You might also like
- Ch17 Curve FittingDocument44 pagesCh17 Curve FittingSandip GaikwadNo ratings yet
- Time Series Analysis Exercises: Universität PotsdamDocument30 pagesTime Series Analysis Exercises: Universität PotsdamSD100% (1)
- CobolDocument224 pagesCobolrahulravi007No ratings yet
- GX-2009 - Personal Multigas Detector. Operator's Manual (RKI, 2009)Document64 pagesGX-2009 - Personal Multigas Detector. Operator's Manual (RKI, 2009)Stasio80No ratings yet
- Sixty Years of Research On Ship Rudders Effects of Design Choices On Rudder Performance PDFDocument19 pagesSixty Years of Research On Ship Rudders Effects of Design Choices On Rudder Performance PDFSunil100% (1)
- Admix Load CellDocument6 pagesAdmix Load Cellmanil_5No ratings yet
- PVC PLasticisersDocument2 pagesPVC PLasticisersKrishna PrasadNo ratings yet
- Appliance ShipmentsDocument10 pagesAppliance ShipmentsnNo ratings yet
- Introduction To Oracle GroovyDocument53 pagesIntroduction To Oracle GroovyDeepak BhagatNo ratings yet
- Examen Econometrie Ghirba AnaDocument7 pagesExamen Econometrie Ghirba AnaPetru SiretanuNo ratings yet
- Dynamic Modeling of GE 1.5 andDocument31 pagesDynamic Modeling of GE 1.5 andErtuğrul ÇamNo ratings yet
- Curtis CatalogDocument9 pagesCurtis CatalogtharngalNo ratings yet
- Control ReportDocument15 pagesControl ReportKenshow Large50% (2)
- GL Setup ListDocument88 pagesGL Setup ListSundaroraclefinNo ratings yet
- Fem Project 1Document11 pagesFem Project 1Mainak SarkarNo ratings yet
- Fuzzy Lab#1 Udara VER 2Document13 pagesFuzzy Lab#1 Udara VER 2Yudara AlmeidaNo ratings yet
- Solutions Chapter6Document19 pagesSolutions Chapter6Zodwa MngometuluNo ratings yet
- Solutions Chapter6Document19 pagesSolutions Chapter6yitagesu eshetuNo ratings yet
- Orbital Mechanics MATLAB FunctionsDocument82 pagesOrbital Mechanics MATLAB FunctionsSnehalagoo LagooNo ratings yet
- Project1Report (Prakash)Document12 pagesProject1Report (Prakash)pgnepal100% (1)
- Ta Proj 1 ReportlDocument12 pagesTa Proj 1 ReportlshaheerdurraniNo ratings yet
- Bisection Method ConvergenceDocument11 pagesBisection Method ConvergenceDl Al-azizNo ratings yet
- Seasonal AR Modelling of the S&P 500Document34 pagesSeasonal AR Modelling of the S&P 500Nilotpal AddyNo ratings yet
- Drawing Using The Scorbot Manipulator ArmDocument17 pagesDrawing Using The Scorbot Manipulator Armlfc_hotmail4253No ratings yet
- 14 - Fuzzy Pid Self TunningDocument6 pages14 - Fuzzy Pid Self TunningMayer FernandesNo ratings yet
- ODE Numerical Analysis RegionsDocument17 pagesODE Numerical Analysis RegionspsylancerNo ratings yet
- 3CL4 Lab 4 PrelabDocument7 pages3CL4 Lab 4 PrelabAhmed AllamNo ratings yet
- Lesson 4.1 - Group 1Document18 pagesLesson 4.1 - Group 1Bảo ThiênNo ratings yet
- CSD Practical MannualDocument35 pagesCSD Practical MannualitsurturnNo ratings yet
- Bivariate Regression AnalysisDocument15 pagesBivariate Regression AnalysisCarmichael MarlinNo ratings yet
- R0004e - 2022 08 24Document8 pagesR0004e - 2022 08 24Felix WoxblomNo ratings yet
- Curve fitting techniques for data interpolationDocument44 pagesCurve fitting techniques for data interpolationHector Ledesma IIINo ratings yet
- Solved Problems: SolutionDocument30 pagesSolved Problems: SolutionLucky DeltaNo ratings yet
- SplinesDocument17 pagesSplinesgeojm4155No ratings yet
- Isye4031 Regression and Forecasting Practice Problems 2 Fall 2014Document5 pagesIsye4031 Regression and Forecasting Practice Problems 2 Fall 2014cthunder_1No ratings yet
- ENGR 351 Numerical Methods College of Engineering Southern Illinois University Carbondale Exams Fall 2007 Instructor: Professor L.R. ChevalierDocument13 pagesENGR 351 Numerical Methods College of Engineering Southern Illinois University Carbondale Exams Fall 2007 Instructor: Professor L.R. ChevalierAli O DalkiNo ratings yet
- Mica Birefringence MeasurementDocument14 pagesMica Birefringence MeasurementPhanNo ratings yet
- Motilal Nehru National Institute of Technology Civil Engineering Department Least Square Regression Curve FittingDocument44 pagesMotilal Nehru National Institute of Technology Civil Engineering Department Least Square Regression Curve Fittingvarunsingh214761No ratings yet
- Geng4402 - Assignment 2: Question 1 - Nyquist Plot/Frequency Response PerformanceDocument9 pagesGeng4402 - Assignment 2: Question 1 - Nyquist Plot/Frequency Response PerformanceangelosoutiNo ratings yet
- Control Theory Project WriteupDocument13 pagesControl Theory Project WriteupElyar AiretiNo ratings yet
- PD, PI, PID Compensation TechniquesDocument42 pagesPD, PI, PID Compensation TechniquesAsghar AliNo ratings yet
- S S TF: 3. Controller Design CalculationsDocument6 pagesS S TF: 3. Controller Design CalculationsJoy MatiwaneNo ratings yet
- Scale Estimation and Keypoint Description: Li YichengDocument10 pagesScale Estimation and Keypoint Description: Li Yichengapi-303634380No ratings yet
- Méthodes Du Point Fixe: 1) Le Programme en MATLAB Du Fonction F (X)Document12 pagesMéthodes Du Point Fixe: 1) Le Programme en MATLAB Du Fonction F (X)aissa bsbNo ratings yet
- Assignment 2 - EPGCOM-10-006Document18 pagesAssignment 2 - EPGCOM-10-006Akash Kumar SuryawanshiNo ratings yet
- A Ybx: Scatter Diagram Correlation CoefficientDocument7 pagesA Ybx: Scatter Diagram Correlation CoefficientNaheed Nazneen TuLiNo ratings yet
- Report: Integral Calculations Using C++ CodeDocument8 pagesReport: Integral Calculations Using C++ CodeYosua Heru IrawanNo ratings yet
- Mathematical Modelling: 6.1 Development of A Mathematical ModelDocument9 pagesMathematical Modelling: 6.1 Development of A Mathematical ModelMahesh PatilNo ratings yet
- Multiple Linear Regression Ver1.1Document61 pagesMultiple Linear Regression Ver1.1jstadlasNo ratings yet
- 0.1 Unfolding: X (N) N y (N) X (n+1) N y (n+1)Document6 pages0.1 Unfolding: X (N) N y (N) X (n+1) N y (n+1)naras2No ratings yet
- Ee224 Laboratory 1Document8 pagesEe224 Laboratory 1Jericho RamirezNo ratings yet
- DIRECT Optimization Algorithm User GuideDocument14 pagesDIRECT Optimization Algorithm User GuideMostafa MangalNo ratings yet
- L8 Single Variable Optimization AlgorithmsDocument9 pagesL8 Single Variable Optimization AlgorithmsSudipta MaityNo ratings yet
- Applied Numerical Analysis Laboratory: Jadavpur University Department of Chemical EngineeringDocument15 pagesApplied Numerical Analysis Laboratory: Jadavpur University Department of Chemical EngineeringDebasmita KumarNo ratings yet
- Relay PID Auto TuningDocument8 pagesRelay PID Auto TuningKamran KhanNo ratings yet
- Bode and Nyquist Analysis of Proportional ControllerDocument3 pagesBode and Nyquist Analysis of Proportional Controllerdai83No ratings yet
- Matlab CodeDocument8 pagesMatlab Codesmit thummarNo ratings yet
- Solving ODEs and PDEs using MATLABDocument9 pagesSolving ODEs and PDEs using MATLABlikpataNo ratings yet
- EE 627: Term 2/2016 Homework 4 Due April 25, 2017: Solution: The Autoregressive Polynomial Can Be Factorized AsDocument4 pagesEE 627: Term 2/2016 Homework 4 Due April 25, 2017: Solution: The Autoregressive Polynomial Can Be Factorized AsluscNo ratings yet
- Econometrics Assignment 2Document3 pagesEconometrics Assignment 2Peter ChenzaNo ratings yet
- Solution: Assignment 2Document8 pagesSolution: Assignment 2Agricultural MachineryNo ratings yet
- Imp Questions For Ci - UpdateDocument8 pagesImp Questions For Ci - Updaterajeshwari64.yNo ratings yet
- Performance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemDocument5 pagesPerformance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemSanjiv CrNo ratings yet
- Lecture 11 (42-57)Document16 pagesLecture 11 (42-57)Saif AlabdullahNo ratings yet
- PID Controller Simulation and AnalysisDocument21 pagesPID Controller Simulation and Analysisamir sabrinNo ratings yet
- Advanced Numerical and Semi-Analytical Methods for Differential EquationsFrom EverandAdvanced Numerical and Semi-Analytical Methods for Differential EquationsNo ratings yet
- Miss-Able Scenes: Day OneDocument5 pagesMiss-Able Scenes: Day Onedecerto252No ratings yet
- TodoDocument2 pagesTododecerto252No ratings yet
- Green Function For Klein-Gordon-Dirac EquationDocument6 pagesGreen Function For Klein-Gordon-Dirac Equationdecerto252No ratings yet
- Am J Phys 79 (2011) 877Document6 pagesAm J Phys 79 (2011) 877decerto252No ratings yet
- Many Body Lecture 3Document35 pagesMany Body Lecture 3decerto252No ratings yet
- Ma432 Classical Field Theory: Notes by Chris BlairDocument34 pagesMa432 Classical Field Theory: Notes by Chris BlairPim BormanNo ratings yet
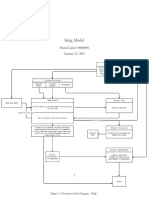
- Ising ModelDocument5 pagesIsing Modeldecerto252No ratings yet
- PhysRevE 85 051305Document17 pagesPhysRevE 85 051305decerto252No ratings yet
- Complex AnalysisDocument26 pagesComplex Analysisdecerto252No ratings yet
- hw1 Yup Der (SDocument1 pagehw1 Yup Der (Sdecerto252No ratings yet
- Linear AlgebraDocument11 pagesLinear Algebradecerto252No ratings yet
- Notes On Real AnalysisDocument158 pagesNotes On Real AnalysisPaul RyanNo ratings yet
- Shares Dan Yang Belum Diterbitkan Disebut Unissued SharesDocument5 pagesShares Dan Yang Belum Diterbitkan Disebut Unissued Sharesstefanus budiNo ratings yet
- Power Cable Installation ManualDocument50 pagesPower Cable Installation ManualAnn DodsonNo ratings yet
- Geophysical Report Megnatic SurveyDocument29 pagesGeophysical Report Megnatic SurveyShahzad KhanNo ratings yet
- PresiometroDocument25 pagesPresiometrojoseprepaNo ratings yet
- GAS-INSULATED SWITCHGEAR MODELS 72kV ADVANCED ENVIRONMENTALLY FRIENDLYDocument6 pagesGAS-INSULATED SWITCHGEAR MODELS 72kV ADVANCED ENVIRONMENTALLY FRIENDLYBudi SantonyNo ratings yet
- Low-Complexity Iterative Detection For Large-Scale Multiuser MIMO-OFDM Systems Using Approximate Message PassingDocument14 pagesLow-Complexity Iterative Detection For Large-Scale Multiuser MIMO-OFDM Systems Using Approximate Message PassingNitin KumarNo ratings yet
- Algebra Translating Algebraic Phrases 001Document2 pagesAlgebra Translating Algebraic Phrases 001crazyomnislash25% (4)
- College of Information Technology Dmmmsu-Mluc City of San FernandoDocument9 pagesCollege of Information Technology Dmmmsu-Mluc City of San FernandoZoilo BagtangNo ratings yet
- LyonDCCT Technology ReviewDocument4 pagesLyonDCCT Technology Reviewrajagopal gNo ratings yet
- Inferential Statistics: Estimation and Confidence IntervalsDocument19 pagesInferential Statistics: Estimation and Confidence IntervalsHasan HubailNo ratings yet
- UG WeibullDocument776 pagesUG WeibullCharles GuzmanNo ratings yet
- c1Document19 pagesc1vgnagaNo ratings yet
- FTP FUNCTION MODULE in ABAPDocument8 pagesFTP FUNCTION MODULE in ABAPAdriano PermanaNo ratings yet
- Hot Rolled Sheet Pile SHZ Catalogue PDFDocument2 pagesHot Rolled Sheet Pile SHZ Catalogue PDFkiet eelNo ratings yet
- Jaguar Land Rover Configuration Lifecycle Management WebDocument4 pagesJaguar Land Rover Configuration Lifecycle Management WebStar Nair Rock0% (1)
- Indian Standards List As On Jan2009Document216 pagesIndian Standards List As On Jan2009Vasudeva Pavan VemuriNo ratings yet
- MleplustutorialDocument13 pagesMleplustutorialvorge daoNo ratings yet
- Enzyme Inhibition and ToxicityDocument12 pagesEnzyme Inhibition and ToxicityDaniel OmolewaNo ratings yet
- Lsantos - Reflecting Writing For Optimization ProjectDocument2 pagesLsantos - Reflecting Writing For Optimization Projectapi-341418797No ratings yet
- Ain 2016 Pilot Report m600Document4 pagesAin 2016 Pilot Report m600Antonio Cesar de Sa LeitaoNo ratings yet