You might also like
- Fourier SeriesDocument74 pagesFourier SeriesBurhan KhanNo ratings yet
- TS1860 Developing A Wind Turbine Condition Monitoring System PDFDocument28 pagesTS1860 Developing A Wind Turbine Condition Monitoring System PDFBurhan KhanNo ratings yet
- PDFDocument50 pagesPDFBurhan KhanNo ratings yet
- Industrial Automation Instrumentation Sensors ActorsDocument61 pagesIndustrial Automation Instrumentation Sensors ActorsBurhan KhanNo ratings yet
- Business Plan, Paper Recycling PlantDocument22 pagesBusiness Plan, Paper Recycling PlantSucesor66650% (4)
- 2010 Poco Tutorial Conf Proceedings PDFDocument28 pages2010 Poco Tutorial Conf Proceedings PDFBurhan KhanNo ratings yet
- PID ControlDocument71 pagesPID ControlFelix LaraNo ratings yet
- Why Nikola Tesla Was The Greatest Geek Who Ever Lived - The Oatmeal PDFDocument17 pagesWhy Nikola Tesla Was The Greatest Geek Who Ever Lived - The Oatmeal PDFBurhan KhanNo ratings yet
- Plant Wide ControlDocument108 pagesPlant Wide ControlBurhan KhanNo ratings yet
- Software and Codes For Analysis of CSP TechnologiesDocument35 pagesSoftware and Codes For Analysis of CSP TechnologiesAndres MonteroNo ratings yet
- Optimized PSTN Oct 05Document47 pagesOptimized PSTN Oct 05Burhan KhanNo ratings yet
- Ocean Energy TechnologiesDocument27 pagesOcean Energy TechnologiesArik AprilliyantoNo ratings yet
- Pak WindDocument1 pagePak WindBurhan KhanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cleaning Krisbow 2013 (Low Res) 2Document12 pagesCleaning Krisbow 2013 (Low Res) 2Andres Agung PerdanaNo ratings yet
- NVF5Document16 pagesNVF5Juan LobosNo ratings yet
- NV 24 Globe ActuatorDocument12 pagesNV 24 Globe ActuatorRodrigo AlvesNo ratings yet
- Explosion Proof Control Device SpecificationsDocument12 pagesExplosion Proof Control Device SpecificationsAnonymous IErc0FJNo ratings yet
- GENRE DocumentaryDocument10 pagesGENRE Documentaryemilyweal123No ratings yet
- Model 2000 Flow ComputerDocument8 pagesModel 2000 Flow ComputerAdnan SalihbegovicNo ratings yet
- Bod User ManualDocument2 pagesBod User ManualAshish VermaNo ratings yet
- Form-HSE-TMR-006 Compressor, Genzet, Water Jet InspectionDocument2 pagesForm-HSE-TMR-006 Compressor, Genzet, Water Jet Inspectionkenia infoNo ratings yet
- ROSON Dental Accessories Price List-2019Document83 pagesROSON Dental Accessories Price List-2019Anonymous XCJkPuVNo ratings yet
- Barrera BANNER 2 PDFDocument10 pagesBarrera BANNER 2 PDFrollinga2013No ratings yet
- 515 TSG PorosityDocument60 pages515 TSG Porosityripecue100% (3)
- Matriks Compressor 2023Document27 pagesMatriks Compressor 2023Puji RustantoNo ratings yet
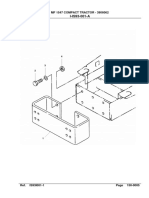
- MF1547Front Linkage - Seat PDFDocument18 pagesMF1547Front Linkage - Seat PDFAhmad Ali NursahidinNo ratings yet
- Section 3.3.4 Neutral Earthing Resistors R1Document7 pagesSection 3.3.4 Neutral Earthing Resistors R1waelabouelelaNo ratings yet
- Sni+03 6868 2002Document3 pagesSni+03 6868 2002abanghasanNo ratings yet
- DELL XPS 11 VAZ90 LA-A161P Rev 1.0 (A00) 20130814Document49 pagesDELL XPS 11 VAZ90 LA-A161P Rev 1.0 (A00) 20130814Sonel SmithNo ratings yet
- Rajib Mall Lecture NotesDocument97 pagesRajib Mall Lecture NotesAnuj Nagpal100% (1)
- cs2071 New Notes 1Document34 pagescs2071 New Notes 1intelinsideocNo ratings yet
- AGA3Document1 pageAGA3Alan BkNo ratings yet
- User's Manual: Motherboard AMD Socket AM2Document56 pagesUser's Manual: Motherboard AMD Socket AM2vagnerrock007No ratings yet
- Icest 2013 02 PDFDocument424 pagesIcest 2013 02 PDFphanduy1310No ratings yet
- Konica 7020 Error Codes: Code DescriptionDocument3 pagesKonica 7020 Error Codes: Code Descriptionsaito36No ratings yet
- Plan for Inspection and Testing of LV Power CablesDocument1 pagePlan for Inspection and Testing of LV Power CablesRami KsidaNo ratings yet
- HuskyDocument10 pagesHuskypreetimurali100% (1)
- Types of Wind Turbines - Horizontal Axis and Vertical Axis ComparedDocument1 pageTypes of Wind Turbines - Horizontal Axis and Vertical Axis Comparedmendhi123No ratings yet
- Validity Checks: Processing ControlsDocument3 pagesValidity Checks: Processing Controlsjhela18No ratings yet
- Tutorial DataGeosis Office EspañolmtdDocument205 pagesTutorial DataGeosis Office Españolmtdramm70No ratings yet
- Telepo SDK Develop Guide (Linux For TPS300) - v1.0Document10 pagesTelepo SDK Develop Guide (Linux For TPS300) - v1.0VKM2013No ratings yet
- Engineering Technical Report of The v12 Engine and Related Assignments at Tipco IncDocument36 pagesEngineering Technical Report of The v12 Engine and Related Assignments at Tipco Incapi-244817040No ratings yet
- CIRCULAR WATER TANK DESIGN-Layout1 AkhilDocument1 pageCIRCULAR WATER TANK DESIGN-Layout1 AkhilVENKAT KALYANNo ratings yet