Professional Documents
Culture Documents
Memoire de Magister
Uploaded by
Koukou AmkoukouCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Memoire de Magister
Uploaded by
Koukou AmkoukouCopyright:
Available Formats
Ministre de lenseignement suprieur et de la recherche scientifique
Facult des sciences de lingnieur
Dpartement dlectromcanique
MEMOIRE
Prsent en vue de lobtention du diplme de Magister
Thme
Option
ELECTROMECANIQUE
Prsent par
Annane Adel
Directeur du mmoire : Mr S. Bouras M.C. Universit dAnnaba
Devant le jury
Prsident : Mr A. Haddouche Prof Universit de Annaba
Rapporteur : Mr S. Bouras M.C Universit de Annaba
Examinateurs : Mr S. Sad Prof Universit de Annaba
Mr L. Herous M.C Universit de Annaba
Mr N. Ghorab M.C Universit de Annaba
2009/2010
BADJI MOKHTAR ANNABA UNIVERSITY
UNIVERSITE BADJI MOKHTAR- ANNABA
Anal yse du comportement du moteur
synchrone dans les entranements
lectriques vitesse variable
Remerciements
Quil me soit dabord permis de remercier et dexprimer ma gratitude envers le bon Dieu, qui
ma donn la patience et le courage pour que je puisse continuer ce travail.
Je tiens exprimer toute ma gratitude Monsieur Bouras Slimane, Matre de confrence au
sein du dpartement dlectromcanique luniversit de Annaba, qui a assur la direction de
ce travail. Au cours de ces deux annes, jai profit dun encadrement scientifique de qualit.
Je le remercie pour ses conseils pertinents et clairs, son aide tait pour moi dune
importance capital dans la ralisation de ce travail. Quil trouve ici lexpression de ma
profonde reconnaissance.
Jadresse mes sincres remerciements Monsieur Haddouche Ali Professeur au sein du
dpartement dlectromcanique luniversit de Annaba, pour mavoir honor avec sa
prsence en acceptant de prsider le jury de soutenance de ce mmoire.
Mes vifs remerciements vont galement aux membres de jury de soutenance compos de
Messieurs : Herous Lazher, Matre de Confrence au sein du dpartement dlectromcanique
luniversit de Annaba, Sad Salah Professeur au sein du dpartement dlectromcanique
luniversit de Annaba, Ghorab Noureddine Matre de Confrence au sein du dpartement
dlectrotechnique luniversit de Annaba. Je les remercie chaleureusement pour leur
prsence et pour avoir accept dexaminer le prsent mmoire.
Je remercie aussi tous les enseignants et les responsables du Dpartement dElectromcanique
de lUniversit de Annaba pour leur aide et leur encouragement.
Sans oublier mes collgues dans le domaine de la recherche et durant les annes dtude, je
tiens les remercier vivement.
Enfin, Je voudrais associer mes remerciements toutes les personnes qui ont contribu de
prs ou de loin laboutissement de ce travail.
Rsum
Ce mmoire porte sur ltude du comportement de la machine synchrone aimants
permanents vitesse variable, alimente par un onduleur triphas deux niveaux.
Pour ce faire, on a adopt les tapes suivantes :
Ltude de lart de la machine synchrone aimants permanents.
Modlisation de la machine synchrone aimants permanents et de son alimentation.
Prsentation de la technique de commande vectorielle applique la (MSAP).
Une stratgie de commande directe du flux statorique et du couple lectromagntique
(DTFC) applique au (MSAP).
Prsentation des algorithmes gntiques et leur utilisation comme outil doptimisation des
paramtres des deux rgulateurs de vitesse de la (MSAP).
Plusieurs rgimes transitoires ont t traits par simulation (dmarrage vide, introduction
dun couple de charge, inversion et changement de consigne de la vitesse). De plus, des tests
de robustesse concernant la variation paramtrique de la (MSAP) ont t aussi effectus.
Daprs les rsultats de simulations, la technique de commande tudie permet dobtenir de
bonnes performances dynamiques et statiques et prsente une robustesse vis--vis de la
perturbation extrieure et de la variation paramtrique.
Abstract
In this work, a study of a permanent magnet synchronous machine, controlled by two-level
voltage inverter.
For this fact, one has adopted the following stages:
The study of the art of the synchronous permanent magnet machine
Modelling of the synchronous permanent magnet machine and its supply system
Presentation of the field oriented control, applied to the (PMSM)
A direct stator flux and torque control(DTFC) strategy applied to the (PMSM)
Presentation of the genetic algorithms as a tool of optimization of the two speed regulators
of the (PMSM)
Several transient cases have been treated (no-load starting operation, step loading, inversion
of speed and change of its command value). Besides, robustness tests concerning the
parametric variation of the (PMSM) have been presented. According to the simulation results,
the strategy used to control the system has shown good static and dynamic performances and
presented robustness against the loading operation outside disruption and the parametric
variations.
.
:
.
.
.
.
.
)
(
.
SOMMAIRE
Nomenclature
Liste des figures
Liste des tableaux
Introduction gnrale .. 1
Chapitre I
Ltat de lart des machines synchrones aimants permanents
I.1. Introduction 3
I.2 Machines Synchrones rotors bobins... 3
I.3 Machines Synchrones rotors bobins ples lisses. 3
I.4 Machines Synchrones rotors bobins ples saillants 4
I.5 Gnralits sur les machines lectriques aimants permanents. 4
I.5.1 Les machines courant continu et aimants permanents (MCC). 6
I.5.2 Les machines aimants permanents sans balais. 6
I.5.3 Les machines synchrones aimants permanents (MSAP).. 6
I.5.4 Les rotors de la machine aimants permanents.. 7
I.5.4.1 Aimants en surface.. 7
I.5.4.2 Aimants insrs 8
I.5.4.3 Aimants enterrs.. 8
I.5.4.4 Aimants concentration de flux. 8
I.5.5 Les matriaux magntiques. 9
I.5.5.1 Les aimants. 9
I.5.5.1.1 Aimants permanents fritts.. 9
I.5.5.1.2 Aimants lis. 12
I.5.5.2 Des matriaux magntiques doux 12
I.5.5.2.1 Matriaux lamins 12
I.5.5.2.2 Matriaux composites.. 12
I.6 Conclusion 13
Chapitre II
Modlisation de la machine synchrone aimants permanents
II.1 Introduction. 14
II.2 Les quations lectriques des machines synchrones aimants permanents 14
II.3 Equations magntiques 15
II.4 Equation mcanique 16
II.5 Transformation triphas- diphas 17
II.5.1 Principe de la transformation de park. 17
II.5.2 Transformation de Concordia.. 18
II.5.3 Choix du Rfrentiel 19
II.5.3.a Rfrentiel li au stator 19
II.5.3.b Rfrentiel li au rotor 19
II.5.3.c Rfrentiel li au champ tournant 19
II.6 Modlisation de moteur synchrone aimant permanent dans le plan de Park 19
II.6.1 Equations lectriques.. 20
II.6.2 Equations magntiques 20
II.6.3 Expression du couple lectromagntique 20
II.6.4 Equations du mouvement 21
II.6.5 Reprsentation dtat... 21
II.7 Rsultats de simulation 25
II.8 Modlisation de lassociation MSAP- Onduleur de Tension.. 26
II.8.1 Introduction. 26
II.8.2 Onduleur de tension 26
II.8.3 Modlisation de londuleur de tension 26
II.8.4 Stratgies de commande de la (MSAP).. 28
II.8.4.1 Commande en couple.. 28
II.8.4.2 Premire stratgie : utilisation du couple rluctant. 29
II.8.4.3 Deuxime stratgie : simplifier la loi couple- courant 31
II.8.4.4 Stratgie de contrle du courant dans le cas de lalimentation par un 31
onduleur de tension
II.8.5 Contrle par hystrsis 31
II.8.5.1 Contrle des courants par modulation de largeurs dimpulsions (MLI). 32
A) Modulation naturelle (sinus - triangle) 32
B) Modulation rgulire symtrique (chantillonne). 33
C) La SVM (Space Vector Modulation).. 34
II.9 Conclusion 36
Chapitre III
Commande vectorielle de la MSAP
III.1 Introduction 37
III.2 Principe de la commande vectorielle.. 37
III.3 Commande vectorielle de la (MSAP). 38
III.3.1 Commande vectorielle de la (MSAP) alimente en tension... 39
III.4 Dcouplage. 40
III.5 Rgulation... 42
III.5.1 Calcul des rgulateurs de courant... 43
III.5.2 Calcul de rgulateur de vitesse... 45
III.6 Interprtation des rsultats. 46
III.7 Conclusion.. 49
Chapitre IV
Commande directe du couple de la MSAP
IV.1 Introduction 50
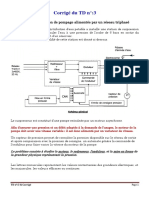
VI.2 Principes gnraux de la commande directe du couple......................... 50
IV.3 Fonctionnement et squences dun onduleur de tension triphas.................. 52
IV.4 Stratgie de commande directe de couple et de flux.. 53
IV.4.1 Contrle du vecteur de flux statorique 53
IV.4.2 Contrle du couple lectromagntique.. 54
IV.5 Slection du vecteur de tension.. 55
IV.6 Estimation du flux et du couple.. 56
IV.6.1 Correction de flux en utilisant un comparateur hystrsis deux niveaux.. 57
IV.6.2 Correction du couple en utilisant un comparateur hystrsis trois niveaux.. 58
IV.7 Elaboration des tables de commutation.. 59
IV.7.1 Elaboration de table de commutation avec squences nulles. 59
IV.7.2 Elaboration de la table de commutation sans squences nulles. 60
IV.8 Structure gnrale de la DTC applique au MSAP... 61
IV.9 Rsultats de la simulation et interprtation 62
IV.9.1 Dmarrage vide (en l'absence de la charge).. 62
a) Teste de robustesse pour linversion du sens de rotation de la machine 64
b) Test de robustesse pour une variation de la charge 66
IV.10 Conclusion.. 68
Conclusion gnrale et perspectives 69
Annexe
Rfrences bibliographiques
Nomenclature
MSAP Moteur synchrone aimant permanant
DTC La commande directe du couple
MLI Modulation de largeur dimpulsion
i P
K K , Coefficient proportionnel- intgral
t Constante du temps lectrique
q d
e e , Composantes de la force lectromotrice de compensation
PI Rgulateur Proportionnel Intgrateur
S Oprateur de Laplace
0
Permabilit du vide
r
Permabilit relative de laimant
p
J Polarisation magntique permanente
B Induction magntique
H Le champ magntique
C B A , , Axes lis aux enroulements triphass
q d, Axes de rfrentiel de Park
| o, Axes de rfrentiel statorique
u Angle entre le stator et le rotor
c b a
V V V , , Tension statorique phase a, b, ou c
S
V Tension statorique
q d
V V , Tension statorique sur laxe d et laxe q
V
,V
Tension statorique sur laxe ,
c b a
I I I , ,
Courant statorique phase a, b, ou c
- - -
c b a
I I I , ,
Les courants de phases de rfrence
S
I Courant statrorique
q d
I I ,
Courant statorique sur l'axe d et laxe q
qref dref
I I ,
Courant de rfrence sur l'axe d et laxe q
I
,I
Courant statorique sur l'axe ,
q d
I I
Courant statorique estimer sur l'axe d et laxe q
c b a
| | | , , Flux statorique phase a, b, ou c
q d
| | , Flux statorique sur l'axe d et laxe q
| o
| | , Flux statorique sur l'axe ,
s
| Flux statorique
r
| Flux magntique du rotor
s
|
Flux statorique estim
s
| Vecteur de flux statorique
s
| A Variation du vecteur flux statorique
f
L Inductance de la bobine dexcitation
S
L Inductance cyclique propre statorique
| | Lss Matrice dinductances statorique
| | Msf Matrice des inductances mutuelles du couplage stator/ rotor
| | ) (u P Matrice de transformation de Park
| | C Matrice de transformation de concordia
| |
t
cn bn an
V V V , , Tension de sortie de londuleur
S
i
(i=1, 2,3) Grandeurs boolennes de commende (des interrupteurs de londuleur)
Uc Tension continue
O Vitesse mcanique de rotor
rf
O
Vitesse de rfrence
S
e Pulsation de frquence statorique
e Pulsation de frquence rotorique
e
C
Couple lectromagntique dlivr par le moteur
r
C Couple rsistant
f
C
Couple de frottement
e
C
Couple lectromcanique estim
S
R La rsistance statorique
d
L Linductance sur laxe d
q
L Linductance sur laxe q
P Nombre de paires de ples
J Moment dinertie du moteur
f Coefficient de frottement visqueux
Liste des figures
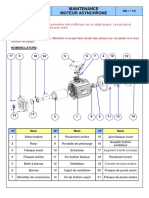
I.1 Moteur synchrones inducteur bobin 4
I.2 Structure des machines aimants permanents 5
I.3 Stator et rotor de la machine synchrone aimants permanents 7
I.4 Diffrents structures des rotors des MSAP 8
I.5 Courbes de B(H) de diffrents aimants 10
I.6 Diffrents formes des aimants permanents 11
II.1 Schma de la machine synchrone aimant permanent 14
II.2 Les diffrents couples qui agissent sur le rotor 16
II.3 Schma quivalent dune (MSAP) dans le repre (d,q) 19
II.4 Le modle de la machine dans le repre de Park 22
II.5 Rsultat de simulation de moteur synchrone aimants permanents
aliment par un rseau triphas quilibr 24
II.6 Schma de lassociation MSAP onduleur de tension 26
II.7 Schma de londuleur triphas 27
II.8 Contrle des courants sinusodaux par hystrsis 32
II.9 M.L.I chantillonnage naturel 33
II.10 Echantillonnage rgulier symtrique 33
II.11 Synoptique de la modlisation de la SVM sous Simulink 34
II.12 Signaux de commande de la SVM 35
III.1 Commande par orientation du flux de la MSAP(
ds
I nul) 38
III.2 Schma bloc dune rgulation de vitesse de la MSAP alimente en tension et
commande par lorientation du flux 39
III.3 Description des couplages 40
III.4 Dcouplage par compensation. 41
III.5 Commande dcouple 42
III.6 Schma bloc reprsentant la (MSAP) aprs lorientation du flux 42
III.7 Commande des courants en deux boucles indpendantes 43
III.8 Commande de la vitesse45
III.9 Rponses de la MSAP en charge avec (C
r
=5 N.m t=0.1 s) 47
III.10 Rponse de la MSAP pour une inversion de la vitesse t=0.1s 48
IV.1 Schma structurel dune commande DTC applique une (MSAP) 51
IV.2 Squence de fonctionnement dun onduleur, et partition du plan
complexe en 6 secteurs angulaires 52
IV.3 Evolution du vecteur de flux statorique dans le plan ) , ( | o
54
IV.4 partition du plan complexe en six secteurs angulaires S
i=16
56
IV.5 a) Slection des tensions V
i
correspondant au contrle de lamplitude de flux
statorique
s
| , 58
b) Comparateur hystrsis utilis pour contrler le module de vecteur de
flux statorique. 58
IV.6 : comparateur hystrsis trois niveaux utiliss pour le rglage du couple
Electromagntique 59
IV.7 Schma de la commande gnrale du contrle direct de couple
dune (MSAP) 61
IV.8 Rsultats de simulation pour un dmarrage vide 63
IV.9 Rsultats de simulation pour inversion de la vitesse 65
(+100 rad/s -100rad/s)
IV.10 Rsultats de simulation pour application de couple de charge 67
Liste des tableaux
I.1 Principales caractristiques magntiques des familles daimants 10
IV.1 Table gnralise des vecteurs de tension dune commutation par DTC. 60
IV.2 Table de la DTC classique dfinissant les squences dun onduleur. 60
IV.3 Table de commutation sans squence nulles 60
Introduction gnrale :
Bien que la plus ancienne des machines lectriques industrielles, la machine courant
continu reste trs utilise et particulirement comme actionneur. Ceci tient au fait que son
fonctionnement est dune grande simplicit, de mme que sa modlisation, mais surtout ses
performances statiques et dynamiques sont exceptionnelles. En effet le couple est le produit
vectoriel de deux grandeurs naturellement orthogonales (flux inducteur et courant dinduit)
quasiment indpendantes de la vitesse et de la position du rotor [1]. Cependant, la fragilit du
systme balai collecteur a toujours t un inconvnient de la M.C.C, ce qui limite la puissance
et la vitesse maximale et prsente des difficults de maintenance et des interruptions. Cest
pour cette raison quon a eu intrt utiliser des moteurs lectriques courant alternatif afin
dcarter cet inconvnient.
La machine synchrone aimants permanents est un actionneur lectrique trs robuste et
prsente de faibles moments dinertie ce qui lui confre une dynamique caractrise par de
trs faibles constantes de temps et permet de concevoir des commandes de vitesse, de couple
ou de position avec une prcision et des performances dynamiques trs intressantes
(actionneurs de robotique, servomoteur, entranement vitesse variableetc.). Mais le
modle du moteur synchrone aimants permanents correspond un systme multi variable et
fortement coupl, cest pour cette raison que sa commande est plus complexe que celle dune
MCC [2].
La mise au point des aimants permanents base de terre rare, le dveloppement de
llectronique de puissance et la progression des organes de commande numrique. Parmi les
nombreuses mthodes de commande dveloppes dans la littrature technique, la commande
vectorielle par orientation du flux de la machine synchrone aimants permanents permets
denvisager des variateurs de vitesse courant alternatif trs comptitifs et aussi performants
que les variateurs courant continu.
En revanche, lorsque des performances svres sont requises, les commandes classiques
atteignent vite leurs limites. En effet, lune des principales difficults rencontres dans la
commande des procds est la prsence de retard due essentiellement aux caractristiques
physique du systme contrler (constante de temps dlments chauffants, acquisition-
conversion de signaux).Ces retards sont souvent la cause de problmes rencontrs lors de
lapplication de commande classique. Cest pour rsoudre ce type de problme qua t
introduite la notion de commande DTC.
Notre mmoire a pour objet l'tude de la commande sans capteur de vitesse par la
commande directe du flux statorique et du couple lectromcanique appele simplement
(CDFC) applique au moteur synchrone aimants permanents (MSAP). Cette technique de
commande connat un dveloppement important ces dernires annes notamment avec
l'volution de l'intgration des techniques nouvelles de l'intelligence artificielle telles que, les
rseau de neurones, la logique floue, les algorithmes gntiques,etc. Le prsent travail est
scind en cinq chapitres
Dans le premier chapitre et tout au dbut nous expliquons les diffrentes machines
synchrones vitesse variable, et aprs avoir rappel les principes gnraux des machines
synchrones aimants permanents(MSAP) nous expliquons les comportements spcifiques des
matriaux et les lments les constituant .
Introduction gnrale
1
Le deuxime chapitre a t consacr l'tude et la modlisation de l'association
convertisseur machine (MSAP). Dans cette partie on prsentera le modle mathmatique du
moteur tabli dans un repre deux axes bas sur des hypothses simplificat.
Le troisime chapitre fera l'objet de l'application de la commande vectorielle par
orientation du flux rotorique la machine synchrone aimants permanents.
Pour contourner les problmes de sensibilit aux variations paramtriques, des mthodes
de contrle ont t dveloppes dans lesquelles le flux statorique et le couple
lectromagntique sont estims partir des seules grandeurs lectriques accessibles au stator.
L'tude du contrle direct de couple (DTC) et l'aspect robustesse sont aussi tudis. C'est ainsi
que le quatrime chapitre sera architectur. Pour clore ce travail nous avons mis une
conclusion gnrale et des perspectives envisager.
Introduction gnrale
2
Chapitre I
Ltat de l'art
des machines synchrones
aimants permanents
I.1. Introduction :
Le terme de machine synchrone regroupe toutes les machines dont la vitesse de rotation
de larbre de sortie est gale la vitesse de rotation du champ tournant. Pour obtenir un tel
fonctionnement, le champ magntique rotorique est gnr soit par des aimants, soit par un
circuit dexcitation. La position du champ magntique rotorique est alors fixe par rapport au
rotor, ce qui impose en fonctionnement normal une vitesse de rotation identique entre le rotor
et le champ tournant statorique.
Cette famille de machine regroupe en fait plusieurs sous familles, qui vont de lalternateur
de plusieurs centaines de mgawatts au moteur de quelques watts, en passant par les moteurs
pas pas. Nanmoins, la structure de toutes ces machines est relativement proche. Le stator
est gnralement constitu de trois enroulements triphass rpartis, tel que les forces
lectromotrices gnres par la rotation du champ rotorique soient sinusodales o
trapzodales.
Les stators, notamment en forte puissance, sont identiques ceux dune machine
asynchrone. Il existe trois grandes familles de rotor, ayant pour rle de gnrer le champ
dinduction rotorique. Les rotors bobins ples lisses, les rotors bobins ples saillants
ainsi que les rotors aimants [3].
I.2. Machines Synchrones rotors bobins :
Dans le cas des moteurs rotors bobins, le rotor supporte un bobinage monophas
aliment par un courant continu tandis que le stator est quip d'un bobinage polyphas
courant alternatifs. L'obtention d'une valeur de couple moyen non nulle passe alors par la
vrification de la condition de synchronisme qui impose une galit stricte entre vitesse du
champ tournant stator et vitesse du champ tournant rotor.
Afin de s'en parer des contacts glissants (bague balais) comme pour les machines
courant continu, les machines synchrones rotor bobin font appel, le plus souvent, une
excitatrice (ou alternateur d'excitation) associe un redresseur tournant, pour liminer tout
contact glissant. Cet alternateur auxiliaire dont l'induit est accoupl l'arbre de la machine
dbite dans l'inducteur, par l'intermdiaire du pont redresseur diodes tournant aussi avec
l'arbre de la machine.
I.3. Machines Synchrones rotors bobins ples lisses
Plutt adaptes pour des applications forte puissance et grande vitesse , le bobinage est
dans ce cas log dans des encoches pratiques dans la masse du rotor et fermes par des
clavettes en acier amagntique (Figure I.1.b). Les ttes de bobines inductrices sont
maintenues en place par des frettes en acier amagntique. L'entrefer tant d'paisseur
constante, seule la rpartition des encoches et /ou leur remplissage constitue un paramtre
structurel jouant sur la forme d'onde des f.e.m attendues. Une disposition approprie permet
d'obtenir des f.e.m sinusodales trs faible taux d'harmoniques.
Chapitre I Ltat de lart des machines synchrones aimants permanents
3
Fig.I.1 : Moteur synchrones inducteur bobin
a) rotor pole saillants, b) rotor pole lisses
I.4. Machines Synchrones rotors bobins ples saillants
Pour les machines rotors ples saillants (Figure I.1.a), les bobines inductrices sont
montes autour de noyaux polaires massifs ou feuillets. Pour ces machines, le rotor est un
lectroaimant dont les ples sont alternativement nord et sud. Les enroulements sont
aliments en courant continu, ils sont placs autour des noyaux polaires. Le nombre de ples
est toujours pair, il varie suivant la machine. Elles sont utilises pour des applications qui
ncessitent une simplicit de constitution. Ce type de machine possde un facteur de
puissance relativement faible qui impose un surdimensionnement des convertisseurs statiques,
ceci est un inconvnient pour la l'alimentation frquence variable. Pour des application de
faible puissance aux environ de quelques kilowatts on peut s'affranchir de cette faiblesse de ce
genre des machines.
I.5.Gnralits sur les machines lectriques aimants permanents [4]
Avec lavnement des matriaux aimants permanents de haute nergie et les progrs
raliss dans le domaine de llectronique de puissance, les moteurs aimants permanents ont
connu ces dernires annes un grand essor. Ils ont t adopts dans de nombreuses
applications de hautes performances telles que la robotique, larospatiale, les outils
lectriques, la production des sources dnergie renouvelables, les divers quipements
mdicaux, les vhicules lectriques et hybrides, etc. Pour toutes ces applications, les machines
aimants permanents sont parfois prfrables aux autres machines traditionnelles, telles que
les machines courant continu, les moteurs synchrones classiques et les moteurs asynchrones
et en particulier pour les applications spcifiques (servomoteur vitesse variable). A titre
dillustration, quelques avantages des machines aimants permanents, sont cits ci-dessous :
- Labsence denroulement rotorique annule les pertes joules au niveau du rotor.
- Le couple volumique et la puissance massique importants permettent une meilleure
compacit.
- Labsence des collecteurs et des balais simplifie la construction et lentretien.
Chapitre I Ltat de lart des machines synchrones aimants permanents
4
- La densit de flux, relativement leve dans lentrefer, assure une trs bonne
performance dynamique.
De plus, les machines aimants permanents (brushless) sont capables de fonctionner avec
un facteur de puissance proche de lunit. Le contrle prcis et rapide du couple, de la vitesse
et de la position est possible avec un simple onduleur de tension triphas.
Selon les principes de fonctionnement, les machines aimants permanents peuvent tre
classes en trois types :
- Les machines courant continu et aimants permanents (MCC).
- Les machines aimants permanents sans balais (MAPSB).
- Les machines synchrones aimants permanents sans balais (MSAP).
La figure (I.2) montre la configuration de ces trois types.
FigI.2 : Structure des machines aimants permanents
Chapitre I Ltat de lart des machines synchrones aimants permanents
5
I.5.1.Les machines courant continu et aimants permanents (MCC)
Ce sont les machines courant continu dans lesquelles le champ magntique, cre par les
lectroaimants, est remplac par celui des aimants permanents. En consquence, les pertes
joules lies aux bobinages de lexcitation sont limines, mais le champ de lexcitation nest
plus contrlable. Ceci limite leur utilisation aux applications de faible puissance et de haute
dynamique ne ncessitant pas une fonction en mode de dfluxage.
I.5.2.Les machines aimants permanents sans balais
Les progrs dans la technologie des semi-conducteurs ont conduit au dveloppement
dautres types des machines courant continu o la commutation avec le systme balais
collecteur est remplac par la commutation lectronique. Dans ces machines, les aimants
permanents sont situs sur la partie tournante et le stator est constitu de trois enroulements
aliments par les formes donde carres fournies un convertisseur. La commutation du
convertisseur est contrle de telle faon que, chaque instant, seulement deux phases
conduisent. Ce systme de commutation lectronique est fonctionnellement quivalent la
commutation du balais mcanique de la machine courant continu. Par consquent, ce type
de machine aimants permanents est connu comme la machine aimants permanents sans
balais (MAPSB) (Brushless PMDC) ou la machine aimants permanents avec forme donde
carre (Squarewave PMDC). La machine MAPSB est prfrable pour des nombreuses
applications du fait quelle ne ncessite que peu dentretien, elle prsente un rendement lev
et sa loi de commande est relativement simple.
I.5.3.Les machines synchrones aimants permanents (MSAP)
Dans les machines synchrones aimants permanents, les aimants sont aussi situs sur la
partie tournante. Le stator est constitu dun enroulement triphas distribu sinusodalement,
comme montr sur la figure(I.2,c,d) .Concernant son fonctionnent, il est bas sur le principe
de rotation du champ magntique en synchronisme avec le rotor ; do le nom des machines
synchrone aimants permanents(MSAP).
Dans la plupart des applications, un onduleur est ncessaire pour avoir une alimentation
avec une tension et une frquence variable, o le champ tournant rotorique peut tre gard en
synchronisme avec la sortie de londuleur pour une vitesse allant de zro sa vitesse
maximale.
Pour les (MAPSB) ou (MSAP), linformation de la position rotorique est essentielle pour
la commande lectrique. Par consquent, dans ces machines, linterface physique avec un
codeur ou rsolveur est invitable. Avec le dveloppement des algorithmes destimation de
position cette contrainte peut tre limine.
Chapitre I Ltat de lart des machines synchrones aimants permanents
6
Stator Rotor
Fig.I.3 : stator et rotor de la machine synchrone aimants permanents
I.5.4.Les rotors de la machine aimants permanents
Les machines aimants permanents peuvent tre construites avec plusieurs de
configurations rotoriques. Leur classification globale en terme du placement des aimants est
le suivant :
- Aimants en surface (Surface maget type)
- Aimants insrs (Inset magnet type)
- Aimants enterrs (Ierior magnet type)
- Aimants concentration de flux (Burried magnet type)
I.5.4.1.Aimants en surface
Pour ces types de machines, les aimants sont placs sur du rotor, ils sont aimants
radialement, comme montr sur la figure (a). Cette configuration du rotor est la plus utilise.
Le principale avantage de la machine avec des aimants en surface est sa simplicit donc faible
cot de fabrication par rapport dautre machines aimant. Linconvnient est lexposition
des aimants permanents aux champs dmagntisants. De plus, les aimants sont soumis des
forces centrifuges qui peuvent causer leur dtachement du rotor. Parfois, un cylindre externe
non ferromagntique de haute conductivit est utilis. Il protge les aimants permanents de la
dsaimantation, de la raction de linduit et des forces centrifuges. Ce cylindre peut en plus
fournir un couple de dmarrage asynchrone et agir comme un amortisseur. Dans le cas des
aimants du type terres rares la ractance synchrone dans laxe- d et laxe- q sont,
pratiquement les mmes.
Chapitre I Ltat de lart des machines synchrones aimants permanents
7
Fig.I.4 : Diffrents structures des rotors des MSAP
I.5.4.2.Aimants insrs
Comme des machines avec aimants en surface, les aimants du type insrs sont aussi
monts sur la surface du rotor. Toutefois, les ouvertures entre les aimants permanents sont
partiellement remplies avec le fer, comme montr sur la figure (b). Le fer entre les aimants
permanents cre une saillance et donne un couple rluctant en plus du couple des aimants. La
ractance synchrone de laxe- q est lgrement suprieure celle dans laxe- d .
I.5.4.3.Aimants enterrs
Les machines aimants enterrs sont des machines avec des aimants intgrs dans le rotor
figure(c) et aimants radialement. Du fait que la surface du ple magntique est plus petite
que celle du rotor, linduction dans lentrefer est plus faible que linduction dans laimant. La
ractance synchrone dans laxe- d est plus petite que celle de laxe- q .Les aimants dans cette
configuration sont trs bien protgs contre les forces centrifuges. Cette configuration du
rotor est recommande pour les applications grandes vitesses.
I.5.4.4.Aimants concentration de flux
Une autre faon de placer les aimants permanents dans le rotor est de les enterrs
profondment lintrieur du rotor. Ici, les aimants sont aimants dans le sens de la
circonfrence figure (d). Les ples magntiques se forment alors niveau des parties
ferromagntiques du rotor par concentration de flux provenant des aimants permanents.
Chapitre I Ltat de lart des machines synchrones aimants permanents
8
Lavantage de cette configuration par rapport aux autres est la possibilit de concentrer le
flux gnrs par les aimants permanents dans le rotor et dobtenir ainsi une induction plus
forte dans lentrefer. Comme les machines aimants permanents intrieurs, les aimants
permanents de cette dernire sont aussi bien protgs contre la dsaimantation et les
contraintes mcaniques. La ractance synchrone sur laxe- q est plus grande que celle de laxe-
d .
I.5.5. Les matriaux magntiques
Les performances des MSAP sont intrinsquement lies aux matriaux magntiques mis
en oeuvre au sein de leur structure Dans ce cadre, nous distinguerons :
La source de champ rotorique constitue daimants fritts ou lis ;
Les circuits magntiques constituent de tles ou de matriaux magntiques composites.
Ces circuits doivent naturellement limiter les fuites (bonne permabilit), et reprsenter un
volume rduit (induction saturation leve). Ils ne doivent pas tre la source de pertes trop
importantes qui nuiraient aux performances du moteur. Dun point de vue mcanique, le
matriau doit aussi tenir les contraintes de dformation que les efforts lectromagntiques ou
la vitesse lui feront subir, tout en tant aisment usinable pour simplifier le process
dindustrialisation Thermiquement, le matriau si possible isotrope, doit tre un bon
changeur entre essentiellement le bobinage et lenvironnement extrieur [5].
I.5.5.1. Les aimants
I.5.5.1.1. Aimants permanents fritts
Les aimants permanents sont des matriaux durs, caractriss par une polarisation
rmanente ,
r P
B J = un champ coercitif daimantation H
c
, et une nergie spcifique maximale
. ) (
max
BH Dun point de vue macroscopique, ltat magntique dun aimant est dcrit par trois
vecteurs[6] [7] :
linduction magntique B,
le champ magntique H,
la polarisation rmanente de laimant J
p.
Laimantation de laimant est la rsultante dune aimantation rmanente J
p
et dune
aimantation induite par un champ extrieur ) (
0
H J
m ext
_ = . H o
m
_ est la susceptibilit
magntique du matriau (qui dpend du champ appliqu). Par consquent, on peut crire la
relation suivante :
| |
P m m
P
J H H H H
J
H B + + =
(
+ + = ) ( 1 ) (
0
0
0
_ _
Soit encore, en introduisant la permutabilit relative de laimant ( ): 1 H + =
m r
_
p r
J H H B + = ) (
0
Pour les machines tournantes, la partie utile de la caractristique B (H) des aimants se
situe dans le quart de plan o H <0 et B >0. On parle de caractristique de dmagntisation
lorsquun champ extrieur est appliqu pour sopposer laimantation rsiduelle de laimant
(Figure 1.5).
Chapitre I Ltat de lart des machines synchrones aimants permanents
9
Fig.I.5 : courbes de B(H) de diffrents aimants
Les aimants permanents que lon peut rencontrer dans les machines sont principalement
les ferrites et les AlNiCo et les aimants terres rares :(Le Samarium-Cobalt et le Nodyme-Fer-
Bore ) dont les principales caractristiques sont regroupes dans le tableau 1.1) [8].
Proprits Units Alnico Ferrite Sm-co Nd-Fe-B
Champ
rmanent B
r
T 0,61.35 0,350.43 0,71.05 1,01,3
Champ
coercitif
intrinsque H
ci
KA/m 40130 180400 8001500 8001900
(BH) max KJ/m
3
20100 2436 140220 180320
Coefficient de
temprature B
r
%/C -0,01 -0.2 -0,045 -0,08
-0,02
-0.05 -0,15
Coefficient de
temprature H
ci
%/C -0,02 0,20,4 0,2 0,25 -0,5-0,9
Temprature
maximum de
fonctionnement
C 500550 250 250350 80200
Tab. .1: Principales caractristiques magntiques des familles daimants
Lanalyse du tableau prcdent permet dmettre quelques conclusions slectives :
Alnico : Les aimants en Alnico ont un champ rmanent trs lev, mais un champ coercitif
trs faible, ce qui pose de gros problmes de dmagntisation. Ces aimants ne peuvent tre
sortis de leur circuit magntique, sous peine de les dsaimanter.
Ferrite : cest le composant le plus ancien et le moins cher. Ses performances modestes le
cantonnent cependant dans les machines de faible puissance massique. Cest un matriau trs
cassant mais rsistant la corrosion. Par ailleurs, ce sont des aimants fortement sensibles la
Chapitre I Ltat de lart des machines synchrones aimants permanents
10
dmagntisation basse temprature et possdent une polarisation rmanente relativement
faible qui ne les prdisposent pas aux contraintes aronautiques [9] [10].
Images daimants terres-rares
Images daimants ferrites
Images daimants Alnico
Fig.I.6 : Diffrents formes des aimants permanents
Nodyme-Fer-Bore : cest la version la plus performante. Les progrs constants raliss ces
dernires annes dans leur laboration, et leur cot infrieur aux Samarium-Cobalt, leur
assurent une quasi-exclusivit pour un grand nombre dapplications. Naturellement sensible
la corrosion, des techniques rcentes de traitement tendent diminuer fortement lusure.
Cependant ils sont encore dfavoriss par leur tenue la temprature leve et dans le cas de
la haute vitesse par une conductivit pnalisante.
Samarium-Cobalt : ceux sont les premiers aimants terres rares apparus sur le march. Leur
nergie spcifique est trs suprieure celle des ferrites, de mme que leur prix. Compte tenu
de sa bonne tenue en temprature (>300C) et aux champs inverses levs, ce composant est
propice certaines applications (militaire, nuclaire...) Ils constituent dans ce contexte le
meilleur compromis en terme de performance face un environnement thermique svre tel
que lon trouve dans des applications aronautiques.
Chapitre I Ltat de lart des machines synchrones aimants permanents
11
I.5.5.1.2. Aimants lis
Actuellement, les aimants fritts souffrent dune forte sensibilit la temprature et de
caractristiques mcaniques dficientes pour certains types dapplications (problme de
collage et de rsistance aux sollicitations mcaniques). Dans ce contexte, les aimants lis
prsentent des atouts en partie dus leur faciliter dutilisation et de manipulation. Ces aimants
lis obtenus par mlange homogne de poudres daimants et de matriaux polymres, se
distinguent par trois procds de fabrication donnant lieu des matriaux injects, compresss
ou calandrs. Pour ces deux dernires catgories, le produit final isotrope ou anisotrope peut
avoir des formes complexes grce un usinage direct moyennant quelques prcautions
(arrosage pour limiter lchauffement, protection contre la corrosion des surfaces usines).
[11].
I.5.5.2. Des matriaux magntiques doux
Outre les aimants, le circuit magntique de la (MSAP) est constitu de matriaux
ferromagntiques doux, dont linduction en zone de fonctionnement linaire, suit la loi
suivante H B
r
0
= o He[100, 10000] selon le matriau, alors quen zone de saturation,
on distingue simplement ce matriau par son induction Bsat comprise entre 1,2 et 2,4T suivant
les composants de base.
I.5.5.2.1. Matriaux lamins
Les matriaux lamins reprsentent en volume, la part majeure des machines. Dans la
gamme des matriaux participant la conversion lectromcanique, les composants lamins
constituent srement le volume le plus utilis. Le flux statorique tant variable, le stator est
compos dun empilement de tles en Fe-Si de 10 65 centimes de millimtres dpaisseur
pour limiter les pertes. Les divers alliages proposs (Fe-Silicium, Fer-Cobalt, Fer-Nickel)
permettent de jouer de faon significatives sur les proprits magntiques, mcaniques ou
dilectriques. Divers matriaux ont ainsi t dvelopps pour, par exemple rduire les pertes
fer ou privilgier linduction de saturation.
1.5.5.2.2. Matriaux composites
Les SMC sont des mlanges de poudres de fer et de liants isolants lectriques qui sont
compresss, recuits et mouls pour obtenir la forme dsire. Les particules de fer sont
indpendantes les unes des autres ; il nexiste pas darrangement cristallin de ces particules, ce
qui se traduit par un cycle dhystrsis plus large et donc par des pertes associes plus
importantes. A linverse, la nature particulaire et lisolation lectrique de chaque particule
(augmentation de la rsistivit du matriau) procure un avantage important quant aux pertes
par courants de Foucault ; il faut noter nanmoins, que cette isolation des particules diminue
la permabilit (infrieure de 50% par rapport des matriaux lamins) et donc le niveau
dinduction. Les fabricants de SMC, par exemple Hgans ou les Poudres du Qubec, sont
capables de produire toutes les nuances de SMC, du plus isolant et faiblement permable,
jusquau moins rsistif et bon conducteur magntique, en changeant les proportions de liants,
les pressions et tempratures de recuit. Ces matriaux tant exploits dans la machine sous
forme de pices massiques (stator en une pice), les transferts de chaleur sont favoriss et
entranent la suppression des points chauds inhrents aux circuits empilement. La
machine peut dans ce contexte gagner en puissance massique o lon augmente la densit de
courant.
Chapitre I Ltat de lart des machines synchrones aimants permanents
12
I.6.Conclusion
Dans cette optique, ltude sorientera dans un premier temps vers les diffrentes
machines synchrones, puis les aspects structurels des diffrents types daimants
permanents et de matriaux ferromagntiques ainsi que leurs proprits. Dans le contexte
de lapplication qui nous concerne, nous optons pour le choix dun aimant permanent de
type NdFeB nouvelle nuance de terre rare pour les machines aimants permanents et qui
permet de prserver les performances sans pour autant sacrifier le cot de ralisation de la
machine et aussi la technologie la plus volutive.
Chapitre I Ltat de lart des machines synchrones aimants permanents
13
Chapitre II
Modlisation
de la machine synchrone
aimants permanents
II.1.Introduction
Il y a quelques annes, les programmes de simulation faisaient intervenir la transformation
de Clarke ou celle de park. Pour pouvoir effectuer une simulation de la machine synchrone
dans un temps relativement court. A ce jour, grce l'volution des technologies
informatiques et des processeurs en particulier, nous pouvons nous en passer de ces
transformations, ce qui permet dans le cas de la machine synchrone aimants permanents
dtudier sa commande dans les diffrents rgimes de fonctionnement transitoire et
permanent.
Avant dtablir le modle mathmatique nous nous imposons quelques hypothses :
- le circuit magntique de la machine nest pas satur,
- les f.e.m sont rpartition sinusodale,
- leffet de la temprature sur les rsistances est ngligeable,
- lhystrsis et les courants de Foucault sont ngligeables,
- lentrefer est dpaisseur uniforme [12].
II.2.Les quations lectriques des machines synchrones aimants permanents [13]
Fig. II.1 : Schma de la machine synchrone aimant permanent
Du stator
(
(
(
+
(
(
(
=
(
(
(
c
b
a
c
b
a
S
c
b
a
dt
d
i
i
i
R
v
v
v
|
|
|
(II.1)
Avec :
q
as
c
v
d
bs
cs
F
b
v
a
v
f
v
Chapitre II Modlisation de la machine synchrone aimants permanents
14
:
S
R La rsistance des phases statoriques ;
| |
t
c b a
v v v : Vecteur tensions des phases statoriques
| |
t
c b a
i i i : Vecteur courants des phases statoriques
| |
t
c b a
| | | : Vecteur flux des phases statoriques
| |
(
(
(
=
S
S
S
S
R
R
R
R
0 0
0 0
0 0
R
S
: rsistance par phase statorique.
Du rotor
| | | || | | |
f f f f
dt
d
I R V | + = (II.2)
| |
(
(
(
=
0
0
f
f
I
I | |
(
(
(
=
0 0 0
0 0 0
0 0
f
f
R
R | |
(
(
(
=
0
0
f
f
V
V (II.3)
II.3.Equations magntiques
Flux statorique:
| | | || | | || |
f Sf S S S
I M I L + = | (II.4)
La matrice [L
S
] est une matrice carre et dordre 3*3, elle contient des termes constants que
nous regroupons dans [L
S0
], et les termes variables dpendent de , que nous regroupons
dans[L
S2
()] posons :
)] ( [ ] [ ] [
2 0
u
S S S
L L L + = (II.5)
| |
(
(
(
=
SO SO SO
SO SO SO
SO SO SO
SO
L M M
M L M
M M L
L (II.6)
Chapitre II Modlisation de la machine synchrone aimants permanents
15
| |
(
(
(
(
(
(
+
+
+
=
)
3
2
( 2 cos ) 2 cos( )
3
4
( 2 cos
) 2 cos( )
3
4
( 2 cos )
3
2
( 2 cos
)
3
4
( 2 cos )
3
2
( 2 cos ) 2 cos(
) (
2 2
t
u u
t
u
u
t
u
t
u
t
u
t
u u
u
S S
L L (II.7)
Les inductances propres et mutuelles 2 , , Ls Mso Lso sont des constantes.
Flux rotorique
| | | || | | || |
S Sf f f f
I M
dt
d
I L + = | | |
(
(
(
=
0 0 0
0 0 0
0 0
f
f
L
L (II.8)
] [
Sf
M : est le matrice inductance qui correspond au couplage entre le rotor et le stator.
| |
(
(
(
(
(
(
=
)
3
4
cos(
)
3
2
cos(
cos
t
u
t
u
u
f Sf
M M et [M
Sf
] =[M
fS
]
t
(II.9)
II.4.Equation mcanique
Les seules pices mobiles d'une (MSAP) sont le rotor et son roulement, et la robustesse et
la fiabilit de cette machine est une consquence directe de sa structure peu complique. A cet
effet, lapplication de la deuxime loi de newton dans cette approche dfinit aisment. La
dernire quation mcanique du modle de systme dquations fondamentales de la MSAP
comme suite :
dt
d
J C
i
i
O
=
(II.10)
dt
d
J C C C
f r e
O
= (II11)
O = f C
f
(II.12)
Fig. II.2 : Les diffrents couples qui agissent sur le rotor
Cr C
f
Ce
Cr
Chapitre II Modlisation de la machine synchrone aimants permanents
16
: la vitesse de rotation mcanique de la MSAP
J : le moment d'inertie du moteur
f : le coefficient de frottement visqueux
C
e
: le couple lectromagntique dlivr par le moteur
C
r
:le couple rsistant ou de charge
II.5.Transformation triphas- diphas [14]
II.5.1.Principe de la transformation de park
Les modles des machines lectriques les plus utiliss sont bass sur la thorie unifie des
machines lectriques. Cette thorie est base sur la transformation de park, qui rapporte les
quations lectriques et toriques un systme cartsien daxes, dq.
Dans le repre classique il y a trois axes (as, bs, cs) orients suivant les axes des trois
enroulements statorique de la machine. Dhabitude, laxe as est considr comme rfrence
pour les transformations ultrieures. Quant au rotor, on a toujours un seul axe (F-
correspondant la direction de laimantation) pour la machine synchrones aimants
permanents donne la position du rotor par apport au stator.
Les trois enroulements du stator peuvent tre remplacs par deux enroulements fictifs
/2 dans lespace et aliments par des courants /2 dans le temps. Les deux enroulements
virtuels sont disposs sur les laxes d et q, o dans le cas de la MSAP (figure.II.3) laxe d est
orient suivant le rotor, c'est--dire suivant la direction de l aimantation.
Pour passer du systme triphas, abc, au systme biphas, dq,( rciproquement) il faut utiliser
les transformations de suivantes [15] [16] :
| | | || |
dqo abc
V P V ) (u = (II.13)
| | | | | |
abc dqo
V P V
1
) (
= u (II.14)
| | ) (u P et | |
1
) (
u P sont les matrices de passage directe et inverse, qui sont donnes par:
| |
(
(
(
(
(
(
=
3
4
sin( )
3
4
cos(
2
1
)
3
2
sin( )
3
2
cos(
2
1
) sin( ) cos(
2
1
3
2
) (
t
u
t
u
t
u
t
u
u u
u P (II.15)
Chapitre II Modlisation de la machine synchrone aimants permanents
17
| |
(
(
(
(
(
(
)
3
4
sin( )
3
2
sin( ) sin(
)
3
4
cos( )
3
2
cos( ) cos(
2
1
2
1
2
1
3
2
) (
1
t
u
t
u u
t
u
t
u u u P (II.16)
Le systme dq sera utilis dans la commande vectorielle des machines lectriques. Dans le
systme dq, les grandeurs lectriques sont de type continues, ce qui donne la possibilit de
faire une commande similaire la commande des machines courant continu.
II.5.2.Transformation de Concordia
Si on pose =0 dans les quations (II.15.16), les matrices de Park deviennent les matrices de
Concordia :
(
(
(
(
(
(
(
=
2
3
2
1
2
1
2
3
2
1
2
1
0 1
2
1
3
2
] [C (II.16)
(
(
(
(
(
(
2
3
2
3
0
2
1
2
1
1
2
1
2
1
2
1
3
2
] [
1
C (II.17)
Les transformations de Concordia sont utilises pour faire le passage entre le systme
triphas, abc, et un systme fictif, . Ils seront utilises dans le contrle direct du couple
DTC-direct torque control), on obtient les transformation de Concordia:
| | | || |
o abc
V P V
o|
u ) ( = (II.18)
| | | | | |
abc o
V C V
1
=
o|
(II.19)
Chapitre II Modlisation de la machine synchrone aimants permanents
18
II.5.3.Choix du Rfrentiel
Pour tudier la thorie des rgimes de la machine synchrones aimants permanents, on
peut utiliser trois systmes daxes de coordonnes du plan daxes (d,q) [17] :
II.5.3.a.Rfrentiel li au stator
Dans ce rfrentiel, les axes (d,q) sont immobiles par rapport au stator, dans ce cas la
phase as et d concident. Ce rfrentiel est mieux adapt pour travailler avec les grandeurs
instantanes. Lutilisation de ce rfrentiel permet dtudier les rgimes de dmarrages et de
freinages des machines courants alternatif.
II.5.3.b.Rfrentiel li au rotor
Dans ce rfrence, les axes (d,q) sont immobiles par rapport au rotor tournant une
vitesse
r
.lutilisation de ce systme permet dtudier les rgimes de dmarrages et
transitoires dans les machines synchrones et asynchrones.
II.5.3.c.Rfrentiel li au champ tournant
Dans ce rfrentiel, les axes (d,q) sont immobiles par rapport au champ tournant
lectromcanique cr par les enroulements du stator. Ce rfrentiel est gnralement utilis
dans le but de prvoir l'application d'une commande de vitesse, de couple, etc. puisque les
grandeurs dans ce rfrentiel sont de forme continu.
II.6.Modlisation de moteur synchrone aimant permanent dans le plan de Park
En appliquant la transformation de Park au systme d'quation, on peut exprimer tous les
vecteurs dans un repre li au rotor [18] [19].
Fig. II.3 : Schma quivalent dune (MSAP) dans le repre (d,q)
Aprs dveloppement des quations, on obtient les quations suivantes :
q
as
ds
v
ds
i
d
d
|
q
|
qs
v
qs
i
f
|
f
v
f
i
Chapitre II Modlisation de la machine synchrone aimants permanents
19
II.6.1.Equations lectriques
+ + =
+ =
d r q q S q
q r d d S d
dt
d
I R V
dt
d
I R V
| e |
| e |
(II.20)
II.6.2.Equations magntiques
Les flux peuvent tre formuls par les quations suivantes:
Sur l'axe d [20] [12]:
f d d d
I L | | + = (II.21)
d
| : Constante indiquant le champs d l'aimantation permanente du rotor:
Sur l'axe q:
q q q
I L = | (II.22)
Le modle de la (MSAP) peut s'crire sous la forme suivante :
+ + + =
+ =
) (
f d d r q q q S q
q q r d d d S d
I L I
dt
d
L I R V
I L I
dt
d
L I R V
| e
e
(II.23)
+ =
+ + =
d
q
r f
q
d
q
d
r q
q
S
q
d
d
q
d
q
r d
d
S
d
L
V
L
I
L
L
I
L
R
I
dt
d
L
V
I
L
L
I
L
R
I
dt
d
e | e
e
1
(II.24)
II.6.3.Expression du couple lectromagntique
Le couple lectromcanique C
e
est produit par linteraction entre les ples forms par les
aimants au rotor et les ples engendrs par les FMMs dans lentrefer gnres par les courants
statorique. Il est dmontr par [14] [21] :
Selon park.lexpression de la puissance transmise est la suivante:
) (
2
3
) (
q q d d
I V I V t P + = (II.25)
En remplaant V
d
, V
q
par leurs expressions on aura:
Chapitre II Modlisation de la machine synchrone aimants permanents
20
) ( ) ( ) ( [
2
3
) (
2 2
d q q d
q
q
d
d q d S
I I
dt
d
dt
d
I
dt
d
I I I R t P | |
u
|
|
+ + + + = (II.26)
: )] ( [
2
3
2 2
q d S
I I R + reprsente la puissance dissipe en pertes joules dans les
enroulements du stator
: ] [
2
3
dt
d
I
dt
d
I
q
q
d
d
|
|
+ reprsente la variation de lnergie magntique emmagasine
dans les enroulements du stator.
)] ( [
2
3
d q q d
I I
dt
d
| |
u
: reprsente la puissance lectromagntique.
Sachant que :
e = O P et O =
e e
C P (II.27)
] [
2
3
d q q d e
I I P C | | = (II.28)
Aprs affectation des oprations ncessaires on peut crire :
] ) [(
2
3
f q q d q d e
I I I L L P C | + = (II.29)
Si le rotor est lisse (L
d
=L
q
), cette quation se simplifie en:
f q e
PI C |
2
3
= (II.30)
II.6.4.Equations du mouvement
La dynamique de la machine est donne par l'quation du mouvement suivante:
dt
d
J f C C
r e
O
= O (II.31)
II.6.5.Rprsentation dtat
Selon lexpression (II.24), on aboutit la reprsentation sous la forme dquation dtat
suivante :
Chapitre II Modlisation de la machine synchrone aimants permanents
21
(
(
(
(
+
(
(
(
(
(
=
(
q
f q
d
d
q
d
q
S
q
d
d
q
d
S
q
d
L
V
L
V
I
I
L
R
L
L
L
L
L
R
I
I
dt
d
e|
e
e
(II.32)
.
A partir de (II.23), et (II.29), (II.31) le modle de le MSAP dans le repre de Park peut
tre schmatis par la figure II.5.
Fig.II.4 : Le modle de la machine dans le repre de Park.
ds S
sL R +
1
L
ds
L
ds
L
qs
L
qs
ds S
sL R +
1
f
|
P
P
P
2
3
Js f +
1
s
1
f
|
Cr
I
ds
I
qs
V
q
V
d
Chapitre II Modlisation de la machine synchrone aimants permanents
22
Temps(s) Temps(s)
Temps(s)
Temps(s)
V
i
t
e
s
s
e
(
r
a
d
/
s
)
C
o
u
p
l
e
(
N
/
m
)
C
o
u
r
a
n
t
i
d
(
A
)
C
o
u
r
a
n
t
i
q
(
A
)
vitesse de rotation [rad/s] Couple lectromagntique [N.m]
Le courant id[A] Le courant iq[A]
Chapitre II Modlisation de la machine synchrone aimants permanents
23
Fig.II.5 : Rsultat de simulation de moteur synchrone aimants permanents
aliment par un rseau triphas quilibr
V
i
t
e
s
s
e
(
r
a
d
/
s
)
C
o
u
p
l
e
(
N
/
m
)
C
o
u
r
a
n
t
i
d
(
A
)
C
o
u
r
a
n
t
i
q
(
A
)
Temps(s)
Temps(s)
Temps(s)
Temps(s)
Couple lectromagntique [N.m] vitesse de rotation[rad/s]
Le courant id [A]
Le courant iq [A]
Chapitre II Modlisation de la machine synchrone aimants permanents
24
II.7.Rsultats de simulation
Etant classique, la premire application du modle de la machine synchrone aimants
permanents consiste en sa mise en uvre dans la simulation numrique dun dmarrage direct
sur un rseau triphas quilibr (220/380V) de frquence fixe(50Hz) et sans lapplication de
perturbation(couple rsistant nul).
La simulation a t effectue sous lenvironnement MATLAB/ SIMULINK traitant le
comportement dune machine synchrone aimants permanents triphase de 0.8 kW dont les
paramtres de la machine utilise sont donns en annexe.
Par suite , on applique la MSAP un couple rsistant de 5N.m au moment de son dmarrage.
On constate, daprs les courbes de la figure II.5, que la vitesse prsente des oscillations dans
les premiers instants de dmarrage, ensuite se stabilise une valeur proche de 105rad/s.
Comme on remarque aussi au dbut du dmarrage des pics des courants (I
d
,I
q
) assez
importants qui sont prsents et cela sexplique par la F.C.E.M qui est due une faible vitesse
au dmarrage, ensuite ils se rtabliront leurs valeurs correspondantes au rgime de
fonctionnement, le courant Iq se rduit pour sannuler.
Le couple prsente aux premiers instants de dmarrage des battements importants, pendant un
intervalle de temps trs courts, avant de se stabiliser par la suite sur une valeur pratiquement
nulle en rgime permanent.
Ces rsultats montrent bien le fort couplage existant entre ces dffirentes variables indiquant
le caractre non linaire de la machine.
Chapitre II Modlisation de la machine synchrone aimants permanents
25
II.8.Modlisation de lassociation MSAP- Onduleur de Tension
II.8.1. Introduction
Aprs avoir prsent le modle de la machine, on prsentera le systme dentranement
complet o la machine synchrone aimant permanent est associe deux convertisseurs en
cascade.
Le convertisseur cot rseau est constitu dun redresseur triphas diodes et dun filtre,
et le convertisseur cot machine, un onduleur de tension triphas. La figure.II.6 illustre le
schma de principe de cette association [22] [23].
Rseau
Triphas
Fig.II.6 : Schma de lassociation MSAP onduleur de tension
II.8.2.Onduleur de tension
Les onduleurs de tension alimentent les machines courant alternatif partir dune source
de tension continue. Ils permettent dimposer aux bornes de la machine des tensions
damplitude et de frquence rglable par la commande. Une machine triphase sans liaison de
neutre est alimente par un onduleur de tension trois bras comprenant chacun deux cellules
de commutation. Chaque cellule est compose dun interrupteur, command lamorage et
au blocage et dune diode antiparallle.
II.8.3.Modlisation de londuleur de tension
Pour un onduleur triphas, les commandes des interrupteurs dun bras sont
complmentaires. Pour chaque bras il y a donc deux tats indpendants. Ces deux tats
peuvent tre considrs comme une grandeur boolenne[24].
- S
a,b,c
=1 : Interrupteur du demi-bas haut (a,bouc) ferm.
- S
a,b,c
=0 : Interrupteur du demi-bas bas (a,bouc) ferm.
La figure (II.7) montre le schma dun onduleur triphas avec sa charge.
L
Th1 Th2 Th3
Th4 Th5 Th6
C
MSAP
Chapitre II Modlisation de la machine synchrone aimants permanents
26
Fig.II.7 : Schma de londuleur triphas
Pour simplifier ltude, on supposera que [25] [26] :
la commutation des interrupteurs est instantane ;
la chute de tension aux bornes des interrupteurs est ngligeable ;
la charge triphase est quilibre, couple en toile avec neutre isol ;
Pour les tensions composes
bc ab
u u , et ,
ca
u on a :
= + =
= + =
= + =
ao co oa co ca
co bo oc bo bc
bo ao ob ao ab
u u u u u
u u u u u
u u u u u
(II.33)
bo ao
u u , et
co
u peuvent tre considres comme des tensions alimentant londuleur ( tension
continues).
Soit "n " lindice du point neutre du cot alternatif. On a :
+ =
+ =
+ =
no cn co
no bn bo
no an ao
u u u
u u u
u u u
(II.34)
bn an
u u , et
cn
u sont les tensions simples de la machine synchrone aimants permanent
Sachant que la charge est quilibre et le neutre isol alors :
0 = + +
cn bn an
u u u (II.35)
Sa Sb Sc
U
0
2
U
0
2
Sa Sb Sc
U
an
U
bn
U
cn
U
0
a
b
c
n
n
o
Chapitre II Modlisation de la machine synchrone aimants permanents
27
La substitution de (II.3) dans(III.2) aboutit :
( )
co bo ao no
u u u u + + =
3
1
(II.36)
En remplaant (III.4) dans (III.2), on aboutit :
+ =
+ =
=
co bo ao cn
co bo ao bn
co bo ao an
u u u u
u u u u
u u u u
3
2
3
1
3
1
3
1
3
2
3
1
3
1
3
1
3
2
(II.37)
Alors :
( )
( )
( )
+ =
+ =
=
c b a
o
cn
c b a
o
bn
c b a
o
an
S S S
u
u
S S S
u
u
S S S
u
u
2
3
3
2
3
(II.38)
(
(
(
=
(
(
(
2 1 1
1 2 1
1 1 2
3
1
0
u
u
u
u
cn
bn
an
(II.39)
Comme on peut le voir, les combinaisons( ) ( ) 111 =
c b a
S S S et( ) 000 correspondent au
vecteur nul. La figure (IV.2) dans le quatrime chapitre montre les six vecteurs non nuls qui
peuvent tre cres par un onduleur triphas.
II.8.4.Stratgies de commande de la (MSAP)
II.8.4.1Commande en couple
Ltude des expressions du couple nous permet de dterminer des stratgies de commande
permettant doptimiser les expressions en rgime permanent et dtablir des comparaisons
pour le choix des grandeurs de rglage de couple.
Les rgulateurs classiques de machines sont de type "boucles imbriques", c'est--dire quune
rgulation de couple est dabord faite, assurant une rponse optimale en couple, puis une
rgulation de vitesse est effectue, imbriquant la boucle de couple. Lhypothse de base dune
Chapitre II Modlisation de la machine synchrone aimants permanents
28
telle stratgie tant que les dynamiques du couple et de la vitesse sont suffisamment loignes
pour traiter sparment leurs boucles de rgulation respectives.
Lquation (III.8) donnant le couple montre que celui-ci dpend de deux variables dtat qui
sont :
d
i et
q
i (respectivement courant longitudinal et quadrature) .
( ) ( ) { }
q f d q d d q q q e
i P i L L P i i P c | | | + = = , (II.40)
Il sagit donc de dfinir une relation entre deux variable puisquil ny a quune grandeur
commander (le couple) et deux variables rguler (
d
i et
q
i ).
II.8.2.Premire stratgie : utilisation du couple rluctant
Un critre usuel pour la commande en couple consiste obtenir un rapport ( couple/
courant en ligne) maximal, en utilisant le couple rluctant du moteur.
Les courants de ligne scrivent :
+ + + =
+ =
+ =
) )
3
2
cos( )
3
2
(cos(
3
2
) )
3
2
cos( )
3
2
(cos(
3
2
) ) cos( ) (cos(
3
2
q d c
d d b
q d a
i P i P i
i P i P i
i P i P i
t
u
t
u
t
u
t
u
u u
(II.41)
En dfinissant :
2 2
q d
i i I + = (II.42)
) arcsin( ) arccos(
i
i
i
i
q
d
= = o
Nous pouvons crire les courants de ligne :
+ + =
+ =
+ =
)
3
2
cos(
3
2
)
3
2
cos(
3
2
) cos(
3
2
t
o u
t
o u
o u
P I i
P I i
P I i
c
b
a
(II.43)
Chapitre II Modlisation de la machine synchrone aimants permanents
29
Nous voyons donc que le module de courant en ligne est : I
3
2
Il sagit de calculer langleo optimal permettant dobtenir un rapport couple courant en
ligne maximal.
Soit T ce rapport rendre maximal :
{ } { }
I
I P I L L P
I
i P i L L P
I
C
T
f q d q f d q d
e
) sin( ) cos( ) ( ) ( o | o | +
=
+
= = (II.44)
Cherchons o pour lequel 0 =
c
c
o
T
) cos( ) 2 cos( ) ( o | o
o
f q d
P I L L P
T
+ =
c
c
(II.45)
Nos avons 0 =
c
c
o
T
si :
0 ) ( ) cos( ) ( cos ) ( 2
2
= + I L L P P I L L P
q d f q d
o | o (II.46)
Il y a deux solutions qui sont :
+
= =
I L L P
I L L P P P
q d
q d f f
opt
) ( 4
) ( 8 ) (
arccos
2 2 2 2
| |
o (II.47)
Le courant de ligne est compris entre zro et le courant maximal en ligne admissible par le
moteur qui est donn par :
max max
3
2
I i
a
= (II.48)
Une premire stratgie consiste prendre pour
opt
o une valeur moyenne. Nous avons alors
une lois de proportionnalit entre
d
i et
d
i :
d opt a
i tg i ) (
max
o = (II.49)
Le couple vaut alors :
q f
opt
q q d
e
i P
tg
i L L P
C |
o
+
=
) (
) (
2
(II.50)
Chapitre II Modlisation de la machine synchrone aimants permanents
30
Il est noter que cette loi de commande liant le couple la variable
q
i nest pas linaire.
Cette stratgie, surtout intressante dans les grandes puissances.
II.8.3.Deuxime stratgie : simplifier la loi couple- courant
Une seconde stratgie que lon rencontre frquemment consiste avoir la loi de commande
la plus simplifie possible entre le couple et les courants
d
i et
q
i , de faon obtenir la plus
grande similitude possible entre la commande en couple de la machine synchrone et une
commande en couple de machine courant continu. Ceci est traditionnellement ralis en
imposant
d
i gal zro.
En effet, le couple vaut alors :
q f e
i P C | = (II.51)
Il est noter quune telle commande en couple nutilise pas le couple rluctant du moteur.
Cette stratgie, surtout intressante pour les servomoteurs, relve dun point de vue
"automatique" (fonctions de transfert plus simples et optimisation plus aise de la
dynamique). La manire naturelle de contrler le couple consiste contrle les
courants
d
i et
q
i . Pour cela on associ la structure Machine-onduleur un reconstructeur dtat
afin de calculer
d
i et
q
i partir des courants de ligne de moteur. Nous pouvons ainsi rgler ces
deux variables et les asservir aux consignes ncessaires lobtention du couple dsir.
II.8.4.Stratgie de contrle du courant dans le cas de lalimentation par un onduleur de
tension
Les grandeurs de sortie des commandes analogiques ou numriques reprsentent les
tensions ou courants dsirs aux bornes de la machine. La technique de modulation de largeur
dimpulsion (M.L.I) permet de reconstituer ces grandeurs partir dune source frquence
fixe et tension fixe; en gnral une tension continue par lintermdiaire dun convertisseur.
Le rglage est effectu par les dures douverture et de fermeture des interrupteurs et par les
squences de fonctionnement.
La mthode de contrle des courants par M.L.I partir dune source de tension continue
constante consiste imposer aux bornes de la machine des crneaux de tension de manire
que le fondamental de la tension sois le plus proche de la rfrence de tension sinusodale.
La manipulation du nombre des impulsions formant chacune des alternances dune tension de
sortie dun onduleur M.L.I. prsente deux importants savoir :
Repousser vers des frquences plus levs les harmoniques de la tension ce qui facilite le
filtrage. Elle permet de faire varier la valeur du fondamental de la tension dsire.
Pour cela, deux techniques peuvent tre mises en oeuvre.
Contrle des courants par hystrsis
Contrle des courants par modulation de largeurs dimpulsions (MLI)
II.8.4.1.Contrle par hystrsis
Le principe de fonctionnement de la commande des courants par hystrsis est bas sur
une comparaison des courants dans les phases de la machine avec les courants de rfrence
Chapitre II Modlisation de la machine synchrone aimants permanents
31
fournis par le systme dautopilotage. A chaque instant, ltat de conduction des interrupteurs
de chaque bras dpend du signe du signal derreur correspondant.
Quand le courant instantan dans une phase scarte de sa rfrence dune valeur fixe par
lhystrsis du rgulateur, une commutation est impose aux interrupteurs du bras donduleur
correspondant de faon maintenir les courants lintrieur de leur bande.
Dans ce systme de contrle, la frquence de commutation des tensions est libre et
essentiellement variable. La mise en uvre de cette stratgie est relativement simple et ne
ncessite pas a priori une connaissance prcise des caractristiques de la machine. Il faut
nanmoins que la frquence de commutation des interrupteurs reste compatible avec les
possibilits de londuleur [27].
.
Fig.II.8 : Contrle des courants sinusodaux par hystrsis
II.8.4.2.Contrle des courants par modulation de largeurs dimpulsions (MLI)
On distingue les types suivants :
A) Modulation naturelle (sinus - triangle)
Dans la mthode de M.L.I. naturelle[28], les instants dchantillonnage ainsi que les
largeurs des impulsions de commande sont dtermins par la comparaison entre la tension
modulante sinusodale modulatricebasse frquence et une onde triangulaireporteuse
haute frquence.
La largeur dimpulsion est proportionnelle aux valeurs de la tension modulante aux instants
dchantillonnage. Ces instants tant dfinis de manire naturelle par la comparaison de deux
ondes, il nexiste pas de priode dchantillonnage bien dfinie, dou le qualificatif
dchantillonnage naturel, figure (II.9)
Logique de
commutation
Courant de rfrence (I
a
*
)
Courant rel (I
a
)
h : Bande hystrsis
I
a
*
I
a
I
b
*
I
b
I
c
*
I
c
I
I
I
I
a
(U
dc
/2)
-(U
dc
/2)
t
t
h
Chapitre II Modlisation de la machine synchrone aimants permanents
32
La modulation sinus-triangle prsente linconvnient de gnrer des impulsions
dissymtriques par rapport une priode de la porteuse. Ainsi les instants de commutation ne
peuvent tre exprims sous forme analytique simple, ce qui rend dlicate la mise en ouvre
dans les applications numriques, Ceci justifie lapparition de la MLI rgulire ou
chantillonne
Fig.II.9 : M.L.I chantillonnage naturel
B) Modulation rgulire symtrique (chantillonne)
Dans cette technique, lchantillonnage des tensions de rfrence se fait des instants
priodiquement espacs. Sur la figure II.10 nous prsentons ce principe
dchantillonnage[29].
Londe modulante est chantillonne chaque sommet positif de londe triangulaire. Cette
procdure produit une onde qui est une approximation de la rfrence sinusodale.
Limpulsion gnre est symtrique par rapport au centre de la priode et la mthode est
dnomme M.L.I rgulire symtrique. Les instants dchantillonnage, rgulirement espacs
ne dpendent de la mme valeur chantillonner [30]. Cette mthode est facilement ralisable
en temps rel.
Fig.II.10 : Echantillonnage rgulier symtrique
t
t
porteuse
modulatrice
U
c
/2
-U
c
/2
U
c
/2
-U
c
/2
Modulatrice
chantiollnne
Porteuse
triangulaire
Module
S
i
g
n
a
l
M
L
I
S
i
g
n
a
l
s
o
u
r
c
e
Chapitre II Modlisation de la machine synchrone aimants permanents
33
C) La SVM (Space Vector Modulation) [31]
Le nom de SVM est souvent confondu avec le nom de MLI vectorielle. Cependant la
SVM est base sur la reprsentation par des vecteurs de tensions Vs de londuleur comme
expliqu dans la figure (IV.2) et utilise la technique directe numrique (DDT-Direct degital
technique) sans comparaison thorique ou pratique entre modulante ou dent de scie.
Modlisation de la SVM sous SIMULINK
Aprs avoir rappel les diffrents principes de la fonctionnement de la MLI, nous allons
maintenant la modliser sous lenvironnement simulink du logiciel Matlab[32].
Fig.II.11 : Synoptique de la modlisation de la SVM sous Simulink
alpha
beta
N
N
X
Y
Z
T
X
Y
Z
alpha
beta
T
V
dc
T
1
T
b
T
m
T
a
T T
c
N
X
Y
Z
T
T
1
T
m
T
1
T
cm1
T
b
T
c
N T
cm3
T
cm2
T
cm1
PWM1
T
cm1
PWM2
T
cm1
PWM3
Uan
Ucn
Ubn
C
alpha
beta
Va
Vb
Vc
Clarke
Chapitre II Modlisation de la machine synchrone aimants permanents
34
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-500
-400
-300
-200
-100
0
100
200
300
400
500
Uan
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-500
-400
-300
-200
-100
0
100
200
300
400
500
Ubn
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-500
-400
-300
-200
-100
0
100
200
300
400
500
Ucn
Fig.II.12 : Signaux de commande de la SVM
Temps(s)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-400
-300
-200
-100
0
100
200
300
400
Temps(s)
V
r
f
1
,
V
r
f
2
,
V
r
f
3
(
v
o
l
t
)
Vrf1
Vrf2
Vrf3
Chapitre II Modlisation de la machine synchrone aimants permanents
35
II.9.Conclusion
Dans ce chapitre nous avons prsent des fondements sur la machine synchrone aimants
permanents (MSAP), ainsi que sa modlisation sous forme dquations mathmatiques. En se
basant sur un ensemble dhypothses simplificatrices, nous avons tali le modle du MSAP
dans le repre de Park afin de linariser le systme et faciliter son tude. Puis, on s'est
intress successivement la modlisation, au principe de fonctionnement et la commande
de londuleur de tension triphas.
Une simulation a t excute sur cette machine ainsi que sur londuleur de tension. Daprs
les rsultats de simulation obtenus, nous pouvons conclure que les reponses sont trs rapides
et stables.
Chapitre II Modlisation de la machine synchrone aimants permanents
36
Chapitre III
Commande vectorielle
de la MSAP
III.1 Introduction
Par le dcouplage entre la magntisation en flux et la production du couple
lectromagntique la machine courant continu est parfaitement adapte aux traitements
vitesse variable, mais la prsence du systme balai collecteur limite la puissance et la vitesse
maximale est prsente des difficults de maintenance et des interruptions de fonctionnement.
Pour toutes ces raisons, la machine synchrone aimants permanents tend se substituer la
machine courant continu. Cette volution est motive par d'indniables qualits de
robustesse et de fiabilit. Toutefois, un problme majeur se pose que le modle du moteur
synchrone aimants permanents correspond un systme multi variable et fortement coupl,
cest pour cette raison, une mthode de commande dite dorientation du flux, t propose
par Blaschke en 1972 [33], elle na cependant pas eu tout de suite un grand essor car les
rgulations, lpoque, reposaient sur des composant analogiques, limplantation de la
commande tait alors difficile. Avec lvnement des microcontrleurs et des dispositifs
permettant le traitement du signal, il est devenu possible de raliser une telle commande un
cot raisonnable. Cela a conduit une explosion des recherches et des applications relatives
la commande vectorielle de la machine synchrone aimants permanents, qui est lobjectif de
ce chapitre.
III.2 Principe de la commande vectorielle [34] [35]
Lide fondamentale de cette mthode de commande est de ramener le comportement de la
(MSAP) celui dune MCC. Cette mthode se base sur la transformation des variables
lectriques de la machine vers un rfrentiel qui tourne avec le vecteur du flux. Par
consquent, ceci permet de contrle le flux de la machine avec la
ds
I du courant statorique.
Tandis que, la composante
qs
I permet de contrler le couple lectromagntique correspond
au courant induit de la (MCC).
Si le courant
ds
I est dans la mme direction que le flux rotorique, le flux statorique
suivant laxe ) (d sajoute au flux des aimants, ce qui donne une augmentation au flux
dentrefer. Dautre part, si le courant
ds
I est ngatif, le flux statorique sera en opposition
celui du rotor, ce qui donne une diminution du flux dentrefer (dfluxage).
Le couple lectromagntique dvelopp par la (MSAP) peut scrire dans le rfrentiel de
Park ) , ( q d sous la forme suivante :
] ) [(
2
3
f qs qs ds qs ds e
I I I L L P C | + = (III.1)
La stratgie la plus souvent utilise consiste maintenir le flux de raction dinduit en
quadrature avec le flux rotorique, comme il est illustr la figure (III.1), ou les aimants sont
remplacs par un bobinage travers par un courant
f
I constant produisant un flux quivalent
celui des aimants.
qs ds
I I I = = 0 (III.2)
f f f
I L = | (III.3)
Chapitre III Commande vectorielle de la MSAP
37
Pour tout rgime, le flux et le courant reste en quadrature de sorte que lvolution du
couple suit celle de
qs
I donc :
Le couple lectromcanique devient :
f
P K |
2
3
= (III.4)
Comme le flux est constant, le couple est directement proportionnel
q
I :
qs e
KI C = (III.5)
q d
Fig.III.1 : commande par orientation du flux de la MSAP(
ds
I nul)
On remarque que lexpression du couple lectromagntique est la mme que celle
dune machine a courant continu, ou les courants :
f
I et
qs
I produisent respectivement les
flux rotorique et statorique sparment.
III.3 Commande vectorielle de la (MSAP)
Il existe deux mthodes distinctes pour contrler le courant :
- Lune ne ncessite pas la connaissance du modle lectrique de la machine et consiste
imposer directement les courants de phase dans une bande autour des courants de rfrence,
cest la mthode de contrle par des rgulateurs hystrsis.
- Lautre mthode exige la connaissance du modle de la machine et permet en
fonction de lerreur des courants de phase par rapport leurs rfrences de dterminer les
rfrences des tensions qui seront imposes aux bornes de la machine grce un onduleur de
tension command en modulation de largeur dimpulsion (M.L.I).
I
ds
=0
V
ds
I
f
V
f
I
qs
V
qs
Chapitre III Commande vectorielle de la MSAP
38
B
l
o
c
d
e
d
c
o
u
p
l
a
g
e
III.3.1 Commande vectorielle de la (MSAP) alimente en tension
La commande vectorielle porte en gnral sur des machines alimentes en tension et
rgules en courant sur les axes d etq . Cette topologie permet une meilleure dynamique dans
la commande du couple tout en vitant les inconvnients dune alimentation en courant.
La figure (III.2) reprsente le schma bloc dune rgulation de vitesse de la (MSAP)
alimente en vitesse et commande par orientation du flux
d.q
a.b.c
I
ds
I
ds
*
=0 Rgulateur d.q Onduleur
de courant MLI MSAP
I
ds
V
*
d
V
ds
*
I
qs
ref
Rgulateur Regulateur C
de vitesse de courant a.b.c
I
ds
*
I
qs
V
*
q
V
qs
*
Capteur de
position
d
dt
Fig.III.2 : Schma bloc dune rgulation de vitesse de la MSAP alimente en tension et
commande par lorientation du flux
Les principaux constituants dans la commande vectorielle sont la boucle de rgulation de
vitesse, celle des courants
ds
I et
qs
I et transformation de Park et Concordia.
La vitesse est rgule travers la boucle externe du bloc, la sortie de son rgulateur est
le couple lectromagntique de rfrence
-
e
C ou le courant de rfrence
-
qs
I . Il est limit
de manire tenir compte des caractristiques de londuleur et de la surcharge de la machine.
-
qs
I est compar la valeur
qs
I issue de la mesure des courants rels. Lerreur sollicite
lentre du rgulateur de rfrence
-
qs
V .
En parallle avec cette boucle interne, on trouve une boucle de rgulation de
ds
I . Le courant
ds
I de rfrence est maintenu zro.
Chapitre III Commande vectorielle de la MSAP
39
La sortie des rgulateurs de
ds
I et
qs
I donnent des tensions de rfrence
-
ds
V et
-
qs
V et par la
transformation de Park, on obtient les rfrences de tensions
- - -
cs bs as
V V V , , , qui sont les tension
de la commande de londuleur commande MLI.
Le systme dquation (II.24.29) introduit au chapitre prcdent prsent des non linarits
dues essentiellement la prsence des termes
qs ds
I I e e , et
qs ds
I I pour cette raison nous allons
ajouter des termes de dcouplage afin de rendre les axes d et q compltement
indpendantes, ce dcouplage permet surtout dcrire les quations de la machine et de la
partie rgulation dune manire simple et ainsi de calculer les coefficients des rgulateurs.
III.4.Dcouplage
Lalimentation en tension est obtenue en imposant les tensions de rfrence lentre de
la commande de londuleur. Ces tensions permettent de dfinir les rapports cycliques sur les
bras de londuleur de manire ce que les tensions dlivres par cet onduleur aux bornes du
stator de la machine soient les plus proches possibles des tensions de rfrence. Mais, il faut
dfinir des termes de compensation, car, dans les quations statoriques, il y a des termes de
couplage entre les axes d et q .
La compensation a pour but de dcoupler les axes d et q . Ce dcouplage permet dcrire
les quations de la machine et de la partie rgulation dune manire simple et ainsi de calculer
aisment les coefficients des rgulateurs [36].
Les quations statoriques comprennent, en effet, des termes qui font intervenir des
courants de lautre axe. Ces quations s'crivent:
+ + + =
+ =
) ( ) (
) (
f d d r q q s q
q q r d d s d
I L I s L R V
I L I s L R V
| e
e
(III.6)
La figure (III.3) reprsente le couple entre les axes d etq
r
L
q
I
q
V
d
1 I
d
R
s
+sL
d
f r
| e
V
q
1 I
q
R
s
+sL
q
r
L
d
I
d
Fig.III.3 : Description des couplages
Chapitre III Commande vectorielle de la MSAP
40
A partir des quations (III.6), il est possible de dfinir les termes de dcouplage qui sont
considrs, dans la suite, comme des perturbations vis--vis des rgulations. Pour ne pas
compliquer cette tude, nous considrons le cas de dcomposition des tensions Fig. (III.4).
Dans la premire quation, on spare la tension selon laxe d en deux parties :
Alors :
=
+ ' =
q q d
d d d
I L e
e V V
e
(III.7)
d s d
d
sL R V
I
+
=
'
1
(III.8)
La perturbation
d
e est compense par un terme identique de manire ce que la fonction
de transfert quivalente soit celle indique ci-dessus. On peut considrer de manire analogue
la deuxime quation et dfinir :
+ =
+ ' =
f d d q
q q q
I L e
e V V
e| e
(III.9)
De la mme faon, le terme
q
e est ajout de manire obtenir la fonction de transfert
suivante :
q S q
q
sL R V
I
+
=
'
1
(III.10)
I
dref
V
*
d
V
*
d
I
d
e
d
e
d
I
qref
V
*
q
V
*
q
I
q
e
q
e
q
Correction+dcouplage Modle
Fig.III.4 : Dcouplage par compensation.
Reg (PI)
d S
sL R +
1
Reg (PI)
q S
sL R +
1
Chapitre III Commande vectorielle de la MSAP
41
Les actions sur les axes et d et q sont donc dcouples.
I
dref
V
*
d
I
d
I
qref
V
*
q
Fig.III.5 : Commande dcouple
III.5.Rgulation
Lorsque le dcouplage entre laxe d et laxe q est ralis et que
d
I est maintenu nul, la
figure (II.4) de chapitre prcdent se rduit la figure (III.6). Cette dernire figure montre que
laxe q de la machine se rduit alors un schma quivalent celui dun moteur courant
continu excitation spar.
C
r
V
sq
I
qs
K
K
Fig.III.6 : schma bloc reprsentant la (MSAP) aprs lorientation du flux
Reg (PI)
Reg (PI)
s
1
I
q
d S
sL R +
1
q S
sL R +
1
Js f +
1
qs S
sL R +
1
Chapitre III Commande vectorielle de la MSAP
42
III.5.1.Calcul des rgulateurs de courant
Le schma du contrle des courants de la commande vectorielle se rduit deux boucles
distinctes comme lindique la figure suivante :
I
sd ref
Rgulation du flux
I
sq ref
Rgulation du couple
Fig.III.7 : commande des courants en deux boucles indpendantes
A partir des quations (III.6), (III.7) et (III.9), on peut crire les fonctions de transfert
suivantes :
1
1
1
) (
sd
sd
ds
s
d
V
I
s T
R
s F =
+
= (III.11)
1
1
1
) (
sq
sq
qs
s
q
V
I
s T
R
s F =
+
= (III.12)
Avec :
Reg d
Reg d
V
sd1
V
sq1
I
sd
I
sq
s T
R
ds
S
+ 1
1
s T
R
ds
S
+ 1
1
Chapitre III Commande vectorielle de la MSAP
43
s
ds
dS
R
L
T = (III.13)
s
qs
qS
R
L
T = (III.14)
Les rgulateurs ) (Re
d
g et ) (Re
q
g sont choisis comme tant des rgulateurs proportionnels
et intgraux, avec des fonctions de transfert de la forme suivante :
) 1 ( ) ( Re s
K
K
s
K
s g
id
pd
id
d
+ = (III.15)
) 1 ( ) ( Re s
K
K
s
K
s g
iq
pq iq
q
+ = (III.16)
Les fonctions de transfert en boucle ouverte sont donne par :
s T
R
s
K
K
s
K
FTBO
ds
s
id
pd
id
d
+
+ =
1
1
) 1 ( (III.17)
s T
R
s
K
K
s
K
FTBO
ds
s
id
pd
id
d
+
+ =
1
1
) 1 ( (III.18)
La dmarche suivre consiste procder la compensation de la constante de temps du
systme, en posant :
ds
id
pd
T
K
K
= (III.19)
qs
iq
pq
T
K
K
= (III.20)
Ce qui ramne les fonctions de transfert des courants en boucle ferme aux expressions
suivantes :
ref sd
sd
d
d
I
I
s
FTBF
=
+
=
t 1
1
(III.21)
ref sq
sq
q
q
I
I
s
FTBF
=
+
=
t 1
1
(III.22)
Avec :
Chapitre III Commande vectorielle de la MSAP
44
id
s
d
K
R
= t (III.23)
iq
s
q
K
R
= t (III.24)
Les boucles de courants correspondent donc un premier ordre, il suffit de fixer la
dynamique du systme travers un choix appropri de
d
t et
q
t . Celles-ci sont choisies de
manire ce que la constante de temps du systme en boucle ferme rgul soit infrieure la
constante de temps en boucle ouverte.
III.5.1. Calcul de rgulateur de vitesse
Le rgulateur de vitesse permet la dtermination du couple de rfrence afin de
maintenir la vitesse constante. En insrant un rgulateur PI dans la boucle de vitesse on
obtient le schma de la figure suivante :
Fig.III.8 : commande de la vitesse
La fonction de transfert du rgulateur de vitesse est donne par :
) (
p
i
p
i
p
K
K
s
s
K
s
K
K + = + (III.25)
La fonction de transfert de la vitesse en boucle ouverte est donne par (Cr=0)
f js K
K
s
s
K
FTBO
p
i
p
+
+ =
O
1
) ( (III.26)
En adoptant ainsi lexpression de la fonction de transfert de la vitesse en boucle ferme qui
donne par:
ref
1
Js + f
K
p
+
K
i
s
Ce
C
r
Chapitre III Commande vectorielle de la MSAP
45
i p
p
i
p
ref
K s K f Js
K
K
s K
s
s
FTBF
+ + +
+
=
O
O
=
O
) (
) (
) (
) (
2
(III.27)
La
O
FTBF possde une dynamique de 2
me
ordre, par identification la forme canonique
du 2
me
ordre lquation caractristique peut tre reprsente comme suit :
1 )
2
(
1
0
2
2
0
+ + =
O
s s FTBF
e
,
e
(III.28)
Avec, , reprsente le coefficient damortissement et
0
e reprsente la pulsation naturelle.
Par identification des quations (III.27) et (III.28) on obtient :
2
0
1
e
=
i
K
J
(III.29)
0
2
e
,
=
+
i
p
K
K f
(III.30)
On dduit
i
K et
p
K :
2
0
e J K
i
= (III.31)
f
K
K
i
p
=
0
2
e
,
(III.32)
III.6.Interprtation des rsultats
On remarque daprs la figure (III.9) que, lors du dmarrage vide de la (MSAP) pour un
chelon de consigne de 100rad/s, suivie dune application de charge de 5 N.m partir de
t=0.1s que :
Lallure de la vitesse suite parfaitement sa rfrence qui est atteinte trs rapidement
avec un temps de rponse acceptable. Leffet de la perturbation est rigoureusement
limin et que le couple lectromagntique se stabilise la valeur 5 N.m
La rponse des deux composantes du courant montre bien le dcouplage introduit par la
commande vectorielle de la (MSAP), ainsi le courant I
d
=0.
Le courant I
q
est limage du couple.
Dans lessai de la figue (III.10). On a invers la vitesse de rotation de la (MSAP) de la
valeur rfrentielle +100 rad/s la linstant t=0.1 s. les rsultats de simulation sont
satisfaisants et la robustesse de cette commande est garantie vis--vis de ce fonctionnement.
Chapitre III Commande vectorielle de la MSAP
46
Fig. III.9 : Rponses de la MSAP en charge avec (C
r
=5 N.m t=0.1 s)
Les courants id, iq [A] Courant ia [A]
Vitesse de rotation [rad/s] Couple lectromagntique [N.m]
Chapitre III Commande vectorielle de la MSAP
47
Fig. III.10 : Rponse de la MSAP pour une inversion de la vitesse t=0.1s
Vitesse de rotation [rad/s] Couple lectromagntique [N.m]
Les courants id, iq [A] Courant ia [A]
Chapitre III Commande vectorielle de la MSAP
48
III.7.Conclusion
Dans ce chapitre, nous avons prsent l'tude de la commande vectorielle applique
lassociation Onduleur deux niveaux MSAP. La simulation de cette dernire montre un trs
bon dcouplage se traduisant par une commande dcouple du flux statorique et du couple
lectromagntique. Ceci nous permet lapproche des performances analogiques celle du
moteur courant continu [37].
Pour notre cas, le modle est paramtres constants et ltat de la machine est suppos
entirement mesurable, par consquent la commande permet de raliser des boucles de
rgulations indpendantes pour le couple et le flux statorique. La commande non linaire est
directement affecte par le couple de charge et les variations paramtriques; ce qui ncessite
llaboration dune commande non linaire adaptative, dite "dynamique" avec une estimation
du couple rsistant afin de rendre la commande plus robuste.
Nous remarquons que quelque soient les plages de fonctionnement de la (MSAP), les
rponses avec cette commande propose sont plus rapides et plus performantes lors des
perturbations reprsentes par le couple de charge nominal et la variation paramtrique du
moteur [38].
Chapitre III Commande vectorielle de la MSAP
49
Chapitre IV
Commande directe du couple
de la MSAP
IV.1. Introduction
La commande directe du couple a t prsente en Allemagne par Hasse, Blaske, et
Leonhard pour des moteurs induction comme nouvelle approche pour la commande de
couple et de flux.
Le contrle directe du couple (DTC, ou DTFC) venu de la nomination anglosaxone
Direct torque (and Flux) control, et bas sur lorientation du flux statorique, a t dvelopp
par des chercheurs allemand et Japonais en 1971 pour lusage dans la commande de couple
des servo-moteurs de puissances leves. Rcemment, il est de plus en plus utilis dans
lindustrie en remplaant la stratgie de commande par le flux orient (FOC Field oriented
control.). La DTC est une technique de commande exploitant la possibilit dimposer un
couple et un flux aux machines courants alternatifs dune manire dcouple. Une fois
alimente par un onduleur de tension sans rgulateur de courant faite par une boucle de retour,
en atteignant lexcution semblable celui obtenue partir dune commande vectorielle.
Trois techniques de commandes ont t utilises pour mettre en application des commandes
de DTFC [39] [40]:
- commande par une table de commutation;
- commande automatique directe (DSC : Direct Self Control), lune des mthodes qui a
t introduite par Depenbrock en 1987 ;
- commande directe par modulation de vecteur (DVMC : Direct Victor Modulation
Control).
Ce type de commande repose sur la dtermination directe de la squence de commande
applique aux interrupteurs dun convertisseur statique. Ce choix est gnralement bas sur
lutilisation de rgulateurs hystrsis dont la fonction est de contrler ltat du systme,
savoir ici lamplitude du flux statorique et du couple lectromagntique. A lorigine, les
commandes DTC taient fortement bases sur le sens physique et une approche relativement
empirique de la variation des tats (couple, flux) sur un intervalle de temps trs court
(intervalle entre deux commutations).
Dans ce qui suit, on sintressera spcialement la commande directe du couple et du flux
(DTC ou DTFC). Pour tudier cette stratgie de commande, on commencera par prsenter et
mettre en uvre une structure de commande du MSAP par DTC.
VI.2.Principes gnraux de la commande directe du couple
Le principe de la commande directe de couple (DTC) doit choisir directement des vecteurs
de tension selon la diffrence entre la rfrence et la valeur relle du couple et du flux. Des
erreurs de couple et de flux sont compares dans des comparateurs hystrsis. Selon les
comparateurs un vecteur de tension est choisi parmi une table[41].
Aucune modulation de largeur dimpulsion nest ncessaire; au lieu de cela un des six
vecteurs de tension est appliqu pendant toute la priode dchantillon.
Les caractristiques gnrales dune commande directe de couple sont :
- La commande directe du couple et du flux, partir de la slection des vecteurs
optimaux de commutation de londuleur.
- La commande indirecte des intensits et tension du stator de la machine.
- Lobtention des flux et des courants statoriques proches de formes sinusodales.
Chapitre IV Commande directe du couple de la MSAP
50
- Une rponse dynamique de la machine trs rapide.
- Lexistence des oscillations de couple qui dpend, entre autres facteurs, de la largeur
des bandes des rgulateurs hystrsis.
- La frquence de commutation de londuleur dpend de lamplitude des bandes
dhystrsis.
La commande DTC dun moteur synchrone aimants permanents est base sur la
dtermination directe de la squence de commande applique aux interrupteurs dun onduleur
de tension. Ce choix est bas gnralement sur lutilisation de comparateurs hystrsis dont
la fonction est de contrler ltat du systme, savoir lamplitude du flux statorique et du
couple lectromagntique.
Fig.IV.1 : schma structurel dune commande DTC applique une (MSAP)
Cette technique possde gnralement dexcellentes caractristiques dynamiques qui
stendent des larges plages de fonctionnement couple/vitesse, et une plage de
fonctionnement sans capteur mcanique avec une frquence minimale de fonctionnement.
En plus :
- La stratgie de contrle par DTC est insensible, dans sa version de base, aux variations
des paramtres du rotor de la machine ;
- Lestimation de flux statorique ne dpend que de la rsistance du stator ;
- Le dcouplage entre les grandeurs de contrle tant naturellement assur par la
commande directe, et le fonctionnement flux variable naffect pas le rglage du
couple ;
- La mise en uvre des commandes de type DTC se dmarque sensiblement des
commandes flux orient classique; elles ne ncessitent gnralement pas de
transformation de coordonnes Park dans des axes tournants.
S
a
Bloc de
Rgulation
Bloc de Modulation
=
~
Bloc de traitement et destimation
[i
abc
]
s
S
b
S
c
MSAP
s
| A
e
C A
U
c
e
C
s
|
P
o
s
i
t
i
o
n
d
e
s
-
s
|
-
e
C
Chapitre IV Commande directe du couple de la MSAP
51
IV.3.Fonctionnement et squences dun onduleur de tension triphas
A partir de la stratgie de base de la DTC propose par Takahashi, plusieurs stratgies se
sont dveloppes, profitant des degrs de libert offerts par la structure de londuleur de
tension triphas. Plusieurs tables de vrit dfinissant les tats des interrupteurs de londuleur,
sont prsentes sous diverses [42] [43] formes. On sintresse seulement la table de vrit
originale de Takahashi et celle sans squence nulles.
Un onduleur de tension triphas permet datteindre sept positions distinctes dans le plan
de phase, correspondantes aux huit squences de la tension de sortie de londuleur, (voir
figure (IV.2) On peut crire :
(
+ + = + = =
3
4
0
3
2
0 0 0
3
2
t t
| o
j
cn
j
bn an s s s sn
e V e V V jv v V V (IV.1)
T
cn bn an
V V V ] [
0 0 0
est le vecteur de tensions de sortie de londuleur qui dpend de ltat des
interrupteurs (voir figure II.7) .Cet tat est reprsent, thoriquement, par 3 grandeurs
boolennes de commande S
i
(i=1,2,3), o S
i
est ltat de linterrupteur.
Fig.IV.2 : Squence de fonctionnement dun onduleur, et partition du plan
complexe en 6 secteurs angulaires
Avec :
) 0 , 0 , 0 ( ) , , (
3 2 1 0
= S S S V et ). 0 , 0 , 0 ( ) , , (
3 2 1 7
= S S S V
1
2
3
4
6
5
V
1
(100)
V
3
(010)
V
4
(011)
V
5
(001) V
6
(101)
V
0,7
(000)
V
2
(110)
Chapitre IV Commande directe du couple de la MSAP
52
IV.4.Stratgie de commande directe de couple et de flux
Takahashi a propos une stratgie de commande ce couple et de flux (DTC) qui est base
sur lalgorithme suivant :
- le domaine temporel est divis en des priodes de dure
e
T rduites ); 50 ( s T
e
<=
- pour chaque coup dhorloge, on mesure les courants de ligne et les tensions par phase
de la (MSAP) ;
- On reconstitue les composantes du vecteurs de flux statorique, on utilisant les
quations (IV.10-13) ;
- On estime le couple lectromagntique de la(MSAP), en utilisant lestimation du flux
statorique et la mesure des courants de lignes, en utilisant lquation (IV-14) ;
- On dtermine la squence de fonctionnement de londuleur pour commander le flux et
le couple suivant une logique quon va prsenter dans ce qui suit.
IV.4.1.Contrle du vecteur de flux statorique
On se place dans le repre fixe ) , ( | o li au stator de la machine. Le flux statorique de la
(MSAP) est obtenu partir de lquation suivante :
dt
d
i r V
s
s s s
|
+ = (IV.2)
On obtient :
dt i r V
t
s s s s s
}
+ ~
0
0
) ( | | (IV.3)
dt V
t
s s s
}
+ ~
0
0
| | (IV.4)
Pendant une priode dchantillonnage, le vecteur de tension appliqu la (MSAP) reste
constant, on peut crire alors :
e s s
T V k k + ~ + ) ( ) 1 ( | | (IV.5)
O encore :
e s s
T V ~ A| (IV.6)
Avec :
- ) (k
s
| cest le vecteur de flux statorique au pas dchantillonnage actuel ;
- ) 1 ( + k
s
| cest le vecteur du flux statorique au pas dchantillonnage suivant ;
-
s
| A cest la variation du vecteur flux statorique ( )); ( ) 1 ( k k
s s
| | +
-
e
T cest la priode dchantillonnage.
Chapitre IV Commande directe du couple de la MSAP
53
Dans le cas dune machine synchrone aimants permanents, le flux statorique changera
mme si on applique des vecteurs de tension nuls, puisque laimant tourne avec le rotor. Par
consquent, les vecteurs de tension nuls ne sont pas utiliss pour contrler le flux statorique.
En dautres termes,
s
| devrait tre toujours en mouvement par rapport au flux rotorique. Pour
une priode dchantillonnage constante,
s
| A est proportionnel au vecteur de tension appliqu
au stator de la (MSAP). La figure (IV.) montre lvolution du vecteur de flux statorique dans
le plan ) , ( | o .
Fig.IV.3 : Evolution du vecteur de flux statorique dans le plan ) , ( | o
Donc pour augmenter le flux, statorique, il suffit dappliquer un vecteur de tension qui lui
est colinaire et dans sa direction, et vice versa.
IV.4.2.Contrle du couple lectromagntique
Le couple lectromagntique est proportionnel au produit vectoriel entre les vecteurs des
flux statorique et rotorique selon lexpression suivante.
) sin( ) (
' '
u | | | |
r s r s e
k k C = = (IV.7)
Tels que
q
L
P
k =
Avec :
-
s
| : cest le vecteur de flux statorique ;
-
'
r
| : cest le vecteur de flux rotorique ramen au stator ;
- o : cest langle entre les vecteurs des flux statorique et rotorique.
) 1 ( + k
s
|
) (k
s
|
s
| A
Sens de rotation
Chapitre IV Commande directe du couple de la MSAP
54
Le couple dpend donc de lamplitude des deux vecteurs
s
| et
'
r
| et de leur position
relative. Si lon parvient contrler parfaitement le flux
s
| ( partir de
s
V ) en module et en
position, on peut donc contrler lamplitude de
s
| et donc le couple lectromagntique de
faon dcouple.
IV.5.Slection du vecteur de tension
Le choix de vecteur de tension statorique
s
V dpend de la variation souhaite pour le
module de flux statorique
s
| et du sens de rotation de
s
| et galement de lvolution souhaite
pour le couple.
En se plaant dans le repre statorique ), , ( | o on peut dlimiter lespace
s
| en le
dcomposant en six zones appeles secteurs , dtermines partir des composantes de flux
suivant les axes ) (o et ) (| .Laxe ) (o est choisi confondu avec laxe de la phase ) (a de
lenroulement triphas ) , , ( c b a (voir figureIV.4).
Lorsque le flux
s
| se trouve dans une zone ) 6 ,... 1 ( = i i , le contrle du flux et du couple peut
tre assur en slectionnant lun des huit vecteurs tension suivants[44][45] [46].
- Si
1 + i
V est slectionn alors
s
| croit et
e
C crot ;
- Si
1 i
V est slectionn alors
s
| croit et
e
C dcrot ;
- Si
2 + i
V est slectionn alors
s
| dcrot et
e
C crot ;
- Si
2 i
V est slectionn alors
s
| dcrot et
e
C dcrot ;
- Si
0
V ou
7
V sont slectionns, alors la relation du flux
s
| est arrte, do une
dcroissance du couple alors que le module de flux
s
| reste inchang.
Le niveau defficacit des vecteurs de tension appliqus dpend galement de la position
du vecteur de flux statorique dans la zonei .
En effet, au dbut de la zone, les vecteur
1 + i
V et
2 + i
V sont perpendiculaires
s
| do une
volution rapide du couple mais une volution lente de lamplitude du flux, alors qu la fin
de la zone, lvolution est inverse. Alors aux vecteurs
1 + i
V et
2 + i
V , il correspond une volution
lente du couple et rapide de lamplitude de
s
| , au dbut de la zone, alors qu la fin de zone
cest le contraire. Quelque soit le sens dvolution du couple ou du flux, dans la zonei , les
deux vecteurs
i
V et
3 + i
V ne sont jamais utiliss. En effet, ceux-ci gnrent la composante de
flux la plus forte (volution trs rapide de
s
| ) mais leffet sur le couple lui, dpend de la
position de
s
| dans la zone, avec un effet nul au milieu de la zone.
Le vecteur de tension statorique
s
V la sortie de londuleur appliquer au moteur, est dduit
des carts de couple et de flux estims par rapport leur rfrence, ainsi que de la position du
vecteur
s
| .
Un estimateur de module de
s
| et de sa position ainsi quun estimateur de couple est donc
ncessaires, pour une commande DTC.
Chapitre IV Commande directe du couple de la MSAP
55
Fig.IV.4 : partition du plan complexe en six secteurs angulaires S
i=16
IV.6.Estimation du flux et du couple
On considre le systme daxes ) , ( | o li au stator de la (MSAP).Les quations des
tensions statoriques sont exprimes par [47].
+ =
+ =
| | |
o o o
|
|
s s s s
s s s s
i r v
i r v
(IV.8)
Le calcul du flux statoriques se fait selon les expressions suivantes :
| o
| | |
s s s
j
+ = (IV.9)
1
2 3
4
6 5
V
1
(100)
V
3
(010)
V
4
(011)
V
5
(001) V6 (101)
V
2
(110)
V2 (AF,AC) V3 (DF,AC)
V6 (AF,DC) V5 (DF,DC)
Secteur I
V0,7(000)
V
6
[101] signifi :
1: interrupteur en haut du 1
er
bras ferm
0: interrupteur en haut du 2
eme
bras ouvert
1: interrupteur en haut du 3
eme
bras ferm
AF : Augmenter le flux DF : diminuer le flux
AC : augmenter le couple DC : diminuer le couple
Chapitre IV Commande directe du couple de la MSAP
56
=
=
}
}
t
s s s s
t
s s s s
dt i r v
dt i r v
0
0
) (
) (
| | |
o o o
|
|
(IV.10)
On obtient les tensions
o s
v et
| s
v partir des commandes ) , , (
3 2 1
S S S et de la mesure de la
tension
c
U , en appliquant la transforme de Concordia :
| o s s s
jv v V + = (IV.11)
+ =
+ =
) (
3
2
)) (
2
1
(
3
2
3 2
3 2 1
S S U v
S S S U v
c s
c s
|
o
(IV.12)
Le module du flux et sa phase sont obtenus par calcul comme suit :
= Z
+ =
o
|
| o
|
|
|
| | |
s
s
s
s s s
arctg
2 2
(IV.13)
Une fois les deux composantes de flux sont obtenues, le couple lectromagntique peut tre
estim daprs sa formule rappele ci-dessous :
)
(
2
3
o | | o
| |
s s s s e
i i P C = (IV.14)
Lestimation du flux statorique et du couple lectromagntique ncessite la connaissance
pralable des composantes du courant et celles de la tension statoriques. Elle est retenue dans
le cas dune commande non linaire applique la (MSAP) en particulier et surtout la
commande par DTC.
Dans ce travail, le modle de la (MSAP) utilis est exprim dans le repre ) , ( q d , pour cela
il nous faut un passage biphas dq o| .
Les deux composantes du flux statorique sont donne par (II.21, 22), pour sen servir dans la
commande, on effectue la transformation inverse o| dq .
IV.6.1.Correction de flux en utilisant un comparateur hystrsis deux niveaux
Ce correcteur est simple dans son application. Son but est de maintenir lextrmit du vecteur
de flux
s
| dans une couronne circulaire comme le montre la figure (IV.5).
Chapitre IV Commande directe du couple de la MSAP
57
Fig.IV.5 : a) Slection des tensions V
i
correspondant au contrle de lamplitude de flux
statorique
s
| ,
b) Comparateur hystrsis utilis pour contrler le module de vecteur de
flux statorique.
On peut crire ainsi :
si
|
c | > A
s
alors 1 =
|
K
si
|
c | s A s
s
0 et 0 > A dt d | alors 0 =
|
K
si
|
c | s A s
s
0 et 0 < A dt d | alors 1 =
|
K
si
|
c | < A
s
alors 0 =
|
K
En effet, si on introduit lcart
s
| A , entre le flux de rfrence
-
s
| et le flux estim
s
|
dans
un comparateur hystrsis deux niveaux(voir figre.IV.5.b), celui-ci gnre sa sortie la
valeur 1 + =
|
K pour augmenter lcart le flux 0 =
|
K pour le rduire ; cela permet de plus
dobtenir une trs bonne performance dynamique du flux. Ainsi, seul les vecteurs
1 + i
V ou
2 + i
V
peuvent tre slectionns pour faire valuer le vecteur de flux statorique
s
| .
Par contre, ce correcteur ne permet pas linversion du sens de rotation du vecteur de flux
s
| .
Ainsi, pour aller en marche arrire, on impose un croisement dun bras du convertisseur.
IV.6.2.Correction du couple en utilisant un comparateur hystrsis trois niveaux
Un comparateur hystrsis trois niveaux (-1, 0,1), permet de contrler le moteur dans
les deux sens de rotation, en gnrant soit un couple positif, ou un couple ngatif. Ce
comparateur est modlis par lalgorithme (IV.14), tels que
c
K reprsente ltat de sortie du
comparateur et
Ce
c la limite de la bande dhystrsis (voir figure.IV.6)
5
6
2
1
3
4
V
1
V
2
V
3
V
2
V
3
V
4
V
3
V
4
V
5
V
4
V
5
V
6
V
5
V
6
V
1
V
6
V
1 V
2
s
| A
s
| A
|
K
+1
0
|
c
*
s
|
s s s
| | |
*
= A
|
c
(IV.15)
a) b)
Chapitre IV Commande directe du couple de la MSAP
58
Fig.IV.6 : comparateur hystrsis trois niveaux utiliss pour le rglage du couple
lectromagntique.
On peut crire alors :
si
Ce e
C c > A alors 1 =
c
K
si
Ce e
C c s A s 0 et 0 > A dt C d
e
alors 0 =
c
K
si
Ce e
C c s A s 0 et 0 < A dt C d
e
alors 1 =
c
K
si
Ce e
C c < A alors 1 =
c
K
si 0 < A s
e Ce
C c et 0 > A dt C d
e
alors 0 =
c
K
si 0 < A s
e Ce
C c et 0 < A dt C d
e
alors 1 =
c
K
En introduisant lcart
e
C A entre le couple lectromagntique de rfrence
-
e
C et celui
estim
e
C
dans un comparateur hystrsis trois niveaux (voir figure.IV.6), celui-ci gnre
la valeur 1 =
c
K pour augmenter le couple, 1 =
c
K pour le rduire et 0 =
c
K pour le
maintenir constant dans une bande
e C
c autour de sa rfrence. Ce choix daugmenter le
nombre de niveaux est propos afin de minimiser la frquence de commutation moyenne des
interrupteurs, car la dynamique du couple est gnralement plus rapide que celle du flux.
IV.7.Elaboration des tables de commutation
IV.7.1.Elaboration de table de commutation avec squences nulles
On labore la table de vrit en se basant sur les erreurs du flux et du couple
s
| A et
e
C A , et
selon la position du vecteur de flux statorique ) 6 ,..., 1 ( =
i
S .Le partage du plan complexe en
six secteurs angulaires selon la figure (IV.4) permet de dterminer, pour chaque secteur
donn, la squence de commande des interrupteurs de londuleur qui correspond aux
diffrents tats des grandeurs de contrle
s
| A et
e
C A suivant la logique du comportement de
flux et de couple vis--vis de lapplication dun vecteur de tension statorique.
+1
c
K
e e e
C C C
*
= A
0
Ce
c
Ce
c
-1
0
(IV.16)
Chapitre IV Commande directe du couple de la MSAP
59
Tab.IV.1. Table gnralise des vecteurs de tension dune commutation par DTC.
En se basant sur ce tableau gnralis, on peut tablir le tableau classique des squences
ci-dessous rsumant la MLI vectorielle propose par Takahashi pour contrler le flux
statorique et le couple lectromagntique de la (MSAP).
Tab.IV.2. Table de la DTC classique dfinissant les squences dun onduleur.
Les squences nulles
0
V et
7
V , sont indpendantes de ltat du flux, elles sont lies uniquement
lcart
e
C A .Ces squences sont appliques lorsquon souhaite maintenir le couple dans sa
bande :
Ce e Ce
C c c s A s .
IV.7.2.Elaboration de la table de commutation sans squences nulles
Dans ce cas, on nexploite que les squences actives. Cette stratgie a lavantage de la
simplicit et permet dviter le caractre alatoire li au sens de variation du couple lorsquon
applique une squence nulle en fonctionnement gnrateur. Alors, les squences qui
correspondent
e
C A nulle sont ignores (voir tableau.IV.2). La table suivante illustre cette
modification.
Tab.IV.3. Table de commutation sans squence nulles.
K
0 0 1 1
S
1
001 010 101 110
S
2
101 011 100 110
S
3
100 001 110 011
S
4
110 101 010 001
S
5
010 100 011 101
S
6
011 110 001 100
K
c
0 1 0 1
1
0
-1 V
6
V
1
V
2
V
3
V
4
V
5
1 V
3
V
4
V
5
V
6
V
1
V
2
0 V
0
V
7
V
0
V
7
V
0
V
7
-1 V
5
V
6
V
1
V
2
V
3
V
4
0 V
7
V
0
V
7
V
0
V
7
V
0
1 V
2
V
3
V
4
V
5
V
6
V
1
K
K
c
S
1
S
2
S
3
S
4
S
5
S
6
Augmentation Diminution
s
|
e
C
V
i-1 ,
V
i
et V
i+1
V
i-2 ,
V
i+ 2
et V
i+3
V
i+1 ,
et V
i+ 2
V
i-1
et V
i-2
Chapitre IV Commande directe du couple de la MSAP
60
Dans ce cas, si
s
| A et
e
C A sont gales 1(erreurs positives) alors, on exige une
augmentation du (flux/couple) et si elles sont gales 0 (erreurs ngatives) alors on applique
une diminution du (flux/couple).
Lutilisation des squences nulles des tensions permet de diminuer la frquence de
commutation moyenne du variateur, en particulier, lorsque la vitesse de rotation reste faible.
IV.8.Structure gnrale de la DTC applique au MSAP
La structure dune commande par DTC applique la (MSAP) est reprsente sur la figure
(IV.6). On utilise le tableau classique des squences proposes par Takahashi. Le choix du
vecteur
s
V est effectu chaque priode dchantillonnage
e
T .
Fig.IV.6 : Schma de la commande gnrale du contrle direct de couple
dune (MSAP)
MSAP
*
e
C
Alimentation
continue U
c
Onduleur
de tension
1
0
-1 V
6
V
1
V
2
V
3
V
4
V
5
1 V
3
V
4
V
5
V
6
V
1
V
2
0 V
0
V
7
V
0
V
7
V
0
V
7
-1 V
5
V
6
V
1
V
2
V
3
V
4
K
K
c
S
1
S
2
S
3
S
4
S
5
S
6
0 V
7
V
0
V
7
V
0
V
7
V
0
1 V
2
V
3
V
4
V
5
V
6
V
1
S
a
S
b
S
c
S
a
S
b
S
c
Transformation
de Concordia
( )dt i r V
t
s s s s
}
=
0
|
Transformationde
concordia/Park
( )
sd sq sq sd e
i i P C | |
2
3
=
3 2
4 1
5
6
i
c
(t) i
b
(t) i
c
(t)
U
c
o s
i
| s
i
o s
v
| s
v
s
|
Z
o
|
s
|
|
s
o s
i
| s
i
s
| A
s
|
*
s
|
e
C A
c
K
|
K
Chapitre IV Commande directe du couple de la MSAP
61
IV.9.Rsultats de la simulation et interprtation
Afin de mettre en vidence les performances et la robustesse de la commande directe du
couple la vitesse de rotation et donc le systme dentranent global, on a simul le systme
sous lenvironnement MALAB/SIMULINK en trois cas, le dmarrage avec et sans
lintroduction dun couple de charge et avec linversion du sens de rotation.
IV.9.1.Dmarrage vide (en l'absence de la charge)
La figure.IV.9 prsente un dmarrage vide, on constate que la vitesse rpond sans
dpassement dans ce rgime avec un temps de rponse trs court car la machine soumise
une inertie faible, ainsi atteinte sa rfrence exactement de 100 rad/s.
Au dmarrage le couple lectromcanique atteint sa valeur maximale et se stabilise une
valeur pratiquement nulle en rgime tabli. Le courant statorique une forme sinusodale.
.
Chapitre IV Commande directe du couple de la MSAP
62
Fig. IV.9 : Rsultats de simulation pour un dmarrage vide
Vitesse de rotation [rad/s] Couple lectromagntique [N.m]
Module de flux [wb] Flux bta [wb]
Flux alpha [wb]
Courants is_abc [A] Tension Va [V]
Chapitre IV Commande directe du couple de la MSAP
63
a)Teste de robustesse pour linversion du sens de rotation de la machine
Pour avrer lavantage de la robustesse de la commande vis--vis des variations de
rfrence de la vitesse, on introduit dans la figure IV.10 un changement de consigne de
vitesse environ 100rad/s -100rad/s linstant t=0.1s aprs un dmarrage vide.
Nous remarquons aprs linversion de la vitesse que la poursuite de la vitesse seffectue
sans dpassement, ainsi la trajectoire du flux statorique est pratiquement circulaire et le
module de flux atteint sa rfrence de contrle sans perturbation.
Cette figure montre aussi lallure rectangulaire de la tension qui inhrente au dcoupage de la
tension dalimentation de londuleur.
Chapitre IV Commande directe du couple de la MSAP
64
Fig.IV.10 : Rsultats de simulation pour inversion de la vitesse
(+100 rad/s -100rad/s)
Vitesse de rotation [rad/s] Couple lectromagntique [N.m]
Tension Va [V]
Module de flux [wb]
Flux alpha [wb]
flux bta [wb]
Courants is_abc [A]
Chapitre IV Commande directe du couple de la MSAP
65
b) Test de robustesse pour une variation de la charge
La figure.VI.11 prsente le rsultat de simulation lors de lapplication dun chelon de
consigne de 5N.m linstant t=0.1s. A cet effet , nous nous apercevons que le couple suit
parfaitement la valeur de consigne avec influence ngligeable sur la vitesse qui se rtablie
Rapidement sa rfrence qui montre que la DTC prsente une haute performance dynamique
sans dpassement au dmarrage.
On remarque aussi que le flux nest pas affect par la variation de la charge, ainsi que le
courant de phase une forme sinusodale est rpond avec succs ce type de test.
Chapitre IV Commande directe du couple de la MSAP
66
Fig. IV.11 : Rsultats de simulation pour application de couple de charge
Vitesse de rotation [rad/s] Couple lectromagntique [N.m]
Module de flux [wb] Courants is_abc [A]
Flux alpha [wb]
Flux bta [wb] Tension Va [V]
Chapitre IV Commande directe du couple de la MSAP
67
IV.10.Conclusion
Nous avons prsent, travers cette partie, une mthode pour une commande en couple
sans capteur mcanique. Cette approche repose sur lamlioration dune estimation simple des
composantes en , du flux statorique par lintroduction dun algorithme de compensation en
ligne inhrente toute mesure.
Aprs une analyse des diffrents effets de cette commande, nous avons montr quil est
possible de synthtiser une commande de vitesse base sur une structure minimale utilisant
seulement un modle simplifi du processus commander et en combinant de manire
judicieuse des actions proportionnelle et intgrale au niveau des algorithmes destimation du
flux et de couple.
Devant linsuffisance des performances dynamiques du rgulateur PI utilis dans le rglage
de la vitesse, vis vis des perturbations non modlisables, nous avons fait appel ces
estimateurs dtat pour reconstruire les variables dtats savoir : la position, la vitesse de
rotation et la grandeur de perturbation qui est dans notre cas le couple rsistant Cr. Toutefois,
les rsultats exprimentaux de la commande directe du couple montrent les avantages
suivants :
- La robustesse par rapport la variation de paramtre de la machine et de lalimentation.
- Limposition directe de lamplitude des ondulations du couple et du flux.
- Ladaptation par nature labsence de capteur mcanique connect larbre moteur
Chapitre IV Commande directe du couple de la MSAP
68
Conclusion gnrale et perspectives
Le travail prsent dans ce mmoire a permis une contribution lanalyse et la synthse
des lois de commande robuste appliques au moteur synchrone aimants permanents.
Devant laugmentation significative de la puissance massique attendue pour les futurs
quipements, ainsi que les enjeux de llectrification intensive dans le domaine de
l'entranement vitesse variable, laxe technologique qui consiste augmenter la performance
dynamique de systme embarqu a fait lobjectif de choisir les actionneurs lectromcaniques
susceptibles de rpondre aux contraintes extensives rsultantes sur lincertitude de la vitesse.
Le premier chapitre s'est focalis plus prcisment sur le choix des machines synchrones
aimants permanents qui apparat comme une solution technologique pertinente notamment en
terme maniabilit vis--vis de rseau frquence variable.
La dernire partie de ce chapitre a t axe sur un tat de lart de cette technologie dans le
contexte dune adaptation des machines oprationnelles au domaine de la vitesse variable.
Ainsi, il apparat clairement que le concept de la machine aimants permanents offre une
certaine marge de manuvre pour la recherche dune solution optimale lorsque lon combine
les possibilits en terme de matriaux, de structure et de stratgie dalimentation.
Dans le deuxime chapitre, nous avons trait la problmatique de la modlisation de la
machine synchrone aimants permanents en se basant sur les quations lectriques et
mcaniques rgissant le comportement dynamique de la MSAP. Ensuite, on a pu laborer un
modle dtat qui a t simul en utilisant MATLAB-SIMULINK. Les rsultats de simulation
sont satisfaisants.
Dans le troisime chapitre, nous avons mis en uvre une structure de commande simplifie
robuste pour la commande vectorielle dune machine synchrone aimants permanents de
faible puissance. Aprs une analyse des diffrents effets de cette commande, nous avons
montr quil est possible de synthtiser une commande de vitesse base sur une structure
minimale en utilisant seulement un modle simplifi du processus commander et en
combinant de manire judicieuse des actions proportionnelle et intgrale au niveau des
algorithmes de rgulation PI de la vitesse et des courants.
Les rsultats de simulation obtenus dans ce cas montrent que le composante du flux porte par
laxe d sannule, ce qui signifie que le dcouplage a t ralis et que le comportement de la
MSAP est rendu similaire celui du moteur courant continu excitation spare
Dans le quatrime chapitre, devant linsuffisance des performances dynamiques du
rgulateur PI utilis dans le rglage de la vitesse vis vis les perturbations non modlisables,
nous avons d'une part dvelopp une structure de commande sans capteur de vitesse par un
contrle direct de couple (DTC) des machines synchrones aimants permanents munies des
algorithmes qui sont peu sensibles aux variations des paramtres de la machine et ne
ncessitent pas de capteurs mcaniques qui sont fragiles et trs coteux et dautre part, les
estimateurs de couple et de flux sont lis directement au modle mathmatique de la machine
o le seul paramtre intervenant est la rsistance statorique. En outre, la MLI est remplace
dans cette commande par une simple table de commutation. Ainsi, nous avons pu tudier,
travers des rsultats de simulation, la robustesse de cette mthode vis vis des perturbations.
A partir de ces travaux raliss, quelques perspectives pouvant amliorer les performances
dynamiques des associations "MSAP-ONDULEUR" peuvent tre suggres:
Conclusion gnrale et perspectives
69
- Utilisation des rgulateurs de mode glissant ou la rgulation par la logique floue.
- Utilisation des onduleurs multi niveaux et des convertisseurs matriciels afin
daugmenter le nombre des vecteurs de tensions utiles, ce qui minimisera les fluctuations du
couple lectromagntique.
- Utilisation des commandes des microprocesseurs "nouvelle gnration", tant donn que
les machines synchrones aimants permanents s'adaptent bien la commande numrique.
Conclusion gnrale et perspectives
70
Annexe
ANNEXE
Paramtre du moteur synchrone aimants permanent tudi [78]
Paramtre Valeur
Frquence 50Hz
Puissance 800Wat
Tension dalimentation 220/380V
Nombre de paires de ples 2
Rsistance statorique 0.56
Inductance longitudinale Ld 4.5mH
Inductance transversale Lq 4.5mH
Flux daimant 0.074wb
Cfficient de frottement 0.00039Nms/rad
Inertie 0.00208kgm
2
Annexe
Rfrences bibliographiques
Rfrences bibliographiques.
[1] G. Grellet, G.Cerc " actionneur Electriques, Principes, Modles, commande" Collection
Electrotechnique, Edition Eyrolles, 1997
[2] M. Kadjoudj "Contribution la Commande dune MSAP ", Thse De Doctorat Dtat
Universit De Batna, 2003.
[3] J .Chenadec " les machines synchrones- technologies et diffrents modes d'alimentations
des machines synchrones"
[4] A, F Jawad "Etude du problme inverse en lectromagntisme en vue de la localisation
des dfauts de dsaimantation dans les actionneurs aimants permanents ". Thse de Doctorat
lUniversit de technologie de Belfort-Montbeliard, 05 dcembre 2008.
[5] S. Grehant. Introduction aux moteurs flux transverse. PhD thesis, Institut National
Polytechnique de Grenoble, 2003
[6] F. Leprince, Ringuet "Aimants permanents. Matriaux et applications"Techniques de
l'ingnieur, (D187).
[7] J-M. Vinassa "Contribution la conception dun actionneur aimants permanents et
commutation lectronique destin lassistance lectrique de direction pour automobile"
Thse de lInstitut National Polytechnique de Toulouse, 1994.
[8] A. Fonseca "Comparaison de machines aimants permanents pour la traction de vhicules
lectriques et hybrides" PhD thesis, Institut National Polytechnique de Grenoble, 2000.
[9] S. Leichter "Etude des machines excites par aimants ferrites et alimentes par
convertisseur statique fonctionnant en commutation naturelle: recherche de structures
magntiques optimales et analyse du comportement" Thse de lInstitut National
Polytechnique de Toulouse, 1980.
[10] M. Labraga "Contribution la conception d'actionneurs aimants permanents et
commutation lectronique fonctionnant basse vitesse" Thse de lInstitut National
Polytechnique de Toulouse, 1992.
[11]Yasser.ALHASSOUN "Etude et mise en oeuvre de machines aimantation induite
haute vitesse" PhD thesis, Institut National Polytechnique de Toulouse, 2005.
[12] P. Pwgasan, R. Knshnan "Modeling of Permanent Magnet Motor Drives". IEEE
transactions on industrial electronics, vol. 35, n 4, November 1988.
[13] L. Dalila "Commande non linaire adaptative dune machine synchrone aimants
permanents" Thse demagistre en lectrotechnique universit de Batna, 2009.
[14] R .Abdessemed, M. Kadjouj "Modlisation des machines lectriques". Presse deluniversit de
Batna 1997.
[15] A. Saiad "Commande structure variable d'un systme d'entranement lectrique"
Mmoire de Magister, universit de Batna, 2002.
[16] F. benchabane " Commande en position et en vitesse par mode de glissement dun
moteur synchrone triphas aimants permanents avec minimisation du chattring" Mmoire de
magister, universit de Biskra, 2005
[17] G. Octavian Cimuca" Systme inertiel de stockage dnergie associe des gnrateurs
oliens " cole nationale suprieure darts et mtiers centre de Lille 2005
[18], C. Bouchereb "Contrle direct du couple des machines synchrones".mmoire de
magister en lectrotechnique, universit de Batna, 2005.
[19] H. Ziane "commande vectorielle des machines synchrones aimants permanents avec
compensation de temps mort de londuleur, commande sans capteur mcanique" mmoire de
magister de universit de Bejaia 2001.
Rfrences bibliographiques
[20] L. Lasse "Analysis of torque and speed ripple producing non-idealities of frequency
converters in electric drives". Thesis for the degree of Doctor of Science (Technology) to be
presented with due permission for public examination and criticism in the Auditorium 1382 at
Lappeenranta University of Technology, Lappeenranta university, Finland on the 5th of
November 2004.
[21] G. Lacroux "Actionneurs lectriques pour la robotique et les asservissements" Lavoisier,
1995
[22] A. Ameur "Commande sans capteur de vitesse par DTC dune machine synchrone
aimants dot dun observateur dordre complet mode glissant".mmoire de magister en
lectrotechnique universit de Batna, 2003.
[23] S. Belkacem" Etude comparative des performances statique et dynamique dun Contrle
de dcouplage et de DTC dun moteur induction aliment par un convertisseur statique".
mmoire de magister en lectrotechnique, universit de Batna, 2005.
[24] N. Babak "Commande vectorielle sans capteur mcanique des machines synchrones
aimants: mthodes, convergence, robustesse, identification "en ligne" des paramtres" Thse
de Doctorat lUniversit de Thran, Iran, 2001.
[25] F. Labrique, G. Seguier et R. Baisiere "Les convertisseurs de llectronique de puissance
volume 4 : La conversion continu-alternatif", Lavoisier, 1995.
[26] P.S. Bastiani "Stratgies de commande minimisant les pertes dun ensemble
convertisseur machine alternative : Application la traction lectrique " Thse de doctorat
de linstitut national des sciences appliques de Lyon, France, Fvrier 2001.
[27] H. Tamrabet "Robustesse dun contrle vectoriel de structure minimale dune machine
asynchrone" mmoire de magistre en lectrotechnique universit de Batna, 2006.
[28] A. Schnung, H. Stemmler Static frequency changers with sub-harmonic control in
conjunction with reversible variable speed AC drives, Brown Boveri Review, pp. 555-577,
Sep. 1964.
[29] S.R. Bowes, B.M. Bird, "Novel Approach to the Analysis and Synthesis of Modulation
Processes in Power Converters", Proceedings of IEE, Vol.122, N.5, 1975, pp.507-513
[30] S. Hiti, D. Boroyevich, Small signal modelling of three phase PWM modulatorsPower
Electronics Specialists Conference (PESC 96), Baveno Italy, 23-27 June 1996, pp. 550-555
[31] S. Laurentiu Capitaneanu " Optimisation de la fonction MLI dun onduleur de tension
deux-niveaux" laboratoire dlectrotechnique industrielle LENSEEIHT de TOULOUSE
[32] Z. G. Wang, J. X. J in " SVPWM Techniques and applications in PMSM machine
control" journal of electronic science and technology of china, vol.6, pp.191-192 ,N2,June
2008
[33] J. Caron, J. Hautier "Modlisation et Commande de la machine Asynchrone", Technique
et documentation, Paris, 1995
[34] T. Rekioua " Contribution la modlisation et la commande vectorielle des MSAP"
Thse de Doctorat, Institut National Polytechnique, Lorraine 1991.
[35] A. Benbrahim"Commande prdictive gnralise dune machine synchrone aimants
permanents mmoire de magister en lectrotechnique universit de Batna, 2009.
[36] M. Boussak, R. Pilioua-Sendo "Commande vectorielle sans capteur mcanique avec
lestimation de la position initiale des servomoteurs synchrones aimants". 16
me
journes
Tunisiennes dElectrotechnique et dautomatique, Hammamet Tunisie, 8 et 9 Novembre
1996.
[37] FADLI .OUAHIBA "Modlisation et commande non linaire de lassociation : MSAP-
onduleur de tension trois niveaux "mmoire de magister, universit de Batna, 2006
[38] B. Belabbes "commande structures variables par linarisation exacte de lcart dune
MSAP" universit de djilali liabes, 2008
Rfrences bibliographiques
[39] Y.A. Chapuis, "commande directe du couple dune machine asynchrone par le contrle
direct de son flux statorique" Thse de doctorat de lINP de Grenoble, France 1996.
[40] I. Takahashi, T.Noguchi, "a new quick-reponse and high efficiency control strategy of an
induction machine" IEEE Trans.Ind.Applicat., Vol.IA-22, pp.820-827, Oct.1986
[41] M. hadef "contrle direct du couple des machines synchrones aimants permanents avec
et sans capteur mcanique" mmoire de magister universit de bjaia 2003
[42] C. Carlos "Modlisation Contrle Vectoriel et DTC, Commande des Moteurs
Asynchrone 1 " Edition Hermes Science Europe, 2000
[43] B. Mokhtari "Implantation de la DTFC par des Techniques de lIntelligence Artificielle
Neuronale et Floue : Application la Machine Asynchrone Alimente par des Onduleurs de
Tension deux et trois Niveaux", Mmoire de Magister, Universit de Batna, 2004.
[44] J. Luukko "Direct Torque Control of Permanent Magnet Synchronous Machine-Analysis
and Implementation", Doctorate Thesis, Helsinki University of Technology, Finland, 2000.
[45] M.F. Rahman, L. Zhong "Analysis of direct torque control in permanent magnet
synchronous motor derives" IEEE Trans. on Power Electronics , Vol.12 N3,pp528-536,1997
[46] M.R. Zolghadri " contrle direct du couple des actionneurs synchrones " Thse doctorat
INP, Grondable 1997.
[47] A. Elbacha, M.T. Lamchich, M. Cherkaoui "contrle direct de couple dune machine
asynchrone systme de rgulation de vitesse avec anti-emballement". http://www.univ-
tlemcen.dz/manifest/CISTEMA2003.
[48] A. Chaker, S.Hassaine "Commande en vitesse de la MSAP dote dun observateur
detat de LUENBERGER "Laboratoire dautomatique et dinformatique industrielle,ESI de
Poitiers,France,2007
Rfrences bibliographiques
You might also like
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsFrom EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsRating: 5 out of 5 stars5/5 (1)
- Série N°1-TD de Transfert Thermique PDFDocument2 pagesSérie N°1-TD de Transfert Thermique PDFKoukou Amkoukou90% (50)
- Chapitre 2 Les Circuits Hydrauliques de Transmission de PuissanceDocument30 pagesChapitre 2 Les Circuits Hydrauliques de Transmission de PuissanceKoukou Amkoukou100% (2)
- Le Demarrage Des Moteur AsynchronesDocument9 pagesLe Demarrage Des Moteur Asynchronesaminethebest80% (5)
- Modélisation Des Machines Électriques en Régime TransitoireDocument21 pagesModélisation Des Machines Électriques en Régime TransitoireABDELNASSER100% (1)
- AC DC AC AC Electronique de Puissance L2 S1Document52 pagesAC DC AC AC Electronique de Puissance L2 S1Leila Fakhfakh100% (1)
- Commande Par Vgpi - Gada - Cipe 2016Document6 pagesCommande Par Vgpi - Gada - Cipe 2016Otantik Tsiory PatrickNo ratings yet
- MAS - Le Moteur AsynchroneDocument19 pagesMAS - Le Moteur AsynchronePatrick_mx100% (12)
- ELM ElectromécaniqueDocument50 pagesELM Electromécaniquedjimy_dz100% (1)
- MMOAMPA - 16 - Installattion Et Entretien Des Machines À Ca PDFDocument167 pagesMMOAMPA - 16 - Installattion Et Entretien Des Machines À Ca PDFMohammed Moha ChtiouiNo ratings yet
- Cours EP ÉtudiantDocument107 pagesCours EP ÉtudiantMohamed Ben Fredj100% (1)
- Annalyse Et Commande Des Systemes LineaiDocument84 pagesAnnalyse Et Commande Des Systemes LineaiFifi JojoNo ratings yet
- Inj Messadi MounaDocument143 pagesInj Messadi Mounaمراد علمدارNo ratings yet
- Modelisation CMD MSAPDocument35 pagesModelisation CMD MSAPKoukou AmkoukouNo ratings yet
- Msap Ens MultonDocument62 pagesMsap Ens MultonkerkniNo ratings yet
- TD Moteurs AsynchronesDocument10 pagesTD Moteurs AsynchronesRadoineMarzaukNo ratings yet
- 5-Calcul D'un Câble SouterrainDocument29 pages5-Calcul D'un Câble Souterraindandy0% (1)
- QCM Machine Synch Async PDFDocument15 pagesQCM Machine Synch Async PDFMohamed Hmamouch100% (1)
- Etude D'une ÉolienneDocument24 pagesEtude D'une Éoliennediablos300100% (5)
- Mémoire TAG Version Finale Chapitre 13Document60 pagesMémoire TAG Version Finale Chapitre 13DIATTANo ratings yet
- Reb 4478Document131 pagesReb 4478Sidahmed LarbaouiNo ratings yet
- Electro Avancee AbDocument76 pagesElectro Avancee AbmoipopNo ratings yet
- Chapitre III MSDocument68 pagesChapitre III MShawewiااNo ratings yet
- Commande MASDocument90 pagesCommande MASSofiane DouidaNo ratings yet
- Simulation Des Réseaux Électriques Avec SimulinkDocument7 pagesSimulation Des Réseaux Électriques Avec SimulinkYoussouf DjerioueNo ratings yet
- Chapit 1Document27 pagesChapit 1ben boubakerNo ratings yet
- Comande MCCDocument59 pagesComande MCCsanadNo ratings yet
- Réglage Par Mode de Glissement D'un Moteur A SynchroneDocument78 pagesRéglage Par Mode de Glissement D'un Moteur A Synchroneboufakri abdelmounaimNo ratings yet
- Etude Et Simulation Des Differentes Estimateurs Et ObservateDocument100 pagesEtude Et Simulation Des Differentes Estimateurs Et ObservateYacine AspireNo ratings yet
- Chapitre-I Modélisation de La MASDocument14 pagesChapitre-I Modélisation de La MASSaliha ZmNo ratings yet
- CT 207Document25 pagesCT 207Youssef JakeNo ratings yet
- Ms ELN Boussaid+Morad PDFDocument128 pagesMs ELN Boussaid+Morad PDFmechtoub sofianeNo ratings yet
- Commande Par Mode Glissant Et Flou D'une Génératrice Asynchrone À Double Alimentation (GADA) Application À L'énergie ÉolienneDocument122 pagesCommande Par Mode Glissant Et Flou D'une Génératrice Asynchrone À Double Alimentation (GADA) Application À L'énergie Éoliennehamza mesaiNo ratings yet
- Commande D'une Machine Asynchrone À Double Stator Par Régulateur GlissantDocument91 pagesCommande D'une Machine Asynchrone À Double Stator Par Régulateur GlissantBenaouadj Mahdi100% (1)
- Modelisation - Machine Synchrone1Document39 pagesModelisation - Machine Synchrone1JihadJiji0% (1)
- BrahmiDocument5 pagesBrahmiabfstbmsodNo ratings yet
- Rapport MCCDocument9 pagesRapport MCCMahfoud ElallaouiNo ratings yet
- Résumé Cours Tech Commande ElecDocument16 pagesRésumé Cours Tech Commande ElecHassan AbushwarebNo ratings yet
- TP 1 CMDocument4 pagesTP 1 CMEmna SaadiNo ratings yet
- Controle Direct de CoupleDocument159 pagesControle Direct de CoupleMarya Ait IshaNo ratings yet
- Introduction GénéraleDocument51 pagesIntroduction GénéraleSoufiane Hjije100% (2)
- Statisme Pour Les Générateurs HydroélectriquesDocument16 pagesStatisme Pour Les Générateurs HydroélectriquesOualid LamraouiNo ratings yet
- Commandes Hybrides de La Machine Asynchr PDFDocument175 pagesCommandes Hybrides de La Machine Asynchr PDFELmokhtar HamrouniNo ratings yet
- Etude Et Optimisation Du Transfert DenergieDocument83 pagesEtude Et Optimisation Du Transfert DenergieTarek BouallegNo ratings yet
- CH1.Semi Conducteur en Electronique de PuissanceDocument32 pagesCH1.Semi Conducteur en Electronique de PuissanceAlicia Lys50% (4)
- Chap1 - Introduction À La Commande Des Machines ElectriquesDocument11 pagesChap1 - Introduction À La Commande Des Machines ElectriquesRap DzNo ratings yet
- Partie PratiqueDocument10 pagesPartie PratiqueHàjàr KcimNo ratings yet
- TP1 Commande en Boucle Ouverte de Lassociation Moteur Asynchrone-OnduleurDocument8 pagesTP1 Commande en Boucle Ouverte de Lassociation Moteur Asynchrone-OnduleurMohamed AbidNo ratings yet
- Corrige - Chap3 - Exo3 OnduleurDocument2 pagesCorrige - Chap3 - Exo3 OnduleurMarwan SkNo ratings yet
- Commande D'un Convertisseur Matriciel Triphasé Par Réseaux de Neurones - Entraînement D'une Machine AsynchroneDocument132 pagesCommande D'un Convertisseur Matriciel Triphasé Par Réseaux de Neurones - Entraînement D'une Machine AsynchroneBENALI YOUCEF Mohammed100% (1)
- Impact Des Perturbations Électriques Sur La Stabilité D'un Réseau ÉlectriqueDocument52 pagesImpact Des Perturbations Électriques Sur La Stabilité D'un Réseau ÉlectriqueChristopherNo ratings yet
- Power FlowDocument16 pagesPower FlowbigmaindNo ratings yet
- Type de Bobinage MCCDocument29 pagesType de Bobinage MCCidriss habibiNo ratings yet
- HDR Ouari KamelDocument48 pagesHDR Ouari KameljyNo ratings yet
- Commande DTC Cinq Niveaux À 24 Secteurs D'un Moteur Asynchrone Par Méthodes IntelligentesDocument9 pagesCommande DTC Cinq Niveaux À 24 Secteurs D'un Moteur Asynchrone Par Méthodes IntelligentesbenbouhenniNo ratings yet
- Commande Par Mode GlissatDocument7 pagesCommande Par Mode GlissatAh Vall HemeyineNo ratings yet
- These ECL2008-26 Abu-TabakDocument207 pagesThese ECL2008-26 Abu-TabakNabil Saïdani100% (1)
- 8-3 - Modelisation Des MCCDocument13 pages8-3 - Modelisation Des MCCfia9aNo ratings yet
- 2 Année MASTER: Chargée de TPDocument3 pages2 Année MASTER: Chargée de TPoussama dzNo ratings yet
- Le Moteur À Courant ContinuDocument24 pagesLe Moteur À Courant ContinuMental CalculNo ratings yet
- Chapitre 03 Régime Transitoire Dans Les Machines A Courant ContinuDocument10 pagesChapitre 03 Régime Transitoire Dans Les Machines A Courant ContinuYanis TariktNo ratings yet
- Commande Vectorielle Sans Capteur Mécanique de La Machine SyDocument96 pagesCommande Vectorielle Sans Capteur Mécanique de La Machine SyAbdou Juventus100% (1)
- 8 Martani-Mouhamed-Elhadi PDFDocument71 pages8 Martani-Mouhamed-Elhadi PDFkolechi dz100% (1)
- Production ElectriciteDocument22 pagesProduction Electriciteملاك روحيNo ratings yet
- Nouveau Document Microsoft WordDocument22 pagesNouveau Document Microsoft WordHamza HamzaNo ratings yet
- Chapitre-4 Machines Électriques SpécialesDocument6 pagesChapitre-4 Machines Électriques SpécialesAysar ChNo ratings yet
- Simulatin D'un OnduleurDocument10 pagesSimulatin D'un OnduleurokbaboutebbaNo ratings yet
- OlienneDocument64 pagesOliennenagazi moezNo ratings yet
- Variation de Vitesse MCCDocument39 pagesVariation de Vitesse MCCMahdi El Marrakchi100% (1)
- 3 ActionneursDocument55 pages3 ActionneursTOUFIKNo ratings yet
- 20141218111129-MERABET Memoire PDFDocument135 pages20141218111129-MERABET Memoire PDFfares noureddineNo ratings yet
- Ziraoui Salah EddineDocument86 pagesZiraoui Salah Eddineعثمان عثمانNo ratings yet
- Guide de La Protection FRDocument107 pagesGuide de La Protection FRKarim ZaraiNo ratings yet
- Memoire Akkouchi Kamel PDFDocument76 pagesMemoire Akkouchi Kamel PDFabd elhamid mabroukNo ratings yet
- Elect m1 2011Document132 pagesElect m1 2011Sidahmed LarbaouiNo ratings yet
- Elecpred PDFDocument16 pagesElecpred PDFKoukou AmkoukouNo ratings yet
- EL20 A05 TD v2 PDFDocument17 pagesEL20 A05 TD v2 PDFKoukou AmkoukouNo ratings yet
- Cour3d ElectroniquedepuissanceparL.M.ouazenDocument15 pagesCour3d ElectroniquedepuissanceparL.M.ouazenعرعار يوسفNo ratings yet
- Chapitre 3 Redressement Monophasé CommandéDocument10 pagesChapitre 3 Redressement Monophasé CommandéRédâ Amine100% (1)
- Corrige Chap4 Exo4 PDFDocument3 pagesCorrige Chap4 Exo4 PDFKoukou AmkoukouNo ratings yet
- Cour 1 Redress Ment Mono PhaseDocument16 pagesCour 1 Redress Ment Mono PhaseAbdallah BelabbesNo ratings yet
- Electronique PDFDocument29 pagesElectronique PDFKoukou AmkoukouNo ratings yet
- BAC GM Redressement CommandeDocument15 pagesBAC GM Redressement Commandesafe812002No ratings yet
- 04synthese RedressementDocument2 pages04synthese RedressementdxsszszNo ratings yet
- Corexf h00 PDFDocument6 pagesCorexf h00 PDFKoukou AmkoukouNo ratings yet
- EPchap5epu PDFDocument16 pagesEPchap5epu PDFKoukou AmkoukouNo ratings yet
- Cour 1 Redress Ment Mono PhaseDocument16 pagesCour 1 Redress Ment Mono PhaseAbdallah BelabbesNo ratings yet
- Corexf h00Document6 pagesCorexf h00Koukou AmkoukouNo ratings yet
- Cour7 LesconvertisseursmatricielleDocument38 pagesCour7 LesconvertisseursmatricielleKoukou AmkoukouNo ratings yet
- Abaque de PuschlowskiDocument1 pageAbaque de PuschlowskiNabil SaidaniNo ratings yet
- RedresseursDocument21 pagesRedresseursNADERRR0% (1)
- Rap Projet Ms DSPDocument54 pagesRap Projet Ms DSPKoukou AmkoukouNo ratings yet
- These Depernet 1995Document223 pagesThese Depernet 1995Koukou AmkoukouNo ratings yet
- Simulation de La Commande Vectorielle Par Régulateurs À Mode Glissant D'une Chaine Éolienne À Base D'une Machine Asynchrone À Double Alimentation1Document117 pagesSimulation de La Commande Vectorielle Par Régulateurs À Mode Glissant D'une Chaine Éolienne À Base D'une Machine Asynchrone À Double Alimentation1Koukou Amkoukou100% (7)
- Simulation de La Commande Vectorielle Par Régulateurs À Mode Glissant D'une Chaine Éolienne À Base D'une Machine Asynchrone À Double Alimentation1Document117 pagesSimulation de La Commande Vectorielle Par Régulateurs À Mode Glissant D'une Chaine Éolienne À Base D'une Machine Asynchrone À Double Alimentation1Koukou Amkoukou100% (7)
- Donnee Exos Chaleur MasseDocument9 pagesDonnee Exos Chaleur MasseMohamud LhafNo ratings yet
- RPNE000028DDocument44 pagesRPNE000028DKoukou AmkoukouNo ratings yet
- Les Installations IndustriellesDocument12 pagesLes Installations IndustriellesAmin HammoudaNo ratings yet
- Physique-STI-Génie ElectrotechniqueDocument13 pagesPhysique-STI-Génie ElectrotechniqueLetudiant.frNo ratings yet
- Démontage Remontage - Maintenance MoteurDocument5 pagesDémontage Remontage - Maintenance MoteurBabacarDiago0% (1)
- Diagnostic 2Document9 pagesDiagnostic 2Youssef Amhine100% (1)
- Chapitre 3 Les Procedes de DemarrageDocument23 pagesChapitre 3 Les Procedes de Demarragedallagi mohamedNo ratings yet
- Moteur Asynchrone TriphaséDocument3 pagesMoteur Asynchrone Triphasécharkihassan33% (3)
- TP GradiateurDocument8 pagesTP GradiateurSeVILLA8Dz100% (1)
- Ms ELN Bousmaha+Tahir PDFDocument136 pagesMs ELN Bousmaha+Tahir PDFBayari ArNo ratings yet
- 07E OualiAmirouche TahriMustapha PDFDocument57 pages07E OualiAmirouche TahriMustapha PDFsoheib marinovNo ratings yet
- E - Les Moteurs Electriques (Rev3b)Document67 pagesE - Les Moteurs Electriques (Rev3b)feriel aissiNo ratings yet
- Symbole Electrique PDFDocument11 pagesSymbole Electrique PDFAlex SkanderNo ratings yet
- Modelisation D Une Centrale Hybride Eolienne A Vitesse Variable Solaire Connectee A Un Bus Continu Commun en Environnement Matlab SimulinkDocument14 pagesModelisation D Une Centrale Hybride Eolienne A Vitesse Variable Solaire Connectee A Un Bus Continu Commun en Environnement Matlab SimulinkSaliha ZmNo ratings yet
- Onep Rapport de Stage 27-04-2010aDocument50 pagesOnep Rapport de Stage 27-04-2010aZakaria Wahib100% (4)
- TypesMachinesElectriquesDocument23 pagesTypesMachinesElectriquesRaph AelNo ratings yet
- Étude D Une Perceuse Sur Colonne S2 Utilisation de L Énergie Électrique S2-3 Force Motrice - Le Moteur Asynchrone TriphaséDocument25 pagesÉtude D Une Perceuse Sur Colonne S2 Utilisation de L Énergie Électrique S2-3 Force Motrice - Le Moteur Asynchrone TriphaséAziz AkbNo ratings yet
- Présentation Du TD3 & Du Corrigé 14-05-20Document16 pagesPrésentation Du TD3 & Du Corrigé 14-05-20hassna ait aliNo ratings yet
- Cours Modele Cmde MAS PDFDocument22 pagesCours Modele Cmde MAS PDFabdelgoui rymNo ratings yet
- TD1 - MasDocument4 pagesTD1 - MasOussama Starex100% (1)
- Devoir 3 Modele 4 Si 2 Bac SM B Semestre 1Document18 pagesDevoir 3 Modele 4 Si 2 Bac SM B Semestre 1lemsouguer100% (1)
- 6 Parcours de Formation Des Enseignants STI2D Au 05-01-11Document103 pages6 Parcours de Formation Des Enseignants STI2D Au 05-01-11HoussemTunisinoNo ratings yet