You might also like
- Build A Gameboy Color Programming Cartridge With Mbc5 Chip and Am29F032B-90Sd Flash ChipDocument2 pagesBuild A Gameboy Color Programming Cartridge With Mbc5 Chip and Am29F032B-90Sd Flash ChipRicardoNo ratings yet
- BallDocument2 pagesBallMelanie ManriquezNo ratings yet
- Chart - Stitch FiddleDocument2 pagesChart - Stitch FiddleSani ImamahNo ratings yet
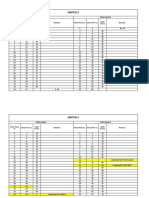
- Switch 5: Switch Port No. Remarks Patch Panel No. Switch Port No. Remarks Patch Panel No. Vlan Group Vlan GroupDocument2 pagesSwitch 5: Switch Port No. Remarks Patch Panel No. Switch Port No. Remarks Patch Panel No. Vlan Group Vlan GroupIrish Mae JovitaNo ratings yet
- Cabinet 2 TracingDocument2 pagesCabinet 2 TracingIrish Mae JovitaNo ratings yet
- Tad520ve, Tad720ve, Tad721ve, Tad722ve PDFDocument441 pagesTad520ve, Tad720ve, Tad721ve, Tad722ve PDFKrisna Adiputra Wijaya100% (1)
- TAD750VE Spare PartsDocument100 pagesTAD750VE Spare PartsAnonymous I6U56Ib100% (2)
- Volvo Tad750ve Spare PartsDocument100 pagesVolvo Tad750ve Spare PartsshinichieNo ratings yet
- Research on Commercial Contract Breaches for Goods SalesDocument42 pagesResearch on Commercial Contract Breaches for Goods SalesAmal wickramathungaNo ratings yet
- Ward Map Gis FaridabadDocument1 pageWard Map Gis FaridabadDevarshi PariharNo ratings yet
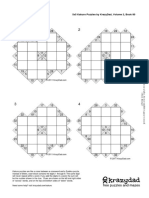
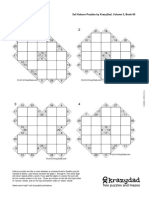
- KD Kakuro 5x5 v2 s2 b080Document3 pagesKD Kakuro 5x5 v2 s2 b080RADU GABINo ratings yet
- Ryobi RBS904 Manual 1Document21 pagesRyobi RBS904 Manual 1Woradon NarasettekunNo ratings yet
- Award Results 2014 Sessions Pavement & TransportationDocument2 pagesAward Results 2014 Sessions Pavement & TransportationsezulfiqarNo ratings yet
- Parts ListDocument19 pagesParts ListvicnitNo ratings yet
- Sewer Maps LargescaleDocument3 pagesSewer Maps LargescaleAlfred ChaseNo ratings yet
- T T 24915 Christmas Activity Book - Ver - 8Document86 pagesT T 24915 Christmas Activity Book - Ver - 8TetianaNo ratings yet
- Ielts Listening Answer SheetDocument2 pagesIelts Listening Answer SheetBube AdelajaNo ratings yet
- Frequency of Error Subject: 21st Century LiteratureDocument9 pagesFrequency of Error Subject: 21st Century LiteratureResurrecion CandelonNo ratings yet
- PL Necchi Ec100Document19 pagesPL Necchi Ec100donnie ashleyNo ratings yet
- Blank Answer Sheet ListeningDocument2 pagesBlank Answer Sheet Listeningsiti nurhayatiNo ratings yet
- Assign6 Paired T TestDocument2 pagesAssign6 Paired T TestNilu Dz SilvaNo ratings yet
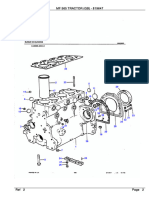
- Massey Ferguson MF 565 TRACTOR (GB) Service Parts Catalogue Manual (Part Number 819647)Document15 pagesMassey Ferguson MF 565 TRACTOR (GB) Service Parts Catalogue Manual (Part Number 819647)qlb898316No ratings yet
- Spare Parts 952VEDocument214 pagesSpare Parts 952VESergio Suárez RiesgoNo ratings yet
- CrosswordDocument2 pagesCrosswordkqfzftjh79No ratings yet
- Instrument Panel J/B Left Side of Instrument Panel (See Page 21)Document3 pagesInstrument Panel J/B Left Side of Instrument Panel (See Page 21)Luis AlbertoNo ratings yet
- Staad Pro MaterialDocument77 pagesStaad Pro MaterialManasa Rddy100% (2)
- KD Kakuro 5x5 v3 s2 b029Document3 pagesKD Kakuro 5x5 v3 s2 b029RADU GABINo ratings yet
- Volvo Tad164 - Part NumbersDocument99 pagesVolvo Tad164 - Part Numberstelogix559No ratings yet
- KD Kakuro 5x5 v3 s2 b060Document3 pagesKD Kakuro 5x5 v3 s2 b060RADU GABINo ratings yet
- Volvo Penta Parts Td520ge Tad530ge Td720ge Tad730Document322 pagesVolvo Penta Parts Td520ge Tad530ge Td720ge Tad730Xxxxxxxxxxxx100% (2)
- Model Janome 3050DC. Parts ListDocument18 pagesModel Janome 3050DC. Parts ListИгорь ИвановNo ratings yet
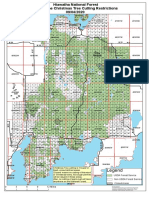
- West Zone Christmas Trees 2020Document1 pageWest Zone Christmas Trees 2020Joseph GehartNo ratings yet
- Diagnostic Answer SheetDocument1 pageDiagnostic Answer SheetSusana CorderoNo ratings yet
- WALL E ArmableDocument6 pagesWALL E ArmableAnonymous XMfYIX100% (1)
- Listening Answer SheetDocument2 pagesListening Answer SheetNikhil KumarNo ratings yet
- Semi Trailer Tractor Truck BordenDocument5 pagesSemi Trailer Tractor Truck BordenPedro TorresNo ratings yet
- NO TGL Jenis Kegiatan Tempat NO TGL Jenis Kegiatan Tempat: Jadwal Kegiatan Harian Nama: BulanDocument1 pageNO TGL Jenis Kegiatan Tempat NO TGL Jenis Kegiatan Tempat: Jadwal Kegiatan Harian Nama: BulanAnonymous bh4ln5quNo ratings yet
- MAPEH Item Analysis Q3Document3 pagesMAPEH Item Analysis Q3Keeno cruzNo ratings yet
- Answer Sheet Answer SheetDocument2 pagesAnswer Sheet Answer Sheetyannie isananNo ratings yet
- Papercraft Sloth: Recommended MaterialsDocument16 pagesPapercraft Sloth: Recommended MaterialsccNo ratings yet
- Five Little Monkeys Connect The Dots 1Document1 pageFive Little Monkeys Connect The Dots 1Mc DonaldNo ratings yet
- IELTS Reading Answer SheetDocument1 pageIELTS Reading Answer SheetRohit Kumar MohantyNo ratings yet
- Answer SheetDocument1 pageAnswer SheetRobin AndrewNo ratings yet
- Kort 2 - Rønne PlantageDocument1 pageKort 2 - Rønne PlantageBoNo ratings yet
- MQ1 PredatorDocument5 pagesMQ1 PredatorJan mrnaNo ratings yet
- MAPEH Item Analysis Q2Document3 pagesMAPEH Item Analysis Q2Keeno cruzNo ratings yet
- Label JointDocument1 pageLabel JointFarhan NuaryNo ratings yet
- Topic 5 DQ 1Document7 pagesTopic 5 DQ 1James BavingNo ratings yet
- Formative Assessment 4Document2 pagesFormative Assessment 4Aries BerbieNo ratings yet
- Ielts Listening Answer SheetDocument1 pageIelts Listening Answer SheetRohit Kumar MohantyNo ratings yet
- Service Manual: Wash 250 XTDocument25 pagesService Manual: Wash 250 XTSilverio SogorbNo ratings yet
- Item Analysis.1STPT MAYODocument24 pagesItem Analysis.1STPT MAYOeven vivarNo ratings yet
- 2013.02.04 - Manual Partes Tad1640ge, Tad1641ge, Tad1642ge, Twd1643ge, Tad1650ge, Tad1651ge, Twd1663ge, Twg1663geDocument338 pages2013.02.04 - Manual Partes Tad1640ge, Tad1641ge, Tad1642ge, Twd1643ge, Tad1650ge, Tad1651ge, Twd1663ge, Twg1663geedberNo ratings yet
- MC 350E Parts List TitleDocument24 pagesMC 350E Parts List TitleparaibamaqNo ratings yet
- Janome 1522Document20 pagesJanome 1522miquelsintesNo ratings yet
- Gender opinion chartDocument2 pagesGender opinion chartadriano vanzaNo ratings yet
- Gender opinion chartDocument2 pagesGender opinion chartadriano vanzaNo ratings yet
- Score SheetDocument1 pageScore Sheetgdipesh01No ratings yet
- Flood Pulsing in Wetlands: Restoring the Natural Hydrological BalanceFrom EverandFlood Pulsing in Wetlands: Restoring the Natural Hydrological BalanceNo ratings yet
- Building Ideas: An Architectural Guide to the University of ChicagoFrom EverandBuilding Ideas: An Architectural Guide to the University of ChicagoRating: 4.5 out of 5 stars4.5/5 (2)
- ?vfvcdtyvz - F - XV - Z - Uvcdtyczwev - Cvzyvuvdd73: Cva'Ce?'"%Document14 pages?vfvcdtyvz - F - XV - Z - Uvcdtyczwev - Cvzyvuvdd73: Cva'Ce?'"%postscriptNo ratings yet
- PatentsDocument9 pagesPatentspostscript100% (1)
- Wenke Discex00Document15 pagesWenke Discex00postscriptNo ratings yet
- EdcDocument25 pagesEdcpostscriptNo ratings yet
- Is Lumpy Investment Relevant For The Business Cycle?Document31 pagesIs Lumpy Investment Relevant For The Business Cycle?postscriptNo ratings yet
- It2 Fact SheetDocument2 pagesIt2 Fact SheetpostscriptNo ratings yet
- PRPR 0118Document6 pagesPRPR 0118postscriptNo ratings yet
- 20 AmortDocument7 pages20 AmortpostscriptNo ratings yet
- Lec 6Document6 pagesLec 6postscriptNo ratings yet
- Solution To Mock Midterm 2: 1 Allais-Baumol-Tobin ModelDocument4 pagesSolution To Mock Midterm 2: 1 Allais-Baumol-Tobin ModelpostscriptNo ratings yet
- Approximating Prices of Bonds With Log - Normal Interest RateDocument17 pagesApproximating Prices of Bonds With Log - Normal Interest RatepostscriptNo ratings yet
- C M S 2004 International Press Vol. 2, No. 1, Pp. 137-144: Omm. Ath. CIDocument8 pagesC M S 2004 International Press Vol. 2, No. 1, Pp. 137-144: Omm. Ath. CIpostscriptNo ratings yet
- PaperDocument4 pagesPaperpostscriptNo ratings yet
- Scalable, Tax Evasion-Free Anonymous InvestingDocument8 pagesScalable, Tax Evasion-Free Anonymous InvestingpostscriptNo ratings yet
- TestsecDocument5 pagesTestsecpostscriptNo ratings yet
- Chip To Kapton Bonding Procedur1Document4 pagesChip To Kapton Bonding Procedur1postscriptNo ratings yet
- Corporate Hedging: What, Why and How?Document48 pagesCorporate Hedging: What, Why and How?postscriptNo ratings yet
- ZengerDocument38 pagesZengerpostscriptNo ratings yet
- HagjoycombesDocument12 pagesHagjoycombespostscriptNo ratings yet
- LM 02Document12 pagesLM 02postscriptNo ratings yet
- BrnoDocument35 pagesBrnopostscriptNo ratings yet
- Encouraging Cooperative Solution of Mathematics ProblemsDocument9 pagesEncouraging Cooperative Solution of Mathematics ProblemspostscriptNo ratings yet
- NM Ad'S Statement of Disclosure: Mrose - Iesg@dbc - Mtview.ca - UsDocument13 pagesNM Ad'S Statement of Disclosure: Mrose - Iesg@dbc - Mtview.ca - UspostscriptNo ratings yet
- Hagjoy 10 CMPDocument31 pagesHagjoy 10 CMPpostscriptNo ratings yet
- SnackenDocument9 pagesSnackenpostscriptNo ratings yet
- CVDocument12 pagesCVpostscriptNo ratings yet
- Gaining Confidence in Mathematics: Instructional Technology For GirlsDocument8 pagesGaining Confidence in Mathematics: Instructional Technology For GirlspostscriptNo ratings yet
- Net NeutralityDocument19 pagesNet Neutralitypostscript100% (1)
- Srikant SlidesDocument27 pagesSrikant SlidespostscriptNo ratings yet
- Smooth SailingDocument9 pagesSmooth SailingNancyNo ratings yet
- G10 Q1 Health Module 3Document11 pagesG10 Q1 Health Module 3Manuel Rosales Jr.No ratings yet
- Gen Physics 1 Wk3Document10 pagesGen Physics 1 Wk3Hannah Bianca RegullanoNo ratings yet
- Short ChemistryDocument121 pagesShort ChemistryNAVEEN KUMAR SINGHNo ratings yet
- Penggolongan Obat 1Document27 pagesPenggolongan Obat 1Dias Angga PerdanaNo ratings yet
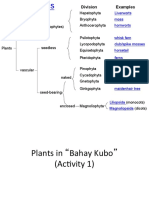
- Bahay KuboDocument21 pagesBahay KuboEulalio NinaNo ratings yet
- A Primer On Reformed Theology: Part of The Introduction To Spiritual Leadership ConferenceDocument93 pagesA Primer On Reformed Theology: Part of The Introduction To Spiritual Leadership ConferenceChrist Presbyterian Church, New HavenNo ratings yet
- 4.DC Biasing - BJTsDocument77 pages4.DC Biasing - BJTsNimra AftabNo ratings yet
- Maths Chapter on Circles ExercisesDocument38 pagesMaths Chapter on Circles ExercisesHemant KumarNo ratings yet
- Designing Winning PalatantsDocument12 pagesDesigning Winning PalatantsDante Lertora BavestrelloNo ratings yet
- Syllabus: Cambridge IGCSE® Food & Nutrition 0648Document23 pagesSyllabus: Cambridge IGCSE® Food & Nutrition 0648Tadiswa ChloeNo ratings yet
- Brown Eyes Caramel ThighsDocument4 pagesBrown Eyes Caramel ThighsFremille MartinezNo ratings yet
- BASE METAL ALLOYS FOR DENTAL APPLICATIONSDocument85 pagesBASE METAL ALLOYS FOR DENTAL APPLICATIONSmeghaNo ratings yet
- Green HydrogenDocument15 pagesGreen HydrogenAbdul RahmanNo ratings yet
- Thervupettagam January 2024 - EnglishDocument198 pagesThervupettagam January 2024 - EnglishMukesh KannanNo ratings yet
- Nylosolv Additiv A ENDocument1 pageNylosolv Additiv A ENMohammed Abdul HaleemNo ratings yet
- Guidelines For Optimum Water Consumption in Bulk Drugs Manufacturing Industry PDFDocument128 pagesGuidelines For Optimum Water Consumption in Bulk Drugs Manufacturing Industry PDFSivakumar SelvarajNo ratings yet
- PEMERIKSAAN THORAX AND JANTUNGDocument59 pagesPEMERIKSAAN THORAX AND JANTUNGImada KhoironiNo ratings yet
- Guage Thickness in MM Weight Per Sq. Ft. Weight Per Pc. Kgs. Pc. IN M/TonDocument3 pagesGuage Thickness in MM Weight Per Sq. Ft. Weight Per Pc. Kgs. Pc. IN M/TonDipendra MaharjanNo ratings yet
- Recovery and Concentration of Precious Metals From Strong Acidic WastewaterDocument9 pagesRecovery and Concentration of Precious Metals From Strong Acidic WastewaterAmmar JabbarNo ratings yet
- 學測部分試題小測Document3 pages學測部分試題小測蘇文采No ratings yet
- Micronutrients in Hair LossDocument9 pagesMicronutrients in Hair LossIkbal Adi SaputraNo ratings yet
- Weather ProjectDocument4 pagesWeather Projectapi-271953090No ratings yet
- EC8702 Ad Hoc and Wireless Sensor NetworksDocument2 pagesEC8702 Ad Hoc and Wireless Sensor NetworksPraveen KumarNo ratings yet
- Foods Benefit Body SystemDocument25 pagesFoods Benefit Body SystemjayandrewNo ratings yet
- The SeafarerDocument3 pagesThe SeafarerBogdan AndreiNo ratings yet
- EWD-H-KXJ3 Elevator Load Weighing GuideDocument10 pagesEWD-H-KXJ3 Elevator Load Weighing GuideKang RohendyNo ratings yet
- Soal Semester Genap 2019 Kelas XII Bahasa InggrisDocument9 pagesSoal Semester Genap 2019 Kelas XII Bahasa InggrisWalid UmarNo ratings yet
- Introduction To Experimental PsychologyDocument27 pagesIntroduction To Experimental PsychologyJhonel NautanNo ratings yet
- DETAILED LESSON PLAN Earth and Life Sciences Grade 11 Week 7Document8 pagesDETAILED LESSON PLAN Earth and Life Sciences Grade 11 Week 7Austin Capal Dela Cruz50% (2)