You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
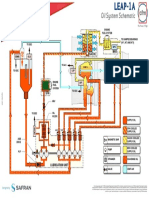
- LEAP-1A A3 79-Oil System Rev2.0Document1 pageLEAP-1A A3 79-Oil System Rev2.0SatishReddy100% (2)
- THE MEDIUM SHAPES THE MESSAGEDocument56 pagesTHE MEDIUM SHAPES THE MESSAGELudovica MatildeNo ratings yet
- Module 3 QsDocument44 pagesModule 3 QsSatishReddyNo ratings yet
- CEMEX Global Strategy CaseDocument4 pagesCEMEX Global Strategy CaseSaif Ul Islam100% (1)
- Dgca Module 11 Part 06Document19 pagesDgca Module 11 Part 06SatishReddyNo ratings yet
- Math30.CA U1l1 PolynomialFunctionsDocument20 pagesMath30.CA U1l1 PolynomialFunctionsUnozxcv Doszxc100% (1)
- Method Statement For LVAC Panel TestingDocument9 pagesMethod Statement For LVAC Panel TestingPandrayar MaruthuNo ratings yet
- Business Plan - Docx 3-Star Hospitality and Tourism Devt Centre in Mbarara - UgandaDocument49 pagesBusiness Plan - Docx 3-Star Hospitality and Tourism Devt Centre in Mbarara - UgandaInfiniteKnowledge100% (9)
- Civil Boq AiiapDocument170 pagesCivil Boq AiiapMuhammad ArslanNo ratings yet
- Wireless Sensor Networks ApplicationsDocument8 pagesWireless Sensor Networks ApplicationsanantiaNo ratings yet
- 4825398Document46 pages4825398SatishReddyNo ratings yet
- DissertationDocument2 pagesDissertationSatishReddyNo ratings yet
- Sample CV For Engineering Students - CV Formats / TemplatesDocument4 pagesSample CV For Engineering Students - CV Formats / TemplatesSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- PLAGIARISM SCAN REPORT SUMMARYDocument3 pagesPLAGIARISM SCAN REPORT SUMMARYSatishReddyNo ratings yet
- PLAGIARISM SCAN REPORT SUMMARYDocument3 pagesPLAGIARISM SCAN REPORT SUMMARYSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Evolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemDocument7 pagesEvolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- PLAGIARISM SCAN REPORT SUMMARYDocument1 pagePLAGIARISM SCAN REPORT SUMMARYSatishReddyNo ratings yet
- 1 C 0 DDocument7 pages1 C 0 DSatishReddyNo ratings yet
- Alliance Air 2015 technical circular indexDocument1 pageAlliance Air 2015 technical circular indexSatishReddyNo ratings yet
- Application of Wireless Sensor Networks To AircrafDocument7 pagesApplication of Wireless Sensor Networks To AircrafSatishReddyNo ratings yet
- 04 Sensors AircraftDocument3 pages04 Sensors AircraftSatishReddyNo ratings yet
- 02 Outline ReportDocument3 pages02 Outline ReportSatishReddyNo ratings yet
- APA Style – Journal Article without DOIDocument2 pagesAPA Style – Journal Article without DOISatishReddyNo ratings yet
- CAT A 11A MAY 2018 BLR Quick Revision NotesDocument8 pagesCAT A 11A MAY 2018 BLR Quick Revision NotesSatishReddyNo ratings yet
- 06 of 2015Document3 pages06 of 2015SatishReddyNo ratings yet
- 07 of 2015Document1 page07 of 2015SatishReddyNo ratings yet
- 03 Outline Evaluation Sheet 1Document2 pages03 Outline Evaluation Sheet 1SatishReddyNo ratings yet
- 1212Document36 pages1212Sumeet PandeyNo ratings yet
- 05 of 2015 (General)Document1 page05 of 2015 (General)SatishReddyNo ratings yet
- Gmail - EASA approved training program (Airbus A 320 and B 737Document1 pageGmail - EASA approved training program (Airbus A 320 and B 737SatishReddyNo ratings yet
- 1212Document36 pages1212Sumeet PandeyNo ratings yet
- f7 Special PermitDocument5 pagesf7 Special PermitSingh Vineet Kumar -No ratings yet
- MatrikonOPC Server For Simulation Quick Start Guide PDFDocument2 pagesMatrikonOPC Server For Simulation Quick Start Guide PDFJorge Perez CastañedaNo ratings yet
- Medhat CVDocument2 pagesMedhat CVSemsem MakNo ratings yet
- Application Tracking System: Mentor - Yamini Ma'AmDocument10 pagesApplication Tracking System: Mentor - Yamini Ma'AmBHuwanNo ratings yet
- Kj1010-6804-Man604-Man205 - Chapter 7Document16 pagesKj1010-6804-Man604-Man205 - Chapter 7ghalibNo ratings yet
- (DO-CYT-T1-16) - KASSAHUN ComparisionDocument126 pages(DO-CYT-T1-16) - KASSAHUN ComparisionMohammed AdaneNo ratings yet
- CSCI5273 PS3 KiranJojareDocument11 pagesCSCI5273 PS3 KiranJojareSales TeamNo ratings yet
- The General Agreement On Trade in Services An IntroductionDocument22 pagesThe General Agreement On Trade in Services An IntroductionakyregisterNo ratings yet
- ME6019 - NON DESTRUCTIVE TESTING AND MATERIALS MCQ PadeepzDocument13 pagesME6019 - NON DESTRUCTIVE TESTING AND MATERIALS MCQ PadeepzAjithNo ratings yet
- Superelement Modeling-Based Dynamic Analysis of Vehicle Body StructuresDocument7 pagesSuperelement Modeling-Based Dynamic Analysis of Vehicle Body StructuresDavid C HouserNo ratings yet
- Private Copy of Vishwajit Mishra (Vishwajit - Mishra@hec - Edu) Copy and Sharing ProhibitedDocument8 pagesPrivate Copy of Vishwajit Mishra (Vishwajit - Mishra@hec - Edu) Copy and Sharing ProhibitedVISHWAJIT MISHRANo ratings yet
- E4PA OmronDocument8 pagesE4PA OmronCong NguyenNo ratings yet
- SISU Datenblatt 7-ZylDocument2 pagesSISU Datenblatt 7-ZylMuhammad rizkiNo ratings yet
- Term Paper Mec 208Document20 pagesTerm Paper Mec 208lksingh1987No ratings yet
- Shenzhen Gooky Technology Co.,Ltd.: Laptop Price ListDocument1 pageShenzhen Gooky Technology Co.,Ltd.: Laptop Price ListOusman KabaNo ratings yet
- Lunakleen: Standard Type Hepa FilterDocument1 pageLunakleen: Standard Type Hepa FilterRyan Au YongNo ratings yet
- CP Exit Srategy Plan TemplateDocument4 pagesCP Exit Srategy Plan TemplateKristia Stephanie BejeranoNo ratings yet
- Corvette Stingray - Papercraft Sports Car: Food Living Outside Play Technology WorkshopDocument22 pagesCorvette Stingray - Papercraft Sports Car: Food Living Outside Play Technology WorkshopStylus ClearingNo ratings yet
- Papi AdbDocument50 pagesPapi AdbSilvio Figueiredo0% (1)
- Baylan: VK-6 Volumetric Water MeterDocument1 pageBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaNo ratings yet
- M88A2 Recovery VehicleDocument2 pagesM88A2 Recovery VehicleJuan CNo ratings yet
- Dani RodrikDocument12 pagesDani Rodrikprogramas4242No ratings yet
- Coronary artery diseases reviewDocument43 pagesCoronary artery diseases reviewKeputrian FKUPNo ratings yet
- Rodriguez, Joseph Lorenz Ceit-08-402ADocument7 pagesRodriguez, Joseph Lorenz Ceit-08-402AJOSEPH LORENZ RODRIGUEZNo ratings yet
- TMA - ExerciseDocument3 pagesTMA - ExercisemorrisioNo ratings yet