You might also like
- Basic Anatomy of 3D Printers DLP JDocument10 pagesBasic Anatomy of 3D Printers DLP JJuniel BarriosNo ratings yet
- Documenting Robot Project WorkDocument7 pagesDocumenting Robot Project WorkDebdeep BanerjeeNo ratings yet
- PPMP IT PROCUREMENT PROJECTDocument4 pagesPPMP IT PROCUREMENT PROJECTJo Fel GarciaNo ratings yet
- VB.NET Question Bank Covers Core ConceptsDocument16 pagesVB.NET Question Bank Covers Core Conceptsnitin jaulkarNo ratings yet
- Home - Schematics - Products - Tutorials - Datasheets - Robotics - Download - Link ExchangeDocument2 pagesHome - Schematics - Products - Tutorials - Datasheets - Robotics - Download - Link ExchangeJoshua HernandezNo ratings yet
- 3d PrinterDocument12 pages3d PrinterManishNo ratings yet
- Types of 3D Printers FDMDocument2 pagesTypes of 3D Printers FDMMiguel De Castro MiguelNo ratings yet
- 3D PrinterDocument16 pages3D PrinterK.Ramesh Mechanical MIET INSTITUTIONSNo ratings yet
- Signed ClusteRICE Guidelines IRRDocument30 pagesSigned ClusteRICE Guidelines IRRren whahahhaNo ratings yet
- Computer Systems Servicing NC II - Network CablingDocument33 pagesComputer Systems Servicing NC II - Network CablingNea CadVelNo ratings yet
- Office Productivity Tools 2Document10 pagesOffice Productivity Tools 2sirhc_gabemid02No ratings yet
- Robotics Workshop Proposal For LKCTDocument6 pagesRobotics Workshop Proposal For LKCTMohsin SheikhNo ratings yet
- TLE 10 Lesson 1Document111 pagesTLE 10 Lesson 1Lindsay Kirstyn Tabaniag100% (1)
- PC Assembly, Troubleshooting & NetworkingDocument97 pagesPC Assembly, Troubleshooting & Networkingapi-2698962191% (11)
- Module 2 PDFDocument32 pagesModule 2 PDFalbinoNo ratings yet
- Robotics 2nd QuarterDocument30 pagesRobotics 2nd QuarterMyca Elaine Lualhati Jalla-DomingoNo ratings yet
- Comparing PECs of Students and IT PractitionersDocument1 pageComparing PECs of Students and IT PractitionersPangangan NHS100% (1)
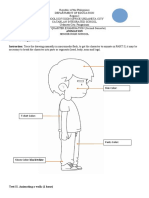
- ANIMATION WHLP WK 2 Quarter 2 April 25 28 2022Document4 pagesANIMATION WHLP WK 2 Quarter 2 April 25 28 2022Viloria, Clark Justine T.No ratings yet
- Programming NC IVDocument73 pagesProgramming NC IVdjNo ratings yet
- MS EXCEL MULTIPLE CHOICE QUIZDocument25 pagesMS EXCEL MULTIPLE CHOICE QUIZgurusodhiiNo ratings yet
- Self Assessment Guide (PRG)Document2 pagesSelf Assessment Guide (PRG)Mikaela Mariñas MoletaNo ratings yet
- CBLM - Assembling - Disassembling Consumer Electronic Products and SystemsDocument186 pagesCBLM - Assembling - Disassembling Consumer Electronic Products and SystemssorcererpcNo ratings yet
- Lesson Plan Use Case DiagramDocument10 pagesLesson Plan Use Case DiagramSwiInoNo ratings yet
- Intelligent Cad/Cam System For Programming of CNC Machine ToolsDocument12 pagesIntelligent Cad/Cam System For Programming of CNC Machine Toolseko siswonoNo ratings yet
- Ict Illustration 10 q1 w5 6 Mod4Document29 pagesIct Illustration 10 q1 w5 6 Mod4Chase OkNo ratings yet
- Laguna State Polytechnic University: Republic of The Philippines Province of LagunaDocument16 pagesLaguna State Polytechnic University: Republic of The Philippines Province of Lagunabash bashNo ratings yet
- Computer Programming CGDocument20 pagesComputer Programming CGRonald Allan BalderosaNo ratings yet
- BSC Computing Level 3 Sem 2 Object Oriented Programming in C++ Assignment 2 Project Total Marks: 45 Submission/Demo Week: 13 WeekDocument2 pagesBSC Computing Level 3 Sem 2 Object Oriented Programming in C++ Assignment 2 Project Total Marks: 45 Submission/Demo Week: 13 WeekSanjog Pradhan EditsNo ratings yet
- Diagnostic Test TLE-CSS 10 SY 2022-2023 Table of SpecificationDocument10 pagesDiagnostic Test TLE-CSS 10 SY 2022-2023 Table of SpecificationMARGIE SEGUINo ratings yet
- Css Coc3 CBLMDocument96 pagesCss Coc3 CBLMInfoTutorial 2020No ratings yet
- Voice Controlled Bluetooth Robot Using Andriod SmartphoneDocument12 pagesVoice Controlled Bluetooth Robot Using Andriod SmartphoneADITHYA KNo ratings yet
- Computerprog 1 Q 1Document4 pagesComputerprog 1 Q 1Merry anne AndusNo ratings yet
- Animation NC II CGDocument18 pagesAnimation NC II CGErick EsplanaNo ratings yet
- DLL - Robotics 2 Robot PartsDocument4 pagesDLL - Robotics 2 Robot Partsjojo grandeNo ratings yet
- 1st Quarter Exam Animation 2nd SemDocument2 pages1st Quarter Exam Animation 2nd Semgabriel r. benitezNo ratings yet
- Numerical Methods SyllabusDocument3 pagesNumerical Methods SyllabusRodrigoNoaNo ratings yet
- Smainhs - JDVP Accomplishment ReportDocument13 pagesSmainhs - JDVP Accomplishment ReportHannah Regine Diane CoglingNo ratings yet
- Internet of Things (Iot) Based Smart CityDocument52 pagesInternet of Things (Iot) Based Smart CityKaTe STellaNo ratings yet
- OOPS in C++ PDFDocument7 pagesOOPS in C++ PDFVyomNo ratings yet
- Basic Electronic and RoboticsDocument138 pagesBasic Electronic and RoboticsSoy SalamanderNo ratings yet
- 2D Animation CORE 2Document19 pages2D Animation CORE 2Haidhar Husin100% (1)
- Cpe 422 - Microprocessors SystemsDocument6 pagesCpe 422 - Microprocessors SystemsJames CENo ratings yet
- Malacampa National High School CSS Action PlanDocument3 pagesMalacampa National High School CSS Action PlanRoda DoctorNo ratings yet
- Robotics PPT (Introduction)Document22 pagesRobotics PPT (Introduction)Jose Arturo Giles HernandezNo ratings yet
- (Core 1) TRB Css Ncii Finals Sy2018Document2 pages(Core 1) TRB Css Ncii Finals Sy2018Oliver BC SanchezNo ratings yet
- J/SHS: Activity Sheet Quarter 2 - LO1Document11 pagesJ/SHS: Activity Sheet Quarter 2 - LO1Boiztupidoh Oof D'WestNo ratings yet
- Flowcharting On CHSDocument10 pagesFlowcharting On CHSMacly UmaliNo ratings yet
- Justinmind Prototyper TutorialsDocument50 pagesJustinmind Prototyper Tutorialsnadia_22am5230100% (1)
- RoboticsDocument18 pagesRoboticslakshmigsr6610100% (1)
- CSS Grade 10 Quarter 2 LAS 1Document15 pagesCSS Grade 10 Quarter 2 LAS 1JohnRayFloresArquisolaNo ratings yet
- Q2 Animation10 Module2Document27 pagesQ2 Animation10 Module2Rochella M.No ratings yet
- Animation NC II CG (Word Version)Document24 pagesAnimation NC II CG (Word Version)Marc RiomalosNo ratings yet
- Practicing Career Professionalism CBLMDocument73 pagesPracticing Career Professionalism CBLMArvincent Geronimo OlatanNo ratings yet
- Detailed Lesson Plan in CssDocument13 pagesDetailed Lesson Plan in CssGherson Escobal100% (1)
- TVL ICT IllustrationNCII Q1Module2Document12 pagesTVL ICT IllustrationNCII Q1Module2Kimberly Trocio KimNo ratings yet
- Computer Hardware and Networking Exam QuestionsDocument2 pagesComputer Hardware and Networking Exam QuestionsLeah Pinili BlancoNo ratings yet
- Syllabus - RobaticsDocument2 pagesSyllabus - RobaticsSatheesh KumarNo ratings yet
- RoboticsDocument2 pagesRoboticsvasanthsatNo ratings yet
- Robotics Fundamentals, Drives, Sensors, Kinematics & ProgrammingDocument1 pageRobotics Fundamentals, Drives, Sensors, Kinematics & ProgrammingmohanmzcetNo ratings yet
- Train PackageDocument1 pageTrain PackageMonica CarrollNo ratings yet
- Train PackageDocument1 pageTrain PackageMonica CarrollNo ratings yet
- PipeDocument25 pagesPipecbler0% (1)
- Floortech CatalogueDocument12 pagesFloortech CatalogueMonica CarrollNo ratings yet
- Power ToolsDocument8 pagesPower ToolsMonica CarrollNo ratings yet
- SEZ Rules July 2010Document161 pagesSEZ Rules July 2010pr_abhatNo ratings yet
- Catalogue For Power ToolDocument2 pagesCatalogue For Power ToolMonica CarrollNo ratings yet
- Indiawood 2014 BrochureDocument12 pagesIndiawood 2014 BrochureMonica CarrollNo ratings yet
- JCB Attachment - The Complete SolutionDocument16 pagesJCB Attachment - The Complete SolutionGanta AravindNo ratings yet
- HMTP BrochureDocument8 pagesHMTP BrochureMonica CarrollNo ratings yet
- Power ToolsDocument8 pagesPower ToolsMonica CarrollNo ratings yet
- Wps PQR PDFDocument13 pagesWps PQR PDFErick HoganNo ratings yet
- CWS RenewalDocument2 pagesCWS RenewalMonica CarrollNo ratings yet
- Brouchure For Power ToolsDocument4 pagesBrouchure For Power ToolsMonica CarrollNo ratings yet
- Brochure For Power ToolsDocument8 pagesBrochure For Power ToolsMonica CarrollNo ratings yet
- Introduction To Ultrasonic TestingDocument46 pagesIntroduction To Ultrasonic TestingTobeFrank100% (8)
- Brouchure For Power ToolsDocument4 pagesBrouchure For Power ToolsMonica CarrollNo ratings yet
- Catalogue For Power ToolDocument2 pagesCatalogue For Power ToolMonica CarrollNo ratings yet
- UT Question and AnswersDocument11 pagesUT Question and Answersrzajadgs50% (2)
- Twenty19 Smart Student Resume GuideDocument46 pagesTwenty19 Smart Student Resume GuidePraful ChandraNo ratings yet
- SCWI Program PKGDocument9 pagesSCWI Program PKGMonica CarrollNo ratings yet
- Certified Welding EngineerDocument4 pagesCertified Welding Engineerjunidomar100% (1)
- Asme PQRDocument4 pagesAsme PQRHong Dae Yoon100% (2)
- Visual Acuity Record FormDocument1 pageVisual Acuity Record Formivan_vanNo ratings yet
- 1 Guide For WPS PQR WPQR PDFDocument6 pages1 Guide For WPS PQR WPQR PDFmuhammadazhar100% (1)
- Biology Lab GuidelinesDocument36 pagesBiology Lab GuidelinessanjviewsNo ratings yet
- ReadmeDocument2 pagesReadmeMonica CarrollNo ratings yet
- Catalog About ProbeDocument42 pagesCatalog About ProbeMonica CarrollNo ratings yet
- Rekindle Hope for Your RelationshipDocument2 pagesRekindle Hope for Your RelationshipMonica CarrollNo ratings yet
- Chapter-5 Contract ManagementDocument43 pagesChapter-5 Contract Managementprem kumarNo ratings yet
- Biosynthesis of FlavoursDocument9 pagesBiosynthesis of FlavoursDatta JoshiNo ratings yet
- Clinical behavior analysis and RFT: Conceptualizing psychopathology and its treatmentDocument28 pagesClinical behavior analysis and RFT: Conceptualizing psychopathology and its treatmentAnne de AndradeNo ratings yet
- Compabloc Manual NewestDocument36 pagesCompabloc Manual NewestAnonymous nw5AXJqjdNo ratings yet
- The Ideal Structure of ZZ (Alwis)Document8 pagesThe Ideal Structure of ZZ (Alwis)yacp16761No ratings yet
- Philippine Politics and Constitution SyllabusDocument7 pagesPhilippine Politics and Constitution SyllabusIvy Karen C. Prado100% (1)
- Introduction To Managerial Accounting Canadian 5th Edition Brewer Solutions ManualDocument25 pagesIntroduction To Managerial Accounting Canadian 5th Edition Brewer Solutions ManualMaryJohnsonsmni100% (57)
- JA Ip42 Creating Maintenance PlansDocument8 pagesJA Ip42 Creating Maintenance PlansvikasbumcaNo ratings yet
- EPM Mid Lecture 03 Chapt 1Document17 pagesEPM Mid Lecture 03 Chapt 1Partho Protim MondolNo ratings yet
- Math 2 Curriculum GuideDocument19 pagesMath 2 Curriculum GuideMichelle Villanueva Jalando-onNo ratings yet
- A Laboratory Experiment in Crystals and Crystal Model Building ObjectivesDocument7 pagesA Laboratory Experiment in Crystals and Crystal Model Building ObjectivesrajaaNo ratings yet
- GEd 105 Midterm ReviewerDocument17 pagesGEd 105 Midterm ReviewerAndryl MedallionNo ratings yet
- (Nima Naghibi) Rethinking Global Sisterhood Weste PDFDocument220 pages(Nima Naghibi) Rethinking Global Sisterhood Weste PDFEdson Neves Jr.100% (1)
- Human Resource Management (MGT 4320) : Kulliyyah of Economics and Management SciencesDocument9 pagesHuman Resource Management (MGT 4320) : Kulliyyah of Economics and Management SciencesAbuzafar AbdullahNo ratings yet
- British and American Culture Marking RubricDocument5 pagesBritish and American Culture Marking RubricAn Ho LongNo ratings yet
- 2022 - J - Chir - Nastase Managementul Neoplaziilor Pancreatice PapilareDocument8 pages2022 - J - Chir - Nastase Managementul Neoplaziilor Pancreatice PapilarecorinaNo ratings yet
- 8483724Document24 pages8483724ejkiranNo ratings yet
- TiONA 592 PDS - ENDocument1 pageTiONA 592 PDS - ENQuang VANo ratings yet
- OB HandoutsDocument16 pagesOB HandoutsericNo ratings yet
- Pengkondisian Kesiapan Belajar Untuk Pencapaian Hasil Belajar Dengan Gerakan Senam OtakDocument9 pagesPengkondisian Kesiapan Belajar Untuk Pencapaian Hasil Belajar Dengan Gerakan Senam OtakSaadah HasbyNo ratings yet
- Calibration GuideDocument8 pagesCalibration Guideallwin.c4512iNo ratings yet
- ZJJ 3Document23 pagesZJJ 3jananiwimukthiNo ratings yet
- 1 Starter WBDocument88 pages1 Starter WBHYONo ratings yet
- Design Process at LEGODocument5 pagesDesign Process at LEGOkapsarcNo ratings yet
- Big Band EraDocument248 pagesBig Band Erashiloh32575% (4)
- Westford University College readies flagship campus with new programsDocument20 pagesWestford University College readies flagship campus with new programsSaju JanardhananNo ratings yet
- Pahang JUJ 2012 SPM ChemistryDocument285 pagesPahang JUJ 2012 SPM ChemistryJeyShida100% (1)
- PExam 2020Document126 pagesPExam 2020Omama MaazNo ratings yet
- LAU Paleoart Workbook - 2023Document16 pagesLAU Paleoart Workbook - 2023samuelaguilar990No ratings yet
- Optitex Com Products 2d and 3d Cad SoftwareDocument12 pagesOptitex Com Products 2d and 3d Cad SoftwareFaathir Reza AvicenaNo ratings yet