You might also like
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)From EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Rating: 2 out of 5 stars2/5 (1)
- Reguladores PID Ejercicios ResueltosDocument13 pagesReguladores PID Ejercicios ResueltosMaría Garrigós100% (1)
- Control PID de LuminosidadDocument19 pagesControl PID de LuminosidadRafael Toala100% (1)
- Práctica - 02 - Detector de Cruce Por CeroDocument4 pagesPráctica - 02 - Detector de Cruce Por CeroJonathan ChabléNo ratings yet
- Informe de Controladores PIDDocument20 pagesInforme de Controladores PIDfranco_3210_No ratings yet
- Taller de Filtros Sallen Key - ButterWorth y ChevyshebDocument24 pagesTaller de Filtros Sallen Key - ButterWorth y ChevyshebJuan Sebastian Cely CaroNo ratings yet
- Control de LuminosidadDocument3 pagesControl de LuminosidadAlex GoreNo ratings yet
- Práctica 2 Circuitos Combinacionales PDFDocument22 pagesPráctica 2 Circuitos Combinacionales PDFporfirio porfirioNo ratings yet
- Rele de Estado SolidoDocument11 pagesRele de Estado Solidoarmando esteban quitoNo ratings yet
- Zero CrossingDocument3 pagesZero CrossingEiverPaltaNo ratings yet
- PWM - Diseño Digital Con VHDLDocument2 pagesPWM - Diseño Digital Con VHDLlcarlosqr24No ratings yet
- Manual Software - Codesys PDFDocument18 pagesManual Software - Codesys PDFginerggg100% (1)
- Sensores Transductores y ActuadoresDocument90 pagesSensores Transductores y ActuadoresKatherine Llerena CalderónNo ratings yet
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasFrom EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasRating: 2.5 out of 5 stars2.5/5 (3)
- Sensores AutomotrizDocument10 pagesSensores Automotrizedgardo100% (1)
- Ejercicios de Transferencia de Masa 18P 2108Document1 pageEjercicios de Transferencia de Masa 18P 2108andresNo ratings yet
- Aplicaciones No Lineales Del Amplificador OperacionalDocument9 pagesAplicaciones No Lineales Del Amplificador OperacionalIsabel50% (2)
- Proyecto PIDDocument16 pagesProyecto PIDLuis Israel Quinga AcostaNo ratings yet
- Practica 4 Con Pic18f4550 ADC (Conversión de Análogo A Digital)Document2 pagesPractica 4 Con Pic18f4550 ADC (Conversión de Análogo A Digital)Alex CalderonNo ratings yet
- Informe Pid Motor HidraulicoDocument35 pagesInforme Pid Motor HidraulicoEdwin HuilcamaiguaNo ratings yet
- Control PID de Velocidad Del Motor DCDocument4 pagesControl PID de Velocidad Del Motor DCJherson Andrade Tenorio100% (1)
- Configuración de Control PIDDocument26 pagesConfiguración de Control PIDBruno Eduardo Reyes BarralesNo ratings yet
- Tesis InvernaderoDocument5 pagesTesis Invernaderoxxzvic0% (1)
- Capítulo 06 - Discretización de SeñalesDocument24 pagesCapítulo 06 - Discretización de SeñalesJulles Paul GrandNo ratings yet
- 06 - Sistemas de Control I - Ejemplo 3. Lugar Geometrico de Las Raices en SCILAB IIDocument2 pages06 - Sistemas de Control I - Ejemplo 3. Lugar Geometrico de Las Raices en SCILAB IIParrillas del SolNo ratings yet
- Proyecto Invernadero Por PIDDocument21 pagesProyecto Invernadero Por PIDMaleny Ariass0% (1)
- Control PID Discreto y ConexionXBeeDocument29 pagesControl PID Discreto y ConexionXBeeAlexander ValenciaNo ratings yet
- Unit 2 - Clasificacion Por Estructura PLCDocument26 pagesUnit 2 - Clasificacion Por Estructura PLCJaret GarciaNo ratings yet
- Laboratorio 1 Control DigitalDocument9 pagesLaboratorio 1 Control DigitalCM35No ratings yet
- Control de Posicion de Un Motor DCDocument2 pagesControl de Posicion de Un Motor DCHosworh Hernandez Avila100% (1)
- Rectificador Controlado de Onda CompletaDocument17 pagesRectificador Controlado de Onda CompletaMiguel GuardiaNo ratings yet
- Proyecto de Control AnalogoDocument24 pagesProyecto de Control AnalogoMónik TelloNo ratings yet
- Ci 555 VcoDocument8 pagesCi 555 VcoGregory Isidor ViRoNo ratings yet
- Cristian Valenzuela SCS2Document10 pagesCristian Valenzuela SCS2Javi Pinto0% (2)
- Controlador Pid Digital Implementado en Una PCDocument21 pagesControlador Pid Digital Implementado en Una PCJC B HdzNo ratings yet
- Graficas Banda ProporcionalDocument18 pagesGraficas Banda ProporcionalMarcos JimenezNo ratings yet
- Metodos de SintonizacionDocument11 pagesMetodos de SintonizacionJuanTaipeNo ratings yet
- Estabilidad de LyapunovDocument32 pagesEstabilidad de LyapunovRaul Negron GodoyNo ratings yet
- Diseño E Implementación de Un Control PID Discreto para El Control de Velocidad de Un Motor DCDocument16 pagesDiseño E Implementación de Un Control PID Discreto para El Control de Velocidad de Un Motor DChhryc7100% (5)
- Instrumentación Problemas PIDocument16 pagesInstrumentación Problemas PILc CaraveoNo ratings yet
- Sistema Calefaccion Pid - ProteusDocument12 pagesSistema Calefaccion Pid - ProteusSnaider Mendoza VillegasNo ratings yet
- Control Adaptivo Por Modelo de Referencia (Mrac) para Una Planta de Segundo OrdenDocument30 pagesControl Adaptivo Por Modelo de Referencia (Mrac) para Una Planta de Segundo Ordencss_unac100% (1)
- Norma IEC-1131-1Document6 pagesNorma IEC-1131-1alejo662007100% (6)
- Lab 05 Respuesta Transitoria y EstacionariaDocument14 pagesLab 05 Respuesta Transitoria y EstacionariaJherson Miranda CabanillasNo ratings yet
- Informe TemperaturaDocument30 pagesInforme TemperaturaAlejandro LeonNo ratings yet
- Introduccion A Sistemas de Control DistribuidoDocument47 pagesIntroduccion A Sistemas de Control Distribuidometiche_metichonNo ratings yet
- Control de Llenado y Vaciado de Un Tanque de Agua Mediante Un Sistema EléctricoDocument10 pagesControl de Llenado y Vaciado de Un Tanque de Agua Mediante Un Sistema EléctricoJaime Luis Varas ArandaNo ratings yet
- Conclusión: Poseen Dos Estados Estables: .: Circuitos Biestables o Flip-Flop (FF)Document12 pagesConclusión: Poseen Dos Estados Estables: .: Circuitos Biestables o Flip-Flop (FF)Francisco RomeroNo ratings yet
- Sintonizacion de Controladores (Informe Ieee)Document8 pagesSintonizacion de Controladores (Informe Ieee)misusibuNo ratings yet
- Control Pid DiscretoDocument8 pagesControl Pid DiscretoDanny Ochoa Correa100% (4)
- Sistemas de ControlDocument21 pagesSistemas de Controlsaint1386No ratings yet
- Cuestionario CONTROLADORESDocument5 pagesCuestionario CONTROLADORESAbezaid Gamez100% (1)
- PWM Con ArduinoDocument18 pagesPWM Con Arduinorixard179367% (3)
- Practica 2. Sistemas de ControlDocument12 pagesPractica 2. Sistemas de ControlVictor Hugo HernándezNo ratings yet
- Predictor Smith TrabajoDocument9 pagesPredictor Smith TrabajoNicolas Bizama OrellanaNo ratings yet
- Modelado Viga y BolaDocument10 pagesModelado Viga y BolaZamira Acosta RodriguezNo ratings yet
- Tarea 4 Control DigitalDocument6 pagesTarea 4 Control DigitalAldo CarrilloNo ratings yet
- Metodos de Sintonizacion de Controladores PidDocument3 pagesMetodos de Sintonizacion de Controladores Pidalexandre laymeNo ratings yet
- Control de Velocidad Proporcional Mediante Temperatura de Un Motor DCDocument29 pagesControl de Velocidad Proporcional Mediante Temperatura de Un Motor DCBrandon Romero AlfaroNo ratings yet
- Control PID de Un HornoDocument4 pagesControl PID de Un HornoFabian Condor0% (1)
- Lab Control AutomáticoDocument16 pagesLab Control AutomáticoG4Z JorgeFloridoNo ratings yet
- Asm Pic16f877Document140 pagesAsm Pic16f877Danko_123No ratings yet
- Grúa-Operador-RiggerDocument5 pagesGrúa-Operador-RiggerRodrigo Andres Heredia GarcésNo ratings yet
- Paper Elevador de VehículosDocument9 pagesPaper Elevador de VehículosRodrigo Andres Heredia GarcésNo ratings yet
- 001302217-an-01-es-SOFTWARE LOGO STARTER KIT 230RCE PDFDocument394 pages001302217-an-01-es-SOFTWARE LOGO STARTER KIT 230RCE PDFRonald Vidaurre SandovalNo ratings yet
- Acero Laminado en CalienteDocument13 pagesAcero Laminado en CalienteEdson AbelNo ratings yet
- Tubo Mecanico CuadradoDocument1 pageTubo Mecanico CuadradoRodrigo Andres Heredia GarcésNo ratings yet
- Pid Ziegler NicholsDocument6 pagesPid Ziegler NicholsAlex PerezNo ratings yet
- Procesamiento de Imágenes Con MATLABDocument14 pagesProcesamiento de Imágenes Con MATLABRodrigo Andres Heredia GarcésNo ratings yet
- Criterios para La Selección de Un Motor y Controles EléctricosDocument9 pagesCriterios para La Selección de Un Motor y Controles EléctricosRodrigo Andres Heredia GarcésNo ratings yet
- Capítulo - 03 - Levas - ShigleyDocument12 pagesCapítulo - 03 - Levas - ShigleyJonathanRVNo ratings yet
- WEG Seleccion y Aplicacion de Motores Electricos Articulo Tecnico EspanolDocument3 pagesWEG Seleccion y Aplicacion de Motores Electricos Articulo Tecnico EspanolLuis GranadosNo ratings yet
- HerediaRodrigo DACyADCDocument5 pagesHerediaRodrigo DACyADCRodrigo Andres Heredia GarcésNo ratings yet
- Diseño TermometroDocument10 pagesDiseño TermometroRodrigo Andres Heredia GarcésNo ratings yet
- VIBRACIONESDocument76 pagesVIBRACIONESRodrigo Andres Heredia GarcésNo ratings yet
- CIRCUITOS SECUENCIALES Flip - Flop J-KDocument5 pagesCIRCUITOS SECUENCIALES Flip - Flop J-KRodrigo Andres Heredia GarcésNo ratings yet
- Comandos Básicos en GNUDocument3 pagesComandos Básicos en GNUMarvin QuitioNo ratings yet
- Manual Bes Esp OilDocument180 pagesManual Bes Esp OilAdis FloresNo ratings yet
- Instalación de SODocument7 pagesInstalación de SORicardo Gutierrez SalcedoNo ratings yet
- Capítulo - 03 - Levas - ShigleyDocument12 pagesCapítulo - 03 - Levas - ShigleyJonathanRVNo ratings yet
- Sensores y ActuadoresDocument26 pagesSensores y ActuadoresRodrigo Andres Heredia GarcésNo ratings yet
- Instalacion UbuntuDocument8 pagesInstalacion UbuntuRodrigo Andres Heredia GarcésNo ratings yet
- G3 Rodrigo HerediaDocument4 pagesG3 Rodrigo HerediaRodrigo Andres Heredia GarcésNo ratings yet
- Informe Final TacometroDocument18 pagesInforme Final TacometroGabriela Nuñez0% (1)
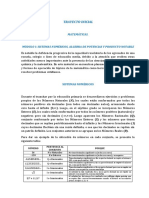
- Matemática. Modulo I.Document14 pagesMatemática. Modulo I.Rixis AlexanderNo ratings yet
- Capitulo 2 (Medida de Distancias)Document21 pagesCapitulo 2 (Medida de Distancias)RogerCárdenasNo ratings yet
- Modelación Estructural II - Clase 04 - ARMADURASDocument31 pagesModelación Estructural II - Clase 04 - ARMADURASMikal Canturín RíosNo ratings yet
- AutoCAD 2D Referencias ExternasDocument6 pagesAutoCAD 2D Referencias ExternasMaría BadilloNo ratings yet
- Manual Pickit 3Document19 pagesManual Pickit 3alvaroNo ratings yet
- 3 Mat Preparacion para Evaluacion MuestralDocument3 pages3 Mat Preparacion para Evaluacion MuestralYesenia Infante RuedaNo ratings yet
- Informe 4 Analisis Hierro en Un MedicamentoDocument5 pagesInforme 4 Analisis Hierro en Un MedicamentoYULI CRISTINA ZAMBRANO LEITONNo ratings yet
- Cuadernillo de Dirección IP-MIRDocument15 pagesCuadernillo de Dirección IP-MIRMIRIAM VIDAL GRANADOSNo ratings yet
- Un Largo PasadoDocument7 pagesUn Largo PasadoAdolfina RodriguezNo ratings yet
- Taller # 1 Calculo IntegralDocument1 pageTaller # 1 Calculo IntegralhernanescorciaNo ratings yet
- Reología e HidráulicaDocument24 pagesReología e HidráulicaJulian David Rodriguez MorenoNo ratings yet
- Estudio de Casos Sobre El Razonamiento Matemático de Alumnos Con Éxito Académico en La ESODocument423 pagesEstudio de Casos Sobre El Razonamiento Matemático de Alumnos Con Éxito Académico en La ESOtangoNo ratings yet
- Malla Electronica V5 Profesionales Color 2019-07-22Document1 pageMalla Electronica V5 Profesionales Color 2019-07-22Facultad de Ingeniería Universidad de AntioquiaNo ratings yet
- Presentación Edelec Chile 2015 PDFDocument74 pagesPresentación Edelec Chile 2015 PDFCristian ProbosteNo ratings yet
- Linea Del TiempoDocument6 pagesLinea Del TiempoCarlos VazquezNo ratings yet
- TALLER TERCER CORTE-algebra y Trigonometria 29Document30 pagesTALLER TERCER CORTE-algebra y Trigonometria 29juan pablo riveraNo ratings yet
- Filosofía y PedagogíaDocument38 pagesFilosofía y PedagogíaDonnaNo ratings yet
- Solucion Foro Estadistica 2Document8 pagesSolucion Foro Estadistica 2Danuil Pacheco pacheco100% (1)
- Materia ExcelDocument8 pagesMateria ExcelKristian Rock AndreeNo ratings yet
- Analisis Gato MecanicoDocument3 pagesAnalisis Gato MecanicoMartin Ruiz Maldonado0% (2)
- Modelo para La Integracion de Manufactura PDFDocument104 pagesModelo para La Integracion de Manufactura PDFDaniel rodriguezNo ratings yet
- Separata Ie 2010 1era ParteDocument12 pagesSeparata Ie 2010 1era ParteJC VeraNo ratings yet
- Elaboracion de Vino A Partir de Uva IsabellaDocument19 pagesElaboracion de Vino A Partir de Uva Isabellapitustereo100% (1)
- Empuje HidrostáticoDocument14 pagesEmpuje HidrostáticoMaya BanksNo ratings yet
- Solucionario de Tarea de Derivadas de Orden SuperiorDocument5 pagesSolucionario de Tarea de Derivadas de Orden SuperiorJottaa YsNo ratings yet
- 8.celdas CABINELDocument26 pages8.celdas CABINELtotokawaNo ratings yet
- UNIDAD 1 PASO 1 Planeacion Estrategica 2019Document5 pagesUNIDAD 1 PASO 1 Planeacion Estrategica 2019Andrea MuñozNo ratings yet
- Norma Tecnica Uniforme de Sanidad Personal Fuerza PublicaDocument30 pagesNorma Tecnica Uniforme de Sanidad Personal Fuerza PublicaJuan PerezNo ratings yet