The SIJ Transactions on Computer Science Engineering & its Applications (CSEA), Vol. 2, No.
1, January-February 2014
ISSN: 2321 2381 2014 | Published by The Standard International Journals (The SIJ) 7
AbstractThe computer graphic industry, gaming industries and some photographic related industries wanted
a realistic pictures from outsides (i.e.) world. But earlier stage the photographic field using low dynamic
range images. From the low dynamic range we cannot get the whole real values from an image. Some values
may be disordered and some artifacts occurred on an image. So we cannot get the realistic picture. To
overcome these problems we have to introduce high dynamic range image. An earlier the single scene captured
by single short in LDRI. So, we cannot get the real values of an image but HDRI the single short captured by
three different exposure. Combine the low intensity value images into the high dynamic range image through
Tone mapping techniques. Finally using the HDRI gets the realistic values from natural world. This paper
focus on one of the emerging technologies and how it can be developed in achieving effective solution. We
introduce evolution of HDRI, process of HDRI, and framework process. This paper concludes with discussions
and list of application in HDRI.
KeywordsExposure; Intensity; Dynamic; Luminance; Response Curve.
AbbreviationsComplementary Metal Oxide Semiconductor (CMOS); Digital Pixel Sensor (DPS); High
Dynamic Range Image (HDRI); Low Dynamic Range image (LDRI).
I. INTRODUCTION
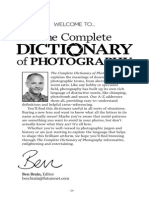
single picture is unable accent all the details due to
the different light distribution. HDR
photography overcomes that by combining several
pictures with different exposure settings to produce an image
that shows all areas in full detail. HDRI technique is more
important in photography today. A larger exposure image
represents both light and dark areas equally. High-dynamic-
range imaging is a set of methods used in imaging
and photography to capture a greater dynamic range between
the lightest and darkest areas of an image than current
standard digital imaging methods or photographic methods.
HDR images can represent more accurately the range of
intensity levels found in real scenes, from direct sunlight.
HDR methods provide higher dynamic range from the
imaging process. Non-HDR cameras take pictures at one
exposure level with a limited contrast range. This results in
the loss of detail in bright or dark areas of a picture,
depending on whether the camera had a low or high exposure
setting. HDR compensates for this loss of detail by taking
multiple pictures at different exposure levels and intelligently
stitching them together to produce a picture that is
representative in both dark and bright areas.
Figure 1: High-Dynamic-Range (HDR) Image made out of Three
Pictures
The dynamic range is a ratio between a maximum and
minimum physical measure. In photography, its definition
depends on what the dynamic range refers to.
For a scene: ratio between the brightest and darkest
parts of the scene.
For a display: ratio between the maximum and
minimum luminances emitted from the screen.
8- Bit Images (i.e. 24 bits per pixel for a color
image) are considered Low Dynamic Range.
16 Bit Images (i.e. 48 bits per pixel for a color
image) resulting from RAW conversion are still
considered Low Dynamic Range, even though the
range of values they can encode is much higher than
for 8 bit images (65536 versus 256).
A
*Scholar, Centre of Information Technology and Engineering, Manonmaniam Sundaranar University, Tirunelveli, Tamilnadu, INDIA.
E-Mail: muthutnin{at}gmail{dot}com
**Lecturer, Department of Computer Science, Mahatma Gandhi Arts and Science College for Women, Solaiseri, Tamilnadu, INDIA.
E-Mail: deepashuv90{at}gmail{dot}com
S. Muthumariammal* & A.S. Deepa**
An Overview on Evolution, Application,
Suggested Process for HDRI
The SIJ Transactions on Computer Science Engineering & its Applications (CSEA), Vol. 2, No. 1, January-February 2014
ISSN: 2321 2381 2014 | Published by The Standard International Journals (The SIJ) 8
32- Bit images (i.e. 96 bits per pixel for a color
image) are considered High Dynamic Range. 32
Bit images are coded using floating point numbers.
HDR is also commonly used to refer to display of images
derived from HDR imaging in a way that exaggerates
contrast for artistic effect. The two main sources of HDR
images are computer renderings and merging of multiple low-
dynamic-ranges (LDR). Tone mapping methods, which
reduce overall contrast to facilitate display of HDR images on
devices with lower dynamic range, can be applied to produce
images with preserved or exaggerated local contrast for
artistic effect. High-dynamic-range photographs are generally
achieved by capturing multiple standard photographs, often
using exposure bracketing, and then merging them into an
HDR image. Digital photographs are often encoded in a
camera's raw image format, because 8 bit JPEG encoding
doesn't offer enough values to allow fine transitions (and
introduces undesirable effects due to the lossy compression).
Any camera that allows manual over- or under-exposure of a
photo can be used to create HDR images. This includes film
cameras, though the images may be digitized for processing
with software HDR methods. Shooting HDR scenes with
conventional digital cameras requires photographing a
sequence of exposure-bracketed Low Dynamic Range (LDR)
captures, and then using to merge them into a single HDR
file. The HDR file is then Tone mapped back into an LDR
image that can be displayed and printed. Tone mapping
method reduces the overall contrast of an image in LDRI
[Jonathan Cohen et al., 2001].
1.1. Comparison of HDRI with Traditional I mages
Traditional images are stored the pixel values in a fixed
integer format. So it cannot store all the pixel values of an
image. HDR images often don't use fixed ranges per
color channel other than for traditional images to represent
many more colors over a much wider dynamic range. For that
purpose, doesnt use integer values to represent the single
color channels (e.g., 0...255 in an 8 bit per pixel interval for
red, green and blue) but instead use a floating point
representation [Debevec, 1998]. Common are 16-bit or 32-
bit floating point numbers to represent HDR pixels.
1.2. Limitations
Real-world dynamic range is far greater than 256 intensity
levels in the natural world 100 000 000:1. That the eye can
accommodate in a single view 10 000:1.That a typical
CRT/LCD monitor can display 100:1. Capturing and display
devices support a very limited range of luminance [Lee Frost,
2000]. Limited luminance range and limit color gamut (only
RGB color) displayed in low dynamic range imaging. High
luminance range and Full color gamut (i.e. all colors)
displayed in High dynamic range imaging.
1.3. Tone Mapping
High dynamic range images are generated using special
cameras that capture multiple low dynamic range (LDR)
images with different exposures times. Then these images are
combined together in order to get an image with high
dynamic range. Displaying devices has limited dynamic
range; most display devices support 24-bit per color pixel.
HDR images are reproduced into a lower dynamic range in
order to be displayed in normal display devices [Reinhard et
al., 2005]. Tone mapping is the process of reducing the
dynamic range of the HDR image in order to be displayed on
an LDR displaying device while maintaining the image
integrity. Tone Mapping is the process of converting the tonal
values of an image from a high range to a lower one. For
instance, an HDR image with a dynamic range of 100,000:1
will be converted into an image with tonal values ranging
from just 1 to 255.
1.4. Applications
Global illumination techniques (physically-based
rendering)
Mixed reality rendering (special effects for movies
and commercials)
Human vision simulation and psychophysics
Satellite imaging (remote sensing)
Digital compositing for film
Digital cinema
Today, the main users of HDR imaging devices are
specialized professionals working in the film, animation and
VR industries. Some applications are listed below.
Film
Tools such as HDRShop by Paul Debevec enable to convert a
series of photographs into a light probe - a special image that
represents the lighting environment in a room. It can then use
the light probe to light virtual objects, so that the virtual
objects actually appear to be lit by the light from the room.
This technique is especially useful for compositing computer
graphic objects into images of real scenes. Hollywood films
use light maps extensively to blend CGI into a scene.
Panoramas
Another use for HDR is in panoramic images. Panoramas
often have a wide dynamic range, e.g. one part of the
panorama may contain the sun, and another part may be in
deep shadow. Online web panoramas constructed from HDR
images look much better than non-HDR equivalents.
Games
A third use for HDR is in computer games. Recent computer
graphics cards support HDR texture maps. With HDR texture
maps, you can render objects using light probes, in real time,
yielding much more dynamic and interesting lighting effects.
High Dynamic Range Lighting Effects are used in many
new high-end games.
II. HDRI EVOLUTION
The pixel values are not correlated to luminance in the real
scene, they merely indicate if one object is more or less bright
than another. Recent advances in HDRI have shown how
those limitations may be overcome [Battiato et al., 2003].
With HDRI, images of the real world may be accurately
captured, stored process and displayed.
The SIJ Transactions on Computer Science Engineering & its Applications (CSEA), Vol. 2, No. 1, January-February 2014
ISSN: 2321 2381 2014 | Published by The Standard International Journals (The SIJ) 9
Figure 2: Pipeline Process
First the scene capture by the lens using stutter speed,
aperture, dynamic range. HDR files using these extra bits are
also used more efficiently than typical 8 or 16-bit images
(low dynamic range images). The LDR file format is able
to record a minimum dynamic range values. The values are
stored in fixed integer values. So it could not able to store
large amount of color information. The 32-bit HDR file
format is able to record a greater dynamic range because it
uses its bits to specify floating point numbers. The storing
image is processed by some tone mapping algorithms for get
a HDR image [Mann & Picard, 1995]. Finally, compress the
HDR images in order to display them on LDR displays. Tone
mapping is the operation that reduces the dynamic range of
the input content to fit the dynamic range of the display
technology.
2.1. HDRI Formation
High dynamic range image, referred as HDRI is a
combination of multiple images with different exposures. The
very dark and bright areas of a scene can be recorded at the
same time into an image, avoiding under-exposed and over-
exposed areas [Debevec, 1998]. There are three formation
steps are using in HDRI.
2.1.1. HDR Image Acquisition
There are two examples of new imaging sensors which can
take an HDR scene in one shot: Digital Pixel Sensors (DPS)
and high dynamic range CMOS (HDRC). DPS climb more
transistors to pixels. So each pixel has its own analog-to-
digital converter and its own logic circuits. Since DPS are
capable of 10,000 frames per second. After taking pictures
with several exposures for each capture, they are combined
into an HDR image at the lowest levels in each pixel signal.
Another new imaging sensor is high dynamic range CMOS
(HDRC), a CMOS-based sensor with per-pixel readout logic.
HDRC can capture each frame with up to four differently
exposes captures to create an HDR image [Ward, 1994]. Both
approaches depend on how many transistors can be mounted
on a chip. The cameras with such new imaging sensors are
already available however; a big drawback of those highest-
end sensors is their cost.
2.1.2. Multi-Exposure Techniques
A basic idea of multi-exposure techniques is that an HDR
image is reconstructed from a series of LDR images with
different exposures taken by the same camera from the same
position. Several multi-exposure algorithms have been
introduced such as. Each algorithm has a different strategy
for recovering the response curve of a camera which is
needed to express pixel values for each LDR image in the
same intensity space.
2.1.3. 3D Renderers for HDR Images
There is a number of 3D rendering methods to produce HDR
scenes in
The classical photorealistic rendering approaches
such as scan line use the lighting model of direct
illumination. It can place fake objects to make the
final result as HDR, for example, negative lights,
shadow mapping, textures, and ramps. These
approaches are the simplest and fastest methods to
render HDR scenes; however, they require the users
to have experience and artistic skills.
Physically based rendering methods can produce
more visually accurate results than the classical
approaches, however, they still require some talent
and experience for the users.
Image-based lighting method is more intuitive and
has a huge potential to make use of HDR imagery
[Ward, 1994]. Image based lighting firstly records
environmental lighting characteristics in an image of
a sphere, then the recorded characteristics of the
surroundings are taken into account with the
rendered scene by using global illumination
technique [Reinhard et al., 2007].
III. PROCESS OF HDRI
In HDRI process it will be divided into four parts. Such as
scene selection, LDRI sequence shoot, Assembly and HDRI
formation, photography skills for HDRI.
3.1. Scene Selection
The selection of scene is most important in HDRI process. It
captures the scene data between dark regions to bright
regions. The lighting of the image is more important.
3.2. LDRI Sequence Shoots
In the HDRI process, the next step after the scene selection is
shooting the sequence of images with different exposures.
The single scene is captured by different exposures via
changing the shutter speed. Different shutter speed the image
will be captured in different exposure. To avoid the
displacement in camera while shooting the sequence of
images.
3.3. Assembly and HDRI Formation
Combine the different low dynamic exposure images into a
HDRI formation. Those images must be in a same scene. So
get a good dynamic range and real values in HDRI.
3.4. Photography Skills for HDRI
Photography skills are most important before developing
HDRI process. This includes the aperture, dynamic range, F-
stop, depth of field and shutter speed.
The SIJ Transactions on Computer Science Engineering & its Applications (CSEA), Vol. 2, No. 1, January-February 2014
ISSN: 2321 2381 2014 | Published by The Standard International Journals (The SIJ) 10
3.5. Related Terminologies
3.5.1. Aperture
Aperture is the diameter of a cameras lens opening. An
aperture is a hole or an opening through which light travels. If
an aperture is narrow, then highly paralleled rays are
admitted, resulting in a sharp focus at the image plane. A
wide aperture results in an image that is sharp around what
the lens is focusing on and blurred.
(a) Small Aperture and Slow
Shutter Speed
(b) Large Aperture and Fast
Shutter Speed
Figure 3
Set the exposure too low in a camera, then the camera
can only manage to capture the portions of the scene that are
very bright. Set the exposure too high then the camera can see
some of the dimmer portions of the room, but the brighter
portions start to cause blooming and glare, and to wash out
other portions of the image [Wicked Sago, 2013]. To
overcome those problems then Extending dynamic range by
combining differently exposed pictures.
3.5.2. Exposure Bracketing
Exposure bracketing is a simple technique professional
photographers use to ensure they properly expose their
pictures, especially in challenging lighting situations.
Exposure bracketing means it takes two more pictures: one
slightly under-exposed (usually by dialing in negative
exposure compensation, say -1/3EV) [Steve Mann, 1993].
Second one slightly over-exposed (usually by dialing in
positive exposure compensation, say +1/3EV), again
according to your cameras light meter. Now, most digital
cameras have auto exposure bracketing (AEB), it select that
option before taking your shot, the camera will automatically
take three shots:
One which it thinks it has perfectly exposed;
Second one slightly under-exposed;
Third one slightly over-exposed.
The amount of under- and over-exposure usually defaults
to -1/3EV and +1/3EV, but can also sometimes to specify in
SETUP. Before capturing the image, an exposure value is
calculated by the light meter, this value is chosen as the
exposure settings. Exposure bracketing is a technique of
taking several photos with varying exposures. A digital
camera can change exposure in several ways. When it comes
to HDR photography, its essential that exposure is controlled
by shutter speed while keeping aperture and ISO sensitivity
fixed.
3.5.3. Dynamic Range
Dynamic range is the amount of detail present in a scene, a
camera can capture. Dynamic range in photography describes
the ratio between the maximum and minimum measurable
light intensities (white and black, respectively) [Ahmet Oguz
Akyuz & Erik Reinhard, 2007].
The dynamic range of a digital camera can therefore be
described as the ratio of maximum light intensity measurable
(at pixel saturation), to minimum light intensity measurable
(above read-out noise). The most commonly used unit for
measuring dynamic range in digital cameras is the f-stop,
which describes total light range by powers of 2. A contrast
ratio of 1024:1 could therefore also be described as having a
dynamic range of 10 f-stops (since 210 = 1024). Depending
on the application, each unit f-stop may also be described as a
zone or eV.
3.5.4. F-Stop
The unit of measuring aperture is called F-stop. There are two
factors in creating exposure: The time light is allowed in and
the amount of light that is allowed in to the camera. The math
for exposure is exposure is equal to time multiplied by
intensity [Smith, 2007].
I T E
A shutter opens up for a moment and closes. This is
called shutter speed. Shutter speeds can vary from the very
fast (e.g. 1/8000 second) to very long (e.g. 1 minute). This is
more difficult to understand is how the camera determines
the amount of light into the camera. This is determined
by f/stop.
3.5.5. Depth of Field
Depth of field is controlled by changing the aperture setting
on camera. Like our eye, a camera lens has an iris inside that
can open or close to let in more or less light. It controls the
size of this hole, or aperture, by changing the aperture setting,
which is measured using a scale of f-stops. The larger the
aperture, the shallower your depth of field will be, meaning a
smaller portion of your image will be in focus.
Figure 4
A small F-Stop is a large aperture opening and a large F-
Stop is a small aperture opening. Because a smaller aperture
limits the amount of light entering the lens, a large F-Stop
also requires more light to properly expose an image.
3.5.6. Shutter Speed
The camera's shutter speed, the lens's brightness (f-number),
and the scene's luminance together determine the amount of
light that reaches the film or sensor (the exposure). Exposure
value (EV) is a single quantity that accounts for the shutter
speed and the f-number. Multiple combinations of shutter
speed and f-number can give the same exposure value.
The SIJ Transactions on Computer Science Engineering & its Applications (CSEA), Vol. 2, No. 1, January-February 2014
ISSN: 2321 2381 2014 | Published by The Standard International Journals (The SIJ) 11
Figure 5: Shutter Speed
In the above figure shows the photograph to the right
was taken with a slower shutter speed than that to the left,
creating a more pronounced motion blur effect and longer
streaks of light from vehicle headlights. Slower shutter
speeds are often selected to suggest movement in a still
photograph of a moving subject [Blain Brown, 2002].
IV. FRAMEWORK PROCESS
4.1. Histogram Equalization
Histogram equalization is performed on each image; the
purpose to do so is to normalize the image. Histogram
equalization is a process of automatically determining a
transformation function which produces an image with a
uniform histogram. The results from this technique are
predictable. It is fully automatic.
4.2. Edge Detection
Edges correspond to discontinuities in the homogeneity
criterion for segments. The edge detection process obtains
three edges vector and sums it all together. Finally the
resultant edge vector is digitized.
4.3. Zigzag
Zigzag is the standard operation in image processing. The
initial idea behind zigzag is to obtain a vector for analyzing at
a later stage. The zigzag pattern is applied. so that the matrix
takes a new row of the vector shape. This process helps in
reducing the matrix size representation when the zeros are
extracted from the resultant vector in the Extract Zeros
process.
4.4. Extract Zeros
Extract zero is a simple process that is used to extract all
zeros out of any vector under observation or analysis. We
utilize it to remove all the zeros in the obtained resultant
vector. The framework is developed on simple digital image
processing concepts. All reference images are required to go
through Edge Detection process. Each image in the
sequence will pass through Histogram Equalization stage.
The edges of the sequence are subtracted from the reference
image to obtain the difference in the image and edge
detection. The results of the difference images are summed
up and passed through the Zig Zag process to obtain 1 row
vector. The zeros in the one row vector are extracted the
Extract Zeroes process. The final calculated vector is the
result of the process, analysis of which reveals the camera
movement while the images are being taken.
V. EXPERIMENTAL RESULT
Some of the best outdoor photography opportunities can often
result in disappointing results. The pictures never seem to
look the same as in real life. This is especially problematic in
shooting sunsets, backlit shots, and dramatic cloud pictures.
The problem is primarily due to dynamic range limitations of
photography. Dynamic range is the ratio between the
brightest and darkest areas of a scene. Film and digital
sensors just cannot capture the full range of light seen in
nature. The worst cases are shooting towards the sun at or
near sunset, where the sky is very bright, but the land is dark
and shaded. Usually, shooting sunsets results in silhouettes,
where the sky is properly exposed, but the foreground is
black and featureless. Another situation, with somewhat less
dynamic range, is shooting scenery with a bright sky and
clouds. Exposing properly for the sky and clouds often results
in the land being too dark.
Figure 6: The sky and clouds are very bright. The low angle of the
sun creates deep shadows on the hills. With the sky exposed
properly, the shadowed areas would normally be black and
foreground would be dark. HDR processing keeps the sky properly
exposed, while bringing out the details in the shaded areas
Figure 7: The sun is just to the left of the frame, brightly side-
lighting the clouds. Most of the mid-ground is in shade. The
foreground is brightly sunlit. HDR processing equalizes all of these
Figure 8: The sun is behind the clouds, highlighting parts of the
clouds, but leaving the foreground in shadow. HDR processing
keeps the foreground from getting too dark
The SIJ Transactions on Computer Science Engineering & its Applications (CSEA), Vol. 2, No. 1, January-February 2014
ISSN: 2321 2381 2014 | Published by The Standard International Journals (The SIJ) 12
Figure 9: This is shooting directly towards the sun, which is behind
the clouds. In a normal photograph, if the clouds and sky were
properly exposed, the foreground and hills would be nearly black
Figure 10: This is another mix of bright clouds, partially sunlit mid-
ground, and the foreground in shadow
VI. CONCLUSION AND FUTURE WORK
This project concludes the basic understanding of the HDRI.
HDRI Process, Framework process and applications. In this
paper concludes study overview of HDRI process and how it
will works on digital photography. It describes the capturing,
storing, processing and displaying of the High Dynamic
Range Image. The camera speed, aperture, shutter speed is
most important for HDRI. An HDR image stores values
corresponding to the luminance of the real scene with a
reasonable accuracy, which may be further improved through
additional camera calibration. Although taking HDR images
with cameras is time-consuming and effective. Computer
graphic industries and gaming industries are needed to
develop the high dynamic range images. Analyzed how it
provides a cost and time effective solution.
A scene capture by a camera at that time some artifacts
will be occurring on those images. Then we combined those
LDR images to HDR using tone mapping concept. Those
artifacts are not automatically detected and remove. It was
manual calculation to apply artifacts removal and filtering
techniques on an image. After that only we get a good image.
In my future work when taken an image by camera, it
automatically detect the artifacts and remove that all. It
reduces the manual work and time saving also. Finally it
produces an excellent high dynamic range image.
REFERENCES
[1] Steve Mann (1993), Compositing Multiple Pictures of the
Same Scene, IS&T's 46th Annual Conference, Cambridge,
Massachusetts.
[2] G. Ward (1994), Real Pixels, Graphics Gems, Vol. IV, Pp.
8083.
[3] S. Mann & R.W. Picard (1995), On being Undigital with
Digital Cameras: Extending Dynamic Range by Combining
Differently Exposed Pictures, Proceedings of IS&T 48
th
Annual Conference, Society for Imaging Science and
Technology Annual Conference, Washington, DC, Pp. 422
428.
[4] P. Debevec (1998), Rendering Synthetic Objects into Real
Scenes: Bridging Traditional and Image-based Graphics with
Global Illumination and High Dynamic Range Photography,
Proceedings 25
th
Annual Conference on Computer Graphics
and Interactive Techniques, Pp. 189198.
[5] Cub Kahn (1999), Essential Skills for Nature Photography,
Amherst Media. ISBN 1-58428-009-3.
[6] Lee Frost (2000), The Complete Guide to Night and Low-
Light Photography, Amphoto Books. ISBN 0-8174-5041-6.
[7] Jonathan Cohen, Chris Tchou, Tim Hawkins & Paul Debevec
(2001), Real-Time High Dynamic Range Texture Mapping,
Proceedings of the 12th Eurographics Workshop on Rendering
Techniques (Springer), Pp. 313320.
[8] Blain Brown (2002). Cinematography: Theory and Practice:
Image making for Cinematographers, Directors &
Videographers, Focal Press.
[9] S. Battiato, A. Castorina & M. Manucuso (2003) High
Dynamic Range Imaging for Digital Still Camera: An
Overview, Journal of Electronic Imaging, Vol. 12, No. 3, Pp.
459469.
[10] E. Reinhard, G. Ward, S. Pattanaik & P. Debevec (2005),
High Dynamic Range Imaging Acquisition, Display and
Image-based Lighting, 1st Ed. San Francisco: Morgan
Kaufmann Publisher, An Imprint of Elsevier, Pp. 115164.
[11] E. Reinhard, E.A. Khan, Akyuz & G. Johnson (2007), Color
Imaging: Fundamentals and Applications, A K Peters, Ltd.
[12] Smith (2007), Warren Modern Optical Engineering, 4th Ed.
McGraw-Hill Professional.
[13] Ahmet Oguz Akyuz & Erik Reinhard (2007), Noise Reduction
in High Dynamic Range Imaging, Journal of Visual
Communication and Image Representation, Vol. 18, No. 5, Pp.
366376.
[14] Wicked Sago (2013), What is Aperture?, Retrieved 3 March
2013.
S. Muthumariammal. I completed my U.G
Bachelors of Science in Computer Science
from Madurai Kamarajar University,
Madurai and after that I completed my P.G
Master of Science in Computer Science &
Information Technology from Madurai
Kamarajar University, Madurai then I
completed my Master of Philosophy in
Information Technology from Manonmaniam
Sundaranar University, Tirunelveli. I have some special interest on
research fields like High Dynamic Range Images, Image Processing,
and Networking.
A.S. Deepa. I completed my U.G Bachelors
of Science in Information Technology from
Alagappa University, Karaikudi and after that
I completed my P.G Master of Science in
Computer Science & Information Technology
from Madurai Kamarajar University, Madurai
then I completed my Master of Philosophy in
Information Technology from Manonmaniam
Sundaranar University, Tirunelveli. I have
some special interest on research fields like High Dynamic Range
Images, Image Processing, and Operating System.
You might also like
- Parallel Computing Zernike Moments Via Combined AlgorithmsDocument9 pagesParallel Computing Zernike Moments Via Combined AlgorithmsthesijNo ratings yet
- A Model of Consumer Perception and Behavioral Intention For E-ReadingDocument6 pagesA Model of Consumer Perception and Behavioral Intention For E-Readingthesij100% (1)
- ROI of Training and Development Programmes: Challenges and DevelopmentsDocument6 pagesROI of Training and Development Programmes: Challenges and DevelopmentsthesijNo ratings yet
- The Behavioural Finance: A Challenge or Replacement To Efficient Market ConceptDocument5 pagesThe Behavioural Finance: A Challenge or Replacement To Efficient Market ConceptthesijNo ratings yet
- Modeling Inland Intermodal Container Transport Systems in TaiwanDocument6 pagesModeling Inland Intermodal Container Transport Systems in TaiwanthesijNo ratings yet
- Edge Ratio of Nifty For Last 15 Years On Donchian ChannelDocument8 pagesEdge Ratio of Nifty For Last 15 Years On Donchian ChannelthesijNo ratings yet
- A Critical Review of The Advanced Research On Emotional Intelligence in Management - Based On Relationship With OCBDocument7 pagesA Critical Review of The Advanced Research On Emotional Intelligence in Management - Based On Relationship With OCBthesijNo ratings yet
- Effect of Environmental Temperature and PH Water On Compressive Strength of Clay Brick Mixed Wood Chips Mahogany Based Building MaterialsDocument4 pagesEffect of Environmental Temperature and PH Water On Compressive Strength of Clay Brick Mixed Wood Chips Mahogany Based Building MaterialsthesijNo ratings yet
- The Role of Total Productive Maintenance (TPM) in Safety Improvement and Decreasing Incidents in Steel IndustryDocument6 pagesThe Role of Total Productive Maintenance (TPM) in Safety Improvement and Decreasing Incidents in Steel IndustrythesijNo ratings yet
- Using PECVD Technology To Manufacture Environmental Products To Meet Consumer Demand and Improve ProductivityDocument12 pagesUsing PECVD Technology To Manufacture Environmental Products To Meet Consumer Demand and Improve ProductivitythesijNo ratings yet
- Effectiveness Evaluation of Behavioural Training and Development ProgrammesDocument9 pagesEffectiveness Evaluation of Behavioural Training and Development ProgrammesthesijNo ratings yet
- A Comparative Study of Customer Satisfaction of Islamic Banks and Conventional Banks in OmanDocument5 pagesA Comparative Study of Customer Satisfaction of Islamic Banks and Conventional Banks in OmanthesijNo ratings yet
- Module Information Booklet (MIB) As A Sagacious Learning EffectivenessDocument6 pagesModule Information Booklet (MIB) As A Sagacious Learning EffectivenessthesijNo ratings yet
- An Entrepreneurial Mindset and Factors' Effect On Entrepreneur's Spirit in IndonesianDocument6 pagesAn Entrepreneurial Mindset and Factors' Effect On Entrepreneur's Spirit in IndonesianthesijNo ratings yet
- Principals' Instructional Leadership: Fostering Teacher Professional DevelopmentDocument7 pagesPrincipals' Instructional Leadership: Fostering Teacher Professional DevelopmentthesijNo ratings yet
- The Tourism Activities and The Impact of Public PoliciesDocument4 pagesThe Tourism Activities and The Impact of Public PoliciesthesijNo ratings yet
- Contributions On The Economic Assessment Methodology of Industrial Projects (E.A.M.I.P)Document9 pagesContributions On The Economic Assessment Methodology of Industrial Projects (E.A.M.I.P)thesijNo ratings yet
- Significant Economic Applications of Long Term Financial Theories and PracticesDocument4 pagesSignificant Economic Applications of Long Term Financial Theories and PracticesthesijNo ratings yet
- Vaclav Havel: The Politician Practicizing CriticismDocument9 pagesVaclav Havel: The Politician Practicizing CriticismthesijNo ratings yet
- Student Engagement: A Strategic Tool To Reform The Quality of Management EducationDocument5 pagesStudent Engagement: A Strategic Tool To Reform The Quality of Management EducationthesijNo ratings yet
- Spending & Saving Habits of Youth in The City of AurangabadDocument8 pagesSpending & Saving Habits of Youth in The City of Aurangabadthesij100% (2)
- The Sustainable Logistics Strategies For Intermodal Transport Systems of Container Ports in TaiwanDocument7 pagesThe Sustainable Logistics Strategies For Intermodal Transport Systems of Container Ports in TaiwanthesijNo ratings yet
- The Effects of Earnings Management On Dividend Policy in Nigeria: An Empirical NoteDocument8 pagesThe Effects of Earnings Management On Dividend Policy in Nigeria: An Empirical NotethesijNo ratings yet
- Gender and Violence in School: Current Phenomena and Copping StrategiesDocument8 pagesGender and Violence in School: Current Phenomena and Copping StrategiesthesijNo ratings yet
- Transformation and Consolidation of Bodo Identity: An Enquiry Into The Role of The Middle ClassDocument5 pagesTransformation and Consolidation of Bodo Identity: An Enquiry Into The Role of The Middle ClassthesijNo ratings yet
- Attributable E-Commerce Toward Purchase Intention: Online Search of Food ProductDocument7 pagesAttributable E-Commerce Toward Purchase Intention: Online Search of Food ProductthesijNo ratings yet
- Enhancing Professional Learning and Development in The Teaching of Early Childhood Mathematics Through Action ResearchDocument5 pagesEnhancing Professional Learning and Development in The Teaching of Early Childhood Mathematics Through Action ResearchthesijNo ratings yet
- Robust Algorithm For Multiclass Weighted Support Vector MachineDocument5 pagesRobust Algorithm For Multiclass Weighted Support Vector MachinethesijNo ratings yet
- Research On Hyper-Connectivity Element and Its Utilization On Consumer Performance Expectancy: A Literature AnalysisDocument9 pagesResearch On Hyper-Connectivity Element and Its Utilization On Consumer Performance Expectancy: A Literature AnalysisthesijNo ratings yet
- An Impact of Self-Leadership On Innovative Behaviour in Sports Educators and Understanding of Advanced ResearchDocument6 pagesAn Impact of Self-Leadership On Innovative Behaviour in Sports Educators and Understanding of Advanced Researchthesij100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Defy Limitations - The Ultimate in Nikon DX-format PerformanceDocument2 pagesDefy Limitations - The Ultimate in Nikon DX-format PerformanceZsolt KántorNo ratings yet
- Pro Cam TutorialDocument18 pagesPro Cam Tutorialxsurfer7No ratings yet
- Fundamentals of Photography - John Greengo - CameraPDFDocument258 pagesFundamentals of Photography - John Greengo - CameraPDFAsif Musaddeque100% (1)
- Master Mobile Photography Preview PDFDocument28 pagesMaster Mobile Photography Preview PDFMohit Jani100% (3)
- CME Camera OperationDocument42 pagesCME Camera OperationDenis LedentNo ratings yet
- Nxapp Guide1 Shooting 1Document32 pagesNxapp Guide1 Shooting 1Jamie SteegNo ratings yet
- Sverdlovsk-4 Manual (English Version 2008)Document24 pagesSverdlovsk-4 Manual (English Version 2008)algebrayfuegoNo ratings yet
- CHDK - Canon Hack Development Kit ManualDocument76 pagesCHDK - Canon Hack Development Kit Manuala90470No ratings yet
- Sony RX100 VII Advanced ManualDocument108 pagesSony RX100 VII Advanced Manualharishvasanth1982No ratings yet
- Max Well Render 3dsmax Plugin ManualDocument60 pagesMax Well Render 3dsmax Plugin ManualSébastien FNo ratings yet
- Fomapan 100Document2 pagesFomapan 100alexandru_gheoNo ratings yet
- PRECISA 1430: User ManualDocument82 pagesPRECISA 1430: User Manualsephiroth1caNo ratings yet
- Using CHDK PrintableDocument9 pagesUsing CHDK Printableflo108No ratings yet
- DIGITAL TTL MACRO FLASH INSTRUCTION MANUALDocument8 pagesDIGITAL TTL MACRO FLASH INSTRUCTION MANUALgrabbagsNo ratings yet
- Photography Report on Technical Terms and CompositionDocument40 pagesPhotography Report on Technical Terms and CompositionGary Gallarde100% (3)
- Fujica Ax-1Document45 pagesFujica Ax-1Bernardo Varela GrandaNo ratings yet
- The Complete Dictionary of PhotographyDocument63 pagesThe Complete Dictionary of PhotographyEdin Dino JunuzovicNo ratings yet
- Camera FV-5 User ManualDocument40 pagesCamera FV-5 User Manualcamerafv550% (2)
- Interior Lighting: Interior - Day - Start.3dm Tutorial AssetsDocument33 pagesInterior Lighting: Interior - Day - Start.3dm Tutorial AssetsErhan TÜRKMENNo ratings yet
- Nikon F6Document8 pagesNikon F6eternal_harpyNo ratings yet
- Sggcx2: User ManualDocument33 pagesSggcx2: User Manuall00z3rxNo ratings yet
- Ricoh KR-5Document24 pagesRicoh KR-5Luis Monteiro MeloNo ratings yet
- Leica M6 InstructionsDocument22 pagesLeica M6 Instructionsamoebahydra67% (3)
- Manual JD4.1z8 ENDocument84 pagesManual JD4.1z8 ENNicholas ScottNo ratings yet
- Photo Imaging and Post Processing: PhotographyDocument26 pagesPhoto Imaging and Post Processing: PhotographyPauline Nina Madrigal100% (2)
- Luxi User's GuideDocument14 pagesLuxi User's GuidephilsouthNo ratings yet
- The Perfect Outdoor Photo PlannerDocument123 pagesThe Perfect Outdoor Photo PlannerBen ThomasNo ratings yet
- Techniques: All Photographers Should MasterDocument69 pagesTechniques: All Photographers Should MastertazzorroNo ratings yet
- LevelOne FCS-1041 PTZDocument62 pagesLevelOne FCS-1041 PTZgrtbags2302No ratings yet