You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- High Frequency Power Transformers - Design A High-Frequency Power Transformer Based On Flyback TopologyDocument6 pagesHigh Frequency Power Transformers - Design A High-Frequency Power Transformer Based On Flyback TopologyShyam Bin JamilNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- CAN PROTOCOL OVERVIEWDocument63 pagesCAN PROTOCOL OVERVIEWBijaya Rana67% (3)
- Accuracy Inspection Equipment CNCDocument36 pagesAccuracy Inspection Equipment CNCjimmy_bikerNo ratings yet
- Lab E1 RLC Circuit 1Document11 pagesLab E1 RLC Circuit 1Ching Wai Yong100% (1)
- IEC Short Circuit CalculationDocument16 pagesIEC Short Circuit CalculationJoselito Vaca50% (2)
- Fanuc Intro UpDocument112 pagesFanuc Intro UpSakalrobo100% (2)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Case Studies On Grid Collapse1Document69 pagesCase Studies On Grid Collapse1Arijit MajumdarNo ratings yet
- Stator Winding Induction Motor in The EMTPDocument8 pagesStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNo ratings yet
- Calculation of Short-Circuit IEC 60909Document6 pagesCalculation of Short-Circuit IEC 60909Iuliu Grad86% (7)
- Modeling, Simulation and Control of D-Statcom Using Atp/EmtpDocument4 pagesModeling, Simulation and Control of D-Statcom Using Atp/EmtpKalyan SrinivasNo ratings yet
- 2007 KJ Liberty ManualDocument417 pages2007 KJ Liberty Manualcarlos100% (1)
- RLC Circuit Analysis: Measuring Voltage and Current in Series and Parallel RCL ConfigurationsDocument11 pagesRLC Circuit Analysis: Measuring Voltage and Current in Series and Parallel RCL ConfigurationsChing Wai Yong100% (1)
- Impulse Current Testing According IECDocument7 pagesImpulse Current Testing According IECscribdquy100% (2)
- Power Electronics Slides and Notes DC ConvertersDocument40 pagesPower Electronics Slides and Notes DC ConvertersAnoop MathewNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- MMMZ MZT PDFDocument14 pagesMMMZ MZT PDFMartin MeiNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- 01 Effects of Very Fast Transient OvervoltagesDocument6 pages01 Effects of Very Fast Transient Overvoltagespreddyrk100% (1)
- IEEE Power System Paper-Investigation of Voltage Regulation Stability of Static Synchronous CompensatorDocument6 pagesIEEE Power System Paper-Investigation of Voltage Regulation Stability of Static Synchronous CompensatorAnoop MathewNo ratings yet
- The International Conference On Renewable Energies: "ICRE-2010"Document30 pagesThe International Conference On Renewable Energies: "ICRE-2010"M VetriselviNo ratings yet
- A Control Method For SVPWM-based STATCOMDocument6 pagesA Control Method For SVPWM-based STATCOMJothsna PraveenaNo ratings yet
- EMC in Inverter-Fed Induction Motor DrivesDocument6 pagesEMC in Inverter-Fed Induction Motor DrivesIoan ŢileaNo ratings yet
- Dimensioning Program Iposim (Igbt Power Simulation) For Loss and Thermal Calculation of Eupec BSM and Ihm / Ihv ModulesDocument7 pagesDimensioning Program Iposim (Igbt Power Simulation) For Loss and Thermal Calculation of Eupec BSM and Ihm / Ihv Modulesthienvuong90No ratings yet
- Power Electronics Exam 2017 SolutionsDocument13 pagesPower Electronics Exam 2017 SolutionsBakri BugaNo ratings yet
- Influences of Excitation Systems On The Dynamic Voltage Behavior of Power SystemsDocument8 pagesInfluences of Excitation Systems On The Dynamic Voltage Behavior of Power SystemsJimmy Tacca ApazaNo ratings yet
- IEEE Power System Paper-Analysis of Power System Linearized Model With STATCOM Based Damping StabilizerDocument7 pagesIEEE Power System Paper-Analysis of Power System Linearized Model With STATCOM Based Damping StabilizerAnoop MathewNo ratings yet
- Fast, Faster, Fastest!: Optimized Diodes For Switching ApplicationsDocument3 pagesFast, Faster, Fastest!: Optimized Diodes For Switching ApplicationsSrinivasa Rao PottaNo ratings yet
- An436 Application NoteDocument9 pagesAn436 Application NoteEdgar MuñozNo ratings yet
- Control and Performance of A Medium-Voltage Cascade H-Bridge STATCOMDocument5 pagesControl and Performance of A Medium-Voltage Cascade H-Bridge STATCOMvinay kumarNo ratings yet
- BT21EE013.Assignment 1Document8 pagesBT21EE013.Assignment 1BT21EE013 PratimaNo ratings yet
- 2012-MS0EE095 - PaperDocument5 pages2012-MS0EE095 - PaperTalha MehmoodNo ratings yet
- PSCAD-Based Modeling and Flicker Estimation For Wind TurbinesDocument7 pagesPSCAD-Based Modeling and Flicker Estimation For Wind TurbinestunghtdNo ratings yet
- Ahmad ProjDocument11 pagesAhmad ProjSaifNo ratings yet
- Class e InverterDocument7 pagesClass e InverterskLam321No ratings yet
- Why There Is No Igbt Traction RectifiersDocument9 pagesWhy There Is No Igbt Traction RectifiersLaurence MichaelNo ratings yet
- 5SYA 2020-02 Feb 08 Design of RC-CircuitsDocument14 pages5SYA 2020-02 Feb 08 Design of RC-Circuitsleo232No ratings yet
- Computer Model of The Secondary Arc in Single Phase Operation of TLDocument10 pagesComputer Model of The Secondary Arc in Single Phase Operation of TLCarlos Lino Rojas AgüeroNo ratings yet
- Microcontrollers ApplicationDocument7 pagesMicrocontrollers Applicationer_ravi5No ratings yet
- Practice Report 8: Silicon Controlled RectifierDocument5 pagesPractice Report 8: Silicon Controlled RectifierTecnicoItcaNo ratings yet
- Research Inventy: International Journal of Engineering and ScienceDocument8 pagesResearch Inventy: International Journal of Engineering and ScienceinventyNo ratings yet
- Exp No 1Document9 pagesExp No 1arooj aslamNo ratings yet
- Ac Phase Firing Circuit Using MicrocontrollerDocument6 pagesAc Phase Firing Circuit Using MicrocontrollerHarsh Vardhan Singh TomarNo ratings yet
- IEEE Power System Paper-An Improved StatCom Model For Power Flow AnalysisDocument6 pagesIEEE Power System Paper-An Improved StatCom Model For Power Flow AnalysisAnoop MathewNo ratings yet
- PLC Based Load Sharing On Slide ShareDocument28 pagesPLC Based Load Sharing On Slide ShareHemu Bhai PatelNo ratings yet
- Application of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965Document6 pagesApplication of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965new7677100% (1)
- Modeling and Simulation of A Three-Phase Inverter With Rectifier-Type Nonlinear LoadsDocument10 pagesModeling and Simulation of A Three-Phase Inverter With Rectifier-Type Nonlinear LoadsTuấn DũngNo ratings yet
- A New Control Scheme of A Cascaded Transformer Type Multilevel PWM Inverter For A Residential Photovoltaic Power Conditioning SystemDocument12 pagesA New Control Scheme of A Cascaded Transformer Type Multilevel PWM Inverter For A Residential Photovoltaic Power Conditioning Systemmj5995No ratings yet
- Oos and TorsionDocument14 pagesOos and TorsionlisusedNo ratings yet
- Final ProjectDocument10 pagesFinal Projectapi-271770058No ratings yet
- UPS SystemDocument4 pagesUPS Systemमृत्युंजय झाNo ratings yet
- High-Swing, High-Impedance MOS Cascode Circuit: I. (OBC) ForDocument10 pagesHigh-Swing, High-Impedance MOS Cascode Circuit: I. (OBC) ForBodhayan PrasadNo ratings yet
- Petrochemical Transformer: SEL-787 Transformer Differential Current TripDocument4 pagesPetrochemical Transformer: SEL-787 Transformer Differential Current TripbalaelectNo ratings yet
- Inverter - Fault Current Contribution PDFDocument6 pagesInverter - Fault Current Contribution PDFbalaeee123No ratings yet
- 3.6 The Design of Harmonic Filter and Reactive Power Compensation in Power Supply SystemDocument5 pages3.6 The Design of Harmonic Filter and Reactive Power Compensation in Power Supply SystemLong LeoNo ratings yet
- PWM Technical InformationDocument9 pagesPWM Technical InformationKumaran ChakravarthyNo ratings yet
- Analysis, Design and Implementation of An Active Clamp Flyback Converter PDFDocument6 pagesAnalysis, Design and Implementation of An Active Clamp Flyback Converter PDFDeniz UzelNo ratings yet
- Multi Level Statcom For Harmonic ReductionDocument8 pagesMulti Level Statcom For Harmonic ReductionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Wcecs2009 - pp545-549 Computer LoadsDocument5 pagesWcecs2009 - pp545-549 Computer LoadsYogesh MsdNo ratings yet
- The Distribution STATCOM For Reducing The Effect of Voltage Sag SwellDocument6 pagesThe Distribution STATCOM For Reducing The Effect of Voltage Sag SwellSavreet OttalNo ratings yet
- Äñ Æ÷Éè Æ Ó ©Document6 pagesÄñ Æ÷Éè Æ Ó ©Rachel RowlandNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Artsenz Biz PlanDocument1 pageArtsenz Biz PlanAnoop MathewNo ratings yet
- JournalDocument2 pagesJournalAnoop MathewNo ratings yet
- ApplicationDocument4 pagesApplicationAnoop MathewNo ratings yet
- Application For Empanelment of Real Estate AgenciesDocument1 pageApplication For Empanelment of Real Estate AgenciesAnoop MathewNo ratings yet
- DC Machine Armature Reaction and CommutationDocument4 pagesDC Machine Armature Reaction and CommutationAnoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch27Document24 pagesPower Electronics Ned Mohan Slides Ch27Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch30Document48 pagesPower Electronics Ned Mohan Slides Ch30Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch26Document44 pagesPower Electronics Ned Mohan Slides Ch26Anoop MathewNo ratings yet
- 1) List of Important Details (Indian LLP)Document4 pages1) List of Important Details (Indian LLP)Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch28Document26 pagesPower Electronics Ned Mohan Slides Ch28Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch29Document12 pagesPower Electronics Ned Mohan Slides Ch29Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch25Document17 pagesPower Electronics Ned Mohan Slides Ch25Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch21Document27 pagesPower Electronics Ned Mohan Slides Ch21Anoop MathewNo ratings yet
- Thyristors (SCRS) : Lecture NotesDocument14 pagesThyristors (SCRS) : Lecture NotesBeverly PamanNo ratings yet
- Power Electronics Ned Mohan Slides Ch22Document35 pagesPower Electronics Ned Mohan Slides Ch22Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch28Document26 pagesPower Electronics Ned Mohan Slides Ch28Anoop MathewNo ratings yet
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesDocument7 pagesGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanNo ratings yet
- Electric Utility Applications: - These Applications Are Growing RapidlyDocument18 pagesElectric Utility Applications: - These Applications Are Growing Rapidlyapi-3705260No ratings yet
- Power Electronics Ned Mohan Slides Ch19Document17 pagesPower Electronics Ned Mohan Slides Ch19Anoop MathewNo ratings yet
- CH 20Document27 pagesCH 20avi013No ratings yet
- Power Electronics Ned Mohan Slides Ch29Document12 pagesPower Electronics Ned Mohan Slides Ch29Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch27Document24 pagesPower Electronics Ned Mohan Slides Ch27Anoop MathewNo ratings yet
- Utility Interface: - Power Quality Has Become An Important IssueDocument20 pagesUtility Interface: - Power Quality Has Become An Important Issueapi-3705260No ratings yet
- Residential and Industrial Applications: - Significant in Energy Conservation ProductivityDocument11 pagesResidential and Industrial Applications: - Significant in Energy Conservation Productivityapi-3705260No ratings yet
- Power Electronics Ned Mohan Slides Ch30Document48 pagesPower Electronics Ned Mohan Slides Ch30Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch1Document12 pagesPower Electronics Ned Mohan Slides Ch1Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch26Document44 pagesPower Electronics Ned Mohan Slides Ch26Anoop MathewNo ratings yet
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesDocument7 pagesGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanNo ratings yet
- Power Electronics Ned Mohan Slides Ch25Document17 pagesPower Electronics Ned Mohan Slides Ch25Anoop MathewNo ratings yet
- RRU3959 Description (2100 MHZ)Document13 pagesRRU3959 Description (2100 MHZ)ShahzaibAshraf100% (2)
- Honeywell DR45ATDocument314 pagesHoneywell DR45ATDavid MoleroNo ratings yet
- Lc320wun SCB1Document44 pagesLc320wun SCB1fingersoundNo ratings yet
- CT Test ReportDocument5 pagesCT Test ReportDaniel CabasaNo ratings yet
- Bidirectional DC-DC Converter With Full-Bridge / Push-Pull Circuit For Automobile Electric Power SystemsDocument5 pagesBidirectional DC-DC Converter With Full-Bridge / Push-Pull Circuit For Automobile Electric Power SystemsPaulo UchihaNo ratings yet
- Cerberus 20 PRO ModularDocument6 pagesCerberus 20 PRO ModularFrancisco RamirezNo ratings yet
- GSM Based Car Security System: Sandeep Goyal Suhail Mehta Shwetank Panwar SonuDocument19 pagesGSM Based Car Security System: Sandeep Goyal Suhail Mehta Shwetank Panwar SonuSuhail MehtaNo ratings yet
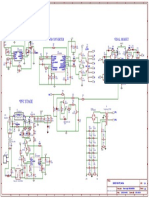
- Schematic SMPS-PFC Sheet-1 20190424001902 PDFDocument1 pageSchematic SMPS-PFC Sheet-1 20190424001902 PDFАлексей АндрияшNo ratings yet
- How to prepare firmwareDocument5 pagesHow to prepare firmwareiancourtNo ratings yet
- While Start Drive Test Learning, You Must Know The Basic Things! These All Conotents Are at Introductory LevelDocument15 pagesWhile Start Drive Test Learning, You Must Know The Basic Things! These All Conotents Are at Introductory LevelRakesh SolankiNo ratings yet
- Altronics CD200D BLLTN 04-2010 PDFDocument2 pagesAltronics CD200D BLLTN 04-2010 PDFSMcNo ratings yet
- Design a Cellphone-based ECG MonitorDocument22 pagesDesign a Cellphone-based ECG MonitorMona NaiduNo ratings yet
- Third Gen Inkjet CTP From Glunz & JensenDocument3 pagesThird Gen Inkjet CTP From Glunz & JensenChristopher AllenNo ratings yet
- University of Engineering and Technology Taxila Mechanical Engineering DepartmentDocument32 pagesUniversity of Engineering and Technology Taxila Mechanical Engineering DepartmentAsad ullahNo ratings yet
- 2CTC431106D0201 Ovr PV T1-T2 5-1500 P TS QSDocument1 page2CTC431106D0201 Ovr PV T1-T2 5-1500 P TS QSLucianNo ratings yet
- Hac LM96Document15 pagesHac LM96RowelltoNo ratings yet
- SEBV2579Document26 pagesSEBV2579Alejandro Alberto Robalino MendezNo ratings yet
- Vacumat 22 22TDocument2 pagesVacumat 22 22TSandeep ChhonkerNo ratings yet
- Solution Manual of Mobile Communication and NetworksDocument5 pagesSolution Manual of Mobile Communication and NetworksZarnigar AltafNo ratings yet
- Amity University Greater Noida: in Partial Fulfillment Toward The Award ofDocument18 pagesAmity University Greater Noida: in Partial Fulfillment Toward The Award oftestingNo ratings yet
- MBI5026Document16 pagesMBI5026Racer RacerNo ratings yet
- CartconvDocument3 pagesCartconvoldmangoyaNo ratings yet
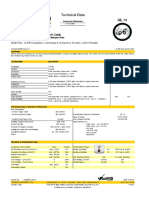
- UL13 Instrumentation Cable Technical DataDocument1 pageUL13 Instrumentation Cable Technical DataMario MejiaNo ratings yet
- 8-Noss Matrix l2Document2 pages8-Noss Matrix l2zuraiahNo ratings yet