You might also like
- 4 Lagrange Method of InterpolationDocument2 pages4 Lagrange Method of Interpolationfekremariam AmbawNo ratings yet
- JNU-2008 PaperDocument9 pagesJNU-2008 PaperVivek SharmaNo ratings yet
- NUMERICAL ANALYSIS ASSIGNMENTSDocument6 pagesNUMERICAL ANALYSIS ASSIGNMENTSMohamed Faye100% (1)
- Maths Practice Paper 10 With AnswersDocument17 pagesMaths Practice Paper 10 With AnswersVijay KesanapalliNo ratings yet
- AP Calc Exam2Document25 pagesAP Calc Exam2Jordan Miles100% (1)
- AP Calculus BC Released Exam 2008 Multiple-Choice Questions (College Board)Document26 pagesAP Calculus BC Released Exam 2008 Multiple-Choice Questions (College Board)vingts100% (1)
- Class - 11 (Maths) MCQ'S: Write X (1, 4, 9, 16, 25, ) in Set Builder FormDocument9 pagesClass - 11 (Maths) MCQ'S: Write X (1, 4, 9, 16, 25, ) in Set Builder FormNationFirst IndianNo ratings yet
- 2013 Maths Studies Exam PaperDocument44 pages2013 Maths Studies Exam PaperTifeny SengNo ratings yet
- Algebraans10 PDFDocument6 pagesAlgebraans10 PDFสฮาบูดีน สาและNo ratings yet
- BC Calculus students review finding slopes of curves defined parametrically or in polar formDocument23 pagesBC Calculus students review finding slopes of curves defined parametrically or in polar formNur ARSLANNo ratings yet
- ISI KolkataDocument32 pagesISI KolkatagaurishkorpalNo ratings yet
- AP Calculus AB Exam: Section I Practice QuestionsDocument18 pagesAP Calculus AB Exam: Section I Practice QuestionsDSaulBNo ratings yet
- SAT Subject Math Level 1 Practice Test 4 PDFDocument20 pagesSAT Subject Math Level 1 Practice Test 4 PDFMuqadsa BatoolNo ratings yet
- MCA Model QuestionDocument11 pagesMCA Model QuestionParashar DasNo ratings yet
- Five Points Each. Total 150 Points. Multiple Choice Math TestDocument5 pagesFive Points Each. Total 150 Points. Multiple Choice Math Testสฮาบูดีน สาและ100% (2)
- Test 2Document17 pagesTest 2Lee LeoNo ratings yet
- Solving systems of linear equationsDocument25 pagesSolving systems of linear equationsmvdurgadeviNo ratings yet
- Usa Amc - 12 1966 44 182Document4 pagesUsa Amc - 12 1966 44 182asharma_380004No ratings yet
- Linear Equations PDFDocument11 pagesLinear Equations PDFSyed ShoebNo ratings yet
- FE Exam Review - Mathematics - Example ProblemsDocument9 pagesFE Exam Review - Mathematics - Example Problemsumoja87No ratings yet
- 10th Maths Important QUARTERLY QnsDocument27 pages10th Maths Important QUARTERLY Qnskaviyarani74No ratings yet
- Miii Sample 2011Document24 pagesMiii Sample 2011Nilanjan SarkarNo ratings yet
- CRT Practice Problems FinalDocument7 pagesCRT Practice Problems Finalshirinyazdani2001No ratings yet
- SAT MATH LEVEL 2 TITLEDocument27 pagesSAT MATH LEVEL 2 TITLELeo LiuNo ratings yet
- Msqe Pea 2016Document11 pagesMsqe Pea 2016blahblahNo ratings yet
- SPM AddMath Formula List NOT GivenDocument10 pagesSPM AddMath Formula List NOT GivenYoke Hock Seow100% (1)
- Mathematics Question Bank For HighschoolDocument412 pagesMathematics Question Bank For HighschoolPintoSenkoNo ratings yet
- Maths PDFDocument4 pagesMaths PDFSanket PatilNo ratings yet
- Mathematics exam questions on vectors, matrices, calculus and probabilityDocument7 pagesMathematics exam questions on vectors, matrices, calculus and probabilityRajkumarNo ratings yet
- 1 1 1 Tan Tan Tan 1 2 1 2 3 1 3 4 + + + + + + 1 ...... Tan 1 1 + + + Sin Cos 1 Sin +Document10 pages1 1 1 Tan Tan Tan 1 2 1 2 3 1 3 4 + + + + + + 1 ...... Tan 1 1 + + + Sin Cos 1 Sin +Ankit MishraNo ratings yet
- Final PDFDocument41 pagesFinal PDFRaj Roy50% (2)
- OCET 2010 MCA Exam with 75 Questions and 90 Minutes DurationDocument17 pagesOCET 2010 MCA Exam with 75 Questions and 90 Minutes DurationkicksickNo ratings yet
- Time: 3 Hours 06 - Mathematics - July 2008 Marks: 100 PG - 1Document6 pagesTime: 3 Hours 06 - Mathematics - July 2008 Marks: 100 PG - 1SURAJ SINGHNo ratings yet
- Numerical Analysis MCQDocument15 pagesNumerical Analysis MCQmansoormani20167% (9)
- Mma 2018Document6 pagesMma 2018Nikhil YenumulaNo ratings yet
- Quiz 05inp Newton SolutionDocument7 pagesQuiz 05inp Newton SolutionErnesto Vergara Jr.No ratings yet
- 2021 Exam Questions-BDocument5 pages2021 Exam Questions-BGiovana BogadoNo ratings yet
- Alabama Statewide Math Contest Division I Comprehensive ExamDocument7 pagesAlabama Statewide Math Contest Division I Comprehensive ExamAlfredo EsquivelNo ratings yet
- Test 1 MathsDocument4 pagesTest 1 MathsUtsav AnalNo ratings yet
- Matemática - Banco de Questões P/ IIT-JEEDocument226 pagesMatemática - Banco de Questões P/ IIT-JEEmatheusbert100% (3)
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- ATI TEAS Calculation Workbook: 300 Questions to Prepare for the TEAS (2023 Edition)From EverandATI TEAS Calculation Workbook: 300 Questions to Prepare for the TEAS (2023 Edition)No ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Cambridge Mathematics AS and A Level Course: Second EditionFrom EverandCambridge Mathematics AS and A Level Course: Second EditionNo ratings yet
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970From EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)From EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)No ratings yet
- AFS 337 NotesDocument1 pageAFS 337 NotesElianne GabbayNo ratings yet
- ESG 332 Practice Exam 1Document2 pagesESG 332 Practice Exam 1Elianne Gabbay0% (2)
- AFS 337 Notes 10-20Document1 pageAFS 337 Notes 10-20Elianne GabbayNo ratings yet
- Mec 214 HW1Document2 pagesMec 214 HW1Elianne GabbayNo ratings yet
- MEC 364 - Homework 1 SolutionDocument2 pagesMEC 364 - Homework 1 SolutionElianne GabbayNo ratings yet
- Jewish Holidays 2015-16Document2 pagesJewish Holidays 2015-16Elianne GabbayNo ratings yet
- AP Physics Question BankDocument99 pagesAP Physics Question BankElianne Gabbay100% (2)
- Functional NotationDocument1 pageFunctional NotationElianne GabbayNo ratings yet
- MEC 364 - Homework 7Document1 pageMEC 364 - Homework 7Elianne GabbayNo ratings yet
- Jacobi and Gauss-SeidelDocument1 pageJacobi and Gauss-SeidelElianne GabbayNo ratings yet
- MEC 320 Homework 9Document1 pageMEC 320 Homework 9Elianne GabbayNo ratings yet
- Program Planning Worksheet With Final Examination Periods - Fall 2014Document1 pageProgram Planning Worksheet With Final Examination Periods - Fall 2014Elianne GabbayNo ratings yet
- Park - Fundamentals of Engineering Economics - 2nd Edition - Solution Manual - ch2Document15 pagesPark - Fundamentals of Engineering Economics - 2nd Edition - Solution Manual - ch2Mobin Akhand50% (6)
- WedmDocument1 pageWedmElianne GabbayNo ratings yet
- Assign 1 Answer PDFDocument2 pagesAssign 1 Answer PDFGiezel MadurarNo ratings yet
- Multi Point ConstraintsDocument53 pagesMulti Point ConstraintsAmanda SmithNo ratings yet
- Analysis of Related in AmoxycillinDocument14 pagesAnalysis of Related in Amoxycilliniabureid7460No ratings yet
- Pract Exam 1Document5 pagesPract Exam 1Deepak Kumar DubeyNo ratings yet
- L5 MU EE1ME - Differentiation - STDDocument25 pagesL5 MU EE1ME - Differentiation - STDDinNo ratings yet
- Mast333 4 19Document2 pagesMast333 4 19fdsfdfNo ratings yet
- HPLC - GCDocument28 pagesHPLC - GCTayyaba SadaqNo ratings yet
- ExamDocument2 pagesExamApril KimNo ratings yet
- UG MathematicsDocument65 pagesUG MathematicsSubhaNo ratings yet
- The Statistical Tools - CompleteDocument29 pagesThe Statistical Tools - CompleteJake CanlasNo ratings yet
- The Mind and The Book A Long Look at Psychoanalytic Literary CriticismDocument7 pagesThe Mind and The Book A Long Look at Psychoanalytic Literary CriticismFlorentina Tarina100% (1)
- Slide-4 Frequency Analysis of Signal - 1Document28 pagesSlide-4 Frequency Analysis of Signal - 1musaNo ratings yet
- CR Equations CompleteDocument22 pagesCR Equations CompleteManav MehtaNo ratings yet
- CourseIntroduce ST MAS202Document12 pagesCourseIntroduce ST MAS202(FU HCM) Trần Thanh HiệpNo ratings yet
- Human Error and Accident Causation Theories Frameworks and Analy PDFDocument51 pagesHuman Error and Accident Causation Theories Frameworks and Analy PDFJUNGPHNo ratings yet
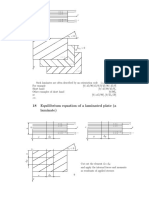
- 18 Equilibrium Equation of A Laminated Plate (A Laminate)Document8 pages18 Equilibrium Equation of A Laminated Plate (A Laminate)Khalil DeghoumNo ratings yet
- Statistical TestsDocument15 pagesStatistical Testscharlene quiambaoNo ratings yet
- ProbabilityII HW9 SolutionsDocument4 pagesProbabilityII HW9 SolutionsAurivasNo ratings yet
- Chapter 14 Principle of Neutralization TDocument29 pagesChapter 14 Principle of Neutralization TS. MartinezNo ratings yet
- Lab ReportDocument3 pagesLab ReportClayton VerBerkmösNo ratings yet
- Wk1 - Introduction To Nursing ResearchDocument37 pagesWk1 - Introduction To Nursing ResearchSophia GraziellaNo ratings yet
- AOAC Official Method 2011.006 FolateDocument1 pageAOAC Official Method 2011.006 Folatemuthu kumarNo ratings yet
- Formula For Hypothesis TestingDocument5 pagesFormula For Hypothesis TestingLourdan ElabaNo ratings yet
- Operations Management (OPM530) C10 Project ManagementDocument30 pagesOperations Management (OPM530) C10 Project Managementazwan ayopNo ratings yet
- 10 Lagrange Eqautions MDOFDocument3 pages10 Lagrange Eqautions MDOFsaeed al-zahraniNo ratings yet
- Question Bank MOD and Indefinite IntegrationDocument15 pagesQuestion Bank MOD and Indefinite IntegrationRAKTIM ROUTHNo ratings yet
- Workshop 1 - Problem Solving (Development)Document12 pagesWorkshop 1 - Problem Solving (Development)Oscar HurtadoNo ratings yet
- Calculus 3 TextDocument207 pagesCalculus 3 TextAhmadMoaazNo ratings yet
- Complex Variables TheoryDocument2 pagesComplex Variables TheorySanjar Abbasi100% (1)
- Makalah Metopen Group 1Document12 pagesMakalah Metopen Group 1dwi ayu nabilaNo ratings yet