You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- System Verilog TutorialDocument44 pagesSystem Verilog TutorialVishwa Shanika100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Monte Carlo Option Pricing: Victor Podlozhnyuk Mark HarrisDocument15 pagesMonte Carlo Option Pricing: Victor Podlozhnyuk Mark HarrisVishwa ShanikaNo ratings yet
- User ThreadingDocument23 pagesUser ThreadingVishwa ShanikaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
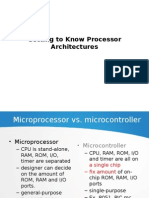
- Getting To Know Processor ArchitecturesDocument27 pagesGetting To Know Processor ArchitecturesVishwa ShanikaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Flexcache: Field Extensible Cache Controller Architecture Using On-Chip Reconfigurable FabricDocument8 pagesFlexcache: Field Extensible Cache Controller Architecture Using On-Chip Reconfigurable FabricVishwa ShanikaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- C Mod RMDocument3 pagesC Mod RMVishwa ShanikaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- CummingsICU1997 VerilogCodingEfficiencyDocument13 pagesCummingsICU1997 VerilogCodingEfficiencyNitu VlsiNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- 19 Vga PDFDocument8 pages19 Vga PDFPauloConstantinoNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Cache Project (12!09!10)Document9 pagesCache Project (12!09!10)Vishwa ShanikaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Instruction Set Architecture: From Source To Assembly CodeDocument6 pagesInstruction Set Architecture: From Source To Assembly CodeVishwa Shanika100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Chapter 4, The Microarchitecture Level: 1 of 13 ECE 357Document13 pagesChapter 4, The Microarchitecture Level: 1 of 13 ECE 357Vishwa ShanikaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Handbook 2007Document73 pagesHandbook 2007Vishwa ShanikaNo ratings yet
- Experimental and Numerical Analyses of The Steady Flow Field Around An Aortic BJT) Rk-Shiley Standard Valve ProsthesisDocument10 pagesExperimental and Numerical Analyses of The Steady Flow Field Around An Aortic BJT) Rk-Shiley Standard Valve ProsthesisVishwa ShanikaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Codigo de Errores HPDocument34 pagesCodigo de Errores HPAndrés Felipe Buitrago CatañoNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 03 DCS Architecture Software CommunicationDocument5 pages03 DCS Architecture Software CommunicationJOSEPH LORENZ RODRIGUEZNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Getting Started With FX2LPDocument28 pagesGetting Started With FX2LPFaveOfTheSunNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Aironet340 Jornada720Document6 pagesAironet340 Jornada720meolo2002No ratings yet
- Minimum 15 To 20 Points Covering Complete Topics in That UnitDocument15 pagesMinimum 15 To 20 Points Covering Complete Topics in That UnitSaikumar VskNo ratings yet
- NX5850 - User ManualDocument152 pagesNX5850 - User ManualStefanoViganóNo ratings yet
- Fire-Lite Panels Suggested Firmware Upgrade: Fire-Lite Alarms - One Fire-Lite Place, Northford, CT 06472Document1 pageFire-Lite Panels Suggested Firmware Upgrade: Fire-Lite Alarms - One Fire-Lite Place, Northford, CT 06472Christopher DaMatta BarbosaNo ratings yet
- Impulse 7000DP Upgrade: Instruction SheetDocument1 pageImpulse 7000DP Upgrade: Instruction SheetJosemar MedeirosNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Manual Led PanelDocument72 pagesManual Led PanelНиколай филюкNo ratings yet
- MC5 User GuideDocument17 pagesMC5 User GuidejosehNo ratings yet
- PMID901 BN06.01.003.015.01 Firmware Upgrade Guide 4.0v1 - OTADocument7 pagesPMID901 BN06.01.003.015.01 Firmware Upgrade Guide 4.0v1 - OTAWilgen GarciaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Dell ListDocument6 pagesDell ListJaime RiosNo ratings yet
- SeaChest LiteDocument31 pagesSeaChest LiteAlexandru CiobanuNo ratings yet
- Debug 1214Document4 pagesDebug 1214Komink SubanaNo ratings yet
- User Manual Phase Tools Release 9.1 Doc. 48000000002 - ENGDocument60 pagesUser Manual Phase Tools Release 9.1 Doc. 48000000002 - ENGtrutleptNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Replace A Faulty FMOD On ExadataDocument6 pagesReplace A Faulty FMOD On ExadataThu Thủy Đào ThịNo ratings yet
- Rta Fousb Mon Users ManualDocument28 pagesRta Fousb Mon Users ManualConduraru Alina100% (1)
- Ronin-M+Release Notes enDocument8 pagesRonin-M+Release Notes enhawksharco2No ratings yet
- Debug 1214 of ThemDocument19 pagesDebug 1214 of ThemSanjuDasNo ratings yet
- Software Review QuestionsDocument10 pagesSoftware Review Questions青木ケイNo ratings yet
- Prusa3d Manual Mmu2s enDocument45 pagesPrusa3d Manual Mmu2s enBruno InuggiNo ratings yet
- Debug 1214Document4 pagesDebug 1214Firaz Kaot'zNo ratings yet
- 1 - TM 1703 ACP SystemDataSheet - enDocument30 pages1 - TM 1703 ACP SystemDataSheet - enConstantin Ninov100% (1)
- Obsolete: Cheetah Tracker User'S GuideDocument69 pagesObsolete: Cheetah Tracker User'S GuideErnesto OtazuNo ratings yet
- JunoT41 Juno5 Slate WEH6-5 RelNotes 32159Document6 pagesJunoT41 Juno5 Slate WEH6-5 RelNotes 32159Levi StrausNo ratings yet
- Debug 1214Document4 pagesDebug 1214Hafiz NaimNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Inkjet 2600 Error CodesDocument1 pageInkjet 2600 Error CodesDean StaceyNo ratings yet
- Are You Getting Error 19 and Not Able T... CK Huawei E5573 Router - RouterUnlockDocument5 pagesAre You Getting Error 19 and Not Able T... CK Huawei E5573 Router - RouterUnlocknelkon7No ratings yet
- Android TUT Incl. How To Hack WifiDocument11 pagesAndroid TUT Incl. How To Hack WifiNullumCrimen NullumPoena SineLegeNo ratings yet
- Axxion Amp-410 Im EngDocument18 pagesAxxion Amp-410 Im EngqqluqqNo ratings yet