You might also like
- Roca William - Cultivo de Tejidos en La Agricultura (2007)Document960 pagesRoca William - Cultivo de Tejidos en La Agricultura (2007)Javier Solana CampoyNo ratings yet
- S11 s3 LABORATORIO CALIFICADO 3 GUIA DE TRABAJODocument5 pagesS11 s3 LABORATORIO CALIFICADO 3 GUIA DE TRABAJOElizabeth AlmironNo ratings yet
- Marcello Carmagnani - Estado y Sociedad en América LatinaDocument128 pagesMarcello Carmagnani - Estado y Sociedad en América LatinaNelson Córdoba100% (1)
- Intubación Endotraqueal RNDocument51 pagesIntubación Endotraqueal RNJosé Flores ValenzuelaNo ratings yet
- Apuntes 1Document7 pagesApuntes 1J Maximino SalazarNo ratings yet
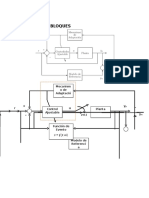
- Diagrama A Bloques Control AdaptativoDocument1 pageDiagrama A Bloques Control AdaptativoLessia MonserratNo ratings yet
- Revista No. 5 Articulo No. 60Document6 pagesRevista No. 5 Articulo No. 60Lessia MonserratNo ratings yet
- Aplicacion MotorDC PDFDocument25 pagesAplicacion MotorDC PDFFelipe GuevaraNo ratings yet
- Mod MatematicoDocument8 pagesMod MatematicoLessia MonserratNo ratings yet
- Estabilizacion Del Pendulo Invertido Sobre Dos Ruedas Mediante El Metodo de LyapunovDocument7 pagesEstabilizacion Del Pendulo Invertido Sobre Dos Ruedas Mediante El Metodo de LyapunovLessia MonserratNo ratings yet
- Modelamiento de La Marcha Humana Por Medio de Gráficos de UniónDocument17 pagesModelamiento de La Marcha Humana Por Medio de Gráficos de UniónHipólito AguilarNo ratings yet
- 01 21 PDFDocument12 pages01 21 PDFLessia MonserratNo ratings yet
- Mod Sigma DeltaDocument3 pagesMod Sigma DeltaLessia MonserratNo ratings yet
- Circuitos III Practica 1-09-03 1Document16 pagesCircuitos III Practica 1-09-03 1Lessia MonserratNo ratings yet
- Cap 1 Sy SeñalesDocument40 pagesCap 1 Sy SeñalesLessia MonserratNo ratings yet
- 07 Integracion Compleja v08s02Document9 pages07 Integracion Compleja v08s02msterwillNo ratings yet
- 2 Anatomia Musculo EsqueleticaDocument16 pages2 Anatomia Musculo EsqueleticaDiego MartínezNo ratings yet
- Secado por atomización: introducción, componentes y mecanismoDocument31 pagesSecado por atomización: introducción, componentes y mecanismoalisNo ratings yet
- Utencilios de CocinaDocument4 pagesUtencilios de CocinaCristian DominguezNo ratings yet
- Expo1 Materiales G7Document16 pagesExpo1 Materiales G7Andres LopezNo ratings yet
- ACTIVIDA2Document6 pagesACTIVIDA2Erika LobatonNo ratings yet
- Ensayo Intervenciones de Vias UrinariasDocument8 pagesEnsayo Intervenciones de Vias UrinariasAngelo PérezNo ratings yet
- Perfil C.P. Espital - La Peca - BaguaDocument68 pagesPerfil C.P. Espital - La Peca - BaguaEnriqueGabrielBeraúnCoronelNo ratings yet
- Ontología y Lenguaje de La Realidad SocialDocument10 pagesOntología y Lenguaje de La Realidad SocialCinta de MoebioNo ratings yet
- Artropodos PDFDocument38 pagesArtropodos PDFjuan guillermo torres ramosNo ratings yet
- Titeres y AutoestimaDocument98 pagesTiteres y AutoestimarosmeryNo ratings yet
- Sistprod CitricosDocument249 pagesSistprod CitricosEmmanuel EspinNo ratings yet
- La LATTICE y La ESTRUCTURA Del ESPACIODocument5 pagesLa LATTICE y La ESTRUCTURA Del ESPACIOLuis ChavezNo ratings yet
- Plan de Manejo AmbientalDocument31 pagesPlan de Manejo AmbientalYajhaira Mirshall Salvatierra PalianNo ratings yet
- Colico TromboembolicoDocument14 pagesColico TromboembolicoSheryl Avilés PintoNo ratings yet
- Especificaciones Tecnicas ColiseoDocument17 pagesEspecificaciones Tecnicas ColiseoJOVANNA MENDOZANo ratings yet
- 084 Los Hombres de La Historia Engels E Ragionieri CEAL 1969Document32 pages084 Los Hombres de La Historia Engels E Ragionieri CEAL 1969pedro bop BopNo ratings yet
- Práctica 5 de EmbriologíaDocument15 pagesPráctica 5 de EmbriologíaEvelyn Monserrat Espinosa MartinezNo ratings yet
- Reporte Practica 4Document3 pagesReporte Practica 4Bryan MirandaNo ratings yet
- Auges Del EcuadorDocument11 pagesAuges Del EcuadorCustodio PaolaNo ratings yet
- Circulación TermohalinaDocument4 pagesCirculación TermohalinaDiego Guillen GuillenNo ratings yet
- CasabeDocument7 pagesCasabeAndrea SánchezNo ratings yet
- Diseño de programa de cosecha para cultivos de estación fríaDocument3 pagesDiseño de programa de cosecha para cultivos de estación fríaMaicol VizaNo ratings yet
- Solubilidad de SustanciasDocument6 pagesSolubilidad de SustanciasMary'ang Cardoza SernaNo ratings yet
- Foro Tematico de Instalacion y Control de Maquinas de Corriente ContinuaDocument5 pagesForo Tematico de Instalacion y Control de Maquinas de Corriente ContinuaBryan AscNo ratings yet
- Norma Mexicana Prevención Incendios Centros TrabajoDocument52 pagesNorma Mexicana Prevención Incendios Centros TrabajoEDUARDONo ratings yet
- CEMENTODocument14 pagesCEMENTOHuber Antoni Quinto HilarioNo ratings yet