You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Preterm Human Milk Composition A Systematic Literature ReviewDocument13 pagesPreterm Human Milk Composition A Systematic Literature ReviewpuhumightNo ratings yet
- MJIRI v19n4p319 enDocument4 pagesMJIRI v19n4p319 enpuhumightNo ratings yet
- Diagnosis On A Principle PDFDocument69 pagesDiagnosis On A Principle PDFpuhumightNo ratings yet
- Decision Support System For Fault Isolation of JAS 39 Gripen PDFDocument71 pagesDecision Support System For Fault Isolation of JAS 39 Gripen PDFpuhumightNo ratings yet
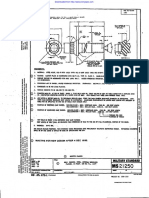
- MILITARY BOLT SPECIFICATIONDocument3 pagesMILITARY BOLT SPECIFICATIONRubén Darío Becerra GalindoNo ratings yet
- 211799Document12 pages211799puhumightNo ratings yet
- Foolishness Without Consequence? From Physical To Virtual Modeling in The History of Military Aircraft Development at SaabDocument19 pagesFoolishness Without Consequence? From Physical To Virtual Modeling in The History of Military Aircraft Development at SaabpuhumightNo ratings yet
- Titanium and Its Alloys: Metallurgy, Heat Treatment and Alloy CharacteristicsDocument13 pagesTitanium and Its Alloys: Metallurgy, Heat Treatment and Alloy CharacteristicsBruna GomesNo ratings yet
- Epilepsia - 2011 - Cendes - Vaccinations and Febrile SeizuresDocument3 pagesEpilepsia - 2011 - Cendes - Vaccinations and Febrile SeizurespuhumightNo ratings yet
- Distribution of Cooling To Avionics PDFDocument76 pagesDistribution of Cooling To Avionics PDFpuhumightNo ratings yet
- Diagnosis of The Air Distribution System of The JAS39 Gripen Environmental Control SystemDocument59 pagesDiagnosis of The Air Distribution System of The JAS39 Gripen Environmental Control SystempuhumightNo ratings yet
- Development of Integrated Functional Monitoring and Warnings System For Saab 39 GripenDocument7 pagesDevelopment of Integrated Functional Monitoring and Warnings System For Saab 39 GripenpuhumightNo ratings yet
- M-346 Flight Test ProgrammeDocument10 pagesM-346 Flight Test ProgrammecoralonsoNo ratings yet
- IAI - LAVI Fighter Evolution: Ovadia Harari Memorial LectureDocument1 pageIAI - LAVI Fighter Evolution: Ovadia Harari Memorial LecturepuhumightNo ratings yet
- Aermacchi M-346FA The Fighter AttackDocument12 pagesAermacchi M-346FA The Fighter AttackpuhumightNo ratings yet
- Moog AG M-346 Brochure Mar15Document4 pagesMoog AG M-346 Brochure Mar15puhumightNo ratings yet
- New Configurations For The Windshield and The Canopy For A Two-Seater Trainer Military AircraftDocument8 pagesNew Configurations For The Windshield and The Canopy For A Two-Seater Trainer Military AircraftpuhumightNo ratings yet
- M-346 Advanced Trainer's Early Test Flights Achieve MilestonesDocument12 pagesM-346 Advanced Trainer's Early Test Flights Achieve MilestonespuhumightNo ratings yet
- Concept Definition: A Historical Perspective: (Based On A-10 Systems Engineering Case Study)Document22 pagesConcept Definition: A Historical Perspective: (Based On A-10 Systems Engineering Case Study)puhumightNo ratings yet
- T-6A Texan II Systems Engineering Case StudyDocument88 pagesT-6A Texan II Systems Engineering Case StudypuhumightNo ratings yet
- Aeroelastic Test and ValidationDocument21 pagesAeroelastic Test and ValidationpuhumightNo ratings yet
- Air Force Institute of Technology: Improving The Upt Student Follow-On Assignment Selection ProcessDocument91 pagesAir Force Institute of Technology: Improving The Upt Student Follow-On Assignment Selection ProcesspuhumightNo ratings yet
- ftft-OIO-ifc?: An Investigation of F/A-l 8 AMAD Gearbox Driveshaft VibrationDocument101 pagesftft-OIO-ifc?: An Investigation of F/A-l 8 AMAD Gearbox Driveshaft VibrationpuhumightNo ratings yet
- Eads (Dasa) At-2000 MakoDocument8 pagesEads (Dasa) At-2000 MakopuhumightNo ratings yet
- Active content manual physics chapter measurementsDocument57 pagesActive content manual physics chapter measurementspuhumightNo ratings yet
- Quiz Sistemas de AeronavesDocument23 pagesQuiz Sistemas de AeronavesAllain CelyNo ratings yet
- F-22A Lightweight Gun System Comparison: NDIA Gun and Missile Systems Conference & ExhibitionDocument17 pagesF-22A Lightweight Gun System Comparison: NDIA Gun and Missile Systems Conference & ExhibitionpuhumightNo ratings yet
- Aircraft Active Flutter Suppression: State of The Art and Technology Maturation NeedsDocument41 pagesAircraft Active Flutter Suppression: State of The Art and Technology Maturation NeedspuhumightNo ratings yet
- Aerodynamic Model Tests of Exhaust Augmentors for F/A-18 EngineDocument29 pagesAerodynamic Model Tests of Exhaust Augmentors for F/A-18 EnginepuhumightNo ratings yet
- Active content manual physics chapter measurementsDocument57 pagesActive content manual physics chapter measurementspuhumightNo ratings yet