You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ParallelDocument4 pagesParallelShanntha JoshittaNo ratings yet
- SmartForm - Invoice TutorialDocument17 pagesSmartForm - Invoice TutorialShelly McRay100% (5)
- Nina Harris Mira Soskis Thalia Ehrenpreis Stella Martin and Lily Edwards - Popper Lab Write UpDocument4 pagesNina Harris Mira Soskis Thalia Ehrenpreis Stella Martin and Lily Edwards - Popper Lab Write Upapi-648007364No ratings yet
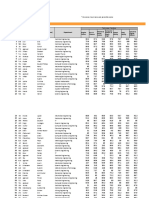
- Innoventure List of Short Listed CandidatesDocument69 pagesInnoventure List of Short Listed CandidatesgovindmalhotraNo ratings yet
- Interview Call Letter - DR K R SwaroopDocument2 pagesInterview Call Letter - DR K R SwaroopDr-Swaroop KRNo ratings yet
- Diamondfreezemel32r E82eenDocument11 pagesDiamondfreezemel32r E82eenGILI RELIABILITYNo ratings yet
- 40 Years of Transit Oriented DevelopmentDocument74 pages40 Years of Transit Oriented DevelopmentTerry MaynardNo ratings yet
- VMD-412 9 April 2014Document8 pagesVMD-412 9 April 2014ashish kumarNo ratings yet
- Computer Graphics BasicsDocument3 pagesComputer Graphics BasicsBharath RNo ratings yet
- Carl Jung - CW 18 Symbolic Life AbstractsDocument50 pagesCarl Jung - CW 18 Symbolic Life AbstractsReni DimitrovaNo ratings yet
- Manhunt!: Adventure Creation HandbookDocument17 pagesManhunt!: Adventure Creation Handbookmadcap01No ratings yet
- CT Analyzer Whats New V4 52 ENUDocument6 pagesCT Analyzer Whats New V4 52 ENUSivakumar NatarajanNo ratings yet
- Poznan University Brochure 04-05 KwalifikacjeDocument2 pagesPoznan University Brochure 04-05 KwalifikacjeRiaz CarzNo ratings yet
- Titanic Is A 1997 American Romantic Disaster Film Directed, Written. CoDocument13 pagesTitanic Is A 1997 American Romantic Disaster Film Directed, Written. CoJeric YutilaNo ratings yet
- Things To Remember When Writing Your Conference Proposal AbstractDocument2 pagesThings To Remember When Writing Your Conference Proposal AbstractBalizkoa BadaezpadakoaNo ratings yet
- O.E.Lab - Docx For Direct Shear TestDocument14 pagesO.E.Lab - Docx For Direct Shear TestAmirah SyakiraNo ratings yet
- Barthes EiffelTower PDFDocument21 pagesBarthes EiffelTower PDFegr1971No ratings yet
- Water TableDocument5 pagesWater TableJay DoshiNo ratings yet
- Gender Portrayals and Stereotypes in Kabit-Themed Shows:a Content AnalysisDocument11 pagesGender Portrayals and Stereotypes in Kabit-Themed Shows:a Content AnalysisRichard Webb100% (2)
- PV Quick StartDocument61 pagesPV Quick StartMayur PatelNo ratings yet
- Design of Power Converters For Renewable Energy Sources and Electric Vehicles ChargingDocument6 pagesDesign of Power Converters For Renewable Energy Sources and Electric Vehicles ChargingRay Aavanged IINo ratings yet
- Engineering Council of South Africa: 1 PurposeDocument5 pagesEngineering Council of South Africa: 1 Purpose2lieNo ratings yet
- 5300 Operation Manual (v1.5)Document486 pages5300 Operation Manual (v1.5)Phan Quan100% (1)
- Absolute Duo 1 PDFDocument219 pagesAbsolute Duo 1 PDFAgnieškaRužičkaNo ratings yet
- Feedback For Question 1-MIDTERM 2 AFM 451Document2 pagesFeedback For Question 1-MIDTERM 2 AFM 451jason fNo ratings yet
- Yoga Nidra - Text PDFDocument265 pagesYoga Nidra - Text PDFVinod Kumar100% (1)
- Construction Manual California PDFDocument956 pagesConstruction Manual California PDFAlexander Ponce VelardeNo ratings yet
- Nursing 405 EfolioDocument5 pagesNursing 405 Efolioapi-403368398100% (1)
- DonnetDocument12 pagesDonnetAsia SzmyłaNo ratings yet
- Probability Form 4Document10 pagesProbability Form 4Deen ZakariaNo ratings yet