You might also like
- SistemasProgramables Unidad-5 CompletaDocument9 pagesSistemasProgramables Unidad-5 CompletaLuis Alejandro Escárcega FernándezNo ratings yet
- Programacion de Bajo NivelDocument12 pagesProgramacion de Bajo NivelVíctor Martínez CámaraNo ratings yet
- Romero Mendez Nelson Unidad 4 Sistemas ProgramablesDocument8 pagesRomero Mendez Nelson Unidad 4 Sistemas ProgramablesNelson Romero MéndezNo ratings yet
- Sistema EmbebidoDocument10 pagesSistema EmbebidoelpachecolNo ratings yet
- Entrenador PICDocument84 pagesEntrenador PICLuis León0% (1)
- Sistemas Embebidos en La IndustriaDocument12 pagesSistemas Embebidos en La IndustriaanderelelectronicNo ratings yet
- Tutorial ATmegaDocument17 pagesTutorial ATmegajubjub92No ratings yet
- Acceso Dispositivos 40Document9 pagesAcceso Dispositivos 40Daniel De La CerdaNo ratings yet
- Control de Motor de Pasos Con MicrocontroladorDocument3 pagesControl de Motor de Pasos Con MicrocontroladorCarlo PalacioNo ratings yet
- Introducción A Los Sistemas ProgramablesDocument7 pagesIntroducción A Los Sistemas Programablesevaob75No ratings yet
- L000071.21082014 Procedimiento para El Sistema de Inspeccion A Distancia Via Internet para La Inspeccion y Aceptacion de BienesDocument23 pagesL000071.21082014 Procedimiento para El Sistema de Inspeccion A Distancia Via Internet para La Inspeccion y Aceptacion de BienesRobert JacksonNo ratings yet
- Control motor paso bipolar ArduinoDocument4 pagesControl motor paso bipolar ArduinoJuan Carlos Hernandez MejiaNo ratings yet
- Sistema de Interconexión Interna Arbitraje y Jerarquía de Buses TerminadoDocument39 pagesSistema de Interconexión Interna Arbitraje y Jerarquía de Buses TerminadoBiviana Katherine Rivera PeraltaNo ratings yet
- Wuolah-Free-Asignatura Completa + ExamenesDocument751 pagesWuolah-Free-Asignatura Completa + ExamenesJerson Andres Quintero0% (1)
- Interfaz Tecnología ComputadorasDocument22 pagesInterfaz Tecnología ComputadorasJuan Alberto GonzalezNo ratings yet
- 4.4 Programación Del Puerto ParaleloDocument4 pages4.4 Programación Del Puerto ParaleloFrank Diaz100% (1)
- CirosRobotics 2013 I HSDocument50 pagesCirosRobotics 2013 I HSDaniel Henao SantanaNo ratings yet
- Microcontrolador 8051 interrupcionesDocument23 pagesMicrocontrolador 8051 interrupcionesElvaroNo ratings yet
- PIC16F886 Investigación CI MicrocontroladorDocument11 pagesPIC16F886 Investigación CI MicrocontroladorIsaias RiveraNo ratings yet
- Manipulacion de Puertos en Lenguaje CDocument12 pagesManipulacion de Puertos en Lenguaje CSalvador Soria SalgadoNo ratings yet
- VLSM y CIDR (Características, Implementación Y/o Configuración)Document15 pagesVLSM y CIDR (Características, Implementación Y/o Configuración)Frank Reynaldo80% (5)
- Informe SemaforoDocument9 pagesInforme SemaforoWil Fabi LaguatasigNo ratings yet
- Encoder de Velocidad Practica 2Document8 pagesEncoder de Velocidad Practica 2Daniel Alejandro SandovalNo ratings yet
- Cómo Cambiar Los Componentes de Tu PC Paso A Paso - AmayaDocument82 pagesCómo Cambiar Los Componentes de Tu PC Paso A Paso - AmayaEduardo Torres100% (1)
- Lenguajes VHDL y VerilogDocument4 pagesLenguajes VHDL y Verilogpsycobrah100% (1)
- Investigación Temario - Tema 1 MicrocontroladoresDocument21 pagesInvestigación Temario - Tema 1 MicrocontroladoresDaniel GomezNo ratings yet
- 8255 PPI: Introducción al periférico programableDocument17 pages8255 PPI: Introducción al periférico programableAliangie Valeria ZambranoNo ratings yet
- PIC C compiler guideDocument6 pagesPIC C compiler guideRodolfo VergaraNo ratings yet
- Arquitectura de Un Procesador Digital de SeñalesDocument4 pagesArquitectura de Un Procesador Digital de SeñalesFernando OsorioNo ratings yet
- Practica 2 DisplayDocument2 pagesPractica 2 DisplayKevin DavidNo ratings yet
- Display de 7 Segmentos y Contador Del 0 Al 9Document5 pagesDisplay de 7 Segmentos y Contador Del 0 Al 9Hévy PsicodeliaNo ratings yet
- HC 05 InformeDocument7 pagesHC 05 InformeGolopolla XdNo ratings yet
- Documento PLC OmronDocument18 pagesDocumento PLC OmronWilliam JoyaNo ratings yet
- Fpga y PLD, VHDL y VerilogDocument6 pagesFpga y PLD, VHDL y VerilogLuis PintadoNo ratings yet
- Tabla de Enrutamiento de Un HostDocument4 pagesTabla de Enrutamiento de Un HostAna ArribasNo ratings yet
- Problemas de paralelismo y optimización de tiempos de ejecución CAPÍTULO 7Document6 pagesProblemas de paralelismo y optimización de tiempos de ejecución CAPÍTULO 7Snaider Silvera100% (1)
- Rs 232Document3 pagesRs 232lobogris05No ratings yet
- ComSerial PIC-PC USARTDocument8 pagesComSerial PIC-PC USARTDavid Mercado BNo ratings yet
- Buses de CampoDocument8 pagesBuses de CampoGarido_Aaron_2596No ratings yet
- Modelos de Procesos de Software para Sistemas EmbebidosDocument4 pagesModelos de Procesos de Software para Sistemas EmbebidosSaroff Yataco IrrazábalNo ratings yet
- Informa Practica 3 IOTDocument13 pagesInforma Practica 3 IOTFreddy MayorgaNo ratings yet
- ConfigurarFUSESDocument9 pagesConfigurarFUSESJuan Pablo Garcia LanderoNo ratings yet
- Reporte Contador 7 SegmentosDocument14 pagesReporte Contador 7 SegmentosSergio Medina MartinezNo ratings yet
- Practica 2 Letrero ArduinoDocument18 pagesPractica 2 Letrero ArduinoVictor VicmanNo ratings yet
- Unit 2 - Clasificacion Por Estructura PLCDocument26 pagesUnit 2 - Clasificacion Por Estructura PLCJaret GarciaNo ratings yet
- MicrocontroladoresDocument12 pagesMicrocontroladoresEdwin VelasteguiNo ratings yet
- Modelo Osi (Exposicion) 1Document21 pagesModelo Osi (Exposicion) 1karlavr100% (1)
- ComponentesComputadorasUNSADocument22 pagesComponentesComputadorasUNSAHossmell VelascoNo ratings yet
- Diferencias Entre Memoria RAM y ROMDocument7 pagesDiferencias Entre Memoria RAM y ROMjuanNo ratings yet
- 5 - Comunicaciones Serial y Arduino - ArduinoDocument26 pages5 - Comunicaciones Serial y Arduino - ArduinoPaul ChiliquingaNo ratings yet
- AskDocument11 pagesAskGian ErrivaresNo ratings yet
- Microcontroladores PicDocument30 pagesMicrocontroladores PicMiguel A. FloresNo ratings yet
- Pwm2 - Control de MotorDocument4 pagesPwm2 - Control de Motorjavier_valdivia_42No ratings yet
- Microprocesadores Intel 70-90Document13 pagesMicroprocesadores Intel 70-90Daniel Antonio Urdaneta NaimNo ratings yet
- Guía laboratorio fuente de alimentación menos deDocument4 pagesGuía laboratorio fuente de alimentación menos deAlbita M. VelezNo ratings yet
- Guia Tecnica para El Desarrollo de Competencias Sistemas ProgramablesDocument89 pagesGuia Tecnica para El Desarrollo de Competencias Sistemas ProgramablesGalen MarekNo ratings yet
- Manual de Prácticas de Laboratorio - InterfacesDocument66 pagesManual de Prácticas de Laboratorio - InterfacesManuel ATNo ratings yet
- Preinforme 1Document11 pagesPreinforme 1Juan Manuel LópezNo ratings yet
- Proyecto IntegradorDocument14 pagesProyecto IntegradorSamuelNo ratings yet
- Act1 T4 VictorMendez 2BDocument21 pagesAct1 T4 VictorMendez 2BAlonso MendezNo ratings yet
- Arquitectura de Computadoras 2Document3 pagesArquitectura de Computadoras 2Aidee FierroNo ratings yet
- Ejemplos de Redes Bayesianas No.2Document20 pagesEjemplos de Redes Bayesianas No.2Andrés HernandezNo ratings yet
- SNMPDocument15 pagesSNMPAidee FierroNo ratings yet
- U2 ElaboracionDocument14 pagesU2 ElaboracionAidee FierroNo ratings yet
- Temario ConmutacionDocument1 pageTemario ConmutacionMiguel Angel RendonNo ratings yet
- Entendiendo de EIGRP PDFDocument6 pagesEntendiendo de EIGRP PDFHugohi CanalesNo ratings yet
- Unidad 4Document7 pagesUnidad 4Aidee FierroNo ratings yet
- Registros Del ProcesadorDocument3 pagesRegistros Del ProcesadorAidee FierroNo ratings yet
- Registro de 64 y 32 bits: Comparación de arquitecturasDocument2 pagesRegistro de 64 y 32 bits: Comparación de arquitecturasAidee FierroNo ratings yet
- Conclusiones 3,4 y 5Document3 pagesConclusiones 3,4 y 5Aidee FierroNo ratings yet
- Instruccions EnsambladorDocument19 pagesInstruccions EnsambladorAidee FierroNo ratings yet
- Temario ISIC-2010-224 Topicos Avanzados de ProgramacionDocument11 pagesTemario ISIC-2010-224 Topicos Avanzados de ProgramacionAidee FierroNo ratings yet
- Ecuaciones DiferencialesDocument14 pagesEcuaciones DiferencialesManuel Gutierrez JimenezNo ratings yet
- 3 4Document16 pages3 4Aidee FierroNo ratings yet
- Diferencias Con La Programación Estructurada y La Programación Orientada A ObjetosDocument2 pagesDiferencias Con La Programación Estructurada y La Programación Orientada A ObjetosAidee FierroNo ratings yet
- Cultura EmpresarialDocument6 pagesCultura EmpresarialAidee FierroNo ratings yet
- 3 4Document16 pages3 4Aidee FierroNo ratings yet
- Expresiones RegularesDocument19 pagesExpresiones Regularescarlos100% (1)
- Sistema Telefónico ConmutadoDocument10 pagesSistema Telefónico ConmutadoAidee FierroNo ratings yet
- Tecnología Orientada A ObjetosDocument3 pagesTecnología Orientada A ObjetosAidee FierroNo ratings yet
- Sumador RestadorDocument3 pagesSumador RestadorAidee FierroNo ratings yet
- Diagram ADocument1 pageDiagram AAidee FierroNo ratings yet
- Formato1 1 Diagnostico Informatico 01Document4 pagesFormato1 1 Diagnostico Informatico 01MANUELANo ratings yet
- PDF Actividad Aa7 3 Replicacion de Base de Datos - Compress PDFDocument21 pagesPDF Actividad Aa7 3 Replicacion de Base de Datos - Compress PDFnicol michel diaz herreraNo ratings yet
- Concepto y análisis del algoritmo shell sortDocument5 pagesConcepto y análisis del algoritmo shell sortJose angel RamirezNo ratings yet
- PTP 802.11Document13 pagesPTP 802.11cristianalmagroNo ratings yet
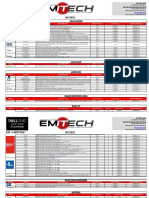
- Lista de Precios Distribuidora Emitech 03 Oct 2022Document15 pagesLista de Precios Distribuidora Emitech 03 Oct 2022hg1811No ratings yet
- HP Elitebook 2570p - Manual Del Usuario Cap-1 y 3Document22 pagesHP Elitebook 2570p - Manual Del Usuario Cap-1 y 3holguindddNo ratings yet
- Steve Jobs - Bill Gates "Mentes Brillantes"Document10 pagesSteve Jobs - Bill Gates "Mentes Brillantes"api-335671427No ratings yet
- Actividad de Repaso Tarjeta MadreDocument3 pagesActividad de Repaso Tarjeta MadreAbigay CeceñoNo ratings yet
- Hiren Bootcd Tutorial 2Document23 pagesHiren Bootcd Tutorial 2Lindsay LawsonNo ratings yet
- Registro de Windows para Usuarios Avanzados - Windows Server - Microsoft DocsDocument9 pagesRegistro de Windows para Usuarios Avanzados - Windows Server - Microsoft DocsMiguelAngelLonNo ratings yet
- Manual de Instalacion TPLinkDocument2 pagesManual de Instalacion TPLinkvmsoporteNo ratings yet
- Ficha de ComputaciónDocument2 pagesFicha de ComputaciónpuruchucoNo ratings yet
- Práctica 3 - TemporizadoresDocument10 pagesPráctica 3 - TemporizadoresRonald MejiaNo ratings yet
- Ejemplos Identificacion Clases y Casos de UsoDocument2 pagesEjemplos Identificacion Clases y Casos de UsoDavid FernandoNo ratings yet
- Manual de Usuario de Staruml RiderDocument19 pagesManual de Usuario de Staruml RiderMishael TacaNo ratings yet
- COD WWII Digital Deluxe PCDocument7 pagesCOD WWII Digital Deluxe PCDaniel GarciaNo ratings yet
- Generalidades de PC SDocument9 pagesGeneralidades de PC SElvis WilliamsNo ratings yet
- Esquema - ComunicacionDocument1 pageEsquema - Comunicaciontecnico.genersaNo ratings yet
- Aca 1 Redes 1Document8 pagesAca 1 Redes 1Maria ArteagaNo ratings yet
- Programacion en PythonDocument261 pagesProgramacion en PythonJuank Pablo100% (10)
- Magis 4Document9 pagesMagis 4ArmandoNo ratings yet
- Cambio de Denominaciones MultivendorDocument6 pagesCambio de Denominaciones MultivendorJosue NavaNo ratings yet
- Guardar Un Proyecto - Project - OfficeDocument3 pagesGuardar Un Proyecto - Project - OfficeChipi BrugaNo ratings yet
- GlosarioDocument6 pagesGlosarioErnesto HernándezNo ratings yet
- Lexmark 2400Document192 pagesLexmark 2400Jose Yesid BocanegraNo ratings yet
- Manual de Usuario Monitor de Signos Vitales Drager Vista 120Document6 pagesManual de Usuario Monitor de Signos Vitales Drager Vista 120Ignacio Rafael Anaya Padilla0% (1)
- 1.3.1.2 Lab - Building A Simple NetworkDocument7 pages1.3.1.2 Lab - Building A Simple NetworkAshby GonzalezNo ratings yet
- Evaluacion Formatos de ArchivosDocument3 pagesEvaluacion Formatos de ArchivosApostillar En SantanderNo ratings yet
- Ejercicios Del LibroDocument11 pagesEjercicios Del LibroemmgoncalNo ratings yet
- Windows 7 ReporteDocument6 pagesWindows 7 ReportemiguelNo ratings yet