
conclusion finale, loptimisation de la masse et de la consommation sur ce modle sera ralise.
4. ETUDE DOPTIMISATION
Dans notre systme, il existe des paramtres, comme ceux des charges, qui sont dj fixs et dautres, comme le
nombre de cellules de la PAC ou la capacit du SC, qui peuvent tre varis par le concepteur. Le mieux serait de
slectionner ces paramtres (qui sappellent variables en langage doptimisation) de sorte que les objectifs, savoir la
masse et la consommation dans notre cas, soient minimiss. Dans un systme dune complexit considrable, un
concepteur qui le connat bien peut tre capable de les calculer pour que le systme marche correctement et se rapprocher
du point optimal mais, pourtant, il narrivera pas trouver exactement loptimum, encore moins sil existe plusieurs objectifs.
Cest pourquoi il faut utiliser un algorithme doptimisation, qui change les paramtres et cherche le point optimal (ou les
points optimaux dans les problmes multi objectifs).
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 30/38
Dans les sections prcdentes, un ensemble de paramtres a t choisi afin dobtenir principalement une basse masse
et un fonctionnement stable. Pourtant, un seul point a t test et il se trouve, srement, loin du front de Pareto.
Loptimisation qui sera ralis trouvera ce front de Pareto, cest--dire, lensemble de points qui dominent une autre solution
quelconque, y compris la solution obtenue antrieurement.
4.1. Le problme doptimisation
Puisque le modle de tout le systme a t ralis sur AMESim, loptimisation a t dabord ralise avec ce logiciel.
Pourtant, les rsultats pour ce cas ne se sont pas montrs satisfaisants, spcialement pour loptimisation multi objectifs et,
du coup, une interface Optimus-AMESim sera gnre.
Dans cette interface, Optimus gre tout ce qui concerne loptimisation. Il gnre les variables (section III.4.a) et lance la
simulation AMESim chaque itration. AMESim calcule tous les paramtres du modle partir de ces variables, ralise la
simulation de la mission de secours et sort les rsultats. Ensuite Optimus vrifie les objectifs (section III.4.b) et les
contraintes (section III.4.c) et gnre nouveau les variables pour la prochaine itration avec lalgorithme doptimisation
gntique NSEA+, qui ne sera pas analyse dans ce texte. Dans cette section III.4.1, la caractrisation du problme
doptimisation sera donc effectue : variables, entres du modle, objectifs et contraintes.
4.1.a) Variables
Les variables sont les paramtres du modle qui seront changs pendant le procs doptimisation afin de minimiser les
objectifs. Les valeurs quelles pourront avoir sont comprises entre deux limites, qui doivent tre bien choisies pour obtenir
des rsultats valides et pas trop loignes pour diminuer le temps de calcul. Les neuf variables avec leurs limites sont
montres dans le Tableau 5 :
La frquence de filtrage f dfini la rpartition de puissance entre la PAC et le SC. En gros, la partie de la puissance
des charges avec une frquence plus haute que f, sera fournie par le SC et le reste par la PAC. Cette frquence ne
peut pas tre trs leve car la PAC est trs limite dynamiquement.
Les variables VPAC et JPAC, qui ont t dcrites prcdemment (voir III.2.2.b), sont fixe dans le point de puissance
maximale. Les deux dfinissent le dimensionnement de la PAC.
La puissance de la PAC est dfinie par le filtrage de la puissance de charge et la puissance ncessaire pour rguler
la tension du SC. Pourtant, il est intressant de limiter cette puissance afin de rduire le dimensionnement de la
PAC et bien connatre le rang de fonctionnement. La puissance moyenne requise par les charges et le SC la
sortie de la PAC est de x kW approximativement et, du coup, la saturation de puissance maximale PMAX doit se
situe un peu en dessus et la saturation de puissance minimale PMIN un peu en dessous afin davoir quelque libert
de fonctionnement et garantir la stabilit.
La batterie de supercondensateur est forme partir de lassociation en srie de NS supercondensateurs de tension
nominale 2.5 V et capacit 350 F, comme utilis pour la RAT. De mme, NP de ces blocs sont mis en parallle pour
obtenir finalement la tension maximale et la capacit dsires. NS sera limit afin de limiter la tension maximale de
la batterie des SC entre x V et x V. Quant au NP, il sera limit 5 car sinon il y a une augmentation de masse
excessive. Il sagit dans les deux cas des variables entires.
La constante K est la responsable de dfinir le courant additionnel qui sera dlivr par la PAC afin de rguler la
tension du SC et la tension de rfrence du SC est dfinie comme
max SC Vref SCref
V K V = (voir Figure 41).
Nom Description Limite infrieure Limite suprieure
f Frquence de filtrage 1 mHz 1 Hz
VPAC Tension minimale la sortie de la PAC x V x V
JPAC Densit de courant maximale dans la PAC 1000 A/m 8000 A/m
PMAX Saturation de puissance maximale de la PAC x kW x kW
PMIN Saturation de puissance minimale de la PAC x kW x kW
NS Nombre de supercondensateurs en srie x x
NP Nombre de supercondensateurs en parallle 1 5
K Constante du rgulateur proportionnel pour VSC 0.1 5
KVref Rapport entre VSCref et VSCmax 0.75 1
Tableau 5 : Variables doptimisation
4.1.b) Objectifs
Les objectives minimiser dans notre systme sont la masse et la consommation dhydrogne, inversement
proportionnelle au rendement du systme. Ces deux variables doivent tre calcules par AMESim partir des variables
dentres et des rsultats.
Consommation dhydrogne
La consommation de combustible en moles est donne par lintgrale du flux dhydrogne J (mol/s) pendant toute la
dure de la mission de secours, savoir 30 min, multipli par le nombre de cellules N :
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 31/38
= = =
min 30
0
min 30
0
2
2
dt I
F
N
dt J N n on Consommati
PAC H
Pourtant, puisque seulement 140 secondes de la mission durgence sont simules, dont les 10 premires correspondent
au transitoire et ne seront donc pas considres, lintgration sera ralise entre 10 et 140 secondes et elle sera tendue
toute la dure :
= =
s
s
PAC H
dt I
s
s
F
N
n on Consommati
140
10
2
130
1800
2
Masse
La masse totale du systme, sans prendre en compte les lments qui ne changent pas, est la somme des diffrents
lments, o des coefficients ont t ajouts pour considrer le poids du packaging et du cblage [Ref1] :
2 2 1
) ( 1 . 1 05 . 1
H CVS SC CVS PAC
M M M M M M Masse + + + + = =
La masse de chaque lment en kg est calcule de la manire suivante :
La masse de la PAC est donne dans la section III.2.2.b :
S N S N S N M
PAC
+ + + + = 2276 . 1 ) 0701 . 0 0236 . 0 ( 94 . 5 ) 1 ( 7502 . 0
[Ref2]
La masse de chaque SC est 60 g. En plus, un coefficient de 1.4 sera utilis pour considrer lempaquetage des SC
et le systme dquilibrage des tensions, donnant une masse totale de la batterie de SC :
P S P S SC
N N N N M = = 084 . 0 06 . 0 4 . 1
[Ref1]
La masse des convertisseurs sera la somme de la masse des lments utiliss pour lvacuation thermique, plus la
masse des interrupteurs, plus la masse des inductances :
L SW TH CVS
M M M M + + =
La masse des lments dvacuation dpend de la puissance vacuer et, par consquent, elle dpend aussi
approximativement de la puissance maximale. Cependant, comme la puissance de fontionnement du convertisseur
2 (celui du SC) est normalement loin de la puissance maximale, lexpression sera change :
max 2
2
max 1
1
210000
0375 . 13 ,
105000
0375 . 13
CVS
TH
CVS
TH
P
M
P
M = =
[Ref2]
Etant donnes les caractristiques de puissance du hacheur 2, la masse des interrupteurs sera peu prs
quivalente celle des lments dvacuation de chaleur. En outre, puisque le hacheur 1 est non rversible, sa
masse des interrupteurs sera peu prs la moiti que la masse du hacheur 2 pour la mme puissance :
max 1
2 1
max 2
2
115500
17 . 7 55 . 0 ,
210000
0375 . 13
CVS
SW SW
CVS
SW
P
M M
P
M = = =
[Ref2]
Finalement, la masse des inductances dpend de la valeur maximale de courant qui les traverse :
4 / 3
max 2 2
4 / 3
max 1 1
) ( 115218 . 0 , ) ( 217634 . 0
L L L L
I M I M = =
[Ref1]
La masse de lhydrogne avec les rservoirs sera estime comme 20 fois la masse de lhydrogne :
2 2 2
0403176 . 0 00100794 . 0 2 20
H H H
n n M = = [Ref2]
4.1.c) Contraintes
La stabilit du systme sera garantie en imposant quelques contraintes afin de limiter la variation des tensions. Des
limites technologiques seront aussi considres pour la PAC. Dautres contraintes moins importantes, pour limiter les pertes
par exemple, pourraient tre envisages mais cela ne sera pas ncessaire car la propre optimisation de la consommation et
la masse liminera ces points. Ainsi, toutes les contraintes utilises sont :
Les limitations technologiques pour le nombre de cellules et la surface de la PAC, si lon considre les progrs
prvus, sont :
2
25 . 0 , 400 m S N
La tension lentre des convertisseurs doit tre limite. Une valeur maximale de 265 V sera impose car il sagit de
des hacheurs lvateurs et la tension lentre doit tre toujours plus petite que la tension de sortie, de 270 V dans
notre cas. Quant la valeur minimale, il est intressant quelle ne soit pas trop faible :
V V V
CVS
265 45
2 , 1
La tension du SC devra rester entre la tension maximale et la moiti de celle-ci, ce qui correspond une profondeur
de dcharge en tension de 50% et assure une disponibilit dnergie plus grande que 25% pendant toute la dure
de la mission. Afin davoir des valeurs communes pour tous les cas et faciliter le problme sur Optimus, la variable
tension de la batterie de SC sera divise par la variable dentre NS, avec la tension de chaque unit de
supercondensateur comme rsultat :
V V V N V N
UNSC S SC S
5 . 2 25 . 1 5 . 2 25 . 1
La tension de bus doit rester quasiment constante autour de 270 V. Les variations permis seront imposes par les
normes dAirbus :
V V V
BUS
285 255
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 32/38
4.1.d) Normalisation
Avant de lancer doptimisation, les contraintes et les objectifs seront valus pour les variables dentres qui ont t
choisies au dbut afin de vrifier quil y a un bon fonctionnement et davoir une ide pour les futures simulations. Cette
simulation avait dj t ralise (voir la section III.3) et les rsultats sont les suivants :
% 100
% 100 % 01 . 22 %, 93 . 20 %, 14 . 15 %, 28 . 19 %, 64 . 22
2 1 2
=
= = = = = =
ion Consonmmat
M M M M M M
T CVS CVS H SC PAC
Les contraintes sont respectes.
Afin damliorer la convergence de loptimisation, les objectifs seront normaliss, en les divisant par les valeurs qui
viennent dtre calcules. Du coup, des valeurs des objectifs plus petites que 1, reprsenteront une amlioration par rapport
au point calcul sans utiliser loptimisation.
4.2. Rsultats doptimisation
4.2.a) Front Pareto
La mission durgence a t simule pour plus de 13000 points, ce qui a donn le front Pareto de la Figure 43. Il montre
lensemble de points qui ne sont pas domins. Il peut sobserver que le point utilis initialement pour les simulations (en
rouge dans la figure) est assez loin du front Pareto et une notable amlioration a donc t obtenue.
Ensuite, cest au concepteur de slectionner un seul point parmi tous ceux du front Pareto partir dun certain critre.
Dans notre cas, les points qui ont approximativement le mme poids pour les deux objectifs seront pris en compte pour
lanalyse, savoir entre 0.3 et 0.7. Les points avec une masse relative comprise entre 0.92 et 1.01 et une consommation
relative comprise entre 0.91 et 0.98 sont donc concerns. Au-del de ces points, il ny a pas dintrt : gauche, une petite
diminution de la masse fait monter beaucoup la consommation et, droite, une petite diminution de la consommation fait
monter beaucoup la masse. De plus, 3 points parmi ces derniers (en vert dans la figure) seront choisis pour tre capables de
comparer plus facilement les rsultats.
4.2.b) Evolution des variables pour le front de Pareto
Lvolution des variables pour les points du front Pareto sera analyse dans cette section. Le but est de voir les
tendances des variables doptimisation afin dtre capable de slectionner un rang de valeurs pour la correcte
paramtrisation du modle. De mme, cela nous aidera mieux comprendre le comportement du systme. Se rappeler que
les point avec des masses relatives entre 0.92 et 1.01 environ, ce qui correspond une consommation relative entre 0.91 et
0.98, seront analyss, ainsi que trois points particuliers.
Les rsultats pour la frquence de rpartition de puissances f (voir Figure 44) montrent que, mme sil y a deux valeurs
loignes du group, une haute frquence est prfre, entre 0.8 et 1 Hz.
Les variables de dimensionnement de la PAC, la tension sa sortie et la densit de courant, sont montrs dans la
Figure 45. Cette fois-ci, une claire tendance vers les tensions leves est observe pour tous les points du front Pareto,
spcialement pour les points qui nous intressent. En effet, une haute tension va diminuer le courant de la PAC et va
amliorer ses caractristiques. Une tension situe entre x et x V semble donc intressante.
Quant la deuxime courbe, elle a peu prs la mme forme que le front Pareto avec les deux objectifs. Cela est d
la forte dpendance qui existe entre la densit de courant et la consommation de combustible. Dailleurs, le rendement de la
PAC dpend uniquement de cette densit de courant et cest linfluence de la masse du combustible qui fait que lon ne
retrouve pas des valeurs trs proches au maximum de 8000 A/m pour des masses trs faibles. Indpendamment, les
valeurs situes entre 3000 et 4500 A/m seront considres.
Figure 43 : Front Pareto de loptimisation du systme
Figure 44 : Frquence de rpartition de puissances
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 33/38
Figure 45 : Tension et densit de courant de la PAC
Les puissances maximales et minimales sont montres dans la Figure 46. Mme si une puissance maximale plus faible
suppose une diminution de la masse de la PAC et de son convertisseur, il y une tendance vers des hautes valeurs, entre x et
x kW. La puissance a moins dinfluence et tend vers une faible valeur, entre x et x kW.
Figure 46 : Limites de puissance dlivre par la PAC
Pour la stratgie de rglage de la tension du supercondensateur, les deux variables concernes sont montres dans la
Figure 47. A cause de la forte dispersion qui sobserve, cest difficile de choisir un rang de valeurs mais finalement K pourra
rester entre 2.5 et 5 et KVref entre 0.87 et 0.93. Il reste juste remarquer que cette dernire variable se situe loin de ses limites
0.75 et 1 puisque, autrement, la tension du SC pourrait dpasser les limites et atteindre des tats de charge intolrables.
Figure 47 : Constantes pour le rglage de la tension du SC
Figure 48 : Supercondensateurs en srie et en parallle
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 34/38
Finalement, le nombre de supercondensateurs situs en srie et en parallle est montr dans la Figure 48. Le nombre
dlments en parallle est clairement 1 et le nombre dlments en srie varie lgrement entre x et x. La tendance est
aussi claire : atteindre des hautes valeurs de tension, ce qui permet de stocker beaucoup dnergie avec une capacit pas
trs leve, de sorte que lon puisse rduire la consommation et la masse du systme. Ainsi, la tension maximale des SC se
situera entre x et x V et la capacit ncessaire entre x et x F.
4.3. Choix du meilleur rsultat
Aprs une analyse du front Pareto et de la partie de celui-ci qui nous intresse particulirement, il faut choisir un seul
rsultat pour que le modle puisse se mettre en uvre dans la pratique. Une simulation des trois points qui avaient t
slectionns (Figure 60 en vert) sera ralise afin de les comparer. De mme, un autre point, le point 4, sera cr pour cette
comparaison. Pour celui-ci, les conclusions de la section III.4.2.2 seront utilises et les valeurs des variables seront choisies
entre les limites imposes dans la section pour un bon fonctionnement.
Effectivement, il a t vrifi que tous les points, y compris le point 4, respectent les contraintes, et la consommation et
masse obtenues sont faibles par rapport au point original (point 0). Cela peut tre observ dans le Tableau 6, o les masses
de chaque lment (en kg) et la consommation dhydrogne (en moles) sont reprsentes.
Point 0 Point 1 Point 2 Point 3 Point 4
Consommation (%) 100 97.50 95.62 94.84 96.00
Masse PAC (%) 22.64 25.83 27.95 29.08 27.29
Masse CVS1 (%) 20.93 24.55 24.32 24.13 24.14
Masse SC (%) 19.28 9.16 8.58 9.55 9.26
Masse CVS2 (%) 22.01 18.90 19.53 18.55 18.91
Masse H2 (%) 15.14 14.74 14.47 14.36 14.53
Masse totale (%) 100 93.19 94.87 95.68 94.13
Tableau 6 : Objectifs pour 4 points slectionns
En comparant les rsultats avec le point original, une grande diffrence entre la rpartition de masses peut tre
observe. Dailleurs, loptimisation a eu tendance rduire la masse du supercondensateur, mme si une augmentation de
la masse de la PAC et son convertisseur a t ncessaire, afin de rduire la masse totale et la consommation. En ralit, la
PAC va devenir un lment plus important que le supercondensateur en ce qui concerne la distribution de la puissance et la
gestion du systme, parce que cela favorise loptimisation. Ce fait peut sobserver, en plus de dans la rpartition de masses,
dans laugmentation des frquences fournir par la PAC, de la constante de rgulation de la tension du SC et du rang de
puissances fournir par la PAC (saturation de puissance maximale et minimale).
Quant aux 4 point qui ont t gards, tous seraient valables, vu les faibles diffrences qui existent entre eux. Par
consquent, et puisque les deux objectifs considrs ont peu prs la mme importance ou poids, le point avec la somme
dobjectifs plus faible sera choisi, savoir le point 4, qui na pas t gnr par loptimisation mais par le post-processus.
Les rsultats de simulation pour le point 4, similaires ceux des points 1, 2 et 3, sont montrs dans la Figure 49 :
Figure 49 : Mission de secours pour le point optimal
Des commentaires qui nont pas encore t raliss sont remarquer :
Dans le premier graphique, la rpartition existante attribue la PAC une puissance dune frquence suprieure
quavant (en vert).
Dans le deuxime graphique, la tension la sortie de la PAC (en rouge) atteigne les x V mais son minimum ne
dpasse que trs lgrement la tension minimale (en bleu) impose dans le dimensionnement de la PAC. De
mme, la tension lentre du convertisseur (en vert), une fois que les pertes ont t considres, est leve mais
ne dpasse pas les 265 V, une des contraintes de loptimisation.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 35/38
La tension du supercondensateur (troisime graphique) varie assez mais la capacit est quand mme un peu
surdimensionne parce que le minimum reste relativement loin de 50%. La rfrence de 91.25% est suivie trs
rapidement la suite de lleve valeur de la constante de rgulation de cette tension.
La tension de bus (quatrime graphique) est bien rgul, avec une variation de 3.77% par rapport la rfrence de
270 V, toujours en respectant les contraintes.
4.4. Conclusion de loptimisation
Loptimisation a t un instrument trs utile pour amliorer les caractristiques du systme. Lanalyse qui a t ralise
grce un algorithme gntique permet de chercher systmatiquement des solutions amliores et nous a permis de trouver
un dimensionnement avec une rduction de la masse et la consommation en mme temps, en conservant les bonnes
performances. Finalement, la consommation a t rduite de 4.0% et la masse de 5.9% par rapport au dimensionnement
non optimis.
En ralit, dans le cas multicritres, loptimisation trouve de faon totalement objective , lensemble doptima et cest
au concepteur de choisir. Cela nous a bien aids slectionner une tendance ou un rang des valeurs pour les paramtres du
modle qui sera tout fait valable et mieux comprendre le systme et son fonctionnement. Ensuite, la dcision dun seul
point parmi les 4 retenus na pas t dcisive parce que les caractristiques sont trs similaires, mais nanmoins ncessaire
pour lventuelle mise en pratique.
5. CONCLUSION
En plus de la simplicit du systme lie aux variables continues, plusieurs autres avantages sont apparus pour notre
systme hybride PAC - batterie de super condensateurs avec cette stratgie de commande par rapport au systme original
avec la RAT seule :
Il y a une bonne rgulation de la tension de bus avec, par consquent, une bonne qualit du rseau.
La PAC est fiable en termes de disponibilit parce que la puissance et lnergie lectriques quelle dlivre ne
dpendent pas des conditions environnementales. De cette manire, une puissance maximale sera garantie
pendant toute la dure de la mission durgence, ce qui permet de rguler efficacement la tension du SC et de
dlivrer la puissance requise par les charges. De mme, une quantit de combustible correspondant lnergie
ncessaire durant la mission en plus dune marge de scurit devra tre prvue.
La rgulation de la tension du SC fait quune grande partie de lnergie totale du SC soit utilise, ce qui amliore
son dimensionnement et rduit sa masse. De toute faon, une disponibilit nergtique dau moins 25% est assure
(40% pour le systme optimis), ce qui garantit un bon fonctionnement pendant toute la dure de la mission
durgence envisage. Mme si cette disponibilit pourrait paratre faible pour des situations pas prvues, la
rgulation de la tension mise en place par la PAC, qui est mme plus efficace pour des valeurs faibles de tension du
SC, va assurer le bon fonctionnement.
Lhybridation de la source de puissance et le changement de nature de la source principale permettent de rduire la
masse totale. Dune faon trs approxime et pour une dure de fonctionnement de 30 minutes, les masses
peuvent tre estimes comme x kg pour le systme original et x kg pour le systme hybride avec la PAC, cest--
dire, une rduction de x kg ou 44%.
La gnration de lnergie lectrique est ralise dune faon chimique et est plus simple. Dans ce cas nexiste donc
pas la possibilit dun dcrochage et le systme est plus stable.
Quant aux inconvnients, lutilisation dune source moins renouvelable peut tre cite. En effet, lhydrogne doit tre
gnr ailleurs dune manire inconnue, qui sera partiellement non renouvelable et implique une pollution. En plus, le cot de
lhydrogne doit aussi tre considr.
En ce qui concerne la fiabilit, dun cte, elle sera lgrement rduite et le systme deviendra plus dpendant de
llectronique de puissance ; dun autre ct, la suppression de machines tournantes qui travaillaient une puissance plus
leve augmentera la fiabilit.
En rsum, la stratgie de commande respecte le principe dhybridation de base, avec la sparation de puissances
basses et hautes frquences et une trs bonne utilisation de la PAC est retrouve grce cette rgulation. En effet, la PAC
va devenir llment le plus important puisque delle dpend fortement la rgulation de la tension du SC et la disponibilit de
la puissance fournie aux charges. Toutes ces caractristiques nous conduisent considrer ce systme meilleur que le
systme utilis actuellement. Ensuite, dans la conclusion finale, le systme hybride RAT batterie de super condensateurs,
qui est meilleur que le systme original, sera compar avec le systme hybride PAC batterie de supercondensateurs.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 36/38
IV. CONCLUSION GENERALE ET PERSPECTIVES
1. OBJECTIF 1
Un des objectifs sagissait de choisir le systme qui remplace lactuel systme de gnration lectrique durgence, si des
amliorations taient trouves. Tout dabord, la comparaison entre les deux systmes analyss, savoir le systme avec
une hybridation RAT batterie de supercondensateurs (SRAT) et le systme avec une hybridation PAC batterie de
supercondensateur (SPAC) comme source, sera donc ralise. La comparaison avec le systme original ne doit plus tre
effectue car il a t prouv (voir section II.6) que le SRAT est meilleur. Les diffrences les plus importantes entre le SRAT et
le SPAC sont :
La masse pour le SRAT est x kg contre x kg pour le SPAC pour une demi-heure de mission (SPAC 18% de
rduction). Le calcul a t ralis de faon approxime mais lexistence dune diffrence de masse est sre.
Le volume du SPAC est trs lev cause de la faible densit de lhydrogne.
Quant la consommation, on peut dire que la RAT ne consomme rien. Elle profite de la haute vitesse de lavion
pour gnrer, partir du vent, lnergie lectrique directement dans lavion. Cette nergie olienne est propre et
renouvelable. Par contre, la PAC consomme un combustible, lhydrogne dans notre cas. Bien que la gnration
dlectricit, qui se produit aussi directement dans lavion, soit tout fait propre, lhydrogne ne se trouve pas dans
lenvironnement et il faut le gnrer. Cette gnration provient souvent dnergies non renouvelables, ce qui fait
finalement du vent une source plus propre. En plus, lhydrogne aura donc un prix, tout au contraire que lnergie
olienne.
Lhydrogne stock assure la disponibilit de puissance, avec une valeur limite, pendant toute la mission. De mme,
dans le SRAT, une limite de puissance maximale est normalement assure durant cette dure. Pourtant, puisquelle
dpend de conditions environnementales, telles que la densit et la vitesse de lair, cette disponibilit nest pas
tellement fiable.
En ce qui concerne la fiabilit, mme sil y a des diffrences en termes de types dlments ou stratgies, la fiabilit
restera similaire et on ne peut donc pas favoriser un systme par rapport lautre l-dessus. Dabord, la RAT
pourrait tre dcroche, mais cela peut jamais arriver en fonctionnement normale et des prventions (qui ont t
cites dans la section II.6) seront mises en place pour des demandes excessives des charges. En outre, les deux
systmes possdent le mme nombre de convertisseurs et des lments qui pnalisent la fiabilit : les machines
tournantes de la RAT, et les lments auxiliaires de rgulation de la PAC. Finalement, mme si la gestion dnergie
ne suit pas le mme principe, le fonctionnement dans les deux cas est bon et la stabilit est comparable.
La tension de bus varie peu prs jusqu 10 V pour le SPAC et 8 V pour le SRAT par rapport la tension
constante de 270 V. Les deux systmes russissent donc rguler parfaitement la tension de bus, qui respecte
largement les contraintes de tension imposes par Airbus.
En rsum, si lon prend en considration tout cela, la masse, le volume et la consommation sont les variables prendre
en compte pour valuer des diffrences. La faible amlioration de masse du SPAC par rapport au SRAT nest pas suffisante
pour compenser le haut volume que les rservoirs dhydrogne occupent. Si lon ajoute cela le fait que la RAT ne
consomme aucun combustible et quil sagit donc dun systme compltement propre, le SRAT est finalement considrer
dans lavenir pour remplacer lactuel systme durgence. Pourtant, puisque des continuels progrs sur la technologie des
piles combustible sont en train dapparatre, des nouvelles analyses sur le SPAC, qui pourront ventuellement montrer que
ce systme est meilleur que le SRAT, devront tre effectues dans lavenir.
Donc finalement, mme si les rsultats ne sont pas rigoureusement exacts, lobjectif de recherche qui avait t pos a
t atteint. Non seulement le choix de la meilleure option entre le systme original, le SRAT et le SPAC a t ralis, mais
aussi un dimensionnement, une modlisation, une simulation et une analyse des deux systmes hybrides innovants ont t
effectus. En ralit, ce dernier point a t le moyen pour accomplir lobjectif du choix mais il est aussi utile lui-mme parce
quil fait reprsente un petit pas pour limplantation des ces systmes innovants dans lavion.
2. OBJECTIF 2
Le deuxime objectif du stage concerne lentreprise Sogeti High Tech et la monte en comptences en simulation des
systmes. Tout ce qui a t ralis et qui pourra tre utile pour lentreprise dans lavenir sera ensuite numr :
Une recherche, rassemblement et interprtation de donnes provenant des sources diffrentes, comme Internet,
collgues dune autre agence Sogeti (spcialise en mise en uvre dessais de systmes lectriques), livres et
cours a t ralis. Elles ont t utilises pour dimensionner ou se faire une ide des paramtres du systme.
Plusieurs modlisations ont t effectues : dlments simples de conversion dnergie comme la turbine olienne,
le gnrateur lectrique, la pile combustible, le vrin hydraulique ou la pompe hydraulique ; dlments simples de
transformation dnergie comme le transformateur, les convertisseurs (hacheur, onduleur, redresseur) et la bote de
vitesse ; dlments de stockage dnergie comme les supercondensateurs ou encore la pile combustible ;
dlments plus complexes et multi-physiques comme spcialement lactionneur lectro-hydraulique ; et de
systmes complexes, qui sont aussi multi-physiques mme si toute la gestion est lectrique, savoir le systme
avec la PAC et le systme avec la RAT.
Le dimensionnement dlments trs divers a t ralis dune faon assez dtaill pour le SRAT. Dans le cas du
SPAC, le dimensionnement a eu lieu dune manire moins approfondie puisque une optimisation devait seffectuer
ensuite. En effet, loptimisation a t fructueuse et une amlioration du dimensionnement a t atteinte, en plus de
servir comprendre mieux le fonctionnement du systme.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 37/38
Plusieurs types de rgulation ont t raliss : du courant du stator dune machine synchrone excitation spare,
du courant dune pile combustible, de la tension du rseau continu, de la tension dune batterie de
supercondensateurs et de la vitesse une machine synchrone aimants permanents comme moyen pour contrler la
position de la gouverne. Pour cela, des divers rgulateurs et stratgies ont t mises en place : rgulateur PI,
rgulateur IP, PI+filtre, avec/sans anti-windup, compensation de ples et des rgulations en cascade.
Deux stratgies de gestion de lnergie ont t effectues afin de rpartir la puissance dlivrer par la source
dnergie et par la source de puissance, en garantissant des bonnes performances. Les deux ont beaucoup des
points en commun parce que dans les deux, la source de puissance contrle la tension de bus en devenant une
source de tension (avec le condensateur de bus) et la source dnergie agit comme une source de tension et
garantit un correct tat de charge du supercondensateur. La diffrence rside dans la faon dassurer cette charge,
ce qui va changer considrablement les caractristiques de fonctionnement.
Le logiciel AMESim a t utilis pour raliser les simulations. Le mode de fonctionnement de ce software, avec une
grande importance mise sur la causalit, a t test et compris. Il a t possible de comparer les modles moyen et
instantan des convertisseurs avec le choix final du modle moyen grce la haute rduction du temps de calcule
sans une grande perte dexactitude par rapport notre but. Plusieurs lments plus labors que les existants ou
qui nexistait pas encore ont t gnrs, comme par exemple un transformateur toile-triangle, un onduleur de
tension ou un rgulateur PI avec anti-windup. Finalement, le module doptimisation dAMESim a t test, avec des
bons rsultats pour une optimisation pour un critre mais sans convergence pour les optimisations multicritre.
De mme, le logiciel Optimus a t employ, avec des bons rsultats pour un modle complexe avec neuf variables
et deux objectifs, mme si le temps de calcul a t lev. Pour cela, une interphase Optimus-AMESim de sorte
quOptimus lance la simulation sur AMESim chaque exprience doptimisation a t ralise.
Dans ce cas aussi, les rsultats ne sont pas tout fait exacts mais sont trs raisonnables et donnent une ide du
fonctionnement des deux systmes et des lments isols. En outre, lobjectif de lentreprise daugmenter en comptences a
t accompli dune manire satisfaisante avec toutes les dmarches qui ont t mentionnes dans ce paragraphe.
Labsence de rsultats trs prcis peut tre amliore avec laccs plus de donnes et avec les actions raliser dans
lavenir qui sont ensuite cits.
3. PERSPECTIVES
De nombreux tudes pourraient tre effectus afin damliorer ou continuer le travail expos dans ce texte :
Simulation plus en dtail des systmes : Modle instantan des convertisseurs lectroniques, utilisation de plus
dlments parasites, estimation plus prcise des pertes de chaque lment. Cela pourrait tre intressant pour
vrifier le fonctionnement correct du systme avant de mettre en place la ralisation pratique.
Afin damliorer encore les objectifs et les performances, dautres stratgies de gestion nergtique, dautres
architectures, une optimisation du SRAT ou une optimisation du SPAC avec des variables ajoutes (par exemple la
frquence de commutation) pourraient tre envisages.
Lvaluation de linteraction du rseau de secours avec le reste de systmes avioniques serait intressante pour
valider le correct fonctionnement.
Ltude du cot et du volume des systmes aidera aussi raliser la comparaison entre systmes.
En rsum, toutes ces actions permettront srement damliorer les caractristiques des systmes, de vrifier leur bon
fonctionnement et de les comparer plus prcisment. Ensuite, des tests pratiques pourraient bien entendu tre effectus.
Finalement, il faut se rappeler que les systmes employs dans les avions doivent tre srs et fiables. Il y a souvent des
rticences modifier une solution existante qui a prouv ses capacits accomplir cela, surtout en ce qui concerne les
systmes de secours. Cest pourquoi plusieurs analyses sont ncessaires, ainsi que des tests pratiques trs prcis afin
dinnover dans le domaine du rseau de lavion.
Etude thorique dun nouveau rseau de secours pour laronautique Confidentiel
Andoni Urtasun Page 38/38
REFERENCES BIBLIOGRAPHIQUES
[Ref1] Olivier LANGLOIS, thse de doctorat : Conception dun rseau de secours lectrique pour laronautique ;
Juin 2006
[Ref2] Marcos GARCA ARREGUI, thse de doctorat : Theoretical study of a power generation unit based on the
hybridization of a fuel cell stack and ultracapacitors ; Dcembre 2007
[Ref3] R. SAISSET, C. TURPIN, S. ASTIER, sminaire nergie dcentralise du GDR ME2MS : Gestion dnergie
dans un systme lectrique avec stockage
[Ref4] Xavier ROBOAM, Bruno SARENI, Guillaume FONTES, conception systme : Modlisation, analyse, et
gestion nergtique dun actionneur EHA hybridation par stockage et Alimentation par PAC
[Ref5] Guillaume FONTES, conception systme : Modlisation Bond-Graph de composants lectrochimiques
[Ref6] Anonyme, www.alphea.com/upload/e8405_piles_combustible.pdf : Piles combustible
[Ref7] Jason KEITH, cours de Kinetics and Reaction Engineering : Tafel Equation and Fuel Cell Kinetic Losses
[Ref8] Image PAC, http://www.guideinformatique.com/IMAGES/Pile01.jpg
ETUDE THEORIQUE DUN
NOUVEAU RESEAU DE SECOURS
STAGE DE FIN DETUDES
1
NOUVEAU RESEAU DE SECOURS
POUR LAERONAUTIQUE
ANDONI URTASUN
DEPARTEMENT GENIE
ELECTRIQUE ET AUTOMATIQUE
I. CONSIDERATIONS GENERALES
SOMMAIRE
2
II. RAM AIR TURBINE (RAT)
III. PILE A COMBUSTIBLE (PAC)
IV. CONCLUSION
CONSIDERATIONS
GENERALES
3
GENERALES
MISE EN CONTEXTE
Gnration en dernier secours
Avion utilis
Logiciels :
4
Logiciels :
-AMESim : Simulation systme
-Optimus : Optimisation
Implmentation de mthodes
-Modlisation et simulation de systmes
-Optimisation de systmes
Conclusions par rapport aux hypothses
SOURCES
ENVISAGEABLES
PUISSANCE DEMANDEE
MISSION DE
SECOURS
5
RAT
PAC
RAT/PAC :
Puissance
moyenne
Rseau continu
V
BUS
= 270 V
Batterie de super
Source
dnergie
CVS1
Charges
essentielles
ARCHITECTURE
6
Batterie de super
condensateurs (SC) :
Pics de puissance
Charges trs
variables
CVS2
Source de
puissance
Electronique
de puissance
Avantages du rseau continu :
Qualit et simplicit
Adaptation du SC
Adaptation de la PAC
Libert de gnration (RAT)
Rversibilit des charges
Rduction
de masse
RAM AIR TURBINE (RAT)
7
RAM AIR TURBINE (RAT)
I. PRESENTATION DU SYSTEME
II. MODELISATION
III. GESTION DE LENERGIE
IV. MISSION DURGENCE
V. CONCLUSION
PRESENTATION DU SYSTEME RAT
8
Causalit : 3 sources de courant relies par un condensateur (source de tension)
2 degrs de libert : Courant dexcitation du gnrateur et rapport cyclique hacheur
Contraintes : Fournir la puissance demande par les charges avec une tension de
bus quasiment constante et une tension du SC stable
MODELISATION : SOURCE DENERGIE
Gnrateur
lectrique,
1ddl : courant
dexcitation
9
dexcitation
Transformateur redresseur :
Rduction doscillations et augmentation de frquence
Source de courant
Turbine olienne
MODELISATION : SOURCE DE PUISSANCE
L=180H R
HACHEUR
10
Supercondensateur:
7 F, 250 V, 190 A
R
SC
= 0.16
Hacheur rversible :
1ddl, rapport
cyclique (alpha)
Source de courant
MODELISATION : CHARGES ESSENTIELLES
11
Modle moyen onduleur :
2ddl, rapports cycliques
EHA rversible + Charges constantes
MODELISATION : CHARGES ESSENTIELLES
12
Rgulation des courants stator avec
anti-windup (saturation des tensions)
Rgulation de vitesse de la machine synchrone
avec anti-windup (saturation de couple)
Transitoire plus lent ( cause de la saturation)
Rgulation de la position de la gouverne pour la mission de secours
GESTION DE LENERGIE
13
GESTION DE LENERGIE : REGULATION DE LA TENSION BUS
Bonne rgulation face chelons
de courant de charge
Modle moyen valid
GESTION DE LENERGIE : GESTION MPPT
I
RAT
Fournir les charges et le SC
Maximum Power Point Tracking (MPPT)
Sans dpasse P
OPT
: calcul de P
OPT
14
Hystrsis V
SC
: 216 V 237 V (charge and dcharge)
Comparaison de P
opt
and P
load
Charge du SC : P
REF
= P
OPT
(MPPT on)
Dcharge du SC : Si P
CH
< P
OPT
, alors P
REF
= P
CH
(MPPT off)
Si P
CH
> P
OPT
, alors P
REF
= P
OPT
(MPPT on)
MISSION DURGENCE
Simulation des 140 s les plus critiques
Atterrissage : Puissance demande plus leve
Basse vitesse : Faible puissance disponible
Environ 30 minutes
15
Avantages
Bonne rgulation V
BUS
(2.6%)
Disponibilit E
SC
(75%)
Variables continues
CONCLUSION
Stabilit
Simplicit
16
Dsavantages
Perspectives
Hybridation+MPPT
2 CVS
Optimisation
de la masse
Frquence de gnration
Phases de gnration
Rduction de masse (30%)
Fiabilit
PILE A COMBUSTIBLE (PAC)
17
PILE A COMBUSTIBLE (PAC)
I. PRESENTATION DU SYSTEME
II. MODELISATION
III. GESTION DE LENERGIE
IV. MISSION DURGENCE (I)
V. OPTIMISATION
VI. MISSION DURGENCE (II)
VII. CONCLUSION
PRESENTATION DU SYSTEME PAC
18
Causalit : 3 sources de courant relies par un condensateur (source de tension)
2 degrs de libert : Rapports cycliques des hacheur
Contraintes : Fournir la puissance demande par les charges avec une tension de
bus quasiment constante et une tension du SC stable
MODELISATION : ELEMENTS COMMUNS
Charges lectriques
Source de puissance
Condensateur de bus
Mme modle
Mme dimensionnement
MODELISATION : SOURCE DENERGIE
Predimensionnement : Optimisation de la masse et la consommation de H
2
19
Predimensionnement : Optimisation de la masse et la consommation de H
2
Point de fonctionnement
puissance maximale :
Saturation de puissance
P (kW) V (V) I (A) (%)
P
MAX
30 223.4 134.3 45.70
P
MIN
25 234.7 106.5 48.06
N = 330 cellules, S = 310 cm
Fonctionnement :
MODELISATION : SOURCE DENERGIE
Modle linaire PAC pour
le rang de fonctionnement :
Erreur 0.05%
Transitoire non valide
20
Hacheur non
rversible : 1ddl,
rapport cyclique
Source de courant :
Rgulation courant bobine
GESTION DE LENERGIE
Basse frquence
Haute frquence
F
SEP
= 50 mHz
21
Haute frquence
Gnration de la
rfrence de courant
fourni par la PAC
MISSION DURGENCE (I)
Simulation des 140 s les plus critiques
Atterrissage : Puissance demande plus leve
La disponibilit de puissance PAC est constante
Environ 30 minutes
22
Bon fonctionnement
Surdimensionnement (C
SC
)
Optimisation
OPTIMISATION : LE PROBLEME
9 variables
23
2 objectifs : masse et consommation
6 variables sous contraintes
Point du predimensionnement (0)
M=95.84 kg, N
H2
=359.9 moles
Normalisation des objectifs
Point initial optimisation
OPTIMISATION : LES RESULTATS
24
Tendance vers :
V
PAC
lev
PAC matre :
F lev
Rang de fonctionnement lev
K lev
V
SC
lev et C
SC
faible
Point 4
Choix du point 4
MISSION DURGENCE (II)
Systme optimis
Rduction de la masse 5.9%
Rduction de la consommation 4.0%
Respect des contraintes
25
Avantages
Bonne rgulation V
BUS
(3.8%)
Disponibilit E
SC
(40%) et rgulation
Variables continues
CONCLUSION
Stabilit
Simplicit
26
Avantages
Dsavantages
PAC+Hybridation
Hydrogne : Cot
Rduction de masse (44%)
Hydrogne : Disponibilit PAC constante
Gnration lectrique simple
CONCLUSION GENERALE
27
CONCLUSION GENERALE
I. OBJECTIF 1
II. OBJECTIF 2
III. PERSPECTIVES
OBJECTIF 1
Alternative lactuel systme de secours :
Comparaison PAC+SC (SPAC) RAT+SC (SRAT)
28
Variables de dcision : masse, volume, consommation
Alternative : Hybridation RAT+SC
OBJECTIF 2
Monte en comptences de Sogeti High Tech
en simulation de systmes
Recherche, rassemblement et interprtation de donnes
Modlisation
Dlments simples : Turbine olienne, gnrateur lectrique, PAC, convertisseurs
Dlments complexes : Actionneur lectro-hydraulique (EHA)
29
Dlments complexes : Actionneur lectro-hydraulique (EHA)
De systmes complexes : Systme RAT/PAC+SC+charges
Dimensionnement des lments analytiquement et par optimisation
Commande de systmes
Rgulations : vitesse dune MSAP, courant dune PAC, tension du rseau
Rgulateurs : PI, IP, filtre, avec/sans anti-windup, compensation des ples
Mise en place de stratgies de gestion de lnergie
Gestion MPPT/puissance requise
Gestion sans MPPT
Test du logiciel de simulation AMESim
Cration de super composants
Test du module doptimisation
Elaboration dune interface Optimus AMESim pour loptimisation des systmes
PERSPECTIVES
Simulation plus en dtail : modle instantan des convertisseurs,
lments parasites, estimation prcise des pertes
Mise en place dautres stratgies de commande, dautres architectures
THEORIQUE
30
Optimisation du SRAT et du SPAC avec variables ajoutes
Interaction du rseau de secours avec le reste des systmes de lavion
Etude de volume et de cot
TEST PRATIQUES TRES PRECIS
Implantation dans lavion
MERCI POUR VOTRE
ATTENTION
STAGE DE FIN DETUDES
31
ATTENTION
ANDONI URTASUN
You might also like
- EtatArt Aerogenerateurs 01Document53 pagesEtatArt Aerogenerateurs 01Abdallah BelabbesNo ratings yet
- Porte AutomatiqueDocument18 pagesPorte AutomatiqueKatana Jijtsu100% (1)
- Multon DEA ConceptionActionneurs 1Document26 pagesMulton DEA ConceptionActionneurs 1Christophe ViguierNo ratings yet
- TE53 2014A Cours JLS Turboalternateurs ComplementsDocument20 pagesTE53 2014A Cours JLS Turboalternateurs ComplementskanbouchNo ratings yet
- Hybrid System With Energy Storage (HOMER) : "PV /wind/ Fuel Cell: Electolyser With Hydrogen Tank "Nice, FranceDocument13 pagesHybrid System With Energy Storage (HOMER) : "PV /wind/ Fuel Cell: Electolyser With Hydrogen Tank "Nice, Francehouda amzineNo ratings yet
- Option Temps ReelDocument80 pagesOption Temps Reelpriankasy679No ratings yet
- Energie EolienneDocument60 pagesEnergie EolienneAyoub HaijNo ratings yet
- EolienneDocument17 pagesEolienneYassine LakhalNo ratings yet
- 1.THESE Hocini Yacine PDFDocument146 pages1.THESE Hocini Yacine PDFAIGOUN lydiaNo ratings yet
- 2 Isge - Guide Du Stagiaire - DTS - DIT - 2022Document12 pages2 Isge - Guide Du Stagiaire - DTS - DIT - 2022Sandra TraoréNo ratings yet
- Rapport Suiveur PDFDocument16 pagesRapport Suiveur PDFFares Shotokan100% (1)
- Rapport Pfe Ima ConvertiDocument127 pagesRapport Pfe Ima ConvertiChaouch MarwenNo ratings yet
- Chapitre 4 - Gestion D'énergie & SmartGridDocument8 pagesChapitre 4 - Gestion D'énergie & SmartGridZineb LamraniNo ratings yet
- 104 Smart GridDocument35 pages104 Smart GridMohamedAliOuhaddouNo ratings yet
- Wang - Ye - DLE EolieneDocument189 pagesWang - Ye - DLE EolieneSoufiane ElganiNo ratings yet
- Etude Generateur Asynchrone Pour EolienneDocument93 pagesEtude Generateur Asynchrone Pour EolienneKarima MayziNo ratings yet
- Devoir EPDocument1 pageDevoir EPAhmad WhabiNo ratings yet
- Krim Med Lamine Debbah Houssem EddineDocument143 pagesKrim Med Lamine Debbah Houssem EddineSoumana issoufiNo ratings yet
- Philippe Dessante HDRDocument136 pagesPhilippe Dessante HDRissamouNo ratings yet
- CHAPITREIIDocument6 pagesCHAPITREIIAbdelmoghit IdhsaineNo ratings yet
- Commande D'une Eolienne Basée Sur Les Modèles Flous de Takagi-SugenoDocument95 pagesCommande D'une Eolienne Basée Sur Les Modèles Flous de Takagi-SugenomezianeNo ratings yet
- Rapport AssouliDocument26 pagesRapport AssouliYassine Rajawi PurNo ratings yet
- Dimensionnement D'une Pompe PVDocument16 pagesDimensionnement D'une Pompe PVBoulbeba JribiNo ratings yet
- Étude Des Harmoniques Et Techniques Réparé2018Document123 pagesÉtude Des Harmoniques Et Techniques Réparé2018Sarra BÉCHIRINo ratings yet
- Rapport de StageDocument75 pagesRapport de StageLIBRAIRIE AL IRFANENo ratings yet
- étude HydroDocument80 pagesétude HydroPatrick LaffontNo ratings yet
- ThA Se de Doctorat de AGBLI KrA Hi SergeDocument218 pagesThA Se de Doctorat de AGBLI KrA Hi SergeAhamadi ElhouyounNo ratings yet
- Abdallah Mahamat Tanko - Ge2015Document53 pagesAbdallah Mahamat Tanko - Ge2015Oumar MandodjoNo ratings yet
- Robot Nettoyeur Panneaux Solaires - PHR PDFDocument1 pageRobot Nettoyeur Panneaux Solaires - PHR PDFoussema jendoubi100% (1)
- Cours Etat de Lart GEDocument56 pagesCours Etat de Lart GESalah OumahammedNo ratings yet
- Calsol ConvertiDocument11 pagesCalsol ConvertiClayssaNelNo ratings yet
- Commandes Hybrides de La Machine Asynchr PDFDocument175 pagesCommandes Hybrides de La Machine Asynchr PDFELmokhtar HamrouniNo ratings yet
- Génie Électrique DunodDocument19 pagesGénie Électrique DunodDominique Komey50% (2)
- Arabi - Compte Rendu (Modelisation de La MAS)Document8 pagesArabi - Compte Rendu (Modelisation de La MAS)Latifa ZizouNo ratings yet
- Projet Fin D'annee2Document35 pagesProjet Fin D'annee2Mhiri IskanderNo ratings yet
- Electronique de Puissance Elec032Document49 pagesElectronique de Puissance Elec032Sidahmed LarbaouiNo ratings yet
- Total SOLAIRE PDFDocument20 pagesTotal SOLAIRE PDFMohamed ZakhamaNo ratings yet
- Mémoire YAYA NADJO Isdeen - CompressedDocument166 pagesMémoire YAYA NADJO Isdeen - CompressedAllamine Oum's100% (1)
- Alternateur Synchrone Monophasé Basse VitesseDocument196 pagesAlternateur Synchrone Monophasé Basse Vitessechairi mohamed100% (1)
- Thése PDFDocument85 pagesThése PDFAbdou Migualo100% (1)
- Conception Et Réalisation D'un Système D'irrigation Inteligent Version CorrigéeDocument61 pagesConception Et Réalisation D'un Système D'irrigation Inteligent Version CorrigéeAnselme AdoukonouNo ratings yet
- Modc3a9lisation Et Amc3a9lioration de Performance D - Une Poste de RegroupementDocument57 pagesModc3a9lisation Et Amc3a9lioration de Performance D - Une Poste de RegroupementJawher SalemNo ratings yet
- Centrale NucléaireDocument31 pagesCentrale NucléairezakaniNo ratings yet
- Republique Democratique Du CongoDocument88 pagesRepublique Democratique Du CongoEgide Ilunga MpianaNo ratings yet
- Réforme Des Programmes D'ingénieur en Informatique V1Document88 pagesRéforme Des Programmes D'ingénieur en Informatique V1MOHAMED NAOUAINo ratings yet
- Commande Numerique Vectorielle Des Actionneurs Asynchrones TriphasesDocument54 pagesCommande Numerique Vectorielle Des Actionneurs Asynchrones TriphasesFethi Farhani100% (4)
- Catia v5 r19 x64 Avec Sp2Document13 pagesCatia v5 r19 x64 Avec Sp2Fernando CostNo ratings yet
- Cahier Des Charges NRCDocument20 pagesCahier Des Charges NRCCaptain Teddy BearNo ratings yet
- MEMOIRE Énergie RenoDocument68 pagesMEMOIRE Énergie RenoFerdaous AbdelmalekNo ratings yet
- Mémoire Master EAA Fini Chiab PDFDocument74 pagesMémoire Master EAA Fini Chiab PDFchiabNo ratings yet
- L'énergie ÉolienneDocument21 pagesL'énergie ÉolienneNadhir Brahem100% (1)
- Correction TD Equpement 2021Document9 pagesCorrection TD Equpement 2021Dja LilNo ratings yet
- Inj Mazouz FaridaDocument133 pagesInj Mazouz Faridahassenbb100% (1)
- Republique Algerienne Democratique Et Po-45383738 PDFDocument92 pagesRepublique Algerienne Democratique Et Po-45383738 PDFMohamed GueroNo ratings yet
- ExposéDocument23 pagesExposéZinai Abdelatif100% (2)
- Pfe FinalDocument83 pagesPfe FinalghassenNo ratings yet
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceFrom EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceNo ratings yet
- Rapport 4GDocument25 pagesRapport 4GHoucem Bn SalemNo ratings yet
- Programmation Machines Outils Commande NumeriqueDocument33 pagesProgrammation Machines Outils Commande NumeriqueBen FahNo ratings yet
- CatalogDocument1 pageCatalogBen FahNo ratings yet
- Nomen PhaseDocument2 pagesNomen PhaseBen FahNo ratings yet
- GP Génie Des Procédés Des MateriauxDocument54 pagesGP Génie Des Procédés Des MateriauxBen Fah0% (1)
- Cours Mécanique Du Solide PDFDocument78 pagesCours Mécanique Du Solide PDFAnonymous GuTrdmh07100% (6)
- Analyser Temporelle Des PhasesDocument3 pagesAnalyser Temporelle Des PhasesBen FahNo ratings yet
- TD2 RoulementsDocument1 pageTD2 RoulementsBen FahNo ratings yet
- TD6 RoulementsDocument2 pagesTD6 RoulementsBen Fah100% (1)
- Initiation À La Fonderie 1ère AnnéeDocument23 pagesInitiation À La Fonderie 1ère Annéeyouness100% (1)
- 2100544632 (1)Document292 pages2100544632 (1)Saad Al HelyNo ratings yet
- FONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFDocument18 pagesFONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFBen Fah100% (3)
- Sciences Industrielles Pour L'ingennieur, Tout-En-UnDocument272 pagesSciences Industrielles Pour L'ingennieur, Tout-En-UnAyoub Marraha50% (2)
- Actions MécaniquesDocument19 pagesActions MécaniquesBen Fah100% (1)
- Intro Chain e Numer I QueDocument57 pagesIntro Chain e Numer I QueBen FahNo ratings yet
- TD Clavettes Et Les Paliers LissesDocument2 pagesTD Clavettes Et Les Paliers LissesBen FahNo ratings yet
- MECPT - 07 Anneau Sur Cercle en RotationDocument8 pagesMECPT - 07 Anneau Sur Cercle en RotationBen FahNo ratings yet
- TD Méca ForceCentraleDocument2 pagesTD Méca ForceCentraleBen FahNo ratings yet
- EvolutionDocument41 pagesEvolutionBen FahNo ratings yet
- TCP 03 Perspectives PDFDocument22 pagesTCP 03 Perspectives PDFBen Fah100% (1)
- Lave Linge SystemeDocument9 pagesLave Linge SystemeBen Fah100% (2)
- ( (Huflfh: /hvfdofxodwulfhvvrqwlqwhuglwhvDocument4 pages( (Huflfh: /hvfdofxodwulfhvvrqwlqwhuglwhvBen FahNo ratings yet
- TD 1Document1 pageTD 1Ben FahNo ratings yet
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesBen FahNo ratings yet
- TP-Pièces en BoisDocument6 pagesTP-Pièces en BoisBen FahNo ratings yet
- PerspectiveDocument17 pagesPerspectiveBen FahNo ratings yet
- Plan D'action 2017Document96 pagesPlan D'action 2017Ben FahNo ratings yet
- TCP Controle N2 2015 2016 ProjectionDocument4 pagesTCP Controle N2 2015 2016 ProjectionBen FahNo ratings yet
- SADT Cours Etude Des Systemes 062016Document17 pagesSADT Cours Etude Des Systemes 062016Ben FahNo ratings yet
- F0rmes UsuellesDocument3 pagesF0rmes UsuellesBen FahNo ratings yet
- Guide-Invest Oleicole PDFDocument18 pagesGuide-Invest Oleicole PDFBen FahNo ratings yet
- TD Machine SynchroneDocument4 pagesTD Machine SynchroneKhalil Lasfer75% (4)
- Machine Synchrone PDFDocument4 pagesMachine Synchrone PDFMouad BenmoussaNo ratings yet
- Mémoire HDR ADe-Bernardinis VF PDFDocument226 pagesMémoire HDR ADe-Bernardinis VF PDFje m'appelle raidNo ratings yet
- Mecanique Voiture Partie 1Document80 pagesMecanique Voiture Partie 1أحمد العابدNo ratings yet
- 4.alternateur 2Document52 pages4.alternateur 2dfgmy100% (1)
- Chapitre 8 Machine Asynchrone TriphaseeDocument15 pagesChapitre 8 Machine Asynchrone TriphaseeWided MaghraouiNo ratings yet
- Lecture 4-1 Composantes Symetriques FDocument18 pagesLecture 4-1 Composantes Symetriques FPatriot MuyengwaNo ratings yet
- CHAPITRE 9 Moteurs MonophaséDocument10 pagesCHAPITRE 9 Moteurs MonophaséHakim Dokmane0% (1)
- Production ElectriciteDocument22 pagesProduction Electriciteملاك روحيNo ratings yet
- Le Circuit de Charge MotoDocument13 pagesLe Circuit de Charge MotoAli AhmiaNo ratings yet
- D3775Document29 pagesD3775محمدلمينابراهيمالموريتانيNo ratings yet
- Commande Numérique Des Machines SynchronesDocument22 pagesCommande Numérique Des Machines SynchronesLyes100% (1)
- Cours - Boudries - Commande Des Machines ElectriquesDocument92 pagesCours - Boudries - Commande Des Machines ElectriquesAbdelghafour SaidiNo ratings yet
- IGEE-403 Chap4 2 3 EDavidDocument37 pagesIGEE-403 Chap4 2 3 EDavidferiel aissiNo ratings yet
- CH2 B PDFDocument10 pagesCH2 B PDFamine milanoNo ratings yet
- Alternateur CircuitChargeDocument15 pagesAlternateur CircuitChargenses7200No ratings yet
- Schneider Code AnsiDocument1 pageSchneider Code AnsiSamuel De Neef100% (2)
- Guide Petite HydroDocument159 pagesGuide Petite HydroYves Benoit0% (1)
- TP2 Machine Sychrone Couple Au Reseau InfinieDocument8 pagesTP2 Machine Sychrone Couple Au Reseau Infinieharzallah khaled50% (2)
- Commande Non Linéaire Par Des Régulateurs enDocument147 pagesCommande Non Linéaire Par Des Régulateurs enHamza Benine0% (1)
- TD1 Electrotechnique Moteur À Courant ContinuDocument2 pagesTD1 Electrotechnique Moteur À Courant ContinuAyoub El Badri100% (1)
- Cours AlternateurDocument7 pagesCours Alternateuranyos_05100% (2)
- Cours Comsys ElecDocument240 pagesCours Comsys ElecbabersonNo ratings yet
- Machine AsynchroneDocument20 pagesMachine AsynchronehafidNo ratings yet
- Alternateur Synchrone Monophasé Basse VitesseDocument196 pagesAlternateur Synchrone Monophasé Basse Vitessechairi mohamed100% (1)
- These Frederic POITIERSDocument166 pagesThese Frederic POITIERSpiteteNo ratings yet
- Contribution A Letude Des Machines Elect PDFDocument160 pagesContribution A Letude Des Machines Elect PDFdjahid izemNo ratings yet
- CT 4 Codes AnsiaDocument11 pagesCT 4 Codes AnsiaTaoufik SadeqNo ratings yet
- Cours FormationDocument68 pagesCours FormationMed ChetNo ratings yet