You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- TM - 11-5855-214-23&p - (N04596) PDFDocument65 pagesTM - 11-5855-214-23&p - (N04596) PDFtyra24No ratings yet
- Tigers Binocular Vision Enables Depth PerceptionDocument5 pagesTigers Binocular Vision Enables Depth PerceptionpaidalaNo ratings yet
- Magnetism Workhsheet Siap EditDocument10 pagesMagnetism Workhsheet Siap EditMamberamo ClassNo ratings yet
- Fact Sheet Cancers enDocument2 pagesFact Sheet Cancers enO.r. CadzNo ratings yet
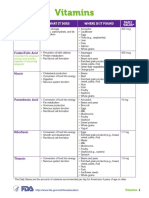
- Iron Rich FoodsDocument2 pagesIron Rich FoodsdorathiNo ratings yet
- Sewing Lessons For Beginners 43pagesDocument43 pagesSewing Lessons For Beginners 43pagesterri100% (2)
- Colds and Flu in Children Tcm28 195271Document2 pagesColds and Flu in Children Tcm28 195271dorathiNo ratings yet
- Compendium H SC CoursesDocument90 pagesCompendium H SC CoursesdorathiNo ratings yet
- Dangers of The Paleo Diet by Tandi HartleDocument14 pagesDangers of The Paleo Diet by Tandi HartledorathiNo ratings yet
- Huskylock Blouse LRDocument4 pagesHuskylock Blouse LRdorathiNo ratings yet
- Vitamins and Minerals GuideDocument5 pagesVitamins and Minerals GuideHrithik Sai TummalaNo ratings yet
- List of High Protein FoodsDocument2 pagesList of High Protein FoodsdorathiNo ratings yet
- History of GarmentsDocument116 pagesHistory of GarmentsJanaki RamasamyNo ratings yet
- How To Change A SuitDocument5 pagesHow To Change A SuitdorathiNo ratings yet
- Seluar AsasDocument6 pagesSeluar Asashamba_dahNo ratings yet
- Edition 2 Sneak Peek PDFDocument10 pagesEdition 2 Sneak Peek PDFdorathiNo ratings yet
- Menu of Vegetarian Dishes PDFDocument6 pagesMenu of Vegetarian Dishes PDFdorathiNo ratings yet
- Abdominal Pain in ChildrenDocument2 pagesAbdominal Pain in ChildrendorathiNo ratings yet
- Dandruff ControlDocument7 pagesDandruff Controldorathi0% (1)
- The Importance of Outdoor Play and Its Impact On Brain Develpoment in ChildrenDocument24 pagesThe Importance of Outdoor Play and Its Impact On Brain Develpoment in Childrenapi-269479291100% (1)
- c2Document21 pagesc2dorathiNo ratings yet
- Vitamins and Minerals GuideDocument5 pagesVitamins and Minerals GuideHrithik Sai TummalaNo ratings yet
- Ways To Reduce Food Waste in Your Business: WWW - Epa.nsw - Gov.auDocument2 pagesWays To Reduce Food Waste in Your Business: WWW - Epa.nsw - Gov.audorathiNo ratings yet
- Get Fit at Home Preview PDFDocument14 pagesGet Fit at Home Preview PDFsauravNo ratings yet
- Daniel Fast Recipe PDFDocument25 pagesDaniel Fast Recipe PDFdorathi100% (1)
- Get Fit PDFDocument14 pagesGet Fit PDFdorathiNo ratings yet
- Tamil Samayal - 30 Varities For Beauty & HealthDocument21 pagesTamil Samayal - 30 Varities For Beauty & HealthSakthivel100% (6)
- Green Coffee Bean Extract As A Weight Loss Supplement 2161 0509 1000180 PDFDocument3 pagesGreen Coffee Bean Extract As A Weight Loss Supplement 2161 0509 1000180 PDFdorathiNo ratings yet
- Fruit Dishes PDFDocument22 pagesFruit Dishes PDFdorathiNo ratings yet
- Tamil Samayal - 30 Fruit DishesDocument22 pagesTamil Samayal - 30 Fruit DishesSakthivel100% (5)
- Detailed Lesson Plan: PreparationDocument2 pagesDetailed Lesson Plan: PreparationdorathiNo ratings yet
- Get Fit at Home Preview PDFDocument14 pagesGet Fit at Home Preview PDFsauravNo ratings yet
- Malaysian Recipes PDFDocument6 pagesMalaysian Recipes PDFdorathiNo ratings yet
- Fundamentals of the Pickett Plot: Recognizing Reservoir PatternsDocument9 pagesFundamentals of the Pickett Plot: Recognizing Reservoir PatternsAngelMeso100% (1)
- Flux 10 4 New Features Presentation ValideDocument22 pagesFlux 10 4 New Features Presentation ValideleelNo ratings yet
- 1 Design Basis 1.1 Material and Properties 1.1 Material and PropertiesDocument13 pages1 Design Basis 1.1 Material and Properties 1.1 Material and PropertiesDarshan PanchalNo ratings yet
- Fluid Mechanics II: Key Concepts of Fluid KinematicsDocument18 pagesFluid Mechanics II: Key Concepts of Fluid KinematicsYousef FarajNo ratings yet
- Atomic absorption spectroscopy analysis of metalsDocument3 pagesAtomic absorption spectroscopy analysis of metalsVishnu VichuZNo ratings yet
- Machine Design: The Hidden Cause ofDocument6 pagesMachine Design: The Hidden Cause ofbbmokshNo ratings yet
- Fluid MechanicsDocument29 pagesFluid Mechanicsaminur3rahman-1No ratings yet
- Electronics Engg.: Detailed Solutions ofDocument52 pagesElectronics Engg.: Detailed Solutions ofAshish ChoudharyNo ratings yet
- XI Maths - I Terminal ExamDocument2 pagesXI Maths - I Terminal ExamPurisai Rajamani KumarNo ratings yet
- E-CAPS-28 - For CoE (XI) - Chemistry - (Que. - Answer Key)Document3 pagesE-CAPS-28 - For CoE (XI) - Chemistry - (Que. - Answer Key)darling deanNo ratings yet
- General Physics 1 1st Quarter Module 1 ActivitiesDocument16 pagesGeneral Physics 1 1st Quarter Module 1 ActivitiesMica LopezNo ratings yet
- Avr GeneralDocument67 pagesAvr GeneralRukma Goud Shakkari100% (2)
- McCabe-Thiele Diagrams For Binary DistillationDocument8 pagesMcCabe-Thiele Diagrams For Binary DistillationwetcoNo ratings yet
- 02 Jaulas de Agujas PDFDocument52 pages02 Jaulas de Agujas PDFRodrigo Schaider Dos SantosNo ratings yet
- Metrology AssignmentDocument31 pagesMetrology AssignmentKailas Sree Chandran100% (1)
- A Brief Overview of The Holographic TechnologyDocument5 pagesA Brief Overview of The Holographic TechnologyAltiel Ltd.No ratings yet
- Mercury Gemini Program Design Survey. NASA ERC Design Criteria Program Stability, Guidance and ControlDocument217 pagesMercury Gemini Program Design Survey. NASA ERC Design Criteria Program Stability, Guidance and ControlBob Andrepont100% (1)
- Manifest Your Desires with The Quantum CookbookDocument14 pagesManifest Your Desires with The Quantum CookbookAgarta1111No ratings yet
- Hooke's Law and Property of MaterialsnotesDocument5 pagesHooke's Law and Property of MaterialsnotesPrithu PareekNo ratings yet
- S P I C e J e T Q U e S T I o N SDocument43 pagesS P I C e J e T Q U e S T I o N SDharavGosaliaNo ratings yet
- GEC 104 Week 1 Lesson 1 Math Modern WorldDocument4 pagesGEC 104 Week 1 Lesson 1 Math Modern WorldJahnna Marie PomaresNo ratings yet
- Laws of Motion All DerivationsDocument13 pagesLaws of Motion All DerivationsYashwanthiNo ratings yet
- Applications of Nano Biotechnology in Wastewater Treatment PDFDocument9 pagesApplications of Nano Biotechnology in Wastewater Treatment PDFswaroop_exlncNo ratings yet
- Rectilinear Motion and Rotating VesselDocument4 pagesRectilinear Motion and Rotating VesselJack PresadoNo ratings yet
- Bridge Design Report - Docx 150Document17 pagesBridge Design Report - Docx 150nephembaniNo ratings yet
- Fourier Transform and Its Medical ApplicationDocument55 pagesFourier Transform and Its Medical Applicationadriveros100% (1)
- The Physics of Lorentz Transformation (A Simple Derivation of Lorentz Transformation)Document5 pagesThe Physics of Lorentz Transformation (A Simple Derivation of Lorentz Transformation)Glen PeachNo ratings yet